

ABSTRACT
Currently, a large number of industrial robots have been deployed to replace or assist humans to perform various repetitive and dangerous manufacturing tasks. However, based on current technological capabilities, such robotics field is rapidly evolving so that humans are not only sharing the same workspace with robots, but also are using robots as useful assistants. Consequently, due to this new type of emerging robotic systems, industrial collaborative robots or cobots, human and robot co-workers have been able to work side-by-side as collaborators to accomplish tasks in industrial environments. Therefore, new human–robot interaction systems have been developed for such systems to be able to utilize the capabilities of both humans and robots. Accordingly, this article presents a literature review of major recent works on human–robot interactions in industrial collaborative robots, conducted during the last decade (between 2008 and 2017). Additionally, the article proposes a tentative classification of the content of these works into several categories and sub-categories. Finally, this paper addresses some challenges of industrial collaborative robotics and explores future research issues.
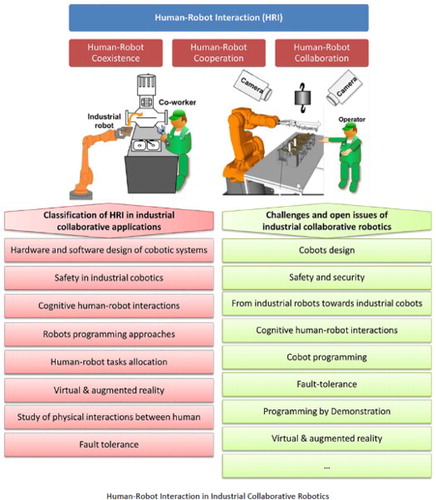
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Abdelfetah Hentout http://orcid.org/0000-0003-3851-7745
Mustapha Aouache http://orcid.org/0000-0003-1629-1183
Abderraouf Maoudj http://orcid.org/0000-0002-4058-2506
Isma Akli http://orcid.org/0000-0002-2332-0213
Additional information
Notes on contributors
Abdelfetah Hentout
Abdelfetah Hentout is affiliated with the ‘Centre de Développement des Technologies Avancées (CDTA)’. He holds a Ph.D. degree (2012) in ‘Robotics’ from the ‘University of Sciences and Technology Houari Boumediene (USTHB)’, a Magister degree (2004) in ‘Industrial informatics’ from the ‘Military Ploytechnic School (EMP)’ and an Engineer diploma (2000) in ‘Informatic systems’ from the ‘National Institute of Computer Science (INI)’ (Algeria). His research interests mainly focus on multi-agent systems, control architectures, flexible job-shop planning and scheduling, mobile manipulation, multi-robot systems, optimal path planning, telerobotics, cyber-physical systems and human/robot interaction.
Mustapha Aouache
Aouache Mustapha received the B.Sc. in ‘control and automation’ from ‘University M'hamed Bougara of Boumerdès (UMBB)’, Algeria; M.Sc. and Ph.D. in ‘Electrical, Electronic and Systems Engineering’ from ‘Universiti Kebangsaan Malaysia (UKM)’, respectively. Currently, he is a senior researcher in ‘Telecom Division’, ‘Centre de Développement des Technologies Avancées (CDTA)’, Algeria. His research interests are in the control system, image retrieval in medical applications, medical imaging and applications, medical CAD-PACS applications, pattern recognition, data mining and data sciences, deep learning and IoT connected healthcare/smart cities. He also has developed interests towards medical and healthcare robotics.
Abderraouf Maoudj
Maoudj Abderraouf received his M.Sc. degree in ‘Control and systems analysis’ from ‘University of Mohamed Seddik Ben Yahia (UMSBY)’ and a Ph.D. degree in ‘Robotics and control’ from ‘University of Sciences and Technology Houari Boumediene (USTHB)’ (Algeria), in 2012 and 2018, respectively. He is currently a senior researcher with the ‘Systèmes Robotisés de Production (SRP)’ research team in ‘Centre de Développement des Technologies Avancées (CDTA)’, Algeria. His research interests are robotics and electronics, robot navigation, artificial intelligence, human/robot interaction, intelligent manufacturing, optimization and distributed multi-agent systems.
Isma Akli
Akli Isma is currently affiliated with the ‘Systèmes Robotisés de Production (SRP)’ research team in ‘Centre de Développement des Technologies Avancées (CDTA)’. She obtained her Ph.D. degree in ‘Robotics and control’ in 2016 form the ‘University of Science and Technology Houari Boumediene (USTHB)’. Her research interests are mainly related to mobile manipulation, trajectory and task planning, mission allocation, human/robot interaction and teleoperation.