

ABSTRACT
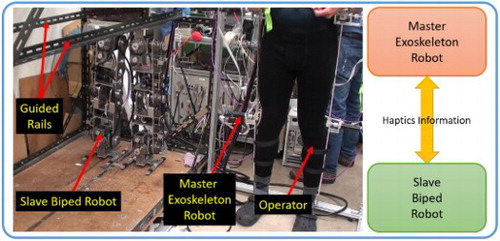
This paper proposes a novel, simultaneous bipedal locomotion method using haptics for remote operation of biped robots. In general, traditional biped walking methods require very high computational power and advanced controllers to perform the required task. However, in this proposed method, a master exoskeleton attached to the human’s lower body is used to obtain the trajectory and haptic information to generate the trajectory of the slave biped robot in real time. Lateral motion of the center of mass of the biped is constrained in this experiment. Also, it is considered that no communication delay is presented in between the two systems in this experiment, and they are not discussed in this paper. Since a direct motion transmission is used in the proposed method, this method is quite straight forward and a simultaneous walking can be realized at the same time with high performance. Also, it does not require an exact dynamic model of the biped or specific method to plan the trajectory. The gait pattern of the biped is directly determined by that of the human. Also, the operator can feel the remote environment through the exoskeleton robot. Results obtained from the experiments validate the proposed method.
GRAPHICAL ABSTRACT
Acknowledgements
Authors would like to thank Janaka Wijekoon, Rajitha Tennakoon, Shanaka Prageeth of Keio University and Dinesh Kodithuwakku of the Yokohama National University for their support while carrying out the experiments.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
Notes on contributors
D. Kasun Prasanga
D. Kasun Prasanga received his bachelor’s degree from the University of Moratuwa, Sri Lanka and master’s degree from the Keio University, Japan in 2010 and 2013, respectively. Currently, he is a Ph.D. candidate in the School of Integrated Design Engineering, Keio University, Japan. His research interests include haptics, motion control, biped locomotion and robotics.
Kazuki Tanida
Kazuki Tanida received the B.E. degree in system design engineering and the M.E. degree in integrated design engineering from the Keio University, Yokohama, Japan, in 2011 and 2013, respectively. He is currently with the system development department of Technology Research Center in the Sumitomo Heavy Industries. His research interests include system design engineering and robotics.
Kouhei Ohnishi
Kouhei Ohnishi received B.E., M.E., and Ph.D. in electrical engineering from The University of Tokyo, Tokyo, Japan, in 1975, 1977, and 1980, respectively. Since 1980, he has been with the Keio University, Yokohama, Japan and is a Professor at the Global Research Institute.
Toshiyuki Murakami
Toshiyuki Murakami received the B.E., M.E., and Ph.D. degrees in electrical engineering from the Keio University, Yokohama, Japan, in 1988, 1990, and 1993, respectively. In 1993, he joined the Department of Electrical Engineering, Keio University, where he is currently a Professor with the Department of System Design Engineering. From 1999 to 2000, he was a Visiting Researcher with the Institute for Power Electronics and Electrical Drives, Aachen University of Technology, Aachen, Germany. His research interests include robotics, intelligent vehicles, mobile robots, and motion control.