

ABSTRACT
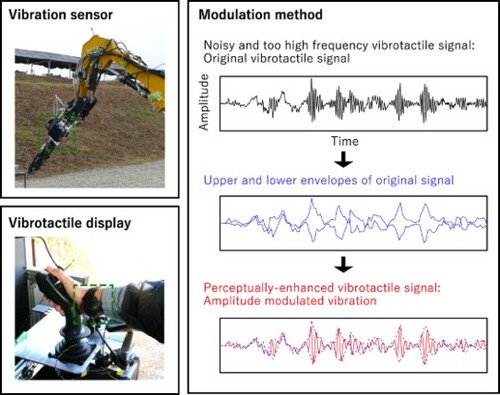
This study proposes a methodology to deliver contact information on construction robots to the remote operator by transmitting measured collision vibrations, which are often beyond the human-perceivable range. We focus on the human capacity to discriminate the envelope of high-frequency vibrations as an essential cue to perceive contact materials and collision conditions. The proposed method preserves the envelope shapes with amplitude-modulated waves with a single carrier frequency in the human sensitive range. In the preliminary experiments, a miniature shovel digging experiment confirmed that the proposed method improves the discriminability of the contact materials and sliding velocities. A psychophysical experiment also showed that the participants could discriminate the envelope differences irrespective of the carrier frequency. The proposed method was applied to the tactile transmission system for a construction robot developed in the ImPACT program. A vibration sensor was attached on the robot arm, and the vibrotactile feedback was applied to the operator's wrist. Performance evaluations under a delicate teleoperated task (insertion of a bar into bricks) showed that the peak force was reduced by the proposed method significantly for two out of the three participants. The results show that our proposal could improve the maneuverability of teleoperation.
GRAPHICAL ABSTRACT
Acknowledgments
This work was partially supported by the ImPACT Program “Tough Robotics Challenge,” and JSPS KAKENHI Grant Numbers JP18H01401 and JP18K13722.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Hikaru Nagano
Hikaru Nagano received the B.S., M.S., and Ph.D. degrees in engineering from Nagoya University, in 2010, 2012, and 2015, respectively. He was an Assistant Professor with Tohoku University, from 2015 to 2018. He is currently an Assistant Professor with the Graduate School of Engineering, Kobe University. His research interests include human haptic perception and human-machine interfaces.
Hideto Takenouchi
Hideto Takenouchi received the B.S. degree in engineering and the M.S. degree in information science from Tohoku University, in 2016 and 2018, respectively.
Nan Cao
Nan Cao received the B.S. degree in electronics science and technology (optical electronics) and the M.S. degree in optical engineering from the Beijing Institute of Technology, Beijing, China, in 2012 and 2015, respectively. He received the Ph.D. degree in information sciences from Tohoku University.
Masashi Konyo
Masashi Konyo (M'05) received the B.S., M.S., and Ph.D. degrees in engineering from Kobe University, in 1999, 2001, and 2004, respectively. He is currently an Associate Professor with the Graduate School of Information Sciences, Tohoku University. His research interests include haptic interfaces, rescue robotics, and new actuators. He was a recipient of the Young Scientists Prize, a Commendation for Science and Technology by MEXT in 2015, the Best Paper Award from the Journal of Robotics and Mechatronics, in 2010, and Advanced Robotics, in 2016, the Best Poster Award of the World Haptics Conference, in 2007 and 2013, and the Best Hands on Demo Award at the Euro-Haptics 2008 and the Haptics Symposium 2014.
Satoshi Tadokoro
Satoshi Tadokoro was an Associate Professor with Kobe University, from 1993 to 2005. He is currently a Professor with the Graduate School of Information Sciences, Tohoku University. Since 2014, he has been a Project Manager of the ImPACT Project of the Japanese Government. He was the Project Leader of the MEXT DDT Project on rescue robotics, from 2002 to 2007, and developed Quince, a UGV for CBRNE disasters that were used in the Fukushima-Daiichi Nuclear Power Plant response, in 2011. He established RoboCup Rescue, in 1999, the IEEE Robotics and Automation Society (RAS) TC on Safety, Security, and Rescue Robotics, in 2001, and the International Rescue System Institute, in 2002. He was the President of the IEEE RAS, from 2016 to 2017.