

ABSTRACT
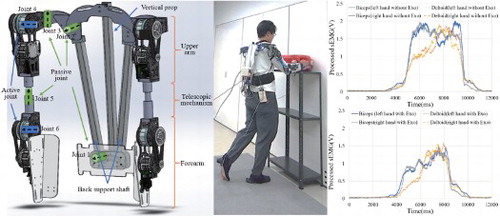
In this paper, a novel wearable lightweight exoskeleton with full degrees of freedom for upper-limb power assistance is developed. It is controlled by surface electromyography(sEMG) signals of the agonist muscle alone and aims to provide 30% power assistance to the elbow and shoulder joints for the flexion/extension movement. In the exoskeleton, there are two wearable identical arms and a back support pack. Each arm consists of two active joints and four passive joints, in which the active joints implement the power assistance for flexion/extension movement of the elbow and shoulder joints, whereas the passive joints fully follow the wearer's other motions. Moreover, with a rotatable and telescopic mechanism, the joint axis of the elbow joint of the exoskeleton can be adjusted to coincide with the elbow joint for different wearers, and meanwhile the passive joints of the shoulder complex of the exoskeleton can guarantee its instantaneous center of rotation to coincide with that of the wearer. As a result, the developed exoskeleton eliminates the restriction of motion and then the discomfort of the wearer. In addition, an extended admittance control is introduced and the effectiveness of the power assistance is verified.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Notes on contributors
Chang Liu
Chang Liu received the B.E. and M.E. degrees in system life engineering from Maebashi Institute of Technology, Gunma, Japan, in 2015 and 2017, respectively. He is currently working toward the Ph.D. degree in environmental and life engineering at Maebashi Institute of Technology, Maebashi, Gunma, Japan. His research interest includes the exoskeleton robotics, mobile robots, and power-assisted robots. Homepage: https://orcid.org/0000-0003-3629-3581
Hongbo Liang
Hongbo Liang received a Ph.D. degree in environmental and life engineering from Maebashi Institute of Technology, Maebashi, Gunma, Japan, in 2020. From 2017 to 2019, he was a research assistant with Maebashi Institute of Technology, Maebashi, Gunma, Japan. From 2019, he is a cooperative researcher with the Center for Regional Collaboration of Maebashi Institute of Technology, Maebashi, Gunma, Japan. His research interest includes the brain–machine interface, power augmentation technology, and rehabilitation robotic systems. Homepage: https://orcid.org/0000-0002-7720-4242
Yoshitaka Murata
Yoshitaka Murata received the B.E. degrees from the Department of Mechanical System Engineering from Gunma University, Gunma, Japan, in 2000. He had received teacher training for one year at Maebashi Institute of Technology, Gunma, Japan, in 2015. He is currently a teacher in Gunma Kenritsu Maebashikogyo High School, Gunma, Japan.
Peirang Li
Peirang Li received the B.E. and M.E. degrees in system life engineering from Maebashi Institute of Technology, Gunma, Japan, in 2018 and 2020, respectively. He is currently working toward the Ph.D. degree at Maebashi Institute of Technology. His research interests are robotics, mobile robots, and power assistive robots. Homepage: https://orcid.org/0000-0001-8584-6221
Naoya Ueda
Naoya Ueda received the B.S. and M.S. degrees in system life engineering from Maebashi Institute of Technology, Gunma, Japan, in 2019. From 2015 to 2017, he studied about the human's waist power assistance system by a waist exoskeleton based on the brain–machine-interface (BMI). Since 2018, he has studied about the usefulness of the mechanical redundancy of lower extremity exoskeletons (LEEs) for power assistance. His research interests include signal processing and applications for BMI using electroencephalogram (EEG), LEEs, and mechanical redundancy in robots and LEEs. Homepage: https://orcid.org/0000-0002-2445-538X
Ryuichi Matsuzawa
Ryuichi Matsuzava received the B.E. degrees in system life engineering from Maebashi Institute of Technology, Gunma, Japan, in 2020. He is currently working toward the M.E. degree in system life engineering at Maebashi Institute of Technology. His current research interest is in exoskeleton robotics.
Chi Zhu
Chi Zhu received the Ph.D. degree from The University of Tokyo, in 1999. He was a researcher with the National Institute for Resource and Environment and Yokohama National University, in 1999 and 2000, respectively. He was a Postdoctoral Associate with the Massachusetts Institute of Technology, in 2001. He has been a professor with the Maebashi Institute of Technology, Japan, since 2007. His research interests include humanoid robots, walking-assisted robots, and power-assisted robots. Homepage: https://www.maebashi-it.ac.jp/ zhu/e_index/e_index.html