

Abstract
The COVID-19 pandemic keeps spreading across the world and, while national governments concentrate on lockdowns and restrictions to mitigate the disaster, advanced technologies could be employed more widely to fight the pandemic. This paper surveys existing robotic solutions that could be employed for pandemic care and presents a systematized description of desired robot properties based on a particular application area and target users. We propose a new generation infection hospital framework that integrates existing robotic tools toward pandemic mitigation and discuss ethical aspects of their use within the framework.
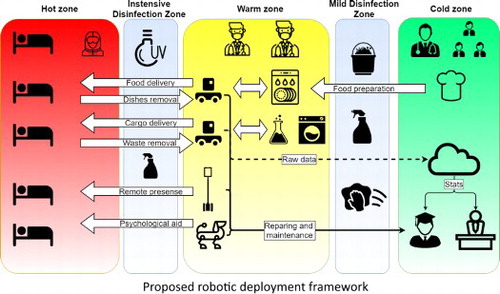
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Evgeni Magid
Evgeni Magid received his M.Sc. degree in applied mathematics in 2006 from the Israel Institute of Technology ‘Technion’, Israel, and a Ph.D. degree in robotics in 2011 from the University of Tsukuba, Japan. In 2011 he was a researcher with National Institute of Advanced Industrial Science and Technology (AIST) in Japan and from 2011 to 2012 he was a postdoctoral research fellow with the University of Tsukuba, Japan. In 2012 he was a postdoctoral research fellow with Robotics Institute at Carnegie Mellon University, USA. From 2013 to 2014 he was a research associate with the Bristol Robotics Laboratory at the University of Bristol, UK. From 2014 to 2016 he was a professor and a founder of the Institute of robotics and computer vision at the Innopolis University, Russian Federation. Currently he is a professor and a head of Intelligent Robotic Systems Laboratory (LIRS) with Kazan Federal University, Russian Federation. His research interests include mobile robotics, path planning, USAR, robotic teams, bipedal locomotion, human-robot interaction, and image processing.
Aufar Zakiev
Aufar Zakiev received his B.Sc. degree in applied informatics and M.Sc. degrees in computer science from Kazan Federal University, Kazan, Russian Federation, in 2017 and 2019, respectively. He is currently a research associate at Laboratory of Intelligent Robotic Systems (LIRS) of Kazan Federal University. His research interests include swarm robotics, machine vision and distributed communication systems.
Tatyana Tsoy
Tatyana Tsoy received her M.Sc. degree in international area studies in 2012 from University of Tsukuba, Japan. She is currently a research associate at Intelligent Robotic Systems Laboratory (LIRS) and a Ph.D. student in robotics with the Institute of Information Technologies and Intelligent Systems of Kazan Federal University, Russian Federation. Her research interests include computer vision and human-robot interaction.
Roman Lavrenov
Roman Lavrenov received his B.Sc. degree in system analysis and a Ph.D. degree in mathematical modeling and software from Kazan Federal University, Russian Federation, in 2013 and 2020, respectively. From 2012 to 2015 he worked as a robotics developer in Eidos Robotics. He is currently a Senior Lecturer at Kazan Federal University. His research interests include mobile and industrial robotics, machine vision, and robot operating system.
Albert Rizvanov
Albert Rizvanov, Ph.D. (USA), Dr.Sci. (Russian Federation), professor, Director of the Clinical Research Center for Precision and Regenerative medicine, Institute of Fundamental Medicine and Biology, Kazan Federal University, Russian Federation. Corresponding member of the Academy of Sciences of the Republic of Tatarstan, Honored Scientist of the Republic of Tatarstan and Honorary professor of Fundamental Medicine at the Faculty of Medicine and Health Sciences, University of Nottingham. He is an author of numerous peer-reviewed journal articles, book chapters and patents (Google Scholar h-index 31). Albert Rizvanov is the head of the biochemistry, microbiology, and genetics dissertation committee at KFU. He is the principal investigator of more than 50 grants supported by NATO, British Council, Royal Society (UK), Russian Science Foundation, Russian Foundation for Basic Research, industry contracts, etc. His fields of expertise include regenerative and precision medicine, gene and cell therapy (including rare diseases), molecular virology, cancer diagnostics and therapy.