

Abstract
This paper addresses the trajectory tracking control of an uncertain robotic manipulator in a networked environment. To avoid the frequent usage of communication and computational resources and to maintain a robust tracking performance of the manipulator, an event-triggered integral sliding mode controller is designed. The controller comprises of a proportional-derivative feedback control loop for the control of the unperturbed /nominal system. The integral sliding mode controller is introduced to guarantee robustness by enforcing the sliding motion from the initial time instant eliminating the reaching phase. Further, to reduce the network usage, a dynamic triggering mechanism is incorporated to reduce the number of control updates. The controller gains are redesigned in an event-based framework to ensure the stability of the system. The closed-loop system with the proposed event-based control law is shown to exhibit Zeno-free behaviour, i.e. the triggering mechanism executes finite sampling instances in finite time. Simulation results are illustrated to prove the theoretical contributions along with the comparative analysis.
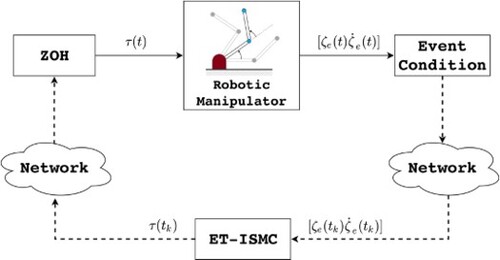
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Krishanu Nath
Krishanu Nath received the B.Tech. degree in electrical engineering from the North Eastern Regional Institute of Science and Technology, Arunachal Pradesh, India, in 2015 and the M.Tech. degree in control system engineering from the National Institute of Technology, Kurukshetra, India, in 2018. He is currently working toward the Ph.D. degree in control system with the Department of Electronics and Instrumentation Engineering, National Institute of Technology Silchar, Silchar, India. His research areas include event-triggered control, sliding-mode control, adaptive control, and learning-based control.
Manas Kumar Bera
Manas Kumar Bera received the B.E. degree in electronics and instrumentation engineering from the University of Burdwan, Bardhaman, India, in 2003, the M.E. degree in control system engineering from the Department of Electrical Engineering, Jadavpur University, Kolkata, India, in 2006, and the Ph.D. degree in systems and control engineering from the Indian Institute of Technology Bombay, Mumbai, India, in 2015. He is currently an Assistant Professor with the Department of Electronics and Instrumentation Engineering, National Institute of Technology Silchar, Silchar, India. His research interest includes the areas of sliding-mode control, higher order sliding mode, event-triggered control, and learning-based control and their application in robotics, biological systems, etc.