

ABSTRACT
In this paper, a robust controller has been proposed for first-order uncertain non-linear systems by introducing a novel hybrid sliding surface. Using this method, contrary to previous proposed sliding surfaces, the state trajectory begins moving on the correct sliding mode and the reaching phase can be reduced to the minimum time. Thus, the transient response speed of the system and consequently the efficiency and robustness of the system increase. Moreover, the convergence of the system state in bounded time, independent of the initial conditions of the system, is guaranteed without singularity problems. Then, for torque sensorless control of permanent-magnet DC motors, as one of the most prevalent joint actuators in robotics, an adaptive super-twisting controller, based on the proposed hybrid sliding surface, has been presented. Using this method, continuous finite-time control of the DC motor’s torque without a torque sensor is realized. The DC motor load-side torque is estimated based on an adaptive wavelet neural network and it is compensated in the control loop. In addition to the stability proof and fixed-time convergence of control schemes, a set of simulation and experimental studies have been provided to evaluate the efficiency of control algorithms and investigate their feasibility.
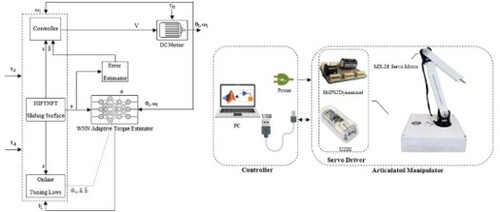
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Correction Statement
This article has been corrected with minor changes. These changes do not impact the academic content of the article.
Additional information
Notes on contributors
Mohammad Yazdani
Mohammad Yazdani received a BSc degree in robotics engineering from the Hamedan University of Technology, Iran. His MSc degree in Electrical Engineering has been completed at the university of Bu-Ali Sina in Hamedan, Iran, in 2021. His research interests include Artificial Intelligence, Non-linear Control, Robotics and IOT.
Soheil Ganjefar
Soheil Ganjefar was born in Iran in 1971. He received a BSc degree from the Ferdoowsi University, Mashhad, Iran, in 1994, and the MSc and PhD degrees from the Tarbiat Modares University, Tehran, Iran, in 1997 and 2003, respectively, both in electrical engineering. He is currently a Professor at the School of Electrical Engineering, Iran University of Science and Technology, Tehran, Iran. His main research interests include optimal control, neural network, singular perturbation, renewable energy and adaptive control.