

ABSTRACT
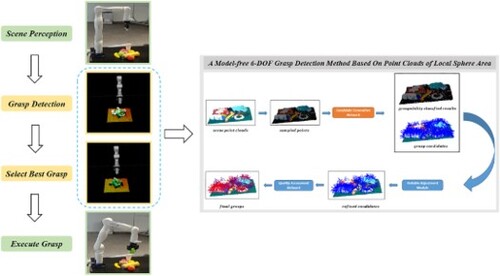
Grasping object is one of the basic tasks of robots in many scenarios. The main challenge is how to generate grasping poses for unknown objects in cluttered scenes. This paper proposes a model-free 6-DOF grasp detection framework based on single-view local point clouds. The whole process includes three stages: Candidate Generation Network(CGN), Reliable Adjustment Module(RAM), and Quality Assessment Network(QAN). CGN predicts the graspability and the initial grasp pose of the sampled points by the features extracted from the local sphere region based on the improved Pointnet. In order to better learn local area point clouds, we propose a progressive local region data learning mechanism, which can extract features from small to large scales efficiently. Candidate grasps are then consisting of graspable points and their grasping poses. RAM adjusts the position and width of the generated candidate grasps by using reliable heuristic rules. QAN uses a simpled-pointnet to evaluate the quality of the grasp candidates and filters out grasps with high confidence to execute. The proposed method not only achieves state-of-the-art results on GraspNet-1Billion but also shows high grasping success rates in real cluttered scenes.
GRAPHICAL ABSTRACT
KEYWORDS:
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Jingkang Sun
Jingkang Sun Graduate student. Department of Automation, Shanghai Jiao Tong University, Shanghai 200240, PR China.
Keqin Zhang
Keqin Zhang Deputy senior engineer. Robotics division, Ningbo Industrial Internet Institute, Zhejiang 315000, PR China.
Genke Yang
Genke Yang PhD Tutor. Department of Automation, Shanghai Jiao Tong University, Shanghai 200240, PR China.
Jian Chu
Jian Chu President. Ningbo Industrial Internet Institute, Zhejiang 315000, PR China.