

Abstract
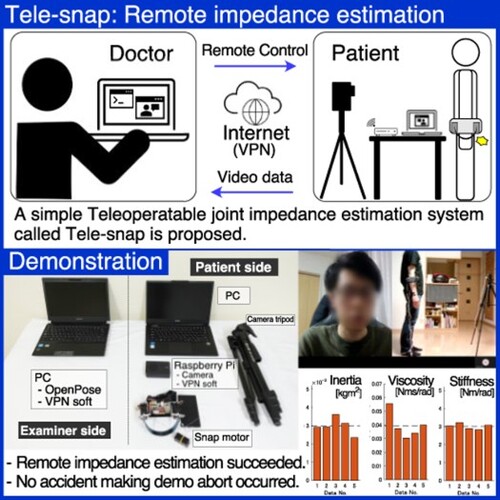
We propose a remote joint impedance estimation system called Tele-snap for a rehabilitation diagnosis under the COVID-19 pandemic. Dynamic resistance of the human joint is essential physical information reflecting the motor function. The resistance is assessed based on the touching sensation of the doctor (physiotherapist), but the pandemic restricts such an in-person manner. Our proposing system aims to provide this physical information quantified by the joint impedance for a diagnosis in the telerehabilitation context. The proposed system employs a compact impulsive perturbation generator called the snap motor and a marker-less motion capture technology called the OpenPose. The subsystem installed in the patient's place is then simplified remarkably, which consists of the wearable snap motor and Raspberry Pi with a built-in camera module. The proposed system can collect the dataset for impedance estimation through the examiner's teleoperation of the snap motor and camera via a virtual private network, with no need for the operation by the patient. We verify the proposed system through an in-person experiment and then demonstrate the remote impedance estimation scheme.
GRAPHICAL ABSTRACT
Acknowledgments
The authors would like to thank Professor Eiichi Tsuda of Hirosaki University and Mr. Toshiaki Tsukamoto of Hirosaki University Hospital for their valuable comments on our concept of remote rehabilitation diagnosis as medical experts.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Yuki Endo
Yuki Endo received a Bachelor of Engineering degree from Ibaraki University, Japan, in 2022. He is currently a Master’s student in the Graduate School of Science and Engineering at Ibaraki University. His current research interests include robotics and mechatronics.
Keisuke Yagi
Keisuke Yagi received the Ph.D. degree in Engineering from the Graduate School of Systems and Information Engineering, the University of Tsukuba, in 2016. After working with the University of Tsukuba as a Postdoctoral Fellow for two years, he joined Ibaraki University in 2018, as an Assistant Professor in the Domain of Mechanical Systems Engineering. His current research interests include control systems engineering, mechatronics and assistive robotics. He is a member of the IEEE, RSJ, and SICE.
Yoshikazu Mori
Yoshikazu Mori received the Ph.D. degree in information sciences from Tohoku University, Japan, in 1998. He is currently a professor of the Domain of Mechanical Systems Engineering, Ibaraki University, Hitachi, Japan. His research interests include robotics and mechatronics. He is particularly enthusiastic about producing practical devices. He is especially looking forward to greater development of rehabilitation robotics because he holds the qualification of care worker. He is also interested in autonomous agents such as companion robots.
Toshinobu Takei
Toshinobu Takei received the Dr. Engineering degree from the Graduate School of Systems and Information Engineering from the University of Tsukuba, Japan, in 2007. After working with the Ibaraki Prefectural Industrial Technology Center, the National Institute of Advanced Industrial Science and Technology, the University of Tsukuba and Seikei University, he joined Hirosaki University, Hirosaki, Japan, in October 2015, as an Assistant Professor in the Graduate School of Science and Technology. His general areas of interest are robot technology for practical application and his current research interests include haptics technologies. He is a member of the IEEE, RSJ and JSME.
Hiromi Mochiyama
Hiromi Mochiyama is currently a professor of the University of Tsukuba, Japan. He received the B.E. and M.E. degrees from Waseda University, Tokyo, Japan, in 1993 and 1995, respectively, both in electrical engineering, and the Doctoral degree in information science from the Japan Advanced Institute of Science and Technology (JAIST), Hokuriku, Japan, in 1998. After working with the Department of Information Science of JAIST, the Department of Mechanical System Engineering of National Defense Academy of Japan, and the Department of Mechanical Engineering of Nagoya Institute of Technology, Japan, he joined the Faculty of the University of Tsukuba in 2007 as an Associate Professor in the Department of Intelligent Interactive Technologies. Since then, he has directed the Flexible Robotics Laboratory. His research interests include system and control theory of soft robotics and haptics technology. From 2010 to 2011, he served as Deputy Director of the Bureau of Science, Technology and Innovation Policy, Cabinet Office, Japan. He served/is serving as the finance chair of ICRA2009, IROS2013, IROS2022, IFAC2023 etc., and the program chair of ARSO2021. He has been a senior editor of the IROS Conference Paper Review Board since 2018.