

Abstract
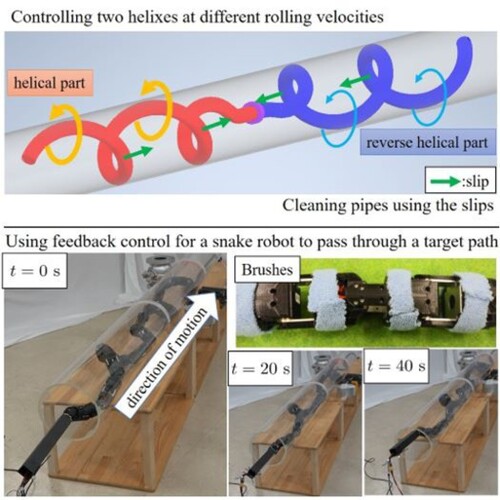
In this study, we present a method for moving a snake robot in a pipe while generating slips between the robot and the pipe wall. This method is intended to be applied to pipe cleaning. The structure of the robot consists of a helix and reverse helix connected by a passive roll joint, and the rolling velocities of the two helixes are controlled differently to generate slips. We designed the target paths to ensure that the robot could clean the entire pipe wall even if the brushes were attached while spaced out. A feedback control that adjusted the rolling velocities of the two helixes to follow the target path was introduced. The position of the snake robot can be controlled to move independently in and around the pipe axis. We verify the effectiveness of the method using simulations and experiments. We confirmed that by using feedback control, the robot could roll according to the target path, but only in the backward direction of the robot. We also confirmed that applying this method to cleaning the entire pipe wall is difficult because of the different errors of each brush.
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Haruki Tanihira
Haruki Tanihira received B.Eng. degrees in engineering from the Department of Mechanical Engineering and Intelligent Systems, the University of Electro-Communications, Tokyo, Japan, in 2022. He is currently the M.Eng. candidate in the Department of Mechanical and Intelligent Systems Engineering, University of Electro-Communications. His research interests include the development and control of snake robots.
Mizuki Nakajima
Mizuki Nakajima received B.Eng., M.Eng., and Ph.D. degrees in engineering from the Department of Mechanical and Intelligent Systems Engineering, the University of Electro-Communications in 2014, 2016, and 2020, respectively. He is currently an Assistant Professor at the Department of Robotics and Mechatronics, School of Science and Technology for Future Life, Tokyo Denki University. His research interests include the development and control of snake robots.
Motoyasu Tanaka
Motoyasu Tanaka received the B.Eng., M.Eng., and Ph.D. degrees in engineering from the Department of Mechanical Engineering and Intelligent Systems, University of Electro-Communications, Tokyo, Japan in 2005, 2007, and 2009, respectively. From 2009 to 2012, he was with Canon, Inc., Tokyo. He is currently a Professor with the Department of Mechanical and Intelligent Systems Engineering, University of Electro-Communications. His research interests include biologically inspired robotics and dynamics-based nonlinear control. He is a recipient of the IEEE Robotics and Automation Society Japan Chapter Young Award from the IEEE Robotics and Automation Society Japan Chapter in 2006 and the Best Poster Award at SWARM2015: The First International Symposium on Swarm Behavior and Bio-Inspired Robotics in 2015. He is a member of IEEE, the Robotics Society of Japan, and the Society of Instrument and Control Engineers.