

ABSTRACT
In a human–robot symbiotic society, it is crucial to have seamless communication between human and robot. However, there are still numerous obstacles to overcome to develop a interaction system that can flexibly interact in various situations. A practical approach to implementing interaction systems socially is to optimize interaction strategies by limiting and selecting tasks and situations. This research focused on the behavior of ‘apology,’ which is unique to humans and expected to be challenging for robots to replace. Effective interaction strategies were examined, with emphasis on the user's orientation toward the service and the essential elements for a robot to apologize. An apology process was implemented based on specific situations, capable of responding to both utilitarian and relational orientations, along with appropriate multimodal behavior control and speech expressions that consider the user's relationship with the robot. The system with these elements was evaluated for validity and effectiveness in the apology process.
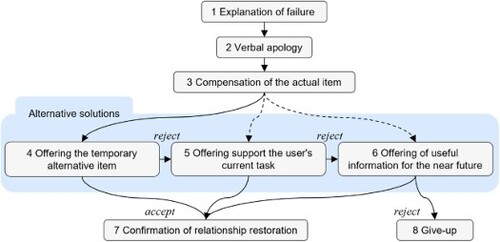
GRAPHICAL ABSTRACT
Acknowledgments
We would like to express our gratitude to Dr. T. Minato and the development team members at ATR for their invaluable support of the CGErica platform. Their expertise and dedication have greatly contributed to the success of this paper.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Notes
Additional information
Funding
Notes on contributors
Shun Oono
Shun Oono is a master's student at Tokyo Denki University. He served as the leader of Team YuruKuma in Dialogue System Live Competition 5. He achieved the Excellence Award (3rd Award). His main areas of research focus on human–robot interaction.
Hitoshi Ishii
Hitoshi Ishii is a master's student at Tokyo Denki University. He was a member of Team Yurukuma for Dialogue System Live Competition 5. He implemented facial expressions and movements on android robots and CG avatars and examined their effectiveness.
Ryoko Kihara
Ryoko Kihara graduated from Tokyo Polytechnic University in 2023 with a bachelor's degree in Information Technology Course in the Department of Engineering, Faculty of Engineering. She was a student member of Team Yurukuma, a joint team with Tokyo Denki University. She was engaged in research on dialogue systems using linguistic considerations.
Daisuke Katagami
Daisuke Katagami is a professor of the Faculty of Engineering in Tokyo Polytechnic University. He graduated from the doctoral course of Interdisciplinary Graduate School of Science and Engineering, Tokyo Institute of Technology in 2002. Since 2010, he has been working in Tokyo Polytechnic University. His major research interests are in human–agent interaction and artificial intelligence.
Masaki Shuzo
Masaki Shuzo obtained a Ph.D. degree in engineering from The University of Tokyo in 2003. Since October 2017, he has been working in Tokyo Denki University. His research interests include human–robot interaction and android science.
Eisaku Maeda
Eisaku Maeda received the MS degrees in zoology in 1984 and the PhD degree in mathematical engineering in 1993 from the University of Tokyo respectively. He joined NTT (Nippon Telegraph and Telephone Corp.) in 1986, and has been involved in a wide range of research fields including pattern recognition, machine learning, image recognition, natural language processing, and neuroscience. In 2017, he moved to the faculty of system design engineering at Tokyo Denki University as a professor, and has served as dean of the faculty since 2020.