
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Enhancing Canine–Human communication during training is an important research. We aim to strengthen the communication between canines and humans during the training of canine remote control using robotic technology. Training using rewards is a widely known technique to boost canine ability. So far, this method has consisted of giving rewards from humans, thus creating a strong connection between humans and canines; however, this method can also cause canines to become overly fixated on the people who feed them. Fixation prevents canines from performing behaviors away from people. For that reason, this study explores the possibility of using robotic technology to reduce canine fixation on their trainer. This paper evaluates dog behavior during training with reduced human intervention using a backpack-like device, which provides food as a reward. This method of training is assessed in two dogs by comparing the training time, number of feedings, and number of times the dog looks at nearby humans, as compared to the traditional method. The suit-mounted feeder was used to train the two dogs to follow a spot-light, achieving a success rate of 96.4% in feeding during training. There was no significant difference in training time or number of feedings required for training with this method compared to traditional human-rewarded training methods. On the other hand, it was suggested that the device could reduce the number of times the dogs looked at their trainer by up to 84.7%. Changes in gait caused by the suit and feeder were also evaluated based on the percentage of the swing phase of gait. The results indicate that the presence or absence of the feeder device does not affect the dog's gait. Continued canine training without fixation on the feeder or the trainer could allow the working dogs to demonstrate its abilities in remote areas.
GRAPHICAL ABSTRACT
1. Introduction
Enhancing Canine–Human communication during training is an important research topic. With this study, we aim to strengthen a specific form of communication: interaction during the remote-control training of canines by means of robotic technology. The authors studied the use of light stimuli to guide canine behavior [Citation1,Citation2], expand the range of canine behavior, or guide the dog in the right direction when it is far away from the handler. Light is emitted from a device mounted on the canine suit toward the ground, and the direction in which the light is emitted can be switched by a person using a joypad to achieve remote control. This research has made it possible to guide dogs along a specific path or to a particular destination within a distance of a few meters to a dozen meters.
Canine–Human communication during light-chasing training relies on the use of voice and gestures. When the canine performs the action that its handler commanded it to perform, the person praises the dog with an exaggerated voice or gesture at the right moment. By repeatedly praising the appropriate behavior when the command is sent, the canine learns that specific action. To reinforce the act of praise, food is used as a training reward. Training to reinforce the canine's ability through the use of food, combined with voice and gesture cues, is a technique commonly used in training working dogs [Citation3]. Conventional training methods of working dogs involve rewarding the canine with food directly from the hands of the handler or a feeder placed nearby. However, with this method, obsessive behaviors were observed when the dogs saw its handler or the feeding device, such as approaching the person or device in anticipation of a reward. This fixation is a major obstacle to canine remote-control using optical stimuli, as it leads the dog to act only within the visible range of its hander.
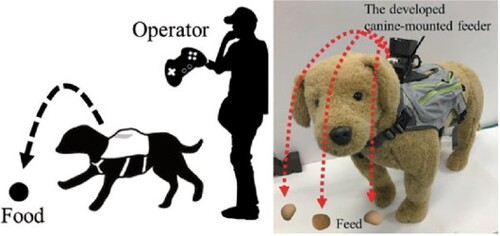
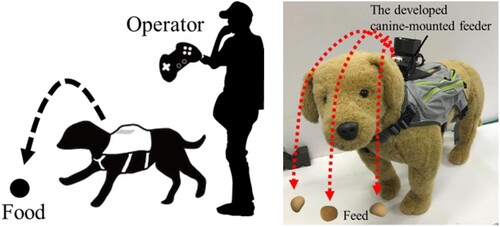
Thus, in this study, we developed a device that launches the training reward from the canine's back, with the aim of training the dog not to become fixated to the person or device providing the reward [Citation4,Citation5] (Figure ). By feeding food from its back, the source of the reward is rendered unrecognizable to the canine. This is expected to reduce the canine's fixation on the person during training and enhance and facilitate smoother the interaction. We were able to confirm, through testing on multiple dogs, that our canine-mounted feeders are capable of repeatedly supplying food with a high success rate [Citation6]. Efforts are underway to establish light-chasing training using these devices.
Figure 1. Canine suit-mounted feeder: It holds about 20 solid food pellets, which can be launched one at a time on command from a joypad. The direction of the launching can also be changed.
However, the impact of training methods that reduce human intervention and use a back-feeding device to provide rewards on canines remains unknown.
This paper examines the effects on canine behavior during training with reduced human intervention using a device that delivers the rewarded food from the canine's back. Our work on canine behavioral guidance training is used to verify the results. Two canines that have acquired the ability to chase light through the traditional hand-rewarded training are utilized for the evaluation. We validated the reward delivery method from the canine-mounted feeder by comparing the time required to train the dogs to complete ten laps, the number of food pellets, and the number of times they look at people nearby. In addition, we assessed the impact of the canine-mounted feeder on the dogs in training by comparing the percentage of swing phase in gait with and without the suit and feeder.
The main contributions of this paper are as follows.
A device that delivers reward food from the dog's back was used to verify the feasibility of canine training using light stimuli.
This device-based training was comparable to manually rewarded training regarding the number of food pellets and the time required for training.
We confirmed that the use of a device that launches rewards from the dog’s back reduces the number of times the animal looked at its handler by up to 84.7%, compared to manually rewarded training.
No significant difference was found between the dogs’ gait when wearing a suit with a feeder, and a simple suit with nothing on it.
2. Related works
Communication with the handler is essential in canine training. This includes praising the canine as soon as it performs an appropriate behavior in response to a given command. Through praise, the dog learns that the behavior is what the handler expects and becomes capable of performing said behavior [Citation7]. Some methods of praise include voice cues, playing with them using toys, and rewards such as food. Another common way to give rewards is the use of high-pitched sounds, such as a clicker sound. Repeatedly making the sound several times in conjunction with other rewards, such as play or food, can make the dog feel praised even with just the clicker sound [Citation8]. On the other hand, it has been reported that, when clicker sounds and feeding were used as rewards, the dog’s motivation to learn decreased if feeding was stopped in the middle of the training session [Citation9]. Therefore, direct rewards through voice, physical contact, or feeding are considered a more substantial reward than clicker sound in canine training. In this paper, clicker sounds and food are used as rewards for training. In particular, we propose canine training in which food rewards are given from a feeder mounted on the dog's back. By feeding the dog out of sight, we aim to reduce the level of fixation on the person or device providing the reward.
Devices exist to feed dogs in action [Citation10,Citation11], such as Furbo and Petlibro, which allow the handler to approach the dog, call out to it, and feed it while viewing camera footage on a cellphone. Remote training using such devices can cause the dog to become fixated to the area around the device. A few other methods have been developed to move along with the dog. For instance, a method of manipulating the dog by dangling its favorite object in front and changing its direction with a remote control has been developed [Citation12]. However, with this method, the dog gives up halfway through the action due to the inability to access the reward food. Since no reward is provided for the dog’s behavior, this method is not suitable for canine training. In this paper, methods such as Furbo and Petlibro, which allow rewards to be administered remotely with instructions from another device, are used in training.
3. Canine suit-mounted feeder
3.1. Overview of canine suit-mounted feeder
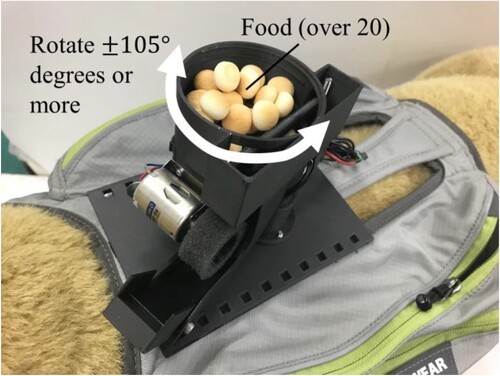
We utilized a canine suit-mounted feeder to provide food rewards from out of sight (Figures and ). This device positions the feeder on the back of the dog and launches food forward from that position. At a distance, the handler presses a button on a wireless joystick, which then rotates a drum inside the feeder and ejects food pellets one at a time. A sponge rotor located inside the feeder launches the food in front of the canine. The inside of the feeder can hold up to about 20 pieces of solid food. The suit-mounted feeder can also change the direction in which it launches food to the left or right. We are able to change this direction up to ±105 degrees using a servomotor to rotate the entire feeder in the yaw direction.
Figure 2. Internal mechanism of the canine suit-mounted feeder: it can change ±105 degrees.
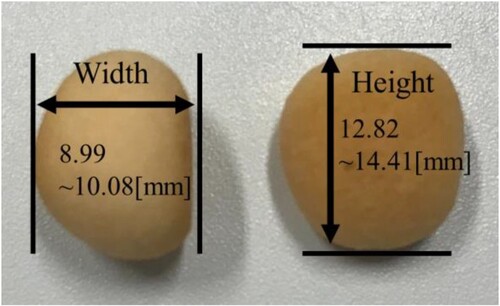
The food and internal structure of the canine suit-mounted feeder are described in the section below. We used the vegetable mix bolo shown in Figure as solid feed. We chose this because it is firm and easy to launch with the rotor mechanism, and because each food pellet has a low-calorie content, which means that it will not make the dog feel overly full, even after eating 20 pieces.
Figure 3. Solid food pellets’ shape and size.
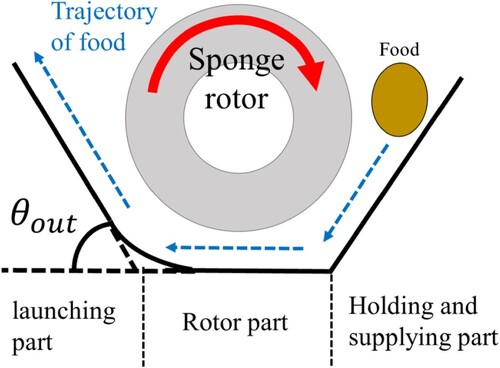
As the solid food varies in length and width, we employed a sponge-equipped rotor which can deform to hold and launch the food pellets (Figure ). The rotor-type mechanism consists of three parts: the pellet holding and supplying part, which keeps and launches the food; the rotor part, which accelerates and launches the food between the rotor and the wall; and the launching part, which determines the parabolic trajectory of the launched food pellets. The launching section has a set launching angle to 60° or more so that the food can be launched forward over the canine's head.
Figure 4. Launching mechanism using sponge rotor.
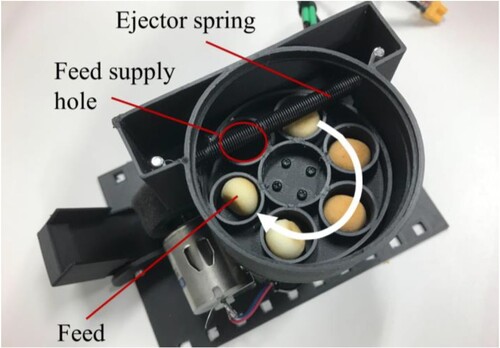
We utilized a rotating drum mechanism with a hole in it, as used in mess machines, in the pellet holding and supplying part, which is in charge of supplying multiple food pellets individually. Approximately 20 pellets enter the holes of the rotating drum under their own weight. The rotating drum then rotates and drops the food, one by one, through the holes in the discharge port, thereby supplying the food individually to the rotor section (Figure ). The top of the discharge port is blocked by a spring to prevent multiple pellets from being discharged at the same time, while also facilitating the entry of food pellets into the discharge drum.
Figure 5. Rotating drum mechanism that feeds one pellet at a time.
3.2. Success rate of continuous feeding to canines
All the experimental procedures were approved by the Ethics Committee of Tohoku University and Azabu University. We confirmed that three dogs (one Labrador Retriever and two Standard Poodles) could be fed continuously from the suit-mounted feeder. Since dogs are sensitive to sounds and foods, we accustomed them to the sound of the feeder, and the food being launched from it. Initially, we placed the suit-mounted feeder on the ground and launched the food. This helped the dogs get familiar with it. After that, the suit-mounted feeder was fixated to the dog. Training was not started immediately. We let the dogs walk around for a bit with the suit on, allowing them to get comfortable. Once they were used to wearing the suit, food pellets were launched. At the handler's discretion, one dog was fed in a prone position, and two dogs were fed in a stationary standing position.
The results are shown in Table . They indicate that the suit-mounted feeder was sufficient to provide food rewards during training, as it was able to feed the three sound-accustomed canines 53 out of 57 times, with a success rate of approximately 93%.
Table 1. Success rate of continuous feeding to canines.
The experiments in Chapter 4 will use two of the standard poodles for evaluation.
4. Evaluation
4.1. Evaluation of the effects on canine training using a suit-mounted feeder
We tested the feasibility of this training method using two standard poodles (Dog1, Dog2), inducing behavior by light stimulation while wearing the canine-mounted feeding device. To assess how well a suit-mounted feeder works for guiding behavior with light, it's important that the dogs are already familiar with following light cues. So, we worked with two dogs that had previously been trained in responding to light signals and had experience with being fed from a suit-mounted feeder. Both of these dogs were born to the same parents, were of the same age (8 years), and had a similar body size (Both Dog1 and Dog2’s leg length is 40 cm. Similarly, Dog1’s body length is 60 cm, and Dog2’s body length is 66 cm.). Additionally, Dog1 was a female, and Dog2 was a male.
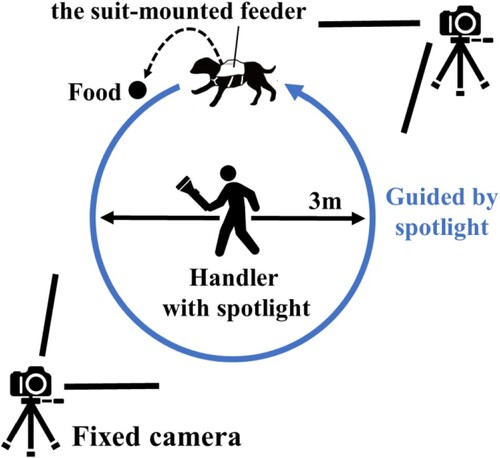
Canine training for behavioral guidance using a suit-mounted feeding device is shown in Figure . We used a circular trajectory centered on the handler to conduct the training indoors, which had the handler standing at the center of a 3 m diameter circle. The handler directed the dog in the desired direction by issuing a voice command to follow the light, while shining a handheld spotlight on the floor in front of the dog. If the dog followed the light for a specific time according to the given command, the handler considered it a success, sounded a clicker, and provided a food reward manually. We used a combination of clicker sounds, which enabled the dog to understand that it was being rewarded in synchrony with the movement or action it performed. These command and reward actions were repeated until the canine had completed 10 laps of a circle track. Four sets of 10 laps counted as one set.
Figure 6. Light-guided training using the suit-mounted feeder.
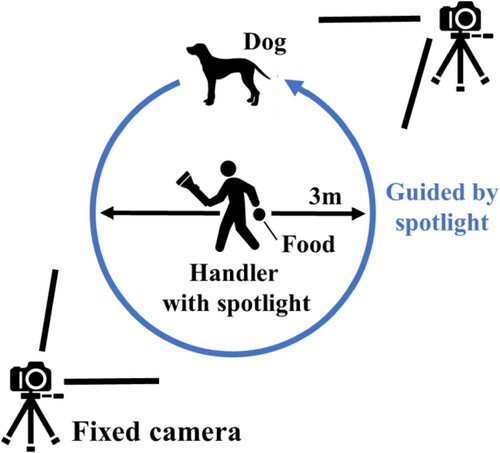
For comparison, training was conducted with food rewards given manually by the handler (Figure ). The difference from the training wearing the suit-mounted feeder lies on how the rewarded food was provided. The handler, located in the center, guided the dog with voice commands and light and, upon success, a clicker sound and food were given. Light was shone on the ground in a 3 m diameter circle to guide the canine around to complete 10 laps. Four sets of 10 laps were done.
Figure 7. Light-guided training in which a handler directly provides the reward.
The dog's movements during both training sessions were recorded with two cameras fixed in the surrounding environment, and one handycam camcorder. From the footage, we were able to measure the number of food pellets required for ten laps, the time taken to complete the laps, and the number of times the canine took a glance at the handler during the training. We excluded the time it took the dogs to eat the food from our time measures. The time spent eating was defined as the time between the clicker sound, which is the cue to feed, and the time when the light was shone on the ground to guide the dog by issuing a vocal command. Thus, the time taken to complete a lap and the number of times the dog looked at the handler were counted during light-guided training.
4.2. Evaluation of the effects on canine walking wearing a suit-mounted feeder
The impact of the suit-mounted feeding device on dog gait was evaluated by comparing the percentage of gait swing phase of two dogs when the suit-mounted feeder was worn and not worn (Figure ). Wearing a suit has the potential to affect a dog’s behavior. To test this possibility, we compared dog gait under three conditions: without a suit (No suit), with a suit (Suit), and with the suit-mounted feeder (Suit with feeder) using a t-test. We wanted to analyze the effect of the suit and the effect of the feeder separately. Therefore, we decided to conduct the t-test independently.
Figure 8. Measurement of the dogs’ gait.
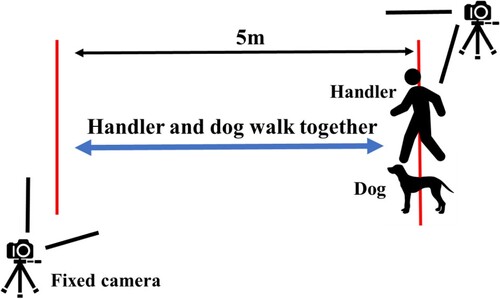
The handler moved with the food slightly in front of the dog, walking the dog along a 5 m straight line. This exercise was performed for ten sets. The distance was set to measure the dog's gait for approximately five cycles based on the dog's legs and body length. The dog's movements while walking were recorded with two cameras fixed in the environment and one handycam. From the recorded video footage, we calculated the number of steps, time taken, and percentage of the swing phase of gait in the five-period gait for three conditions: without the suit, with the suit, and with the suit-mounted feeder.
5. Experimental results
5.1. Effects on canine training using a suit-mounted feeder
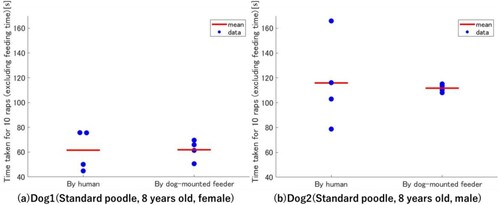
Figures and show the overall time taken to complete 10 laps and the time taken to finish the training, respectively, excluding the time it took the dogs to eat the food. Eating food after feeding took about 40% of the training time for Dog1 and approximately 30% for Dog2. Excluding the time spent eating food, the average training time for Dog1 was 61.57s during manual feeding and 61.89s during device feeding; for Dog2, 115.93s during manual feeding and 111.73s during device feeding. There was not a big difference between Dog1 and Dog2 when using manual feeding and device feeding. Figure shows that the standard deviation of training time was shorter for the suit-mounted feeder (Dog1: 7.13 s, Dog2: 2.63 s) compared to the hand-rewarded condition (Dog1: 14.21 s, Dog2: 31.79 s).
Figure 9. Total time taken to complete 10 laps.
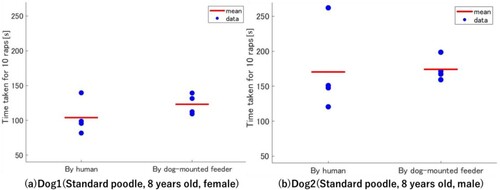
Figure 10. Time taken to complete 10 laps (excluding feeding time).
Furthermore, Figure shows the number of foods pellets needed to complete 10 laps. On average, Dog1 received 8.75 food pellets through manual feeding, and 11.50 through device feeding. Similarly, Dog2 received 10.50 food pellets through manual feeding and 9.5 pellets through device feeding. In conclusion, there was a difference of 1–2 food pellets between the two dogs, which is not significant.
Figure 11. Number of food pellets required.
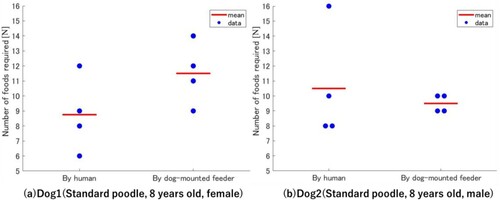
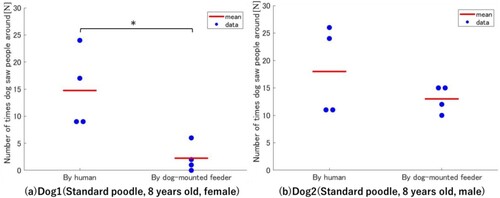
Figure shows the number of times the animals looked around during training. Dog1 looked at the people around her during training 14.75 times during manual feeding and 2.25 times during device feeding. Dog2 looked at people 18.00 times in manual feeding and 13.00 times during the device feeding. The use of the suit-mounted feeder decreased the number of times the dogs looked at their human handlers by 84.7% for Dog1 and 27.8% for Dog2. T-test aimed at identifying significant differences in the reduction in the number of times each dog looked at a person revealed a considerable difference of p = 0.017 < 0.05 for Dog1. On the other hand, no significant difference was confirmed for Dog2 with p = 0.28 > 0.05.
Figure 12. Number of times the dogs looked at people around: * P-value is less than 0.05.
5.2. Effects on canine walking wearing a suit with feeder
Figures and disclose the number of steps and time it took to complete the training for the two dogs in the conditions of no suit, wearing a simple suit (suit), and wearing a suit with feeding device (suit with feeder). Dog1 walked straight all 10 times, while Dog2 was unable to walk straight two times out of 10. All of this data was used for the analysis in this study.
Figure 13. Number of steps to complete a 5 m lap.
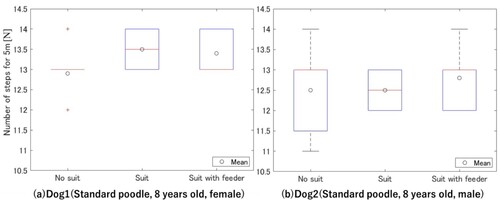
Figure 14. Time taken to complete a 5 m lap: *** P-value is less than 0.001.
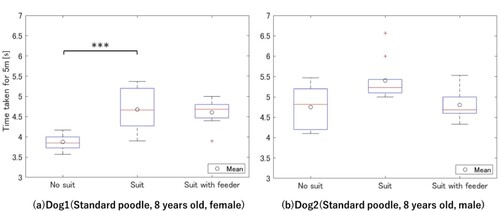
The average number of steps is shown in Figure . No significant differences were observed in the step count between Dog1 and Dog2 across all conditions. The average walking time is illustrated in Figure . Dog1’s walking time was shorter during the no suit condition than both the suit and suit with feeder (a significant difference was observed between no suit and suit conditions for Dog1’s walking time, with a p = 0.026e-2 < 0.001). On the other hand, there was not a significant difference in the walking time while wearing the suit and suit with feeder for both Dog1 and Dog2.
Figure shows the percentage of the swing phase of gait during the no suit, suit, and suit with feeder conditions. For both Dog1 and Dog2, the percentage of the swing phase decreased during the suit condition compared to the no suit condition. Table shows the T-test results. In particular, the left and right foreleg’s swing phase of Dog2 showed significant differences (p = 0.020e-1 < 0.01 for the left and p = 0.026e-1 < 0.01 for the right) between the no suit and suit condition. These results indicated that wearing the suit increased the time the dog’s legs were on the ground, thus confirming that wearing the suit has an effect on canine walking gait. Conversely, we were unable to confirm that there was a significant difference in the percentage of the swing phase time between wearing the simple suit and wearing the suit with feeder for both dogs. In the case of Dog 1, the left front leg was p = 0.057 > 0.05, the right front leg was p = 0.031 < 0.05, the left rear leg was p = 0.087 > 0.05, and the right rear leg was p = 0.066 > 0.05 between the wearing of the suit and the suit with feeder. No significant difference was found between the three legs (left front, left rear, and right rear).
Figure 15. Percentage of the swing phase of gait in five cycles of walking.
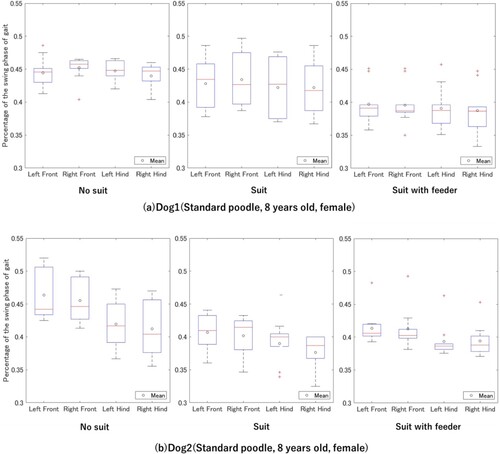
Table 2. T-test comparison of the percentage of floating period for each leg: * P-value is less than 0.05, ** P-value is less than 0.001.
6. Discussion
There was no significant difference between the canine suit-mounted feeding device and the manual rewards for both canines in terms of the average time taken to complete 10 laps with the light, and the average number of food pellets required. On the other hand, the number of times the dogs looked at their surroundings was 84.7% less for Dog1 and 27.8% less for Dog2 when using the suit-mounted feeding device than when rewarded manually. Testing for significant differences in the reduction in the number of times each canine took a glance to their handler confirmed a considerable difference with p = 0.017 < 0.05 for Dog1; however, no significant difference was found for Dog2 with p = 0.28 > 0.05. The few times the dogs looked at the people around them during training suggests that they were focused on the training. Thus, rewards from suit-mounted feeding devices may be suitable for training canines at a distance. In the future, we will conduct similar experiments with a larger number of canines, and conduct training in situations where dogs remain removed from people to verify these results.
We focused our analysis on the variation of the time taken to complete the training. This result suggests that the dogs may have been able to concentrate on the training much better when receiving rewards from the suit-mounted feeder, as they did not have the distraction of people around them.
Additionally, we investigated the suit's effect on gait based on the percentage of the gait period during which the canines were in swing phase. This assessment revealed that wearing the suit indeed affected their gait, as both Dog1 and Dog2 had shorter gait periods when wearing the suit. On the other hand, there was no notable change in the percentage of the gait's free-leg period when the canines were equipped with the feeder. This suggests that canines already familiar with the dog suit could be trained to wear the suit-type feeder. Meanwhile, gait alone does not tell us whether the canines feel discomfort in wearing the feeding device. it is necessary to conduct further studies using biological indicators, such as cortisol measurements, in the future.
7. Conclusion
This paper described the analysis of the effects of a device that provides reward food from a dog’s back on canine behavior during training with reduced human intervention. Two dogs were used to verify whether the suit-mounted feeding device could be adapted for canine behavior training using light stimuli. We compared the results of reward training using a suit-mounted feeder located at the back of the canines, and manual reward training, including the time required to complete 10 laps, the number of food pellets, and the number of times the dogs looked at the people around them. Similarly, the effect of the suit-mounted feeding device on the two canines during training was evaluated by comparing the percentage of the swing phase of the gait while wearing the suit-mounted feeder, without the suit, and without the feeder.
The results confirmed that dog training using light stimulation is possible in conjunction with a device that delivers reward food from the canine's back. It was also confirmed that the amount of food and time required for training while wearing the feeding device were comparable to those of training with human rewards. On the other hand, we discovered that the use of a device that provides reward food pellets from the dogs’ back reduced the number of times they looked at their handlers by up to 84.7% compared to training in which the reward was given manually. Finally, we were able to confirm that there is no significant difference in the gait swing phase of the canines while they are wearing a simple suit, and the suit with the feeder.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Shoichi Nezu
Shoichi Nezu received BS and MS from Tohoku University in 2022 and 2024. He studied the use of light to guide canines and the development of canine-mounted feeders for long-distance behavioral guidance.
Kazunori Ohno
Kazunori Ohno received BS, MS, and PhD from Tsukuba University in 1999, 2001, and 2004. He has been an assistant professor, lecturer, associate professor at Tohoku University, and now professor of New Industry Creation Hatchery Center (NICHe) Tohoku University since 2021. He also serves as chair of Data Engineering Robotics and head of the Physical Division of the Tough Cyber-physical AI Research Center. His research fields are field robotics, robot intelligence, and cyber-enhanced canines.
Shotaro Kojima
Shotaro Kojima is currently an assistant professor at the Tough Cyber Physical AI Research Center (TCPAI) of Tohoku University. He received his PhD and MSc in Information Sciences from Tohoku University in 2021 and 2017, respectively. He received his BSc in Mechanical Engineering from Tohoku University in 2015. His research interests are robot navigation systems and disaster responding robots. A member of RSJ, JSME and IEEE.
Ranulfo Bezerra
Ranulfo Bezerra is an Assistant Professor in the Tough Cyberphysical AI Research Center at Tohoku University in Sendai, Japan. He received his PhD degree in Information Sciences from Tohoku University, Japan, in 2021. He obtained his MSc and BSc degrees in computer science from the Federal University of Piaui, Brazil, in 2018 and 2016, respectively. His research interests include robot intelligence, robotic perception, and multi-robot systems. He is a member of RSJ and IEEE.
Miho Nagasawa
Miho Nagasawa is an Associate Professor at the Department of Animal Science and Biotechnology, School of Veterinary Medicine, Azabu University. She received a PhD degree in 2008 from Azabu University for human-animal relationship. She is interested in the physiological basis of social interactions in humans and dogs, and the effects of dogs on human health and society.
Takufumi Kikusui
Takefumi Kikusui is a Professor at the Department of Animal Science and Biotechnology, School of Veterinary Medicine, Azabu University. He received a PhD degree in 1999 from The University of Tokyo in Veterinary Medicine. He is interested in the neuro-emotional basis of social interactions in humans and dogs, and the effects of dogs on human health and society.
Satoshi Tadokoro
Satoshi Tadokoro graduated from the University of Tokyo in 1984. He was an associate professor in Kobe University in 1993–2005, and is a professor of Tohoku University since 2005, and was a vice/deputy dean in 2012–2014, and is the director of Tough Cyberphysical AI Research Center since 2019. He is the president of International Rescue System Institute since 2002 and was the IEEE RAS President in 2016–2017. He served as a program manager of MEXT DDT Project on rescue robotics in 2002–2007, and was a project manager of Japan Cabinet Office ImPACT Project on disaster robotics in 2014–2019 having 62 international PIs. His team developed various rescue robots, two of which called Quince and Active Scope Camera are well-known because they were used in disasters such as in nuclear reactor buildings of the Fukushima–Daiichi Nuclear Power Plant Accident. IEEE Fellow, RSJ Fellow, JSME Fellow, and SICE Fellow.
References
- Ohno K, Yamaguchi S, Nishinoma H, et al. Control of canine’s moving direction by using on-suit laser beams. 2018 IEEE International Conference on Cyborg and Bionic Systems, Shenzhen; 2018. p.59–64. doi:10.1109/CBS.2018.8612258
- Nishinoma H, Ohno K, Kikusui T, et al. Canine motion control using bright spotlight devices mounted on a suit. IEEE Trans Med Robot Bionics. 2019;1(3):189–198. doi:10.1109/TMRB.2019.2930343
- Rooney NJ, Cowan S. Training methods and owner–dog interactions: links with dog behaviour and learning ability. Appl Anim Behav Sci. 2011;132(3–4):169–177. doi:10.1016/j.applanim.2011.03.007
- Nezu S, Ohno K, et al. Development of a suit-mounted feeder that rewards canines during activity. ROBOMECH2022, 2A1-I11, 2022.
- Nezu S, Ohno K, et al. Development of a canine-mounted feeder capable of feeding many foods in different directions. SICE SI2022, 3P2-F06, 2022.
- Nezu S, Ohno K, et al. Trial of a method of rewarding dogs during remote activity with a dog-mounted feeder. ROBOMECH2023, 2A2-G09, 2023.
- Bradshaw J. Dog sense: how the new science of dog behavior can make you a better friend to your pet. Basic Books; 2011. p. 95–98.
- Bradshaw J. Dog sense: how the new science of dog behavior can make you a better friend to your pet. Basic Books; 2011. p. 108–110.
- Cimarelli G, Schoesswender J, Vitiello R, et al. Partial rewarding during clicker training does not improve naïve dogs’ learning speed and induces a pessimistic-like affective state. Anim Cogn. 2021;24(5):107–119. doi:10.1007/s10071-020-01425-9
- FURBO. FURBO pet camera; [cited 2023 Oct 5]. Available from: https://furbo.com/jp.
- PETLIBRO. Automatic feeder; [cited 2023 Oct 5]. Available from: https://petlibro.com/collections/automatic-pet-feeder.
- Osman W. Biohacking a dog; [cited 2023 Aug 27]. Available from: http://www.williamosman.com/2017/01/biohacking-dog.html.