

Abstract
This research proposes a method for accurate all-round 3D reconstruction of an indoor environment in one-shot using a system of trinocular 360-degree cameras. Binocular 360-degree stereo is unable to reconstruct in all directions due to lack of disparity along epipolar directions. Thus, a third camera along a perpendicular epipolar direction is introduced to cover for this, making the system trinocular. However, previous works with trinocular stereo did not adequately take into account the uncertainty of disparity estimation and geometric constraints around 3D reconstruction. Therefore, we propose a geometric optimization scheme considering disparity estimation uncertainty and show that this results in both higher accuracy and lesser outliers along epipolar directions, in both simulated and real environments.
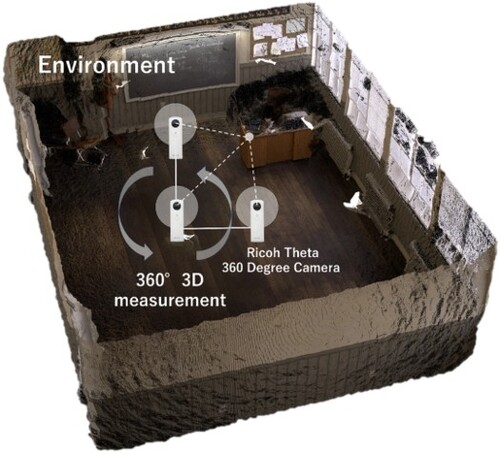
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Sarthak Pathak
Sarthak Pathak received his B.Tech., and M.Tech. degrees in the Department of Engineering Design, Indian Institute of Technology Madras, India, in 2014. He received his Ph.D. in the Department of Precision Engineering, the University of Tokyo, Japan, in 2017. After working as a Postdoctoral Research Fellow and Project Assistant Professor at the same, he is currently an Assistant Professor in the Department of Precision Mechanics at Chuo University in Tokyo, Japan. His research interests are robot vision, specifically, localization and 3D reconstruction, especially using 360-degree cameras.
Takumi Hamada
Takumi Hamada received his B.Eng., and M.Eng., degrees from the Department of Precision Mechanics at Chuo University in 2021 and 2023, respectively. He is currently employed as an engineer at Nissan Motor Corporation, Kanagawa, Japan. His research interests include 3D reconstruction using 360-degree cameras.
Kazunori Umeda
Kazunori Umeda received B.Eng., M.Eng., and Ph.D. degrees in Precision Machinery Engineering from the University of Tokyo, Japan, in 1989, 1991, and 1994, respectively. He became a Lecturer of Precision Mechanics at Chuo University, Japan in 1994, and is currently a Professor since 2006. He was a visiting worker at the National Research Council of Canada from 2003 to 2004. His research interests include robot vision, 3D vision, and human interface using vision. He is a member of RSJ, IEEE, JSPE, JSME,SICE, IEICE, etc.