

Abstract
In a diverse society, a crucial aspect of developing social robots is their ability to adapt to each individual's characteristics. There are two types of adaptation: physical and social. In pHRI, attention is paid to physical adaptation, but by investigating the social meaning of physical adaptation, we can extend it to social adaptation. Although it is a physical interaction, a handshake is a social action with complex meanings. We realized a handshaking robot with a Rowat-Selverston CPG controller that can synchronize with human movements. This study aims to clarify the relationship between physical and social adaptation by examining individual characteristics inferred from the internal state of the robot and human-robotic social attributes. Our finding is that there is a correlation between the internal state of the robot and some robotic social attributes. It was also found that the length of the handshake had little effect on these social perceptions. This study highlights the complex interplay between robot physical adaptability and social attribution, providing a foundation for developing robots capable of personalized and socially meaningful interactions.
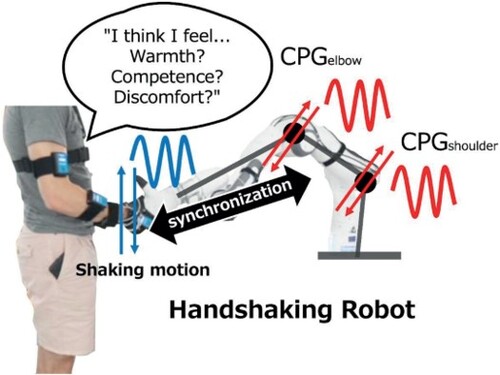
GRAPHICAL ABSTRACT
Acknowledgments
We would like to sincerely thank Adrien Guénard, an engineer at LORIA, for his invaluable support and technical insights.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Notes
1 Check here to view videos of the experiments. https://youtu.be/JNoT3C5zzJ4
Additional information
Funding
Notes on contributors
Kakeru Yamasaki
Kakeru Yamasaki received his B.Eng. in Information Engineering from the School of Computer Science and Systems Engineering at Kyushu Institute of Technology, Fukuoka, Japan. He then earned his M.Eng. in Information Engineering from the Graduate School of Life Science and Systems Engineering at Kyushu Institute of Technology. He is currently a Ph.D. student at the Graduate School of Life Science and Systems Engineering. Since 2022, he has also been a Kyutech Research Fellow at the Kyushu Institute of Technology. His research interests include assistive robotics and human-robot interaction. He is a member of the IEEE, Robotics Society of Japan (RSJ), Virtual Reality Society of Japan (VRSJ), and Information Processing Society of Japan (IPSJ). In 2021, he founded the student organization ‘Rapid Creation Section,’ which aims to implement welfare technologies in society and served as its president in 2021 and 2022. He received the Kyushu Institute of Technology Social Contribution Award in 2021 and 2022.
Tomohiro Shibata
Tomohiro Shibata received Ph.D. from the University of Tokyo, Japan, in 1996, continued his robotics study as a JSPS (Japan Society for the Promotion of Sciences) researcher, and then worked on computational neuroscience research using a humanoid robot at ATR (Advanced Telecommunication Research Institute) as a JST (Japan Science and Technology) researcher. After working as an associate professor at Nara Institute of Science and Technology in robotics, computational neuroscience, and assisted living, he currently works as a professor at Kyushu Institute of Technology, Kitakyushu, Japan. He also organizes the Smart Life Care Co-Creation Laboratory, which the Ministry of Health, Labor and Welfare use for a project to develop, demonstrate, and promote nursing care robots. He received a young investigator award from the Robotics Society of Japan (1992), the Best Paper Award from the Japanese Neural Network Society (2002 and 2015), the Neuroscience Research Excellent Paper Award from the Japan Neuroscience Society (2007), the Best Application Paper Award of IROS 2015 (2015), Excellent Paper Award from the RSJ (2020), Best Presentation Award of ICIEV and icIVPR (2021), the Winner in the Healthcare Category of Garmin Healthcare Awards (2022), and others. He was an editorial board member of Neural Networks and an executive board member of the Robotics Society of Japan (RSJ). He is currently an executive board member of the Japanese Neural Network Society (JNNS), a fellow of the RSJ, a member of the International Exchange Committee of the RSJ, and the head of the special interest group on ‘Nursing Care Robots’ of the RSJ. He is also a member of IEEE, a governing council member of The Robotics Society (of India), a member of JSME, and the Society for Nursing Science and Engineering.
Patrick Hénaff
Patrick Hénaff is Professor since September 2013. He obtained a MSc in robotics in 1989 and a PhD in robotics in 1994 from the Robotic laboratory of Paris, Université Pierre et Marie Curie (France). From 1997 to 2013, he was associate Professor at the Technical Institute of the University of Cergy-Pontoise. From 1997 to 2009, he worked as a researcher at the LISV (Systems Engineering Laboratory at the University of Versailles) and from 2009 to August 2013, he was a researcher at the ETIS laboratory at the University of Cergy-Pontoise, CNRS UMR 8051. From September 2013 to September 2023, he was Professor at the Ecole des Mines de Nancy , University of Lorraine, and in the LORIA laboratory, Neurorhythms team. He was head of the Complex Systems, Artificial Intelligence and Robotics department at LORIA from 2015 to 2022 and head of the Computer Science department at Mines Nancy from 2018 to 2023. Since October 2023, he is professor at the École Nationale d'Ingénieurs de Brest (France) and researcher at the Lab-STICC Laboratory, Interaction department. His research focuses on bio-inspired control in robotics. They aim to gain a better understanding of the learning mechanisms involved in motor coordination in humans, in order to model them and integrate them into humanoid robot controllers so as to give the latter sensorimotor coordination learning capabilities. In particular, it is developing computational models of adaptive neural networks dedicated to controlling the rhythmic movements of humanoid robots.