
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
We consider a generalization of standard vector optimization which is called vector optimization with variable ordering structures. The problem class under consideration is characterized by a point-dependent proper cone-valued mapping: here, the concept of K-convexity of the incorporated mapping plays an important role. We present and discuss several properties of this class such as the cone of separations and the minimal variable K-convexification. The latter one refers to a general approach for generating a variable ordering mapping for which a given mapping is K-convex. Finally, this approach is applied to a particular case.
1. Introduction
In this paper, we present some properties of a K-convex mapping in variable ordering settings, that is, a vector mapping such that
(1)
(1) for all
and all
, where C is a convex set and
is a proper cone-valued mapping. This class of mappings arises in vector optimization with a variable ordering structure, given as
(2)
(2) which consists in finding a point
such that
for all
(see [Citation1]). We refer to Definition 2.3, where a proper cone-valued mapping, or synonymously variable ordering cone mapping, is defined. The K-convexity of a mapping has been extensively studied in standard vector optimization, in particular, in the context of convergence results for numerical solution methods [Citation2–5]. The K-convexity of F in (Equation2
(2)
(2) ) allows to give a sufficient first-order optimality condition [Citation1]. Furthermore, for the (generalized) concept of vector optimization with variable ordering structures, recent results on the convergence of solution methods can be found in [Citation1,Citation6]. We also mention [Citation7], where a variable ordering setting for set-valued optimization was introduced and studied.
Several applications of Problem (Equation2(2)
(2) ) arise, e.g. in medical diagnosis and portfolio optimization [Citation8,Citation9]; for a summary of these applications, we refer to [Citation10, Section 1.3.1]. We briefly expose here an application in medical diagnosis. After obtaining information from images, the data are transformed into another presentation and, based on that, the diagnosis is made. In order to determine the best transformation from the original data to the desired pattern, different criteria for measuring can be used which lead to the optimization of a vector of functions. It is well known that the solution of that model, which uses a classical weighting technique, may yield inadequate results. However, if the set of weights is point-dependent, then better results are reported [Citation10].
The goal of this paper is twofold. Firstly, we define the so-called cone of separations and relate its properties to K-convexity; in particular, under certain assumptions, the set of K-convex mappings is reduced to the class of affine functions. Secondly, we introduce a particular cone-valued mapping that provides a theoretical approach for obtaining K-convex mappings. This particular mapping is called minimal variable K-convexification. We study several of its properties, for example, the Lipschitz continuity of related cone generator mappings.
This paper is organized as follows. Section 2 contains basic notation and definitions as well as some preliminary results. Section 3 presents the concept of the cone of separations. Section 4 discusses the main results of this paper: a special cone-valued mapping, the minimal variable K-convexification, is defined and corresponding properties are shown. In Section 5, this approach is applied to a particular case, and Section 6 gives some conclusions.
2. Notations and preliminary results
Throughout this paper, we will use the following standard notations. The inner product in is denoted by
and the Euclidian norm by
. The ball and the sphere centred at
with radius r>0 are
and
, respectively. The set
represents the set of k-times continuously differentiable mappings
with derivative
and Hessian
at a point
. For a set
, let
,
,
and
denote the set of its interior points, its convex hull, its boundary and its closure, respectively.
The following definition recalls some well-known notations related to cones (see, e.g. [Citation11]).
Definition 2.1
A non-empty set
is called a cone if
A cone K is called solid if
A cone K is called pointed if
A cone K is called proper if it is solid, pointed and a convex closed set.
The dual cone
Let
A set A is called a generator of a cone K if
It is well known that a proper cone in defines a partial ordering in
(see, e.g. [Citation11, p. 43]). The following lemma summarizes some known results on cones.
Lemma 2.1
A convex closed cone
A cone
Let
Proof.
For the proof of (i), (ii) and (iii), see [Citation11, Subsection 2.6.1], [Citation12, Subsection 2.7.2] and [Citation13, Theorem 3.22], respectively.
In the following, we will sometimes consider a set-valued mapping and its graph
The next definition recalls two well-known concepts [Citation14,Citation15].
Definition 2.2
Let two nonempty sets
A set-valued mapping
As mentioned above, in this paper, we are interested in variable ordering cone mappings, which are a particular class of set-valued mappings and whose definition is recalled in the following, see [Citation1,Citation10].
Definition 2.3
Let a convex set , a set-valued mapping
and a mapping
be given.
K is said to be a cone-valued mapping if
K is said to be a proper cone-valued mapping (or, synonymously, variable ordering cone mapping) if
Assume that K is a cone-valued mapping and that
Our interest in proper cone-valued mappings is motivated by the fact that they provide a variable ordering structure, see [Citation1,Citation10]. That is why we also call them variable ordering cone mappings. In the concluding lemma of this section, we characterize K-convexity for the differentiable case.
Lemma 2.2
[Citation1,Citation6]
Let the set C and the mappings K and F be given as in the previous definition. Furthermore, assume that , K is a cone-valued mapping such that
is closed and convex for all
, and that F is continuously differentiable on an open neighbourhood of C. Then , we have the following:
If
If F is K-convex on C and
3. Cone of separations on
Throughout this section, we assume the following.
According to Lemma 2.2, these assumptions imply that
(5)
(5) As already mentioned, the motivation of this paper is closely related to the consideration of proper cone-valued mappings. These mappings have the property that
,
are closed cones. Obviously, the supposed closedness of
implies already the closedness of
,
. In order to avoid confusion concerning the motivation of this paper, we will sometimes assume that
is closed and use the notation of a proper cone-valued mapping. The following definition is basic for this section.
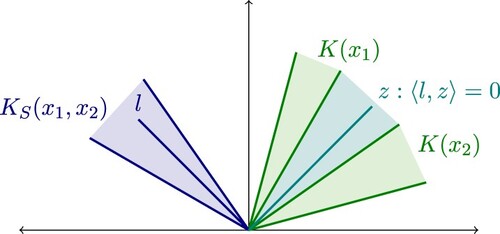
Definition 3.1
The set
is called the cone of separations for
.
Obviously, it holds that whenever
. In Figure , a cone of separations is illustrated assuming m = 2 and
.
Figure 1. A cone of separations for when m = 2.
The goal of this section is to relate some properties of the mapping F to those of the cone of separations. The next lemma presents some properties of .
Lemma 3.1
If
If
It is
Proof.
(ii) It is easily seen that is convex and closed. Suppose for a moment that
is not pointed, that is, there exists
with
From the previous expression, it follows that
for all
and all
. However, this is not possible since
and
are solid and, therefore, span the whole space
.
(iii) By (ii), we only have to show that is solid. By Lemma 2.1(iii) and since
and
are pointed, there exist
such that
for all
and all
. Hence,
The statements (i) and (iv) are obvious.
The first theorem in this section relates to the Jacobian of F.
Theorem 3.1
If , then
.
Proof.
Let and suppose that
. By definition, we have
(7)
(7) for all
and
. Hence, by the K-convexity of F, (Equation5
(5)
(5) ) and (Equation7
(7)
(7) ), we get for all
that
and, therefore,
Now, let a real number
be arbitrarily chosen. Substituting
, we get
By
, letting
yields a contradiction since the left-hand side of the latter inequality is finite, while its right-hand-side becomes unbounded. This completes the proof.
As a consequence, we obtain the following corollary.
Corollary 3.1
For all
If
Proof.
(i) By (Equation5(5)
(5) ), the K-convexity of F implies
for all
. Combining this with (Equation7
(7)
(7) ) it follows that
and therefore,
(8)
(8) By Theorem 3.1, we obtain the desired result.
(ii) Since is a solid cone, there exist
and a real number
such that
Then, there exist linearly independent vectors
and by Theorem 3.1, we have
The linear independence of
implies
.
We conclude this section by presenting its main result.
Theorem 3.2
Let be an open and connected set. If there exists
such that
for all
, then
is an affine mapping.
Proof.
By Lemma 3.1(iii), is a solid cone for all
and by Corollary 3.1(ii), we get the system
whose solution is
for some
.
Note that the fact that F has to be an affine mapping, under the assumptions of Theorem 3.2, is a surprising result given the flexibility of variable order structures.
4. Minimal variable K-convexification
In this section, we study a particular cone-valued mapping which provides a theoretical approach to obtain K-convex mappings. For a more practical approach, we refer to [Citation16], where Bishop-Phelps and simplicial cones are used. Throughout this section assume the following:
Definition 4.1
The set
The mapping
It is easily seen that is a convex and closed cone for all
, and that, by Lemma 2.2(i), F is
-convex on C. Note that
need not to be pointed. According to the previous definition, the minimality of
is defined with respect to all
.
Lemma 2.2(i) implies that F is K-convex on C for all . Moreover, Lemma 2.2(ii) yields that
whenever the assumptions of Lemma 2.2 are fulfilled, that is, whenever F is K-convex on C,
is closed and
is convex for every
.
The next lemma presents a specific form for the minimal variable K-convexification of F on C. For this define the mapping by
and let
.
Lemma 4.1
For all we have
.
Proof.
By (ii) in Definition 4.1, we have for all and all
that
and therefore,
for all
. Since
is a convex and closed cone, we get
for all
.
On the other hand, is a closed and convex cone for all
and
for all
. Therefore,
for all
which completes the proof.
Following [Citation1], one is furthermore interested in conditions which are related to the existence of a proper cone such that
(10)
(10) for all
. The following lemma presents a necessary condition for this property.
Lemma 4.2
Assume that there exists a proper cone such that (Equation10
(10)
(10) ) holds for all
. Then, there exists
such that the function
given as
is convex on C.
Proof.
Since for all
, by (ii) in Definition 4.1, we have
(11)
(11) for all
. Applying Lemma 2.1(i), there exist
and
such that
(12)
(12) for all
. By (Equation11
(11)
(11) ) and (Equation12
(12)
(12) ), we get
for all
. Obviously, the latter means that
is convex.
Our next goal is to present a sufficient condition for the existence of a proper cone such that (Equation10
(10)
(10) ) holds for all
. For this, we assume in the remainder of this section that the set C is compact and that the mapping F is twice continuously differentiable on an open neighbourhood of C. Furthermore, for
define the function
where
.
Lemma 4.3
Assume that there exists a vector such that
is positive definite (denoted by
) for all
. Then, there exist real numbers
such that
for
whenever
.
Proof.
Suppose contrarily that there exist two sequences such that
and that
(13)
(13) Note that
, since C is compact. Obviously, we have
A componentwise (
denote the components of F) second-order Taylor expansion separately for each of the both parts of the latter fraction yields
(14)
(14) By
, the right-hand side in (Equation14
(14)
(14) ) is finite which contradicts (Equation13
(13)
(13) ).
The next theorem presents a sufficient condition for the existence of a proper cone such that (Equation10
(10)
(10) ) holds for all
. The cone
, as defined in (Equation16
(16)
(16) ), will be later used in Lemma 4.5 as well as in Proposition 4.2.
Theorem 4.1
Assume that there exists a vector such that
for all
. Then, there exists a proper cone
such that
for all
.
Proof.
By Lemma 4.3, there exist real numbers and
such that
for
whenever
. Furthermore, since
for all
, it follows that
for all
with
. Hence, the fraction
is defined for all
with
, and the compactness of C implies that there exists a real number M>1 such that
(15)
(15) for all
with
. Now, define the set
(16)
(16) Since M>1, it is easily seen that
and, therefore,
is solid. Moreover,
is obviously a proper cone. By (Equation15
(15)
(15) ), we have
for all
with
and, therefore,
for all
. Finally, by Lemma 4.1, we get
for all
which completes the proof.
Note that if m = 2 and the assumptions of Theorem 4.1 hold, then we can obtain a formula for as follows. Let
with
, where w is given as in Theorem 4.1. Moreover, for
let
(17)
(17)
(18)
(18) Then, we have
(19)
(19) Obviously, finding
and
is not trivial and a global optimization method must be used (see, e.g. [Citation17, Subsection 1.1.4]).
Example 4.1
Let n = m = 2, and
Take
and fix
. By using (Equation17
(17)
(17) ) and (Equation18
(18)
(18) ), we compute
,
for
and list the corresponding results in the following table:
Table
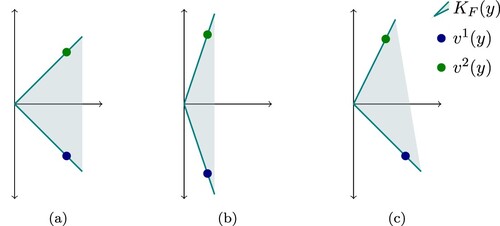
Next, we deal with the Lipschitz continuity of two generators of . For this we recall the assumptions given just before Lemma 4.3, namely, that C is a compact set and F is twice continuously differentiable. We start with the following lemma.
Figure 2. A minimal variable K-convexification for m = 2. (a) , (b)
and (c)
.
Lemma 4.4
Let
There exists
Let
Proof.
The compactness of A and B implies (i). Since is continuously differentiable and C is compact, it holds that
is Lipschitz continuous on
. Hence, there exists
such that
for all
. For proving (iii) consider
Now, we prove the Lipschitz continuity of the two generators.
Proposition 4.1
Let the set-valued mapping be given as
Then, G is Lipschitz continuous on C.
Proof.
Obviously, we only have to show that there exists such that
for all
. Since
is a compact set for all
, by Lemma 4.4 (i), it follows that there exists
such that
(20)
(20) for all
. Moreover, there exist
,
,
with
(21)
(21) Choosing
(22)
(22) and substituting (Equation21
(21)
(21) ) and (Equation22
(22)
(22) ) into (Equation20
(20)
(20) ), we get
(23)
(23) Then, the statement follows by applying the triangle inequality and Lemma 4.4 (ii).
The generator used in the next result is in general not Lipschitz continuous on C. However, we present a sufficient condition for its Lipschitz continuity on a subset of C.
Lemma 4.5
Let , M>1 and the cone
be given as in (Equation16
(16)
(16) ). Assume that
,
,
and
Then, we have
Proof.
Let Φ be an orthogonal matrix whose first row is w. Then,
As mentioned just before Lemma 4.5, the next result yields a sufficient condition for a generator to be Lipschitz continuous (only) on a subset . Here, we have to ‘cut out’ a subset from
. We refer also to Remark 4.1, where we discuss how, under certain conditions, this result could be used.
Proposition 4.2
Let be a compact convex set. Assume that for some
it holds that
for all
, and that there exists
such that
(24)
(24) for all
. Then, the set-valued mapping
, given as
is Lipschitz continuous on A.
Proof.
We will prove that G is locally Lipschitz continuous for any arbitrarily chosen . Then, the Lipschitz continuity of G on A follows from the convexity and the compactness of A. By Theorem 4.1, there exists a proper cone
such that
where
is given as in (Equation16
(16)
(16) ) for certain M>1. Let
be given as in Lemma 4.4 (ii). Choose
By Lemma 4.4 (ii), we have
(25)
(25) whenever
for
. Next, we will show that
(26)
(26) Analogously to the proof of Proposition 4.1, by (Equation24
(24)
(24) ), we get
(27)
(27) with
(28)
(28) Note that in (Equation28
(28)
(28) ), the two inequalities follow from (Equation24
(24)
(24) ) and (Equation25
(25)
(25) ), respectively. By Lemma 4.4 (iii) and (Equation27
(27)
(27) ), we get
(29)
(29) Moreover, by Lemma 4.5 and (Equation28
(28)
(28) ), it follows that
(30)
(30) Finally, applying the triangle inequality, Lemma 4.4 (ii) and using (Equation30
(30)
(30) ) in (Equation29
(29)
(29) ), we obtain (Equation26
(26)
(26) ).
Remark 4.1
Proposition 4.2 can be exploited in the following way. Let be a set for which the assumptions of Proposition 4.2 are fulfilled. Choose a cone-valued mapping
with
where
is a fixed cone satisfying
for
and
for
. Define the set-valued mapping
Since
is bounded, the Hausdorff distance is a metric for the family of compact subsets of
(see, e.g. [Citation15, Section 4C]). A moment of reflection shows that
is continuous on C whenever its codomain is endowed with this metric. Moreover, by Proposition 4.2, it follows that
is Lipschitz continuous on A and, by definition, that
is Lipschitz continuous on
. Consequently,
is Lipschitz continuous on C. We will come back to this approach at the end of Section 5. Of course, such a choice of
is not always possible. Necessary or sufficient conditions for its existence will be considered in future research.
5. A particular case
In this section, we study a particular case and apply to it the general approach described in the previous sections. Specifically, we consider an interval and a mapping
,
. Moreover, we assume that
,
, where
and
,
denote the first and second derivative at
, respectively. For this case, we obtain a particular expression for
. First, we define four auxiliary functions.
Lemma 5.1
Let and define
Then,
is strictly decreasing, and
is strictly increasing.
Proof.
For we get
for some
. Since
,
, it holds that
is strictly increasing. Analogously, we obtain that
is strictly decreasing.
Since , Lemma 5.1 yields for
that
for all
. Moreover, by Lemma 5.1, both
and
are injective functions. Therefore, the functions
and
, given by
are well defined. The following two results concern the relationship between the latter two functions and
.
Lemma 5.2
The right derivatives of and
at x = 0 are
Proof.
We show it for . Since
, we have
(31)
(31) After applying L'Hôpital's rule twice we get the desired result. The proof runs analogously for
.
Lemma 5.3
If is an increasing function on
, then
is concave and
is convex.
Proof.
For showing the convexity of , we prove that
(32)
(32) for all
. For
and
, after a straightforward calculation, we get that
Since
, in order to obtain (Equation32
(32)
(32) ), we use that
By Cauchy's mean value theorem, the latter inequality holds since
, and
is an increasing function on
. The concavity of
is obtained analogously.
In the remainder of this section, we assume that is increasing on
. The next result is a consequence of Lemma 5.3.
Corollary 5.1
Let . Then, we have
for all
.
Proof.
If , then for
we have
. By the convexity of
, Lemma 5.2 implies
Hence, we obtain
and, analogously, for
that
A combination of these two results delivers for
that
and a corresponding result for
. This completes the proof.
In the next result, we see the advantage of considering . We show that in this case, the minimal variable K-convexification of F on
can easily and directly be calculated.
Theorem 5.1
Let the mappings and
be given as
and define the set-valued mapping
. Then,
.
Proof.
We distinguish two cases.
Case 1: Let . Then, we have
Hence, it holds that
(33)
(33) Next, we prove that
(34)
(34) Note that
. Now, choose
. Therefore, there exists
such that
. From Corollary 5.1, it follows for
that
and that
Thus, there exists
such that
A moment of reflection shows that the latter equation yields
(35)
(35) Note that in (Equation35
(35)
(35) ) the coefficients of
and
are nonnegative since
,
,
and
. Thus, (Equation34
(34)
(34) ) is shown. By Lemma 4.1, (Equation33
(33)
(33) ) and (Equation34
(34)
(34) ), we get
.
Case 2: Let (analogously for
). Applying L'Hôpital's rule twice, we get
and by
, we get
Moreover, letting
in Corollary 5.1, we obtain
(36)
(36) Using (Equation36
(36)
(36) ) we deduce an expression which is analogous to (Equation35
(35)
(35) ). The remaining part of the proof runs as in Case 1.
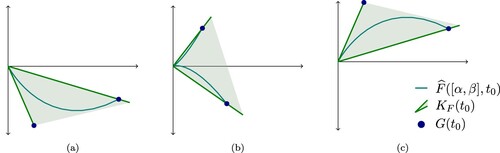
Example 5.1
Let ,
and
. By using Theorem 5.1, we have
for
, which is illustrated in Figure .
Figure 3. Application of Theorem 5.1 for with
and
. (a)
, (b)
and (c)
.
Note that the set-valued mapping in Theorem 5.1 is not Lipschitz continuous. Indeed, since
the function
is not continuous. However, we can find a cone-valued mapping
close to
such that its generator mapping is Lipschitz continuous. As an example, fix
, define
and set
Analogously to Proposition 4.2, it can be shown that
is Lipschitz continuous on
. Moreover, it is easy to check that
for all
and that
for all
. This latter construction represents an application of the strategy described in Remark 4.1 to this particular case considered in the current section.
6. Final remarks
In this paper, we considered vector optimization problems with variable ordering structures. They are related to K-convex mappings where K refers to a proper cone-valued mapping. This model has several applications, e.g. in medical diagnosis and portfolio optimization. We defined the cone of separations and showed that under certain assumptions the corresponding K-convex mapping needs to be affine. Note that this is a somehow counter-intuitive property and its geometric meaning need still to be discussed in the future. Moreover, we introduced the concept of the minimal variable K-convexification , presented sufficient conditions for the images of this cone-valued mapping to be contained in a proper cone and proved the Lipschitz continuity of some corresponding generator mappings. Note that we described a theoretical approach for generating a variable ordering mapping for which a given mapping is K-convex. We applied this approach to a particular case; the construction of further applications will be a topic for further research.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
- Bello Cruz JY, Bouza Allende G. A steepest descent-like method for variable order vector optimization problems. J Optim Theory Appl. 2014;162:371–391.
- Graña Drummond LM, Iusem AN. A projected gradient method for vector optimization problems. Comput Optim Appl. 2004;28(1):5–29.
- Graña Drummond LM, Svaiter BF. A steepest descent method for vector optimization. J Comput Appl Math. 2005;175(2):395–414.
- Luc DT. Theory of vector optimization. New York (NY): Springer; 1989.
- Luc DT, Tan NX, Tinh PN. Convex vector functions and their subdifferential. Acta Math. 1998;23(1):107–127.
- Bello Cruz JY, Bouza Allende G. On inexact projected gradient methods for solving variable vector optimization problems. Optim Eng. 2020. Available from: https://doi.org/10.1007/s11081-020-09579-8
- Durea M, Strugariu R, Tammer C. On set-valued optimization problems with variable ordering structure. J Global Optim. 2015;61:745–767.
- Engau A. Variable preference modeling with ideal-symmetric convex cones. J Global Optim. 2008;42:295–311.
- Wacker M, Deinzer F. Automatic robust medical image registration using a new democratic vector optimization approach with multiple measures. In: Yang GZ, editor. Medical image computing and computer-assisted intervention – MICCAI. New York: Springer; 2009.
- Eichfelder G. Variable ordering structures in vector optimization. New York (NY): Springer; 2014.
- Boyd S, Vandenberghe L. Convex optimization. Cambridge: Cambridge University Press; 2009.
- Dattorro J. Convex optimization & Euclidean distance geometry. Palo Alto (CA): Meboo Publishing USA; 2013.
- Jahn J. Vector optimization: theory, applications and extensions. New York (NY): Springer; 2011.
- Mordukhovich BS. Variational analysis and generalized differentiation. New York (NY): Springer; 2006.
- Rockafellar RT, Wets RJ. Variational analysis. New York (NY): Springer; 1998.
- Bouza Allende G, Hernández Escobar D, Rückmann J-J. Generation of K-convex test problems in variable ordering settings. Rev Inv Oper. 2018;39(3):463–479.
- Pintér JD. Global optimization in action. New York (NY): Springer; 1996.