
ABSTRACT
Producing comparable/greater ground reaction forces (GRFs) at faster running speeds is beneficial for sprint performance, and assisted sprint training is used to induce faster running speed conditions. This study aimed to demonstrate the characteristics of assisted sprinting at the maximal speed phase and investigate acute differences to control sprinting. Fifteen sprinters completed control and assisted (5 kg) sprints over force platforms. Assisted sprinting increased running speed (9.3% mean difference), while propulsive mean force (−4.3%) and impulse (−12.4%) decreased, suggesting that running speed improvements were caused primarily by assisted pulling force rather than improvements in anteroposterior force production of athletes. In addition, vertical mean force increased (4.2%), probably due to braking mean force (34.2%) and impulse (32.5%) increases. Magnitude of control trial maximum speed was achieved earlier (during acceleration) in assisted trials, and net anteroposterior (includes both braking and propulsive components) mean force (67.2%) and impulse (67.9%) increased at this matched speed, suggesting that assisted sprints could be used to practice producing greater GRFs at comparable speeds. Running speed improvement by pulling force was associated with contact time decreases (r = -.565), suggesting that shortening contact time may be important for effective assisted sprinting.
Introduction
Assisted sprinting refers to acute sprint running training methods that induce running speeds above an athletes’ achievable maximum speed in control trials (no resistance or assistance), sometimes referred to as “overspeed” or “supramaximal speed”, allowing an athlete to exceed their speed barrier (Van den Tillaar & Gamble, Citation2017, Citation2018). As a direct result of increasing maximum speed, assisted sprinting typically involves flying sprints or longer distance repetitions in which the maximum speed phase is reached (Van den Tillaar & Mirkov, Citation2021). This training method has been implemented via wind-aided, downhill running, partner assisted towing, high speed treadmills and robotic pulley machines. Robotic pulley machines, also called towing systems or motorised devices, are slowly gaining popularity by becoming more readily available, accurate and researched (Rakovic et al., Citation2022). These devices, such as the dynaSpeed (MuscleLabTM, Stathelle, Norway), assist the athlete by pulling a cable (attached via a waist harness) in the direction of the sprint. The dynaSpeed can produce accurate resistance or assistance when sprinting, has the added capability of applying variable loads within a single sprint repetition, and can measure force, velocity and power.
Theories on the benefits of assisted sprinting include prolonging time to fatigue or helping to rehabilitate athletes returning from injury due to reducing load, and potential performance improvements through neural adaptivity to greater speed or increasing sprint specific strength (Rumpf et al., Citation2016; Stoyanov, Citation2019). However, there is minimal research into the long-term adaptations of assisted training interventions, and firstly understanding the acute effects is important to increase knowledge, guide training prescription and design appropriate interventions. When compared to unassisted sprinting (control trials) previous research has shown that assisted sprinting induces significantly increased running speed (mean difference percentage 2.1–14.3%), step length (0.9–11.4%) and flight times (−3.1–6.1%), significantly decreased contact times (−1.0–9.6%), and non-significant (p > .050) changes in step frequency (−0.23–5.9%) (Cecilia-Gallego et al., Citation2022; Van den Tillaar & Mirkov, Citation2021). In terms of ground reaction forces there have been some studies suggesting that assisted sprinting may cause propulsive force decreases, braking force increases and vertical force increases (Mero & Komi, Citation1986, Citation1987; Mero et al., Citation1987). However, no known study has measured net impulse during assisted sprints, clarified acute effects due to newer robotic pulling machines, or controlled for running speed as a confounding factor. Furthermore, there are conflicting views and little research into the biomechanical reasoning of acute effects, thus it is uncertain whether acute changes due to assisted sprinting are produced by greater muscle activation or ground reaction force production by the athlete or are a product of the assistance. Matching the running speed between control and assisted trials may elucidate the influence from the assisted pulling of the device alone. Producing comparable or more ground reaction force at faster running speeds is a benefit for training and the desired result of assisted methods, however, producing less ground reaction force may indicate that increased speed is only a product of the assistance.
Therefore, the primary aim was to investigate the effect of assisted sprinting upon the ground reaction forces and spatiotemporal characteristics during the maximum speed phase. Demonstrating acute differences between control and assisted sprinting may inform practitioners of the expected changes that would occur during training due to assisted sprints. Furthermore, in theory we can control for running speed by comparing variables between control and assisted trials at a matched speed to demonstrate whether ground reaction force differences occur due to the assisted pulling of the device. Thus, the secondary objective was to compare variables between control and assisted sprints at a matched running speed. Finally, it may be important to understand the variables that most influence increased performance (running speed) during assisted sprinting, so the third objective was to calculate the correlation of the between trial (control vs. assisted) changes of ground reaction forces and spatiotemporal variables and the changes in running speed during the maximum speed phase. These relationships may explain the background of effective assisted sprinting.
Materials and methods
Fifteen sub-elite sprinters competing at regional – national level volunteered to participate (age: 20.5 ± 1.4 years; stature: 1.75 ± 0.06 m; body mass: 68.3 ± 6.4 kg; 100 m personal best, 11.31 ± 0.38 s). Informed consent was obtained from each participant prior to the study. The study complied with current ethical regulations for research and was approved by the institutional research ethics committee (#11–54).
Two familiarisation sessions and one testing session were completed with a minimum of two days between sessions. During familiarisation sessions a battery of 50 m sprints with at least five minutes passive recovery between repetitions and 30 m sprints with 3 minutes passive recovery between repetitions were performed. In both familiarisation sessions, trials included two assisted 50 m sprints with 5 kg pulling assistance to familiarise participants with the robotic pulley machine before the main testing session. In addition, the participants all have previous experience with resisted and assisted sprint training methods, practicing these in their regular training schedules and participating previously in similar research projects. The active assistance was provided by dynaSpeed, a robotic pulley machine (Ergotest Technology AS, Stathelle, Norway) for familiarisation and testing sessions. In each session the machine was linearly positioned 82 m away from the start line and the cable extended before each assisted trial. The cable was attached via a belt tightened around participants’ waists.
The main testing session (data collection) was performed on an indoor athletic track over a 50 m long force platform system (sampling frequency set at 1000 Hz) consisting of 54 force platforms (TF-90100, TF-3055, TF-32120, Tec Gihan, Uji, Japan). After a self-selected warm up, participants performed one-two unresisted 50 m sprints (control) followed by one-two assisted 50 m sprints with 5 kg pulling assistance in randomised order. There was a minimum of five minutes passive recovery between repetitions. Each sprint trial was initiated from a standing start. Participants wore their own spiked sprint race shoes and the same attire for each trial.
To reduce random noise in order to appropriately detect foot strike and toe-off instants a 50 Hz low-pass fourth-order Butterworth filter was used on raw ground reaction force signals in reference to previous studies (K. P. Clark et al., Citation2017; Dorn et al., Citation2012). Spatiotemporal variables and ground reaction forces at every step were calculated in reference to previous studies (Gleadhill & Nagahara, Citation2022; Nagahara et al., Citation2017), using the following procedures. Step-to-step contact and flight times were determined depending on whether the foot contacted the ground with a threshold of 20 N of vertical ground reaction force for on and off instants. Step duration was the time between two consecutive foot strikes. Step frequency was calculated as the inverse of step duration. Foot placement was defined as the centre of pressure position at the middle of the contact phase step-to-step. Step length was calculated as the anteroposterior distance between the step-to-step centre of pressure positions. The running speed was calculated as a product of step length and frequency. The contact and flight length were calculated by the product of running speed and contact or flight time respectively. During each steps contact phase, the mean propulsive, braking, net anteroposterior (includes both braking and propulsive components) and vertical forces were calculated. In addition, the step-to-step propulsive, braking, net anteroposterior and vertical impulses during the contact phase were calculated by integrating ground reaction forces in the respective directions. Finally, the effective vertical mean force and impulse during the contact phase was computed by subtracting the body mass from the vertical force, and then integrating it with respect to duration (Morin et al., Citation2015; Weyand et al., Citation2000). All ground reaction force and impulse variables were divided by body mass.
The moving average of two consecutive steps was calculated for each variable and the maximum speed phase was determined by the greatest running speed over the measured distance. Averaging measurements over two steps was incorporated to cancel any noise possibly arising from bilateral differences and random human variability of cyclic movement (Nagahara et al., Citation2017; Van Emmerik & van Wegen, Citation2000). Descriptive statistics were calculated as means and standard deviations. To examine the difference between variables during the maximum speed phase (control vs. assisted) a two-tailed paired T test was performed on each variable. The mean difference (represented as a percentage) and Cohen’s d was used as an effect size for the differences between trials. Threshold values for the interpretation of Cohen’s d effect sizes were < 0.2 (trivial), 0.2 – <0.6 (small), 0.6–1.2 (moderate), and > 1.2 (large) (Hopkins et al., Citation2009). This statistical procedure was then repeated during running speed matched steps between the control and assisted trials, to compare the fastest steps where maximum speed was reached in the control trials and the steps that matched this speed closest in the assisted trials. Then separately, Pearson’s correlation coefficients of the changed running speed (percentage difference) between the control and assisted sprints for the fastest two steps (maximum speed phase) with the change (percentage difference) in other measured variables were calculated. Therefore, the correlation analysis was used to determine whether the change in each kinematic or kinetic variable measured was correlated to the change (improvement) in running speed when assisted sprinting was performed. For all analyses the significance level was set at p ≤ .050.
Results
demonstrates the mean anteroposterior net force produced during control, maximum speed in assisted, and matched speed in assisted conditions. The absolute net anteroposterior mean difference between trials during maximum speed was 49.2 N, and the pulling force of the 5 kg assistance was approximately 50 N. During assisted trials the running speed, step length and frequency, contact and flight length, braking mean force, braking impulse, vertical mean force and effective vertical mean force all significantly increased (p ≤ .045) and demonstrated small – large (effect size) changes compared with the control trials (). Conversely when compared to the control, during assisted trials the contact time, propulsive mean force, propulsive impulse, anteroposterior net mean force and anteroposterior net impulse all significantly decreased (p ≤ .036) and demonstrated small – large changes.
Figure 1. Free body diagram with the average effective anteroposterior net mean force, effective vertical mean force, and the pulling mean force during maximum speed in control (normal) and assisted trials, and during matched (same) speed in the assisted trials. Units in newtons (N).
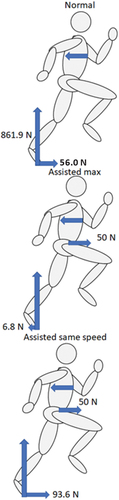
Table 1. Differences between the control (baseline) and assisted trials during the maximum speed phase. Significant difference specified as p value ≤ .050, indicated with bold text and an asterisk.
When matching the running speed during the steps where maximum speed was reached in the control and the steps that matched this speed closest in the assisted trials, maximum speed achieved occurred at approximately the 22nd step (mean) or around 39–40 m after the start during the control trial. The matched speed during the assisted trial occurred at approximately the 12th step (mean) or around 20–21 m after the start. Flight time and length, braking mean force and braking impulse all significantly decreased (p ≤ .042) during the assisted trials with small – large effect size changes compared to the control, while propulsive mean force, propulsive impulse, anteroposterior net mean force and anteroposterior net impulse all significantly increased (p ≤ .042) during the assisted trials with small – large effect size changes compared to the control (). No other significant differences in the other variables between assisted and control sprints were found. Furthermore, only a significant linear relationship between the change in running speed during the maximum speed phase with the change in other parameters was found for contact time ().
Table 2. Differences between the control (baseline) and assisted trials during the maximum speed phase in the control and the steps that matched this speed closest in the assisted trial. Significant difference specified as p value ≤ .050, indicated with bold text and an asterisk.
Table 3. Correlation between the change (%) between trials (control vs. assisted) and performance change between trials (running speed) during the maximum speed phase. Significant difference specified as p value ≤ .050, indicated with bold text and an asterisk.
Discussion
This study clarified the acute effects of assisted sprinting during the maximum speed phase with an electric towing device. The main findings were that all spatiotemporal parameters and kinetics, except flight time and vertical impulse, changed when sprinting with assistance. When matching the speed between conditions in general there were similar sprint kinematics and changed anteroposterior force kinetics that occurred at earlier distances during assisted sprinting. Only a significant correlation for contact time change was found when comparing changes in running speed with changes in kinematics and kinetics between the two conditions.
Considering a kinematic perspective, previous research suggested that assisted loads inducing an increase of maximum running speed by 5–10% may be optimal, and > 10% may be detrimental to sprint mechanics (Cecilia-Gallego et al., Citation2022). For this purpose a load of 5 kg assistance has been recommended previously (K. Clark et al., Citation2021; Van den Tillaar & Mirkov, Citation2021). This assisted load resulted in increasing running speed by 9.3%, which is consistent with an earlier study by Van den Tillaar and Mirkov (Citation2021). The increase in speed was a product of increased step length and frequency, with less time spent in the contact phase (). When running speed increases and contact time decreases this may be due to faster force application during contact, increased vertical force production, increased step frequency, a greater displacement when the foot was in contact with the ground (contact length increases), or from pulling of the assistance. In addition, step length consistently demonstrates acute improvements from assistance (Cecilia-Gallego et al., Citation2022), due to pulling the athlete greater distances within the same flight time durations, so step length contributes to greater running speed and was improved during both contact and flight in the present study. The effect on flight time is inconsistent between studies with some studies demonstrating no significant difference in flight time between control and assisted trials (D. A. Clark et al., Citation2009; Van den Tillaar & Mirkov, Citation2021), while others showed flight time increases (K. Clark et al., Citation2021; Sedlacek et al., Citation2015). In the present study participants were faster and covered more distance in the air during assisted trials (as step length, flight length and running speed increased) but produced less propulsive force and spent the same amount of time in the air per step. Taken together, assisted sprinting may be used as a training tool to break the speed barrier and practice increased step length, however, the increased step length was a product of the pulling force from assistance and not increased propulsive force, so may not translate to control sprinting.
The ground reaction force may be considered to better understand the kinematic differences (). Results demonstrated similar trends to previous studies showing an increased braking mean force and decreased propulsive mean force and anteroposterior net mean force (Mero & Komi, Citation1986, Citation1987; Mero et al., Citation1987). Based on the force-velocity relationship smaller forces may be produced at greater running speeds, and greater forces may be produced during eccentric phases, possibly explaining the greater braking and decreased propulsive forces during assisted trials. However, during maximum speed in control sprinting athletes typically demonstrate propulsive impulse greater than braking impulse by approximately 0.1 Ns/kg to overcome air resistance, which is supported by the control trial results in the present study, but during assisted sprinting results showed comparable impulse between propulsive (0.23 Ns/kg) and braking (0.24 Ns/kg) components. Therefore, not enough propulsive force was produced during assisted sprinting to maintain maximum speed, thus was maintained by the assistance. This is supported by the 62.8 N anteroposterior net mean force difference between trials (difference between −6.8 N in the assisted trial and 56.0 N in the control trial) being qualitatively comparable to the 50 N pulling force (). Furthermore, Newton’s first law applies at the maximum speed phase (constant velocity) where the sum of all forces is zero, and there is only a finite amount of force that an athlete can produce. Therefore, due to the athlete being able to produce less propulsive force and the assistance adding a pulling force, the maximum speed was kept by the decreased propulsive force and the increased braking force, which may further be a collateral reason for the increased vertical force.
When considering vertical components, an increased braking force is typically accompanied with (and beneficial for) producing greater vertical force within shorter durations. The moderately increased vertical force during maximum speed in assisted trials may have been produced by the athlete due to the horizontal pulling nature of the device (), resulting in shorter contact time and greater step frequency. Contact time may have been further reduced through athletes being carried from the assistance instead of pushing over the entire contact phase (Cecilia-Gallego et al., Citation2022). Increased vertical force contributes to greater speed during the maximum speed phase (Colyer et al., Citation2018; Nagahara et al., Citation2018), and producing increased forces at greater speeds may lead to sprint-specific strength benefits. Practically, assisted sprinting may be a good training tool to practice increased vertical force during the maximum speed phase, but should be considered with the trade-off of possibly negative net anteroposterior ground reaction force and impulse changes, and this can now be a focus of future training interventions. Furthermore, due to the shorter propulsive contact phase the effective vertical impulse was comparable between trials. Thus, the amount of vertical force production for producing vertical velocity was the same resulting in comparable flight time, which suggests that assisted sprinting may not be much different to control sprinting. Since the flight time was comparable between trials and contact time shorter, the step frequency during assisted sprints was greater. Step frequency changes due to assistance are inconsistent with some studies demonstrating no significant differences (K. Clark et al., Citation2021; Van den Tillaar & Mirkov, Citation2021), while others show increases (D. A. Clark et al., Citation2009; Yusaku & Junichiro, Citation2008), including the present study (). Step frequency is not directly influenced by the assistance and has a technical component, so any increases may be accompanied with practical changes such as increased angular retraction velocity of the thigh through neuromuscular activation improvements (K. P. Clark et al., Citation2020; Kakehata et al., Citation2021; Miyashiro et al., Citation2019). However, individual differences may be the reason for inconsistent flight time and step frequency findings between and within studies (Cecilia-Gallego et al., Citation2022), thus individuals that can increase step frequency with assistance may benefit more from assisted sprint training and coaches may wish to focus on ground contact preparation and placement during assisted sprinting.
The second objective of the present study was tested using a matched speed analysis (). Since the running speed and vertical force and impulse were the same, the step length and frequency were comparable between trials. In theory the kinetics and kinematics of sprinters between repetitions should be comparable, but athletes during assisted trials in the present study were producing greater net anteroposterior mean forces (more propulsion and less braking) at the same speed compared to control trials. Despite running speed being matched successfully, these results may have been influenced by comparing characteristics at different phases or sections of the sprint (acceleration in assisted trial vs. maximum speed phase in control trial). There are transitions in a linear sprint race that are traditionally broken into start, acceleration, maximum speed and deceleration phases. Further breakpoints have been shown within the acceleration phase, separating acceleration into the initial, middle and later acceleration sections which have unique kinematics and kinetics (Nagahara et al., Citation2014, Citation2020). Results showed that the maximum speed phase identified in the control trials was indicative of the maximum speed phase (or occurred near the end of the later acceleration section), and the matching comparisons from the assisted trials occurred during the middle acceleration section (approximately the 12th step around 20–21 m mark). Comparing middle acceleration to maximum speed may influence results through less energy expenditure earlier in the sprint and phase specific kinematic differences such as posture being less upright during acceleration. Newton’s first law applies during maximum speed in control trials, while during matched speed in assisted trials Newton’s second law applies (force equal to product of mass and acceleration), thus the anteroposterior net force was greater ().
Matched speed results reflect athletes could produce different forces between trials which could have acceleration or maximum speed phase training benefits, and some possible practical implications are as follows. Practicing increased propulsion and less braking may benefit anteroposterior net force production capability or efficiency by producing increased net anteroposterior mean forces at comparable or greater speeds. Additionally, athletes could reach their control maximum speed within shorter durations, allowing more time to accelerate beyond this speed barrier before energetic limitations are reached. Training to the same speed as the control maximum speed may represent a lower intensity with assistance, so performing more repetitions to this speed could increase training volume. Furthermore, although there were no significant step length and frequency differences, assisted trials showed a small effect of higher step frequency (4.55 Hz assisted vs. 4.48 Hz control) and lower step length (2.04 m assisted vs. 2.08 m control) to achieve the same matched running speed coupled with significant flight time and length decreases, suggesting a possibly greater reliance on step frequency. Learning to move at control maximum speed with greater step frequency could benefit recovery mechanics through faster leg repositioning during flight, so coaches may use assisted sprints to focus on technique benefits. Taken together, these practical implications are suggested as possible benefits of assisted training, and assisted sprints as a tool for acceleration training is under researched and should be a topic for future investigation.
The correlations of changes between trials with the change in running speed suggest that decreasing contact time is necessary to achieve greater speed changes during assisted sprints (). Changes in contact time may not directly result in running speed changes and no other correlations were found, demonstrating that the increment in performance was caused primarily from the pulling of the towing device. In comparison to the current results, previous research has suggested net anteroposterior mean force may be an indicator of performance during the entire sprint and showed that larger vertical forces are important during the maximum speed phase (Murata et al., Citation2018; Nagahara et al., Citation2018). Conversely, correlations during female sprint performance differ by showing no ground reaction force correlations with performance during the maximum speed phase, but significant correlations between running speed and increased step frequency and decreased contact time (Gleadhill & Nagahara, Citation2021). Taken together, there may be performance relationship differences between studies and between trials (assisted vs. control), but the ability to shorten contact time may be a requisite for improving maximal speed sprint performance. Furthermore, when comparing step length and frequency correlation coefficients as an effect size the step frequency change showed a low (or weak) positive relationship with running speed change, while step length change had negligible correlation (Mukaka, Citation2012). Although both step length and frequency correlations were not significant, increasing step frequency may also be important for effective assisted sprint training.
One limitation of the study is that only one load (5 kg) was tested, however, this was beneficial to analyse the trends between control and assisted trials, and previous research already investigated kinematic influences of different loads (van den Tillaar, 2021). In the future it would be interesting to include different assisted loads to further investigate kinetic influences. Furthermore, ideally future research should also include muscle activity measures so neuromuscular changes can be synchronously analysed with ground reaction force to elucidate whether assisted methods change neuromuscular adaptivity. Further including an analysis on other phases of a 100 m sprint such as acceleration or deceleration phases may also be interesting, as there may be potential practical applications for acceleration phase training during assisted trials.
In conclusion results demonstrated that the increased change in running speed was caused primarily by the assistance, however, producing forces at greater speeds may still be a benefit of assisted training. Practically, sprint-specific strength adaptations may be possible through increased vertical force production during maximum speed in assisted trials or increased net anteroposterior force production at the control maximum speed during assisted trials; technique or training benefits may arise by achieving control maximum speed earlier or by increasing step frequency; and the ability to shorten contact time and increase step frequency may be important for effective assisted sprint training. Now the acute changes due to assisted sprinting have been clarified, future research can elucidate whether these suggestions are possible through long-term interventions and translate to improved (or not) performance during control sprinting.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Cecilia-Gallego, P., Odriozola, A., Beltran-Garrido, J. V., & Álvarez-Herms, J. (2022). Acute effects of overspeed stimuli with towing system on athletic sprint performance: A systematic review with meta-analysis. Journal of Sports Sciences, 40(6), 704–716. https://doi.org/10.1080/02640414.2021.2015165
- Clark, K., Cahill, M., Korfist, C., & Whitacre, T. (2021). Acute kinematic effects of sprinting with motorized assistance. The Journal of Strength & Conditioning Research, 35(7), 1856–1864. https://doi.org/10.1519/JSC.0000000000003051
- Clark, K. P., Meng, C. R., & Stearne, D. J. (2020). ‘Whip from the hip’: Thigh angular motion, ground contact mechanics, and running speed. Biology Open, 9(10). https://doi.org/10.1242/bio.053546
- Clark, K. P., Ryan, L. J., & Weyand, P. G. (2017). A general relationship links gait mechanics and running ground reaction forces. Journal of Experimental Biology, 220(2), 247–258. https://doi.org/10.1242/jeb.138057
- Clark, D. A., Sabick, M. B., Pfeiffer, R. P., Kuhlman, S. M., Knigge, N. A., & Shea, K. G. (2009). Influence of towing force magnitude on the kinematics of supramaximal sprinting. The Journal of Strength & Conditioning Research, 23(4), 1162–1168. https://doi.org/10.1519/JSC.0b013e318194df84
- Colyer, S. L., Nagahara, R., Takai, Y., & Salo, A. I. (2018). How sprinters accelerate beyond the velocity plateau of soccer players: Waveform analysis of ground reaction forces. Scandinavian Journal of Medicine & Science in Sports, 28(12), 2527–2535. https://doi.org/10.1111/sms.13302
- Dorn, T. W., Schache, A. G., & Pandy, M. G. (2012). Muscular strategy shift in human running: Dependence of running speed on hip and ankle muscle performance. Journal of Experimental Biology, 215(11), 1944–1956. https://doi.org/10.1242/jeb.064527
- Gleadhill, S., & Nagahara, R. (2021). Kinetic and kinematic determinants of female sprint performance. Journal of Sports Sciences, 39(6), 609–617. https://doi.org/10.1080/02640414.2020.1837449
- Gleadhill, S., & Nagahara, R. (2022). Kinetic and kinematic changes during resisted sprinting due to towing three common parachute sizes. The Journal of Sports Medicine and Physical Fitness, 63(2). https://doi.org/10.23736/S0022-4707.22.14068-5
- Hopkins, W., Marshall, S., Batterham, A., & Hanin, J. (2009). Progressive statistics for studies in sports medicine and exercise science. Medicine and Science in Sports and Exercise, 41(1), 3. https://doi.org/10.1249/MSS.0b013e31818cb278
- Kakehata, G., Goto, Y., Iso, S., & Kanosue, K. (2021). Timing of rectus femoris and biceps femoris muscle activities in both legs at maximal running speed. Medicine and Science in Sports and Exercise, 53(3), 643. https://doi.org/10.1249/MSS.0000000000002497
- Mero, A., & Komi, P. V. (1986). Force-, EMG-, and elasticity-velocity relationships at submaximal, maximal and supramaximal running speeds in sprinters. European Journal of Applied Physiology and Occupational Physiology, 55(5), 553–561. https://doi.org/10.1007/BF00421652
- Mero, A., & Komi, P. V. (1987). Electromyographic activity in sprinting at speeds ranging from sub-maximal to supra-maximal. Medicine and Science in Sports and Exercise, 19(3), 266–274. https://doi.org/10.1249/00005768-198706000-00014
- Mero, A., Komi, P., Rusko, H., & Hirvonen, J. (1987). Neuromuscular and anaerobic performance of sprinters at maximal and supramaximal speed. International Journal of Sports Medicine, 8(S 1), S55–S60. https://doi.org/10.1055/s-2008-1025704
- Miyashiro, K., Nagahara, R., Yamamoto, K., & Nishijima, T. (2019). Kinematics of maximal speed sprinting with different running speed, leg length, and step characteristics. Frontiers in Sports and Active Living, 1, 37. https://doi.org/10.3389/fspor.2019.00037
- Morin, J. B., Slawinski, J., Dorel, S., Couturier, A., Samozino, P., Brughelli, M., & Rabita, G. (2015). Acceleration capability in elite sprinters and ground impulse: Push more, brake less? Journal of Biomechanics, 48(12), 3149–3154. https://doi.org/10.1016/j.jbiomech.2015.07.009
- Mukaka, M. M. (2012). Statistics corner: A guide to appropriate use of correlation coefficient in medical research. Malawi Medical Journal: The Journal of Medical Association of Malawi, 24(3), 69–71.
- Murata, M., Takai, Y., Kanehisa, H., Fukunaga, T., & Nagahara, R. (2018). Spatiotemporal and kinetic determinants of sprint acceleration performance in soccer players. Sports, 6(4), 169. https://doi.org/10.3390/sports6040169
- Nagahara, R., Kanehisa, H., & Fukunaga, T. (2020). Ground reaction force across the transition during sprint acceleration. Scandinavian Journal of Medicine & Science in Sports, 30(3), 450–461. https://doi.org/10.1111/sms.13596
- Nagahara, R., Matsubayashi, T., Matsuo, A., & Zushi, K. (2014). Kinematics of transition during human accelerated sprinting. Biology Open, 3(8), 689–699. https://doi.org/10.1242/bio.20148284
- Nagahara, R., Mizutani, M., Matsuo, A., Kanehisa, H., & Fukunaga, T. (2017). Association of step width with accelerated sprinting performance and ground reaction force. International Journal of Sports Medicine, 38(7), 534–540. https://doi.org/10.1055/s-0043-106191
- Nagahara, R., Mizutani, M., Matsuo, A., Kanehisa, H., & Fukunaga, T. (2018). Association of sprint performance with ground reaction forces during acceleration and maximal speed phases in a single sprint. Journal of Applied Biomechanics, 34(2), 104–110. https://doi.org/10.1123/jab.2016-0356
- Rakovic, E., Paulsen, G., Helland, C., Haugen, T., & Eriksrud, O. (2022). Validity and Reliability of a Motorized Sprint Resistance Device. Journal of Strength & Conditioning Research, 36(8), 2335–2338. https://doi.org/10.1519/JSC.0000000000003830
- Rumpf, M. C., Lockie, R. G., Cronin, J. B., & Jalilvand, F. (2016). Effect of different sprint training methods on sprint performance over various distances: A brief review. Journal of Strength and Conditioning Research, 30(6), 1767–1785. https://doi.org/10.1519/JSC.0000000000001245
- Sedlacek, J., Krska, P., & Kostial, J. (2015). Use of supra-maximal speed mean in maximal running speed depment. Gymnasium, 16(1), 39–50.
- Stoyanov, H. (2019). Effect of assisted training on the special running preparation of junior sprinters for 100 and 200 m. Human Sport Medicine, 19(3), 74–79. https://doi.org/10.14529/hsm190309
- Van den Tillaar, R., & Gamble, P. (2017). Comparison of step-by-step kinematics of resisted, normal and assisted 30 m sprints in experienced sprinters. Translational Sports Medicine, 1(4), 151–159. https://doi.org/10.1002/tsm2.27
- Van den Tillaar, R., & Gamble, P. (2018). Comparison of step‐by‐step kinematics and muscle activation of resisted, assisted, and unloaded 30‐m sprints in sprinters. Translational Sports Medicine, 1(4), 151–159. https://doi.org/10.1002/tsm2.27
- Van den Tillaar, R., & Mirkov, D. (2021). Comparison of development of step-kinematics of assisted 60 m sprints with different pulling forces between experienced male and female sprinters. PloS One, 16(7), e0255302. https://doi.org/10.1371/journal.pone.0255302
- Van Emmerik, R. E., & van Wegen, E. E. (2000). On variability and stability in human movement. Journal of Applied Biomechanics, 16(4), 394–406. https://doi.org/10.1123/jab.16.4.394
- Weyand, P. G., Sternlight, D. B., Bellizzi, M. J., & Wright, S. (2000). Faster top running speeds are achieved with greater ground forces not more rapid leg movements. Journal of Applied Physiology, 89(5), 1991–1999. https://doi.org/10.1152/jappl.2000.89.5.1991
- Yusaku, S., & Junichiro, A. (2008). Effects of supramaximal running on stride frequency and stride length in sprinters. Advances in Exercise and Sports Physiology, 14(1), 9–17.