
ABSTRACT
Globally cities are becoming experimental sites for new forms of robotic and automation technologies applied across a wide variety of sectors in multiple areas of economic and social life. As these innovations leave the laboratory and factory, this paper analyzes how robotics and automation systems are being layered upon existing urban digital networks, extending the capabilities and capacities of human agency and infrastructure networks, and reshaping the city and citizen’s everyday experiences. To date, most work in this field has been speculative and isolated in nature. We set out a research agenda that goes beyond analysis of discrete applications and effects, to investigate how robotics and automation connect across urban domains and the implications for differential urban geographies, the selective enhancement of individuals and collective management of infrastructures, the socio-spatial sorting of cities and the potential for responsible urban innovation.
“A woman drives to the outskirts of the city and steps directly on to a train; her electric car then drives itself off to park and recharge. A man has a heart attack in the street; the emergency services send a drone equipped with a defibrillator to arrive crucial minutes before an ambulance can. A family of flying maintenance robots lives atop an apartment block – able to autonomously repair cracks or leaks and clear leaves from the gutters … ” (Poole, Citation2014).
“Across many cities in the USA, an abandoned homeless population is subject to draconian anti–homeless laws and hostile urban architecture … In the atmospheres of this desperate city, hyper-mobile police drones will surround and enter the homes of suspects, in a manhunt in which the human is transformed into an abstract pattern of life” (Shaw, Citation2016).
1. Introduction
The fourth industrial revolution of robotic and automation technologies (4IR) is moving from science fiction and R&D to reality. Enabled by vast increases in computing capacity, burgeoning data harvested through powerful algorithms embedded in digital platforms, advanced material developments and urban connectivity – the capability of machines is expanding across all facets of the economy and throughout everyday life (Chui et al., Citation2018). Technological developments open up new horizons for vastly extended application of robotics and automation in production, but also beyond the factory (Marvin, While, Kovacic, Lockhart, & Macrorie, Citation2018a). Building on the digital turn (Ash, Kitchin, & Leszczynski, Citation2018), and mediation of the city through corporate data platforms (e.g. Barns, Citation2014, Citation2018; Plantin, Lagoze, Edwards, & Sandvig, Citation2016), the increasing presence of robotics and automation systems will uniquely (re)shape the logics, materialities, practices, processes and affects of the urban context.
There is now a growing body of literature on the implications of aspects of automation and robotics for cities specifically focused on urban surveillance, social and ethnic profiling and algorithmic governance, or the opportunities and challenges presented by driverless cars (Autonomous Vehicles – AVs) and drones (Unmanned Autonomous Vehicles – UAVs). However, the tendency has been to look at discrete applications of these technologies rather than possibilities for more systemic robotic and automated restructuring of the city. There is also scope for urban studies to engage with wider literature on applications that are not specifically city focused, but which have potential urban implications, health care for instance. Increasingly research work is focusing on wider societal implications of robotics and automation including labor (Acemoglu & Restrepo, Citation2017; Campolo et al., Citation2017), the economy (McKinsey Global Institute [MGI], Citation2017), democracy (Bartlett, Citation2018), and ethics and governance (Campolo et al., Citation2017). Yet, so far there has been little focus on perspectives that consider robotics and automation across different urban domains, or examine the full potential (and limitations) of these technologies to address contemporary urban issues (cf. Krivý, Citation2018; Leszcynski, Citation2016; Citation2019; Nagenborg, Citation2018).
Given these gaps, the following paper investigates why researchers, practitioners and policy-makers within the Urban Studies community need to be urgently and critically concerned with these technological developments. Our central argument is that new generation robotics and automation – by which we mean the recent intensification of in situ trials and implementation of automation, autonomous systems and robotics within cities – represent a potentially powerful new mode of urban restructuring, where life is shaped by extended and expanded robotic and automation possibilities, and contrasting urban contexts lead to experimentation with distinctive ensembles of technologies. Recognizing the precursor digital infrastructures and urban forms on which this mode of socio-spatial development depends, we advocate that a “whole city” perspective is needed to grasp the full significance of robotics and automation early in their co-evolution.
The paper is, therefore, structured as follows. First, we examine the development of new robotic and automation technologies, using the established engineering term “Robotics and Autonomous Systems” (RAS). Second, we examine why RAS constitutes an urban issue, how RAS technologies uniquely restructure the city in multiple ways, and how concurrently everyday processes shape urban RAS meanings, modalities and implications. We develop an analytical framework to map these emerging sites, domains and infrastructural combinations, advocating a blended, urban perspective for understanding human-machine interactions. Third, this reveals an urgent research agenda necessary to appreciate the transformative potential and implications of the robotic and automated city. Finally, we conclude by summarizing the distinctive contribution of the paper.
2. Contemporary robotics and automation: claims and concerns
The permeation of automation throughout modern society is described by four waves of technological development. Electric power enabled the first wave of industrial automation (from circa. 1950s) which was exemplified by sophisticated assembly line robots and mass production (Bennett, Citation1996). Advances from analog electronic and mechanical devices to the digital technologies found in human-machine systems today emerged from the 1980s onwards. Building on growing levels of digital connectivity, new materials and advanced manufacturing, today the “Fourth Industrial Revolution” is marked by technological breakthroughs across; robotics, artificial intelligence (AI), nanotechnology, quantum computing, biotechnologies, the Internet of Things (IoT), 3D printing and autonomous vehicles. 4IR is “characterised by a fusion of technologies that [blur] the lines between the physical, digital, and biological spheres” (Schwab, Citation2015). Collectively these developments are delivering a “Cambrian Explosion” in automation and robotics, producing technologies with diverse applications, are networked, and work closely with people (Winfield, Citation2014, p. 38). Indeed, there is already talk of an Industry 5.0 focussed on “combining human beings’ creativity and craftsmanship with the speed, productivity and consistency of robots” (European Economic and Social Committee, Citation2018).
The role of robotics and autonomous systems in social life is at an early stage and may initially appear restricted, in part because concerns about health, safety and security have limited possibilities for real-world experimentation outside the controlled environment of factories and laboratories. The temptation is to consider these systems as science fiction for some distant future. Yet, large-scale and real-time automated calculative processes already sit behind and inform decision-making across many facets of society, for example; trading, retail, logistics, engineering, transport management, resource extraction, hospital operations, security, etc. Additionally, some applications, such as new forms of surveillance, are undertaken hidden from view. Progress in software, hardware and materials development, pervasive digital WiFi networks, information-gathering ICTs (sensors and remote control capabilities) and global positioning systems (GPS), when coupled with advances in necessary infrastructural support systems, are enabling uniquely new and diverse “Robotics and Autonomous Systems” (RAS) applications throughout economic and social life (e.g. Kovacic, Citation2018; Nagenborg, Citation2018). Besides having processing power, RAS can sense their environment, make autonomous decisions, and allow for physical activity via actuators. They therefore “enable the collection of data … analysis of data (e.g. via artificial intelligence) and … making of real time interventions in the real world” (van Est, Bunders, & Korthagen, Citation2017). We use the established engineering term “Robotics and Autonomous Systems” (RAS) to describe the full complement of automated and autonomous systems, robotics and AI being developed and applied to address contemporary urban challenges (Marvin et al., Citation2018a).
Drones and UAVs have extended possibilities for rapid service delivery, surveillance and remote policing (Bamburry, Citation2015; Wall, Citation2016). AVs have profound implications for individual mobility, access to road infrastructure and the design and layout of cities (Thrun, Citation2010; although see Bissell, Citation2018; Stilgoe, Citation2018). Assistive and customer service robots in social care, education and retail are altering how citizens experience our environment, interact and learn (Kovacic, Citation2018; Prescott & Caleb-Solly, Citation2017). The collection and analysis of “big data” using powerful algorithms and biometric platforms is revolutionizing governance systems (e.g. China’s credit scoring system – Botsman, Citation2017). Robots are helping manufacture the built environment and repair infrastructures in situ (e.g. Ardiny, Witwicki, & Mondada, Citation2015; Self Repairing Cities, Citation2018). This technological diversity holds tremendous prospect for the augmentation of societal tasks that are highly complex (e.g. diagnosing medical conditions, analyzing vast real-time data), precise (e.g. manufacturing), powerful (e.g. calculation and prediction), unattractive and repetitive (e.g. maintenance) or dangerous (e.g. bomb disposal). Automated and robotic processes are also claimed to be easier to manage, more dependable and productive than human labor (MGI, Citation2017). Consequently, claims abound that 4IR RAS technologies represent “a fundamental change in the way we live, work, and relate to one another … The speed, breadth, and depth of this revolution are forcing us to rethink how countries should develop, how organisations create value, and even what it means to be human” (World Economic Forum [WEF], Citation2019). Indeed, RAS developments are lauded as providing “an opportunity to help everyone … to harness technologies … to create an inclusive, human-centred future” (UNIDO, Citation2017, p. 49).
Despite these claims, beyond prevalent analyzes of technological refinement, labor and economic implications – it is estimated that by the mid-2030s, up to 30% of jobs could be automatable (PwC, Citation2018) – and ensuring public safety, cybersecurity and privacy through legislation and certification (e.g. Boden et al., Citation2016; Leenes et al., Citation2017), there is an urgent need to examine how phenomena, such as widening global inequalities, intensifying geopolitical power and populist political movements will shape and be configured by the implementation of RAS technologies (Campolo et al., Citation2017).
RAS technologies raise concerns about extended social control and surveillance. Arising from the military influence on computing development and the recent commercialization of networked technologies, surveillance has become a key feature of modern life. Large banks of collected personal data that can be stored, matched, retrieved, processed, targeted and circulated have the capacity to channel consumer choices and direct desires. Surveillance is also increasingly prominent in policing and security strategies, “where it has the capacity to reinforce social and economic divisions … and even, at its sharp end, to constrain and control” (Lyon, Citation2001, p. 2). The extension of RAS technologies into the city would build upon and extend these capabilities (e.g. Crampton, Citation2019). New generation RAS technologies present “deep normative and ethical challenges for our existing social, economic and political relationships and institutions” (Campolo et al., Citation2017, p. 3).
Conceptually, the incorporation of RAS technologies across different city spheres can be understood as a blending of human-machine intelligence in urban socio-technical systems (Gandy, Citation2005; Guo, Chen, Yu, Zhang, & Zhou, Citation2015). Delegating control from the user to RAS blurs boundaries between humans, technology, data and physical infrastructures to potentially create new synthetic hybrids or “urban cyborgs” (Gandy, Citation2005), coded and augmented spaces (Kitchin & Perng, Citation2016), and new individual and collective identities (Bennett & Segerberg, Citation2012). This blurring appears particularly acute as RAS technologies increasingly: mediate urban spaces; augment everyday experiences; operate with enhanced autonomy, and develop processing abilities, physical strength and resilience exceeding human capabilities. It is critical to consider whether, when and how machines should be used to make decisions about human lives, whose values should guide those decisions, and to acknowledge biases inherent to the design of algorithmic code, data collection and analysis, RAS facilitated decision-making (Campolo et al., Citation2017). The physical visibility or invisibility of RAS technologies, and how they govern society and shape everyday lives, requires critical ethical scrutiny (cf. Sharkey & Sharkey, Citation2012). Urban research needs to understand how these enhanced calculative processes and physical abilities will (re)configure or reinforce societal governance approaches, human experiences and interactions, and societal in/equalities within and beyond cities.
3. Robotic and automated restructuring of the city
It has been argued that contemporary cities are becoming “a distributed robot, a collection of sensors and functions linked through invisible networks of communication” (Jacob, Citation2015). The extended and expanded abilities that this enables represent a distinctive shift from previous incarnations of technologically-mediated urbanism. However, attention has so far largely concentrated on appraising the development and anticipated benefits and concerns around; discrete technological developments, such as drone technology (Floreano & Wood, Citation2015; van Wynsberghe, Soesilo, Thomasen, & Sharkey, Citation2018), the future of particular sectors such as mobility (McKinsey and Bloomberg, Citation2016) or social care (Prescott & Caleb-Solly, Citation2017), or concerns such as labor (PwC, Citation2018) or ethics (Gunkel, Citation2012), often failing to connect to wider academic and policy debates or societal issues (cf. Campolo et al., Citation2017; Krivý, Citation2018; Leszczynski, Citation2016; Nagenborg, Citation2018; van Est et al., Citation2017). Taking a more systemic view, and examining the emerging distributed landscape and role of RAS technologies in cities, we can distinguish between:
Automated system management – technologies that seek to replace, reduce, supplement, enhance, extend and/or simplify human calculation and/or control in the management of systems underpinning the functionality of the city, and
Robotization of urban services – the deployment of mobile-controlled and partially autonomous devices (robots and automatons) that replace, augment or extend existing approaches by enabling tasks that are too dangerous, repetitive or monotonous for humans, or that require strength or precision beyond human capabilities (see ).
Table 1. Robotic applications in the urban context
Rather than seeing these two dimensions as separate, we suggest that automated systems management and the robotization of urban services should be understood as operating together across multiple domains of urban life. In light of reduced risk, as governments work with technology companies to embed these developments, updated legal frameworks and growing global investments in this industry, RAS test-beds and urban living labs will grow in number, sectoral spread, geographic range and size, and automated urban networks will expand, overlap and interconnect. Together, these transformations create possibilities for extended urban ecosystems of automation and robotics (Hunt, Citation2018). The perception that RAS technologies are distanced from everyday life will change rapidly as this steady shift becomes more apparent.
Such techno-optimistic transformations are, to some extent, anticipated by discussions of digital technologies that are intended to smooth urban flows and transform public service management, encourage more participatory and transparent urban governance (Barns, Cosgrave, Acuto, & McNeil, Citation2017; Barns, Citation2018; Krivy, Citation2016; Luque-Ayala & Marvin, Citation2015; Marvin, Luque-Ayala, & McFarlane, Citation2016; Shelton, Zook, & Wiig, Citation2015) and new spatial media technologies in the city (Crampton, Citation2009; Leszczynski & Elwood, Citation2015). RAS functionalities certainly depend on and extend demand for the “digital skin” of the city, comprising networks of hidden cables, sensors and mobile devices capable of geo-location and automated processing (Rabari & Storper, Citation2015). RAS technologies and systems are likely to be entwined with the logics (and often the value-extractive proprietary mechanisms) of digital platform-based infrastructures and services in the urban context (e.g. Barns, Citation2014, Citation2018; Leszczynski, Citation2016, Citation2019; Plantin et al., Citation2016; Richardson, Citation2017; Srnicek, Citation2017).
However, the range and sophistication of urban RAS technologies and their affordances constitute a more substantial reworking of city processes, materialities and experiences than currently accounted for by existing forms of urbanism (whilst clearly strong interdependencies and overlaps exist). In addition, eco-systemic urban dynamics are being produced as automated system management and the roboticization of urban services is brought together. Urban RAS interventions we argue reach beyond existing technologically mediated urbanism in three ways.
First, managerial ambitions of urban RAS implementation go beyond that of more efficient municipal planning and governance. The increasing scope and interconnections between RAS urban applications distinctly rework, augment, and extend the capabilities and capacities of infrastructure networks. Together RAS technologies offer new opportunities for: powerful calculative processing; surveillance, biometric identification and geo-location; and remote functionality and autonomous actuation (e.g. UAVs, AVs, social and maintenance robots). These innovations are being applied to address challenges across a wide range of urban domains – mobility (AVs and UAVs), health (telecare, surgical and companion robots), service robots (e.g. restaurant waiters), logistics, surveillance and security, etc. For example, Japan aims to be the first society to integrate robots into all sectors of the economy (Robot Revolution Realization Council [RRRC], Citation2015), whilst Dubai (UAE) is intensively robotizing public services, transportation, policing and surveillance to create the “happiest city on Earth” (Kovacic, Citation2018).
Second, RAS technologies treat the city as a distributed autonomous system by delegating specific tasks to powerful algorithmic processes. If “smart” technologies embody a computational logic whereby computers are programmed to perform tasks, autonomous systems use techniques such as visual perception, speech and natural language processing, AI and machine learning. These sophisticated abilities move RAS technologies beyond smart by providing the potential for autonomous pattern recognition and ability to make the decision to change a process without human agency. Concurrently, this aptitude necessitates greater task and infrastructural specificity for technologically mediated urban development. For example, Leeds (UK) aims to become “the first city in the world that is fully maintained autonomously by 2035” (Self Repairing Cities, Citation2018), whilst China’s social credit system, on track for full deployment to 1.4 billion citizens by 2020, aims to centralize data platforms and facial recognition software to produce a big data-enabled state surveillance infrastructure (Liang, Das, Kostyuk, & Hussain, Citation2018).
Third, advanced robots and robotic systems introduce actuation – the capacity to physically act or move. Developments including new sensors, automated mission planning software, distributed robotic control, and more efficient power systems deliver technological capabilities and capacities beyond human abilities and existing infrastructural possibilities (by enabling greater precision, strength, dependability, speed and endurance, etc.). As RAS technology becomes simultaneously more capable and economically viable, complex urban tasks can be carried out remotely and support new urban applications, including accessing previously inaccessible areas or performing operations considered as dangerous to human life. For example, drones are being used to inspect confined and inaccessible places safely (e.g. Flyability, Citation2019) and Amazon Prime Air aims to deliver packages up to five pounds in weight in less than 30 min using small drones (Wilke, Citation2019).
RAS technologies may provide opportunities for the extension of human and infrastructural capabilities, greater autonomous operation (and learning), and reworking of service provision through new forms of robotically mediated infrastructure, but they also have distinct implications, which have not yet been fully worked through. Importantly, more than the city providing a context for RAS trials, the urban constitutes the nature, forms and outcomes of robotics and automation systems. Whilst RAS technologies are shaping city spaces, practices, processes, materiality, everyday encounters and realized experiences, the city and its citizens simultaneously influence the logics, operation and implications of RAS technologies through their perceptions, engagement or resistances. These dynamics result in the ongoing RAS restructuring of the city.
Robotics and automation now necessarily form part of a critical urban research agenda. However, Urban Studies currently lack a conceptual lens to understand the rationale and processes through which this phenomenon is constituted, or to anticipate the socio-political implications of RAS implementation. Recognizing this gap, the pace of change and the increasing global (whilst often highly localized) spread of RAS developments, below we propose an analytical framework to map and understand the emergence of contrasting and overlapping modes of robotics and automation. This helps to explain how RAS technologies are (re)shaping, and themselves being (re)made, through urban processes, and to anticipate the wider consequences of this critical contemporary phenomenon (see ).
Figure 1. Analytical framework mapping the emerging logics of urban RAS technologies
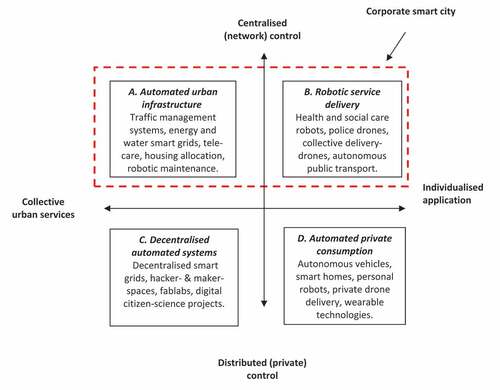
The analytical framework is based around the strategic positioning of RAS technologies in relation to logics of centralized (network-mediated) and distributed (or private) control, and their ability to address collective urban services (e.g. traffic flow, street lighting, policing) or provide individualized application(s). The X–axis contrasts the management of urban infrastructures of resource management for collective service provision (i.e. to enhance systemic efficiency) with RAS technologies that allow for individualized requirements. The Y–axis describes the mode of control and extent to which citizens can influence (and opt in or out of) their engagement with RAS technologies (ranging from centralized network control to distributed private control). The grid highlights the distinction between a “corporate” smart city model (top half) and the extension of RAS technologies through private consumption markets (bottom half). The corporate vision is concerned with maintenance and enhancement of city-wide systems, including elements of tailored individualized services. Individual control is strongest in private systems tailored to particular consumers. Division of labor between collective and private smart city restructuring, and whether these processes are centralized or more distributed, will depend on the prevailing and unfolding responsibilities and requirements for different urban infrastructures in certain contexts. Distinguishing between these emerging logics, the grid is populated with four emblematic sites of unfolding urban experimentation in RAS technologies.
3.1. Automated urban infrastructure
In the RAS restructured city, real-time information and predictive analytics present possibilities for radical extensions of networked digital infrastructures. RAS technologies enable complex system management in the context of vastly increased digital data, whilst algorithmic models enhance monitoring and predictive capabilities. Urban flows of people, traffic and resources are thus managed in: automated street lighting (Pink & Sumartojo, Citation2017), traffic control systems (Lyons, Citation2018), and surveillance systems (Aravindan & Geddie, Citation2018). Seeking to minimize disruption, increase efficiency, and optimize network capacity, these developments enable autonomous control systems to manage urban processes with minimal human agency. The automated expert-system is exemplified by the “centralised control room” (e.g. Kitchin, Citation2014; Luque-Ayala & Marvin, Citation2016; Marvin and Luque-Alaya Citation2017), which requires subordination of personal choice to the logic of the networked system. We position automated infrastructure system control in the corporate smart city (indicated by a dashed line) because it is concerned with collective management, and in many respects, the UA agenda fits the interests of “smart cities”. However, incorporating contemporary developments in RAS, the automated management of urban infrastructure provides a specificity and focus often lacking in the smart city approach (Marvin et al., Citation2018a).
For example, the Chinese e-commerce giant Alibaba’s City Brain uses AI to gather information across the city of Hangzhou, such as video from intersection cameras and GPS data on the locations of cars and buses, and analyzing information in real-time, coordinates over one thousand road signals to ease traffic congestion (Toh & Erasmus, Citation2019). This functionality goes beyond “smart” monitoring systems; the “comprehensive cognition” of the City Brain instantly detects crashes, blockages or parking violations and automatically notifies the police. The platform predicts traffic flow 10 min ahead of time with 90% accuracy, and texts people to help them plan different routes. But the City Brain has a darker side in this authoritarian capitalist regime as its huge data resource can be used to identify and track “non-normal” behavior patterns enabling state control (Revell, Citation2017). When RAS technologies in this quadrant are used for surveillance and predictive policing purposes, concerns arise about inherent biases these systems are algorithmically taught to “know” and implications individual profiling. For example, the 2016 Pro Publica investigation into racially biased policing practices of COMPAS software discriminated against black defendants by deeming them more likely to reoffend (Angin, Larson, Mattu, & Kirchner, Citation2016).
Such biases extend outside of policing and justice to seemingly more innocuous urban domains. Terming them “new tools of digital poverty management”, Eubanks (Citation2018, p. 25) describes how automated eligibility and ranking algorithms privilege certain users based on their personal characteristics, to govern access to and monitor usage of, public services including welfare benefits, social housing and medical care (also Gibson & Hayes, Citation2019). For example, the State of Indiana denied one million applications for health care, food stamps and cash benefits over 3 years because a new computer system interpreted any application mistake as “failure to cooperate”. Such processes “automate inequality” (Eubanks, Citation2018) and create “software-sorted geographies” (Graham, Citation2005), that have real, and potentially devastating, effects on peoples’ everyday lives. Consequently, whilst we situate this form of RAS development in the corporate city, the outcomes of such collective management may not be equitable.
The question is whether automated urban infrastructural developments fundamentally change how governance is practiced; whereby rather than directly governing resources for communities, decisions are made based on aggregated big data, real-time data analytics and short-term algorithmic forecasting. It is important to analyze what this means for the; private ownership of public data; notions of urban citizenship; and for the amplification of inherent biases, societal control and urban inequalities.
3.2. Robotic service delivery
Experiments are underway for remotely controlled robotic devices, drones and AVs to provide services across urban domains, for example, in customer service, logistics, policing and security, education and health and social care (see ). These innovations are designed to free up time, save money, provide control, enable precision and strength and to be tailored to our personal needs. For example, Unmanned Aerial Vehicles (UAVs) (or drones) can exploit urban airspace for the efficient delivery of goods in congested urban environments (Marvin et al., Citation2018a; Wilke, Citation2019). And urban robot experimentation in Dubai (UAE) and China reveals how “… authoritarian state regimes are finding innovative ways to use robots in public services, transportation, policing and surveillance” (Kovacic, Citation2018). The Dubai Police force has already deployed robot police on the street – “the friendly robot, which can salute and shake hands”, can be used by the public to report crimes, complete paperwork and pay traffic fines (Molloy, Citation2017). The ambition is to have 25% of the force comprising robotic officers by 2030 (ibid.).
Robots also have a role to play in creating a “connected care ecosystem linking home, residential and hospital care as a continuum” (Prescott & Caleb-Solly, Citation2017: Introduction), where patient specificity is often paramount. For example, Latrobe University (Australia) has developed socially assistive robots to aid persons with Dementia and their caregivers in home-based and residential care. Able to collect context- and location-based data (verbal, non-verbal, multimedia and sensory-based) the robots can deliver personalized and interactive services, such as; singing and dancing to songs, video streaming, quizzes, and storytelling (Khosla, Nguyen, & Chu, Citation2016). We situate these networked robotic applications at the spectrum of personalized services, but in the quadrant of centralized control (top right quadrant of ). This is because such experiments tend to be individually prescribed (or purchased), and largely configured for the user within a range of pre-sets. Although citizens will need to engage with some aspects of automation to reflect their unique needs, control will be exercised centrally by organizations responsible for collective provision.
Globally cities are in an early phase of robotic development and it remains difficult to predict how robots will be integrated into the urban context (Nagenborg, Citation2018); some experiments will remain as R&D trials, but urban-testing also acts as a promotional strategy for companies, cities and states alike (Kovacic, Citation2018). Despite possible benefits, significant ethical and moral concerns are associated with human-robot interactions. Debating the use of robots in elder care, Sharkey and Sharkey (Citation2012) highlight concerns around user experiences: (a) a potential reduction in human contact; (b) increased feelings of objectification and loss of control; (c) loss of privacy; (d) loss of personal liberty; (e) deception and infantilization; and (f) circumstances in which elderly people should be allowed to control robots. “While robots may facilitate patient monitoring and help with physical tasks, arguably there can be no replacement for human emotional connection and sensitivities” (Macrorie, Citation2018).
Moreover, hidden human labor often sits behind urban robotically delivered services – most notable within automated logistics (e.g. Amazon and Deliveroo). Operating as “pickers” of barcoded products in high throughput roboticized distribution warehouses, or performing repetitive and poorly paid “clickwork” (e.g. Amazon Mechanical Turk), such a “flexible, scaleable workforce sit outside of the traditional boundaries of labour laws and regulation” (e.g. Sadowski, Citation2018; Bergvall-Kåreborn & Howcroft, Citation2014, p. 213). In the context of a capitalist political economy, automated logistics services are increasingly powered by poor and migrant labor, and rely on “human beings [being] treated as robots” (Bloodworth, Citation2018). Robotic systems, therefore, raise questions related to; social control, societal relations, and hidden labor costs.
3.3. Decentralized automated systems
Whilst often overlooked, RAS experiments can work through decentralized and perhaps more modest socio-technical community interventions (bottom left quadrant). Often RAS experiments in this quadrant are developed in response to perceived deficiencies in networked infrastructures, limitations in centralized solutions, or urban challenges at localized sites. Typical initiatives range from maker-spaces, hacker-spaces and fablabs, to social media crowd-sourcing campaigns for the community, digital citizen-science projects and digital platforms for urban democracy, and they commonly seek to enhance social capital and empower citizens to act. For example, as Smith (Citation2018) describes how, as part of the “Making Sense” project, in early 2017, neighbors living around the Plaça del Sol (Barcelona) were provided with automated sensing tools by a group of activists to measure noise levels in a bustling city square, compare them with officially permissible levels with the intention of reducing noise pollution. With this data, noise was no longer a concern affecting individual residential properties, but became a collective issue. Beyond these decentralized automated systems and datasets, however, to mobilize political action to improve networked city infrastructure, old-fashioned, street-level skills in community development, lying beyond the remit of technology vendors, proved essential (ibid.).
When considering the collective issue of public safety, Microsoft’s Pedestrian Route Production patent, dubbed the “Avoid Ghetto GPS” envisioned map-based services that would take into account “user history, weather information, crime statistics, demographic information, etc.,” and dynamically recalculate directions to optimize city travel (Tashev et al., Citation2012, n. p.). More subjectively, safety apps, such as “SketchFactor” and Ghetto Tracker, allow users to report their (perceived) experiences to build a picture of certain neighborhoods for other users (Leszczysnki, Citation2016). Such, rerouting of pedestrians around neighborhoods deemed unsafe indirectly designates racialized and ethnic-minoritized poor inner-city spaces and the bodies thought to populate them (ibid.).
Arguably, to cultivate community, safe neighborhoods, and urban citizenship requires skillful local political skills, substantial resources and commitment to embed the potential benefits of decentralized automated technologies into the everyday fabric of urban life (Smith, Citation2018). Developing such technologies, for example, through incubator competitions, can potentially absolve municipalities of the responsibility to provide urban services. In addition, algorithms underpinning these RAS innovations, and their application, can be as (or more) infused with bias as corporate/municipally developed automated infrastructures.
3.4. Automated private consumption
Many of the technologies mapped under the bottom right-hand quadrant are being developed and marketed by smart corporate technology companies for private consumer markets. RAS experiments in this quadrant relate to user configuration, bespoke products and individualized service provision. Our everyday lives are becoming more intelligent, connected and personalized through integrated AI, voice control and other innovative RAS technologies intended for ease, comfort and convenience. Key examples are; the automated energy and environmental control of houses and consumer goods (e.g. Strengers, Citation2013), virtual home assistants (e.g. Amazon Alexa, Google Home, Samsung’s Bixby), personal robots and biometric wearable technologies (Greenfield, Citation2017), autonomous vehicles (Bissell, Citation2018; Stilgoe, Citation2018) and automated domestic security systems (Atkinson, Citation2016). Whilst within this realm there will be different degrees of individual control, these technologies are about satisfying individual preferences and maintaining personal urban (social and ecological) security. Thus, Atkinson (Citation2016) describes how automated domestic security systems (including alarms and panic buttons) are relied upon by the super-rich to ensure “private withdrawal and shielded mobility” from the unpredictability of the city, leading to segregated enclaves. Contrastingly Google Home and Google Assistant claim to help those with physical disabilities feel included and gain autonomy in their daily activities by “adapting the last mile to the special ability each one of us has” (Caggioni, Citation2019).
Issues in this fourth quadrant relate to; the state regulation of privatized systems that may exclude or discriminate (e.g. security systems or smart energy technologies). For example, Strengers (Citation2013, p. 32) uses the “Resource Man” analogy to describe the goal underpinning many smart energy technologies – for householders to act as active micro-resource managers, while also passively assigning management to smart technologies. Not only is this assumption heavily gendered and rationalizing, but smart technologies also raise concerns in terms of data ownership and security. Additional concerns include possible conflicts between personal and collective networks of provision (e.g. delivery drones), and the extent to which personalized and private investments (i.e. the private smart city as opposed to the corporate smart city) reinforce social and spatial inequalities.
To some degree, the axes artificially divide the urban RAS technological ecosystem because interventions continuously evolve and intersect. Currently, the different elements mapped onto the grid are separate areas of experimentation enabled by new RAS technologies and logics of real-time monitoring and prediction. The eco-systemic moment arises when these different sites are linked, coordinated and coalesce reworking governance, human agency and experiences within an extended ecosystem of urban RAS networks – for example, when the automated choices of driverless vehicles are partially controlled by the automated city-wide infrastructure network, or smart home automation is linked to real-time management of the energy distribution grid. Such eco-systemic urban RAS interactions may stimulate new forms of integrated infrastructure(s) throughout the city – for example, individuals may be able to pay for privileged access within public automated infrastructure. In this respect, robotics and automation (like privatization or liberalization) will enable new bundles, configurations and logics of access, control and profit within urban infrastructures and the city. Alternatively, however, RAS technologies could present possibilities for new forms of urban infrastructural unbundling and “splintering” (Graham & Marvin, Citation2001).
4. A research agenda for urban robotics and automation
Urban contexts are being actively targeted for RAS applications yet we minimally understand the emerging metropolitan landscape and what these developments might cumulatively and strategically mean for city life. A critical research agenda would focus on four sets of issues:
4.1. The urban geography of RAS implementation
The transitional phase of urban restructuring through RAS technologies is unlikely to affect all cities in the same way at the same time. Urban responses will be shaped by the capacity of places to invest in new technologies and the capability and willingness of urban leaders to facilitate extended applications of expensive RAS infrastructure networks in different domains. Technology firms and consultants might also prefer to operate in some cities responding to particular urban challenges, regulatory frameworks, governmental support or reputational value (Marvin et al., Citation2018a).
Key international sites where RAS interventions have become a strategic innovation and infrastructure priority for national governments include those striving to be the most – “smart” (Dubai & Singapore); robotized (Japan, South Korea); artificially intelligent (China); and AV-friendly (UK, California, USA) (Marvin et al., Citation2018a). Notably, the RAS industry is dominated by corporates from developed countries, whilst wealthy nations can explore future markets; this leads to questions about how urban RAS technologies, labor and wealth will be distributed at a geopolitical level. For example, recent research examines how Kenya, Tanzania and Rwanda have allowed the use of commercial drones leading robotics companies from Europe and the US to intensively enter the (deregulated) African aerial space (Marvin & Luque-Ayala, Citation2017).
There is a need to understand how cities positioned as protected “test-beds” for urban RAS applications facilitate experimental learning and develop strategic capacity, to ensure continued urban reproduction (Marvin et al., Citation2018a; Marvin, Bulkley, Mai, McCormick, & Vovtenko Palgan, Citation2018b). First, protective urban spaces will be created within which trials can occur (private/state-owned spaces where legal constraints can be exceeded, e.g. Fukushima Robot Test Field in Japan – METI, Citation2018). Second, the logics, knowledge and practices related to RAS technologies, previously only present within the lab or factory, will transmute into urban areas (e.g. defense industry innovations, such as global positioning system (GPS), have become commonly used across the urban context – Graham, Citation2011). Third, RAS initiatives will be implemented to transcend locally unproductive or threatening conditions and create new synthetic environments to guarantee a continued or improved context for particular urban activities (e.g. Marvin & Rutherford, Citation2018; Self-Repairing Cities, Citation2018).
More than cities providing a context for RAS experiments, these innovations will in part be constituted through the city in which they are trialed. As Wajcman (Citation2017) explains, robotics and automation are shaped by their socio-material, institutional and regulatory context and enactment. Cities and their citizens will be more or less resistant to new automated and robotic infrastructure. RAS urban interventions have notably been contested in San Francisco, California where protesters disrupted Google buses ferrying employees to Silicon Valley to highlight escalating house prices and question corporate rationales (Gumbel, Citation2014) and in Chandler, Arizona where Waymo self-driving cars were attacked in protest at the ever-increasing reach of AI, threats to safety and job losses (Romero, Citation2018). Such responses raise context-specific questions including why, by whom, and for whom are RAS interventions being developed and reappropriated, what are the implications of RAS trials for city planning, and will RAS-enabled cities be designed to meet societal needs, optimize machine functionality and/or extract value?
4.2. Selective RAS enhancement of citizens and infrastructure networks
It is necessary to investigate how urban RAS interventions reconfigure boundaries between human and machine decision-making and how this re(shapes) our capabilities and opportunities as individuals, part of society and urban networks, and within urban governance regimes. At the individual level, new combinations of humans, technologies and infrastructures create synthetic hybrids that are remaking ideas about what it means to be human (and the role of infrastructures). How will RAS-mediated processes and practices affect human skills and qualities such as patience, concentration, empathy, and what will this mean for our relations with one another? For example, research has found that smartphone dependency is already resulting in a diminished attention span, reduced memory and amplifying the need for instant gratification (Wilmer, Sherman, & Chein, Citation2017). As machines become increasingly intelligent and lifelike we need to understand; the moral, ethical and legal dilemmas this poses in terms of machine agency, how to delegate problem-solving and decision-making, whether we choose to actualize things usually beyond human capabilities (e.g. remote killing – Kaplan, Citation2018), and implications in terms of human (and robot) rights (e.g. an AI humanoid robot was recently granted citizenship in Saudi Arabia – Cutherbertson, Citation2018).
At a societal level, alongside the contemporary focus on the implications of RAS for labor and the economy, research needs to consider the possibility for enhanced centralized control over infrastructure networks and public services (with rationales of optimized security, resource flows and emergency response) (Schindler & Marvin, Citation2018). Utopian visions of transcendence and autonomy – social imaginaries of a seamless, safer and less complex life made possible through RAS developments – coexist with dystopian visions of increased securitization and automated state control. This reflects a double movement whereby robotics and automation could extend human capabilities and capacities, and/or remove human autonomy, reinforce extended surveillance and erode human rights. Relatedly, at a governance level, are RAS technologies viewed as libertarian or oppressive for society, and how will they (re)work urban governance regimes? This requires empirical analysis of why and how RAS technologies are taken up across different infrastructures and in different urban contexts.
4.3. RAS and the social sorting of cities
Third, urban research needs to examine how RAS technologies reinforce and replicate existing socio-spatial inequalities, segregations and exclusions, or create opportunities for more inclusive, socially-just and sustainable cities. Many aspects of RAS technologies have a promissory dimension in that they claim to be concerned with the making of new types of innovative future cities. Such socio-technical expectations shape urban applications of RAS, steer public and private investment, and influence the construction of markets and forms of regulation. Critical to understanding this is to examine whether urban RAS trials constitute global testbeds of living laboratories within existing infrastructural networks capable of enabling metropolitan transformation across urban geographies, or are leading to enclaves of experimentation and premium service delivery. This could turn smaller towns in many countries into automative and economic deserts, as more technology work concentrates in larger cities (Mendonca & Pramanik, Citation2018), polarizing society and exacerbating inequalities (UBS, Citation2016). Additionally, if new capacities of urban RAS are socio-spatially selective, will new rounds of more uneven services delivery be developed over existing networks? Crucial here is the extent to which automated processes of decision-making are programmed to software-sort different types of users, enhancing control and value for premium customers. Such automated sorting of infrastructural access and in/exclusion presents enhanced threats for splintered urbanism and urban inequalities.
4.4. Toward responsible urban innovation
Fourth, building on concepts of “Responsible Research and Innovation” (RRI) advocated by the European Commission (van den Hoven et al., Citation2013; von Schomberg, Citation2013), which requires the responsible design and use of technologies in the city, and following Nagenborg (Citation2018), we advocate the development and implementation of RAS technologies as “Responsible Urban Innovation”. Beyond RRI, RUI takes cities and their needs as the starting point for the design and application of RAS technologies. This may require the use of experimental “Urban Living Labs” (Bulkley et al., Citation2019) to identify relevant city challenges and explore, in situ and in collaboration with diverse stakeholders, how RAS technologies can serve public interests and enable transformations toward more sustainable, inclusive and equitable cities.
5. Conclusions
The urban context is now a critical site for the experimentation of new generation robotics and automation. The justification for this emergent trend is the claim that RAS technologies offer a superior form of decision-making and acting in the city that will help improve urban efficiency, augmenting and improving urban infrastructure, healthcare and everyday life. However, while RAS restructuring may bring significant benefits to aspects of urban life (and at least to some residents within some cities), it has the potential to reinforce and accelerate disadvantages and disparities within and between cities. It is critical that urban research subjects claims of the potential of RAS technologies to urgent scrutiny, so that informed choices can be made about which aspects of urban life should be automated or roboticized, and these developments can be managed and controlled within a framework of equitable and responsible innovation (Nagenborg, Citation2018).
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- Acemoglu, D, & Restrepo, P (2017). Robots and jobs: Evidence from US Labor Markets. NBER Working Papers 23285, National Bureau of Economic Research, Inc.
- Angin, J, Larson, J, Mattu, S, & Kirchner, L (2016, May 23). Machine Bias: There’s software used across the country to predict future criminals. And it’s biased against blacks. ProPublica. Retrieved from https://www.propublica.org/article/machine-bias-risk-assessments-in-criminal-sentencing
- Aravindan, A, & Geddie, J (2018). Singapore to test facial recognition on lampposts, stoking privacy fears. Reuters World News. Retrieved from https://www.reuters.com/article/us-singapore-surveillance/singapore-to-test-facial-recognition-on-lampposts-stoking-privacy-fears-idUSKBN1HK0RV
- Ardiny, H, Witwicki, SJ, & Mondada, F (2015) Construction automation with autonomous mobile robots: A review. 3rd RSI International Conference on Robotics and Mechatronics (ICROM), 7–8 October. Tehran, Iran: Tarbiat Modares University.
- Ash, J, Kitchin, R, & Leszczynski, A. (2018). Digital turn, digital geographies? Progress in Human Geography, 42(1), 25–43.
- Atkinson, R. (2016). Limited exposure: Social concealment, mobility and engagement with public space by the super-rich in London. Environment and Planning A: Economy and Space, 48(7), 1302–1317.
- Bamburry, D. (2015, July 23). Drones: Designed for product delivery. Design Management Institute (DMI) Review. Retrieved from https://www.dmi.org/.
- Barns, S (2014) Platform urbanism: The emerging politics of open data for urban management Paper presented at the Association of American Geographers Annual Meeting 08–12 April, Tampa, FL.
- Barns, S. (2018). Smart cities and urban data platforms: Designing interfaces for smart governance. City, Culture and Society, 12, 5–12.
- Barns, S, Cosgrave, E, Acuto, M, & McNeil, D. (2017). Digital infrastructures and urban governance. Urban Policy and Research, 35(1), 20–31.
- Bartlett, J. (2018). The people vs. tech: How the internet is killing democracy (and how we save it). London: Ebury Press.
- Bennett, S. (1996). A brief history of automatic control. IEEE Control Systems Magazine, 16(3), 17–25.
- Bennett, WL, & Segerberg, A. (2012). The logic of connective action: Digital media and the personalization of contentious politics. Information Communication and Society, 15(5), 739–768.
- Bergvall-Kåreborn, B, & Howcroft, D. (2014). Amazon mechanical Turk and the commodification of labour. New Technology, Work and Employment, 29(3), 213–223.
- Bissell, D. (2018). Automation interrupted: How autonomous vehicle accidents transform the material politics of automation. Political Geography, 65, 57–66.
- Bloodworth, J. (2018). Hired: Six months undercover in low wage Britain. London: Atlantic Books.
- Boden, M, Bryson, J, Caldwell, D, Dautenhahn, K, Edwards, L, Kember, S, … Winfield, A. (2016). Principles of robotics: Regulating robots in the real world. Connection Science, 29(2), 124–129.
- Botsman, R. (2017). Who can you trust? How technology brought us together and why it might drive us apart. London: Penguin Portfolio.
- Bulkley, H, Marvin, S, Voytenko Palgan, Y, McCormick, K, Breitfuss-Loidl, M, Mai, L, … Frantzeskaki, N. (2019). Urban living laboratories: Conducting the experimental city? European Urban and Regional Studies, 26(4), 317–335.
- Caggioni, L (2019, June). Project DIVA: Making the google assistant more accessible. Retrieved from https://experiments.withgoogle.com/project-diva
- Campolo, A, Sanfilippo, M, Whittaker, M, & Crawford, K (2017). AI now 2017 report. AI Now Institute. Retrieved from https://ainowinstitute.org/AI_Now_2017_Report.pdf
- Chui, M, Manyika, J, Miremadi, M, Henke, N, Chung, R, Nel, P, & Malhotra, S (2018, April). Notes from the AI frontier: Insights from hundreds of use cases. Discussion Paper. McKinsey Global Institute (MGI).
- Crampton, JW. (2009). Cartography: Maps 2.0. Progress in Human Geography, 33(1), 91–100.
- Crampton, JW. (2019). Platform biometrics. Surveillance & Society, 17(1/2), 54–62.
- Cutherbertson, A (2018, May 24). Robots will have civil rights by 2045, claims creator of ‘I will destroy humans’ android. The Independent. Retrieved from https://www.independent.co.uk/life-style/gadgets-and-tech/news/robots-civil-rights-android-artificial-intelligence-2045-destroy-humans-sophia-singularity-a8367331.html
- Eubanks, V. (2018). Automating inequality: How high-tech tools profile, police, and punish the poor. New York: St. Martin’s Press.
- European Economic and Social Committee. (2018, December 3). Industry 5.0 will bring about a new paradigm of cooperation between humans and machines. EESC. Retrieved from https://www.eesc.europa.eu/en/news-media/news/industry-50-will-bring-about-new-paradigm-cooperation-between-humans-and-machines
- Floreano, D, & Wood, RJ. (2015). Science, technology and the future of small autonomous drones. Nature, 521, 460–466.
- Flyability. (2019). Safe drones for inaccessible places: Inspect & explore indoors safely, quickly, & economically. Retrieved from https://www.flyability.com
- Gandy, M. (2005). Cyborg urbanization: Complexity and monstrosity in the contemporary city. International Journal of Urban and Regional Research, 29(1), 26–49.
- Gibson, S, & Hayes, J (2019). Review of evidence and priorities for AI in social housing, welfare and social care. AI in Housing Welfare and Social Care Network symposium July 19–20, 2019, Sheffield University.
- Graham, S. (2005). Software-sorted geographies. Progress in Human Geography, 29(5), 562–580.
- Graham, S. (2011). Cities under siege: The new military urbanism. London, New York: Verso.
- Graham, S, & Marvin, S. (2001). Splintering urbanism: Networked infrastructures, techno-logical mobilities and the urban condition. London: Routledge.
- Greenfield, A. (2017). Radical technologies. New York, London: Verso.
- Gumbel, A (2014, January 25). San Francisco’s guerrilla protest at Google buses swells into revolt. The Guardian. Retrieved from https://www.theguardian.com/world/2014/jan/25/google-bus-protest-swells-to-revolt-san-francisco
- Gunkel, DJ. (2012). The machine question: Critical perspectives on AI, robots and ethics. Cambridge, Massachusetts and London, England: MIT Press.
- Guo, B, Chen, C, Yu, Z, Zhang, D, & Zhou, X. (2015). Building human-machine intelligence in mobile crowd sensing. IT Professional, 17(3), 46–52.
- Hunt, E (2018, May 1). It’s like a robot playground’: The cities welcoming self-driving delivery droids. Guardian Cities. Retrieved from https://www.theguardian.com/cities/2018/may/01/what-the-hell-is-that-self-driving-delivery-robots-hit-london
- Jacob, S. (2015). Machines of loving grace: The city as a distributed robot & the omnipresent intelligence of data networks. Uncube, 36, 17–25.
- Kaplan, Z. A. (2018). R2d2 or irobot: Can armed robots be friend to police without being foe to the public. Notre Dame Journal of Law, Ethics Public Policy, 32(2), 603–634.
- Khosla, R, Nguyen, K, & Chu, MT. (2016). Socially assistive robot enabled personalised care for people with Dementia in Australian private homes. In J. Gołuchowski, M. Pańkowska, C. Barry, M. Lang, H. Linger, & C. Schneider Eds., Information systems development: Complexity in information systems development. ISD2016 Proceedings.
- Kitchin, R. (2014). The real-time city? Big data and smart urbanism. GeoJournal, 79(1), 1–14.
- Kitchin, R, & Perng, S-Y. (2016). Code and the city. Regions and cities. Abingdon and New York: Routledge.
- Kovacic, M. (2018, April 10). Robot cities: Three urban prototypes for future living. The Conversation. Retrieved from https://theconversation.com/robot-cities-three-urban-prototypes-for-future-living-90281
- Krivý, M. (2018). Towards a critique of cybernetic urbanism: The smart city and the society of control. Planning Theory, 17(1), 8–30.
- Krivy, M. (2016). Towards a critique of cybernetic urbanism: the smart city and the society of control. Planning Theory, 17(1), 8-30.
- Leenes, R, Palmerini, E, Koops, BJ, Bertolini, A, Salvini, P, & Lucivero, F. (2017). Regulatory challenges of robotics: Some guidelines for addressing legal and ethical issues. Law, Innovation and Technology, 9, 1–44.
- Leszczynski, A. (2016). Speculative futures: Cities, data, and governance beyond smart urbanism. Environment and Planning A, 48(9), 1691–1708.
- Leszczynski, A. (2019). Glitchy vignettes of platform urbanism. Environment and Planning D: Society and Space.
- Leszczynski, A, & Elwood, S. (2015). Feminist geographies of new spatial media. The Canadian Geographer, 59(1), 12–28.
- Liang, F, Das, V, Kostyuk, N, & Hussain, MM. (2018). Constructing a data-driven society: China’s social credit system as a state surveillance infrastructure. Policy and Internet, 20(4), 415–453.
- Luque-Ayala, A, & Marvin, S. (2015). Developing a critical understanding of smart urbanism? Urban Studies, 52, 2105–2116.
- Luque-Ayala, A, & Marvin, S. (2016). The maintenance of urban circulation: An operational logic of infrastructural control. Environment and Planning D: Society and Space, 34(2), 191–208.
- Lyon, D. (2001). Surveillance Society. Buckingham: Open University Press.
- Lyons, G. (2018). Getting smart about urban mobility – Aligning the paradigms of smart and sustainable. Transportation Research Part A, 115, 4–14.
- Macrorie, R (2018, July 12). Three ‘living labs’ which show how autonomous robots are changing cities. The Conversation. Retrieved from https://theconversation.com/three-living-labs-which-show-how-autonomous-robots-are-changing-cities-99477
- Marvin, S, Kovacic, M, & While, A. (2017). Drones/robotics and development priorities in Africa: Transformative infrastructure or digital colonisation. The British Academy Knowledge Frontiers Interdisciplinary Research Projects. Retrieved from https://www.thebritishacademy.ac.uk/projects/knowledge-frontiers-research-drones-robotics-development-priorities-africa
- Marvin, S, Bulkley, H, Mai, L, McCormick, K, & Vovtenko Palgan, Y. (2018b). Urban living labs: Experimenting with city futures. London: Routledge.
- Marvin, S, & Luque-Ayala, A. (2017). Urban operating systems: Diagramming the city. International Journal of Urban and Regional Research, 41(1), 84–103.
- Marvin, S, Luque-Ayala, A, & McFarlane, C. (2016). Smart urbanism: Utopian vision or false dawn? Edited by Marvin S, Luque-Ayala A and McFarlane C. Routledge, London: Routledge.
- Marvin, S, & Rutherford, J. (2018). Controlled environments: An urban research agenda on microclimatic enclosure. Urban Studies, 55(6), 1143–1162.
- Marvin, S, While, A, Kovacic, M, Lockhart, A, & Macrorie, R (2018a). Urban robotics and automation: Critical challenges, international experiments and transferable lessons for the UK. UK-RAS Network. ISSN 23984414. Retrieved from https://www.ukras.org
- McKinnon, AC. (2016). The possible impact of 3D printing drones on last-mile logistics: An exploratory study. Built Environment, 42(4), 617–629.
- McKinsey and Bloomberg. (2016, October). An integrated perspective on the future of mobility. McKinsey & Company and Bloomberg New Energy Finance. Retrieved from https://www.mckinsey.com/~/media/mckinsey/business%20functions/sustainability/our%20insights/an%20integrated%20perspective%20on%20the%20future%20of%20mobility/an-integrated-perspective-on-the-future-of-mobility.ashx
- McKinsey Global Institute. (2017, January). A future that works: Automation, employment and productivity. McKinsey & Company.
- Mendonca, J, & Pramanik, A (2018, February 21). Automation will amplify small cities’ job crisis: Capgemini CEO Paul Hermelin. The Economic Times. Retrieved from https://economictimes.indiatimes.com/industry/auto/auto-news/automation-will-amplify-small-cities-job-crisis-capgemini-ceo-paul-hermelin/articleshow/63006608.cms
- METI. (2018). Part of Fukushima robot test field to open: Worlds first test base for drone operation and long-distance flight control. Japan Ministry of Economy, Trade and Industry. Retrieved from https://www.meti.go.jp/english/press/2018/0719_002.html
- Molloy, M (2017, March 20). Real-life robocops will soon replace human police. The Telegraph. Retrieved from https://www.telegraph.co.uk/technology/2017/03/20/real-life-robocops-will-soon-replace-human-police/
- Nagatani, K, Kiribayashi, S, Okada, Y, Otake, K, Yoshida, K, Tadokoro, S, … Kawatsuma, S. (2013). Emergency response to the nuclear accident at the Fukushima Daiichi nuclear power plants using mobile rescue robots. Journal of Field Robotics, 30(1), 44–63.
- Nagenborg, MH. (2018). Urban robotics and responsible urban innovation. Ethics and Information Technology, 1–11. doi:10.1007/s10676-018-9446-8
- Pink, S, & Sumartojo, S. (2017). The lit world: Living with everyday urban automation. Social & Cultural Geography, 19(7), 833–852.
- Plantin, J-C, Lagoze, C., Edwards, PN, & Sandvig, C. (2016). Infrastructure studies meet platform studies in the age of Google and Facebook. New Media and Society, 2016, 1–18.
- Poole, S (2014, December 17). The truth about smart cities: ‘In the end, they will destroy democracy’. The Guardian. Retrieved from https://www.theguardian.com/cities/2014/dec/17/truth-smart-city-destroy-democracy-urban-thinkers-buzzphrase
- Prescott, TJ, & Caleb-Solly, P (2017). Robotics in social care: A connected care ecosystem for independent living. UK-RAS Network. ISSN 2398–4422. Retrieved from www.ukras.org
- PwC. (2018). Will robots really steal our jobs? An international analysis of the potential long-term impact of automation. Price Waterhouse Coopers LLP. Retrieved from https://www.pwc.co.uk/economic-services/assets/international-impact-of-automation-feb-2018.pdf
- Rabari, C, & Storper, M. (2015). The digital skin of cities: The age of the sensored and metered city, ubiquitous computing and big data. Cambridge Journal of Regions, Economy and Society, 8, 27–42.
- Revell, T (2017). China’s super-smart city tracks your every move. New Scientist. Retrieved from https://www.newscientist.com/article/2151297-a-smart-city-in-china-tracks-every-citizen-and-yours-could-too/
- Richardson, L (2017) Cultural economies of platform urbanism Paper presented at the toward a Platform Urbanism Agenda for Urban Studies, An International Workshop, Sheffield, UK: The University of Sheffield.
- Robot Revolution Realization Council. (2015, February 10). New robot strategy: Japan’s robot strategy. The Headquarters for Japan’s Economic Revitalization. Retrieved from https://www.meti.go.jp/english/press/2015/pdf/0123_01b.pdf
- Romero, S (2018, December 31). Wielding rocks and knives, Arizonans attack self-driving cars. The New York Times. Retrieved from https://www.nytimes.com/2018/12/31/us/waymo-self-driving-cars-arizona-attacks.html
- Sadowski, J (2018). Potemkin AI. Real Life Magazine [online]. Retrieved from http://reallifemag.com/potemkin-ai/
- Saripalli, S. (2017, October 6). Are self-driving cars the future of mobility for disabled people? The Conversation. Retrieved from https://theconversation.com/are-self-driving-cars-the-future-of-mobility-for-disabled-people-84037
- Sartorato, F, Przybylowski, L, & Sarko, DK. (2017). Improving therapeutic outcomes in autism spectrum disorders: Enhancing social communication and sensory processing through the use of interactive robots. Journal of Psychiatric Research, 90, 1 July 2017 1–11.
- Schindler, S, & Marvin, S. (2018). Constructing a universal logic of urban control: International standards for city data, management and interoperability. City, 22(2), 298–307.
- Schwab, K. (2015, December 12). The fourth industrial revolution: What it means and how to respond. Foreign Affairs. Retrieved from https://www.foreignaffairs.com/articles/2015-12-12/fourth-industrial-revolution
- Self Repairing Cities. (2018). Vision. Retrieved from http://selfrepairingcities.com/about/vision
- Sharkey, A, & Sharkey, N. (2012). Granny and the robots: Ethical issues in robot care for the elderly. Ethics and Information Technology, 14(1), 27–40.
- Shaw, IGR. (2016). The urbanization of drone warfare: Policing surplus populations in the dronepolis. Geographica Helvetica, 71, 19–28.
- Shelton, T, Zook, M, & Wiig, A. (2015). The ‘actually existing smart city.’. Cambridge Journal of Regions, Economy, and Society, 8, 13–25.
- Smith, A (2018,April 18). Smart cities need thick data, not big data. The Guardian. Retrieved from https://www.theguardian.com/science/political-science/2018/apr/18/smart-cities-need-thick-data-not-big-data
- Srnicek, N. (2017). Platform capitalism. Cambridge, Malden: Polity Press.
- Stilgoe, J. (2018). Machine learning, social learning and the governance of self-driving cars. Social Studies of Science, 48(1), 25–56.
- Strengers, Y. (2013). Smart energy technologies in everyday life: Smart Utopia? Basingstoke, UK and New York, NY: Palgrave Macmillan.
- Tashev, IJ, Couckuyt, JD, Black, NW, Krumm, JC, Panabaker, R, & Seltzer, ML. (2012). Pedestrian route production. Microsoft Corporation. Retrieved from https://www.google.com/patents/US8090532
- Thrun, S. (2010). Toward robotic cars. Communications of the ACM, 53(4), 99–106.
- Toh, M, & Erasmus, L (2019, January 15). Alibaba’s ‘City Brain’ is slashing congestion in its hometown. CNN Business. Retrieved from https://edition.cnn.com/2019/01/15/tech/alibaba-city-brain-hangzhou/index.html
- UBS. (2016). Extreme automation and connectivity: The global, regional and investment implications of the Fourth Industrial Revolution. UBS White Paper for the World Economic Forum Annual Meeting 2016 January 2016.
- UNIDO. (2017). Industry 4.0: Opportunities behind the challenge background paper. Retrieved from https://www.unido.org/sites/default/files/files/2017-11/UNIDO%20Background%20Paper%20on%20Industry%204.0_27112017.pdf
- van den Hoven, J., Jacob, K., Nielsen, L., Roure, F., Rudze, L., & Stilgoe, J. (2013). Options for strengthening responsible research and innovation. Brussels: Directorate-General for Research and Innovation, European Commission.
- van Est, R, Bunders, D, & Korthagen, (2017). Rise of robot city politic: The state of affairs in the Netherlands. Paper presented at the Urban Automation: An International Workshop, Sheffield, UK: The University of Sheffield.
- van Wynsberghe, A., Soesilo, D., Thomasen, K., & Sharkey, N. (2018). Drones in the service of society. Foundation for Responsible Robotics (FRR). Retrieved from https://responsible-robotics-myxf6pn3xr.netdna-ssl.com/wp-content/uploads/2018/08/Drones-in-the-Service-of-SocietyFINAL.pdf
- Villani, V, Pini, F, Leali, F, & Seechi, C. (2018). Survey on human-robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics, 55, 248–266.
- von Schomberg, R. (2013). A vision of responsible research and innovation. In R. Owen, J Bessant, & M Heintz (Eds.), Responsible innovation: Managing the responsible emergence of science and innovation in society (pp. 51–74). UK: Wiley.
- Wajcman, J. (2017). Automation: Is it really different this time? British Journal of Sociology, 68, 119–127.
- Wall, T. (2016). Ordinary emergency: Drones, police and geographies of legal terror. Antipode, 48(4), 1122–1139.
- Wilke, J. (2019, June 5). A drone program taking flight. Day One: The Amazon Blog. Retrieved from https://blog.aboutamazon.com/transportation/a-drone-program-taking-flight
- Wilmer, H, Sherman, A, & Chein, J. (2017). Smartphones and cognition: A review of research exploring the links between mobile technology habits and cognitive functioning. Frontiers in Psychology, 8. 25 April 2017. doi:10.3389/fpsyg.2017.00605.
- Winfield, AF. (2014). The next big thing(s) in robotics. In S Westlake (Ed.), Our work here is done: Visions of a robot economy (pp. 38–44). London: NESTA.
- World Economic Forum (2019). Fourth industrial revolution. Retrieved from https://www.weforum.org/focus/fourth-industrial-revolution?page=186
- Yang, G-Z, Bergeles, C, & Vitiello, V. (2016). Surgical robotics: The next 25 years. Successes, challenges and the road ahead. UK-RAS Network. ISSN 2398–4422. Retrieved from www.ukras.org