
ABSTRACT
This paper focused on the application and evaluation of an improved ant colony search method for the cost optimization of composite beams. The design was based on the American Institute of Steel Construction load and resistance factor design specifications and plastic design concepts. The objective function for composite beam was the cost function. This function included the cost of concrete, steel beam, and shear connectors. In order to validate the proposed model in optimizing composite beam design, two design examples taken from the literature were studied, and the results were compared to the original ant colony optimization and other meta-heuristic algorithms. The results showed that the improved ant colony method was able to find better solutions and had higher convergence speed than other meta-heuristic algorithms. Moreover, a parametric study was conducted to investigate the effects of beam spans and loadings on the cost optimization of composite beams.
Introduction
Designing composite beams involves an iterative and complicated process. An efficient beam design process has to consider to plastic deformation by incorporating the load and resistance factor design (LRFD). Design parameters, calculated based on the guidelines of the American Institute of Steel Construction (AISC), determine whether a beam is fully or partially composite.
While the minimum weight design has been widely used in the optimization of structural systems (Adeli Citation2002; Adeli and Kamal Citation2003; Vanderplaats Citation1984), some studies on structural design have prioritized cost over minimum weight (Ahmadkhanlou and Adeli Citation2005; Eskandari and Korouzhdeh Citation2016; Kaveh and Shokohi Citation2014; Sahab, Ashour, and Toropov Citation2005; Sarma and Adeli Citation1998; Sirca and Adeli Citation2005). A variety of prediction models, including genetic algorithms, one-way waffle slab, and slab formwork using charged system search algorithm, social harmony and improved social harmony, and colony system, have been applied in the cost optimization of composite beams (Adeli and Kim Citation2001; Kaveh and Abadi Citation2010; Kaveh and Ahangaran Citation2012; Kaveh and Behnam Citation2012; Kaveh and Massoudi Citation2012; Kim and Adeli Citation2001; Senouci and Al-Ansari Citation2009). Kravanja and Silih proposed optimization models for composite I beams based on nonlinear programming (NLP) and mixed-integer NLP (Kravanja and Šilih Citation1999, Citation2001). Klansek and Kravanja used NLP for the cost optimization of composite beams produced from duo-symmetrical welded I sections and composite trusses created by rolled channel sections and cold-formed hollow sections. They then compared these three composite floor systems (Klanšek and Kravanja Citation2006a, b).
Adeli and Kim designed composite floors based on the AISC LRFD in the plastic design, performed cost optimization using a floating point genetic algorithm model, and calculated the total cost as a function of costs of concrete, steel beam, and shear connectors. The longitudinal shear connection created by shear connectors effectively attached the beams to the cured concrete and ensured a composite structure. A comparison between the provided designs showed that a formal cost optimization could enhance the cost-effectiveness of the structures (Kim and Adeli Citation2001). Another study developed a general model for cost optimization of single and multiple span reinforced concrete slabs with various end conditions subjected to all the constraints of the American Concrete Institute code (Ahmadkhanlou and Adeli Citation2005).
A number of novel, innovative, and self-organized optimization techniques have recently emerged in structural optimization. One of these techniques, called ant colony optimization (ACO) algorithm, follows ants’ behavior in finding the optimal route to food and tries to solve combinatorial optimization problems accordingly (Dorigo, Birattari, and Stützle Citation2006; Dorigo and Stützle Citation2009; Stutzle and Dorigo Citation2002). Numerous studies have used ACO algorithms to solve structural optimization problems (Hasançebi and Carbas Citation2011), the traveling salesman problem (Dorigo and Gambardella Citation1997a, b), and the vehicle routing problem (Abdulkader, Gajpal, and ElMekkawy Citation2015; Bell and McMullen Citation2004; Bullnheimer, Hartl, and Strauss Citation1999; Fuellerer et al. Citation2009). It has also been applied in the development of an event-based scheduler for software project scheduling and staffing(Chen and Zhang Citation2013), construction time, and cost optimization (Ng and Zhang Citation2008), and first flush effects management in urban wastewater systems (Verdaguer et al. Citation2014). The improved ACO (IACO) algorithm is an enhanced version of the ACO algorithm with better performance, fewer numbers of iterations, shorter computation time, and higher convergence speed. The incorporation of a genetic operator and the modification of global updating rules increase the robustness, self-adaptation, parallelism, and positive feedback of the IACO algorithm (Yang and Zhuang Citation2010). In addition to its application in the solution of the mobile agent routing problem, constrained engineering design problems (Kaveh and Talatahari Citation2010a), and the IP trace back problem(Wang, Lin, and Wang Citation2016), the IACO algorithm has been used in the design of planar steel frames (Kaveh and Talatahari Citation2010b) and feature selection in online detection of foreign fibers in cotton(Zhao et al. Citation2014).
Since the ACO algorithm has not been found to be significantly more efficient than other algorithms in the cost optimization of composite floor systems, the present study attempted to introduce an IACO algorithm for the cost optimization of composite beams. We believe that the developed method can yield optimal design solutions that satisfy constraint of AISC-LRFD specification(AISC Citation2005). Two examples were extracted from the available literature to clarify the efficiency of the proposed method in finding optimal design solutions. The model was also compared with the original ACO algorithm and other meta-heuristic algorithms to confirm its higher convergence speed and better performance in finding optimal solutions. The effects of beam spans and loadings on the cost optimization of composite beams were also evaluated in a parametric study.
Design parameters and formulation
The design parameters are formulated in two major steps: (1) to determine the effective decision variables that affect the design of composite beams and (2) to formulate the objective function. The notations of cost functions and constraints can be listed as follows:
For the concrete slab: slab thickness (tc), compressive strength of concrete (c), and effective depth of the slab (de).
For the steel section: beam span length (L), steel beams space (dc), ultimate moment (Mu), nominal moment (Mn), cross-sectional area of steel (As), the web thickness tw, and the flange thickness tf.
For the shear connectors: the cross-sectional area of shear connector () and the number of shear connectors (Ns). A number of possible values for the five decision variables are given in .
Table 1. List of possible values for the five decision variables.
Objective and constraints function
The model was designed to measure the effects of incorporating different decision variables into the cost optimization model of composite beams. The total cost function can be described as:
where Cc, Cs, and Csd are the cost of concrete, steel beam, and shear connectors, respectively. They are defined as:
where L is the beam span, ρ is the unit weight of steel section, is the cost of concrete per unit weight,
is the cost of the steel section per unit weight,
is weight per unit length, and
is the cost of one shear connector (including installation and material costs).
According to , the elastic design calculations of the composite beam can be performed using the following relationships:
Figure 1. Composite beam elastic design construction.
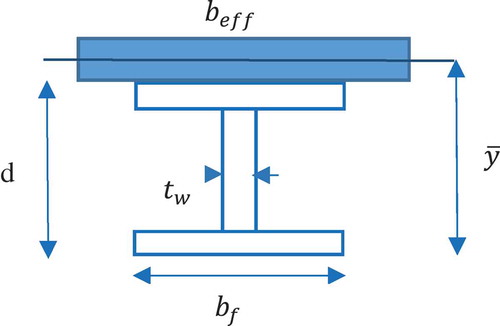
where Fy is the yield strength, d is the depth of steel section, a is the depth of the equivalent stress block, n is the modular ratio, Es is the modulus of elasticity for steel, Ec is the modules of elasticity for concrete, is the distance from the bottom of the steel beam to the elastic neutral axis, and Itr is the moment of inertia of the fully transformed composite section.
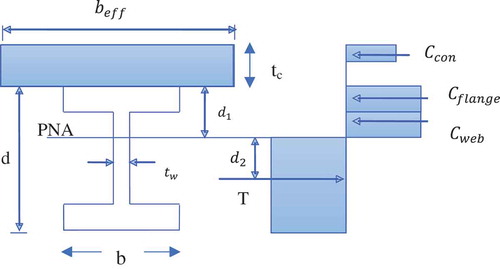
When the plastic neutral axis (PNA) lies within the beam flange and web as shown in , the following equations can be applied:
Figure 2. Plastic design of composite beams when the plastic neutral axis (PNA) lies within steel web.
The following equations can be used to calculate the number of UNPs:
where is the total horizontal shear force,
is the cross-sectional area of the shear connector,
is the allowable shear force,
is the width of the shear connector, and Ns is the number of shear connectors.
The moment capacity of the composite section needs to be investigated to determine the ability of the section to take all dead and live loads. Therefore, should be considered as 0.85 for the composite section and as 0.9 for the noncomposite steel section.
For unshored composite beam, the deflection of the composite beam due to live loads, LL, is calculated as:
The vibration response floor for the AISD-LRFD code is an expression of a damping ratio:
where C1 is a numeric coefficient such as 1/360, D is the percentage of critical damping, A0 is the maximum initial amplitude of the floor system, f is the first natural frequency of the floor system in Hz, and g is the gravitational acceleration.
The maximum center-to-center spacing shear connectors should not be greater than eight times the total slab thickness. Moreover, a concrete cover equal to 2.5 cm is required around the shear connectors.
Model and flowchart implementation
A model based on the IACO algorithm is introduced for the cost optimization of composite beams. This model can serve as a search and optimization tool allowing decision-makers to determine the optimal or near-optimal solutions for problems with a large search space.
This section will first briefly explain the ACO and IACO algorithms and then use the IACO algorithm for the cost optimization of composite beams.
The ACO algorithm
In the 1990s, Dorigo and Gambardella focused on ants’ communication behaviors and introduced a meta-heuristic algorithm called the ACO algorithm (Dorigo and Gambardella Citation1997b). Ant communities indirectly communicate by using an accumulative and evaporative chemical (i.e., pheromone) (Blum and Dorigo Citation2004a, b, Citation2005; Kulkarni and Tai Citation2010) . When searching for food, ants sense the levels of pheromone and instinctively take the routes with higher pheromone concentrations. As a result of this autocatalytic (positive feedback) process, ants tend to follow a route through which larger numbers of their community members have traveled (Dorigo, Di Caro, and Gambardella Citation1999). Due to the evaporative nature of pheromones, more ants move along the shortest route, and the level of pheromone on this route further increases. This will again increase the number of ants traveling along the shortest route. The ACO algorithm adopts an iterative approach to problem-solving and works by dispatching a group of artificial ants. Previous studies have largely focused on the empirical and theoretical analysis of ACO algorithms.
Solving a particular problem with the ACO algorithm would require the definition of a set of paths for ants. In this problem, different decision variables are regarded as the paths along which the ants can move, i.e. the group of artificial ants will seek the best set of decision variables that minimize the objective function. The ACO algorithm is generally described as the iteration and interaction of the following three main activities:
Initialization: During the initialization of the ACO, the pheromone trial is first started, and a group of ants are then randomly placed on different routes.
Solution construction: During each iteration, ants use the state of pheromone and heuristic information to select the components and form a complete solution through a constructive method. Heuristic information depends on the particular specifications of each problem and increases the probability of the selection of promising components during the solution construction process. According to the probability given by Equation (28), when the ant n travels, probability that the nth ant position in the roulette wheel choose rth variable to be visited is:
Ln (r) is the set of variables that remain to be selected by ant n as the rth variable, and is the amount of pheromone deposited on the variable number s as a candidate for being the rth variable. Furthermore, α and β are the pheromone intensity and visibility weighting factors, respectively. These two parameters control the relative contribution between τ and η. While the pheromone information stored in the trail matrix provides a global view about the selection of the variable based on a quality measure of the solution constructed afterward, the value of visibility depends on a voracious heuristic for the original problem (which considers only the local information on variable). As seen,
can be defined as:
Pheromone updating rule: After all ants reach their destination, the global pheromone updating rule will be used to update the intensity of pheromone trails for all variables. In this process, a larger level of pheromone will be assigned to shorter routes in that iteration. The level of pheromone determines the efficiency of variables in previous iterations. All ants can update the pheromone, and the elitist ant deposits additional pheromone on variable of the best route. The rule is obtained from the following equation:
where 0 < ρ < 1 shows the durability of pheromone trails and (1 − ρ) is the evaporation rate. Moreover, , the amount of pheromone increase for the elitist ant, is calculated by the following equation:
where Q is a constant and L is the cost for the best rout found by the elitist ant.
After each iteration, the local trail updating rule decreases the level of pheromone on routes selected by the ant colony during the past iteration. This process is performed based on the following equation:
where 0 < <1 is a parameter for pheromone modification. The whole process will be repeated until a stopping criterion is met.
The IACO algorithm
The IACO algorithm is an extension of the original ACO algorithm. The IACO enhances the ability of the ants to search all feasible routes through a global heuristic mechanism in which the ant colony is partitioned into multiple subgroups. Each subgroup will have its own pheromone updating rule. The algorithm has been used for solving optimization problems and identifying the most probable route under the constraints of the required composite beam design and convergence time.
The IACO algorithm for composite beams
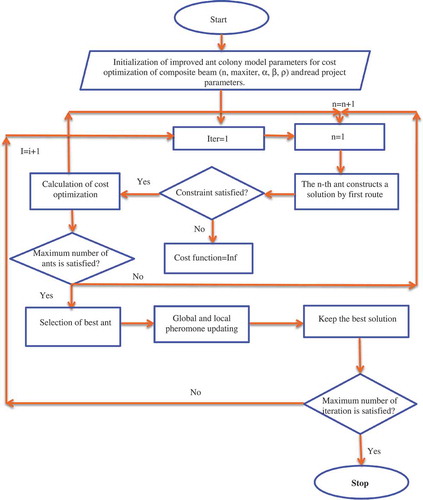
In order to perform the IACO algorithm, cost optimization of the composite beam process is applied in two stages: the global search and the local search. In the global search, only the ants that find the shorter route are allowed to update the pheromone trail intensity. The space is decreased by using this rule since not every ant is allowed to update the pheromone trial when they return to the initial design. shows an example of how an ant searches a tour to select parameters from its subsets and optimizes the design of the composite beam. Each ant will first randomly select the shear connector (UNP) because the selection of this variable is independent from others. Other design parameters will then be selected based on the roulette wheel. The computation procedure of cost optimization of composite beam design is shown in . As the flowchart shows, the following steps are taken:
Read the project and algorithm parameters needed to initialize the search process.
In the first iteration, the ant randomly selects the first design parameter (UNP) and then selects other parameters based on their roulette wheel.
If all the constraints are satisfied, calculate the cost function. Otherwise, consider the cost function equal to the large amount.
When all the ants have finished these steps, select the elitist ant based on the minimum cost function. Then, update the global and local pheromones.
If the new cost function is better than the prior one, keep the best solution.
Repeat all steps until the number of iterations is completed.
Figure 3. The selection route of the ants for composite beam design.
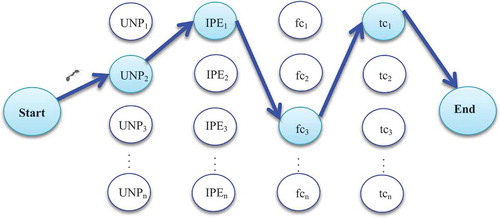
Figure 4. Computational flowchart of the proposed model.
These computational steps are implemented using MATLAB programming.
Numerical examples
In this section, we optimize the problem for one span. This span can be repeated in different directions to cover a ceiling. In order to examine the performance of the proposed algorithm, two examples taken from Kaveh and Ahangaran studies (Kaveh and Ahangaran Citation2012) were analyzed. In order to confirm the better performance and higher convergence speed of the proposed model, it was compared with the ACO algorithm, standard harmony search (HS), improved harmony search (IHS), and highly reliable harmony search (HRHS).
Example 1
In the first example, the cost optimization of a composite floor design with input design data is presented ().
Table 2. Input data for the composite floor design examples.
In this example, the following constraints, defined by AISC-LRFD specifications, have to be satisfied(AISC Citation2005):
The moment capacity of the composite beam section to investigate the ability of taking all dead and live loads;
Deflection of composite beam; and
Shear connector placement and spacing.
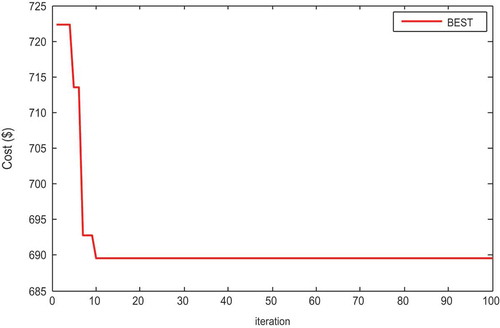
The optimization results of the six methods are compared in and . As seen, the proposed model had the greatest cost-saving ability among the evaluated methods. In fact, while the evaluated methods had better cost-saving performances (in range of 12–17%) compared to the ACO algorithm, the cost-saving ability of the proposed model was 32.5% higher than that of the ACO model. Moreover, while the social HS, IHS, and HS required 349, 210, and 370 iterations, respectively(Kaveh and Ahangaran Citation2012), the proposed model could find the optimal solution through fewer iterations. This finding highlights the higher convergence speed and better performance of the proposed model compared to the other methods.
Table 3. Comparison of the proposed model with other methods for Example 1.
Figure 5. Design history of Example 1.
Example 2
Example 1 was studied with temporary shores. In this example, however, the floor is constructed without shores, and all constraints mentioned in the “Objective and constraints function” section have to be satisfied. The same input data used in the first example were also used here.
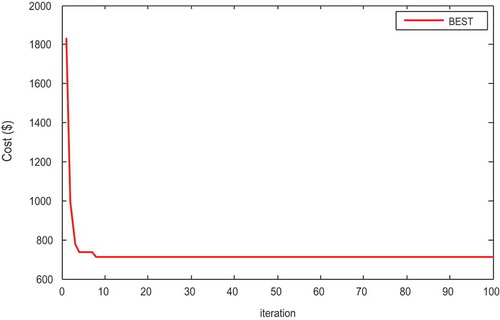
shows the results of optimal designs achieved by the present algorithm and compares the proposed model with other algorithms. Apparently, the cost-saving ability of the proposed model was 20.4% higher than that of the HS model (which in turn had better performance compared to other methods). As demonstrated in , the proposed model yielded better results in fewer iterations.
Table 4. Comparison of the proposed model and other methods for Example 2.
Figure 6. Design history of Example 2.
Parametric study
A parametric study was conducted to evaluate the effects of beam spans and loading on cost optimization of composite beams. In the first section, a concrete compressive strength of 200 kg/cm2 and slab thickness of 15 cm were selected. Therefore, the cost of concrete was constant, but the cost of steel beam and shear connectors changed. summarizes the values considered for the beam and loading. Other data are similar to those listed in .
Table 5. Parametric study.
provides the optimal design results achieved using the proposed model. Consistent with previous works (Kaveh and Ahangaran Citation2012; Kaveh and Massoudi Citation2012; Senouci and Al-Ansari Citation2009), the steel section size and the number of shear connectors increased with both the beam span and the acting loads to satisfy the strength and deflection constraints.
Table 6. Parametric study results.
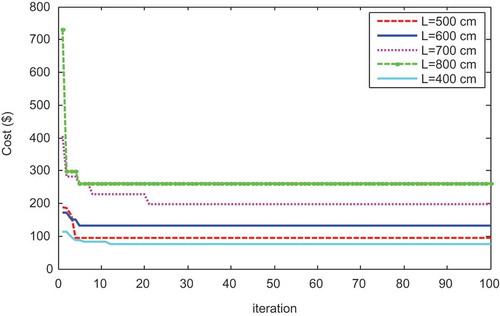
The history of design for five different beam spans and two different loadings is shown in and . As seen, the proposed model had much higher convergence speed and could yield the best solution in less than 20 iterations.
Figure 7. Design history for five different beam spans DL = 0.03 kg/cm2 and LL = 0.02 kg/cm2.
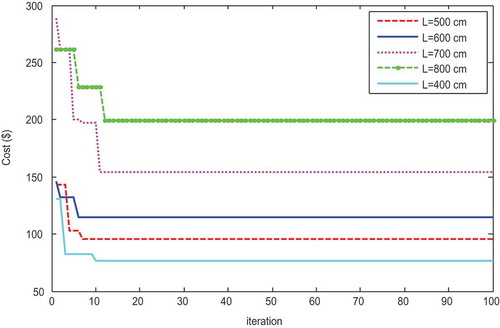
Figure 8. Design history for five different beam span DL = 0.04 kg/cm2 and LL = 0.03 kg/cm2.
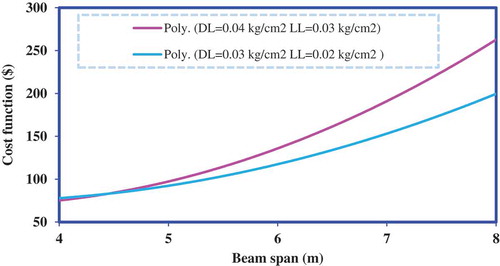
summarizes the second-order polynomial fits between beam costs and spans. These values can be used to get an initial estimation of the total cost under a given span length or a given loading combination.
Table 7. Polynomial best-fit equations.
depicts the curves representing the variations between total costs and beam spans under two different loadings. The curves had a nonlinear trend in which cost function increased with increasing beam span and load.
Figure 9. Total costs of the optimal composite beam design.
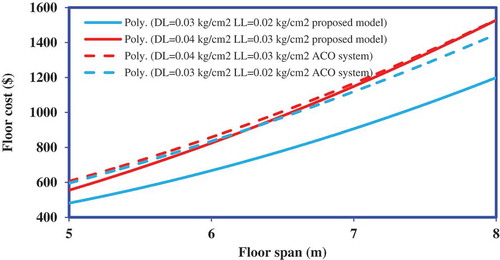
In the second section, the costs of the optimum design provided by the proposed model and the ACO algorithm for a rectangular floor area were compared. The data are taken from a study by Kaveh and Massoudi (Kaveh and Massoudi Citation2012). shows the costs of the optimal design. The polynomial best-fit equations for the proposed model and the ACO algorithm were used to compare the two models (). demonstrates the curves representing the variations in total costs and floor spans of each method under two different loadings. As seen, the proposed model provided better solutions than the ACO system.
Table 8. Parametric study results.
Table 9. Polynomial best-fit equations for the proposed method and the ant colony optimization (ACO) system.
Figure 10. Comparison of costs of optimal composite floor design for the proposed model and ant colony optimization (ACO) system.
Conclusion
A model based on the IACO algorithm was proposed as an efficient method for the cost optimization of composite beams using concrete slab and steel beam profiles along with UNP profiles. This work mostly aimed to present a simple and efficient IACO algorithm with potential application in practical engineering problems. Due to its significant cost-saving ability and simplicity, the proposed method can be used in many other engineering design problems to reduce construction costs and computational time.
The obtained results confirmed the IACO algorithm as a powerful and efficient method for finding the optimum solution in composite beam design. Moreover, the proposed model had higher convergence speed than other optimization algorithms.
References
- Abdulkader, M. M., Y. Gajpal, and T. Y. ElMekkawy. 2015. Hybridized ant colony algorithm for the multi compartment vehicle routing problem. Applied Soft Computing 37:196–203. doi:10.1016/j.asoc.2015.08.020.
- Adeli, H. 2002. Advances in design optimization. Chapman & Hall: London, UK.
- Adeli, H., and O. Kamal. 2003. Parallel processing in structural engineering. Elsevier Science Publishing LTD: Essex, UK.
- Adeli, H., and H. Kim. 2001. Cost optimization of composite floors using neural dynamics model. Communications in Numerical Methods in Engineering 17 (11):771–87. doi:10.1002/cnm.448.
- Ahmadkhanlou, F., and H. Adeli. 2005. Optimum cost design of reinforced concrete slabs using neural dynamics model. Engineering Applications of Artificial Intelligence 18 (1):65–72. doi:10.1016/j.engappai.2004.08.025.
- AISC. 2005. Specification for structural steel buildings. Chicago, IL: American institute of steel construction.
- Bell, J. E., and P. R. McMullen. 2004. Ant colony optimization techniques for the vehicle routing problem. Advanced Engineering Informatics 18 (1):41–8. doi:10.1016/j.aei.2004.07.001.
- Blum, C., and M. Dorigo. 2004a. Deception in ant colony optimization. Ant colony optimization and swarm intelligence, 118–29. Springer: Berlin, Heidelberg.
- Blum, C., and M. Dorigo. 2004b. The hyper-cube framework for ant colony optimization. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics 34 (2):1161–72. doi:10.1109/TSMCB.2003.821450.
- Blum, C., and M. Dorigo. 2005. Search bias in ant colony optimization: On the role of competition-balanced systems. IEEE Transactions on Evolutionary Computation, 9 (2):159–74.
- Bullnheimer, B., R. F. Hartl, and C. Strauss. 1999. Applying the ant system to the vehicle routing problem, 285–96. Meta-Heuristics, Springer: Boston, MA, US.
- Chen, W.-N., and J. Zhang. 2013. Ant colony optimization for software project scheduling and staffing with an event-based scheduler. IEEE Transactions on Software Engineering, 39 (1):1–17.
- Dorigo, M., M. Birattari, and T. Stützle. 2006. Ant colony optimization. IEEE Computational Intelligence Magazine, 1 (4):28–39.
- Dorigo, M., G. Di Caro, and L. M. Gambardella. 1999. Ant algorithms for discrete optimization. Artificial Life 5 (2):137–72. doi:10.1162/106454699568728.
- Dorigo, M., and L. M. Gambardella. 1997a. Ant colonies for the travelling salesman problem. BioSystems 43 (2):73–81. doi:10.1016/S0303-2647(97)01708-5.
- Dorigo, M., and L. M. Gambardella. 1997b. Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Transactions on Evolutionary Computation, 1 (1):53–66.
- Dorigo, M., and T. Stützle. 2009. Ant colony optimization: Overview and recent advances. Techreport, IRIDIA, Universite Libre de Bruxelles, Boston, MA, US.
- Eskandari, H., and T. Korouzhdeh. 2016. Cost optimization and sensitivity analysis of composite beams. Civil Engineering Journal, 2 (2):52–62.
- Fuellerer, G., K. F. Doerner, R. F. Hartl, and M. Iori. 2009. Ant colony optimization for the two-dimensional loading vehicle routing problem. Computers and Operations Research 36 (3):655–73. doi:10.1016/j.cor.2007.10.021.
- Hasançebi, O., and S. Carbas. 2011. Ant colony search method in practical structural optimization. International Journal of Optimization in Civil Engineering 1 (1):91–105.
- Kaveh, A., and A. S. M. Abadi. 2010. Cost optimization of a composite floor system using an improved harmony search algorithm. Journal of Constructional Steel Research 66 (5):664–69. doi:10.1016/j.jcsr.2010.01.009.
- Kaveh, A., and M. Ahangaran. 2012. Discrete cost optimization of composite floor system using social harmony search model. Applied Soft Computing 12 (1):372–81. doi:10.1016/j.asoc.2011.08.035.
- Kaveh, A., and A. Behnam. 2012. Cost optimization of a composite floor system, one-way waffle slab, and concrete slab formwork using a charged system search algorithm. Scientia Iranica 19 (3):410–16. doi:10.1016/j.scient.2012.04.001.
- Kaveh, A., and M. Massoudi. 2012. Cost optimization of a composite floor system using ant colony system. Iranian Journal of Science and Technology, Transactions of Civil Engineering 36 (C2):139–48.
- Kaveh, A., and F. Shokohi. 2014. Cost optimization of castellated beams using charged system search algorithm. Iranian Journal of Science and Technology, Transactions of Civil Engineering 38 (C1):235–49.
- Kaveh, A., and S. Talatahari. 2010a. An improved ant colony optimization for constrained engineering design problems. Engineering Computations 27 (1):155–82. doi:10.1108/02644401011008577.
- Kaveh, A., and S. Talatahari. 2010b. An improved ant colony optimization for the design of planar steel frames. Engineering Structures 32 (3):864–73. doi:10.1016/j.engstruct.2009.12.012.
- Kim, H., and H. Adeli. 2001. Discrete cost optimization of composite floors using a floating-point genetic algorithm. Engineering Optimization 33 (4):485–501. doi:10.1080/03052150108940930.
- Klanšek, U., and S. Kravanja. 2006a. Cost estimation, optimization and competitiveness of different composite floor systems—Part 1: self-manufacturing cost estimation of composite and steel structures. Journal of Constructional Steel Research 62 (5):434–48. doi:10.1016/j.jcsr.2005.08.005.
- Klanšek, U., and S. Kravanja. 2006b. Cost estimation, optimization and competitiveness of different composite floor systems—Part 2: Optimization based competitiveness between the composite I beams, channel-section and hollow-section trusses. Journal of Constructional Steel Research 62 (5):449–62. doi:10.1016/j.jcsr.2005.08.006.
- Kravanja, S., and S. Šilih. 1999. The competitive spans of composite beams, in: J. Studenička, F. Wald, J. Machaček (Eds.), Proceedings of the Conference Eurosteel 99, Czech Technical University in Prague, Prague, 1999, pp. 623–626.
- Kravanja, S., and S. Šilih. 2001. The MINLP optimisation of composite I-beams. in: W.P. De Wilde, W.R. Blain, C.A. Brebbia (Eds.), Computer Aided Optimum Design of Structures VII, 7th International Conference on Computer Aided Optimum Design of Structures, WIT Press, Southampton (Boston), pp. 401–407.
- Kulkarni, A. J., and K. Tai. 2010. Probability collectives: A multi-agent approach for solving combinatorial optimization problems. Applied Soft Computing 10 (3):759–71. doi:10.1016/j.asoc.2009.09.006.
- Ng, S. T., and Y. Zhang. 2008. Optimizing construction time and cost using ant colony optimization approach. Journal of Construction Engineering and Management 134 (9):721–28. doi:10.1061/(ASCE)0733-9364(2008)134:9(721).
- Sahab, M., A. Ashour, and V. Toropov. 2005. Cost optimisation of reinforced concrete flat slab buildings. Engineering Structures 27 (3):313–22. doi:10.1016/j.engstruct.2004.10.002.
- Sarma, K. C., and H. Adeli. 1998. Cost optimization of concrete structures. Journal of Structural Engineering 124 (5):570–8. doi:10.1061/(ASCE)0733-9445(1998)124:5(570).
- Senouci, A. B., and M. S. Al-Ansari. 2009. Cost optimization of composite beams using genetic algorithms. Advances in Engineering Software 40 (11):1112–8. doi:10.1016/j.advengsoft.2009.06.001.
- Sirca, G. F., Jr, and H. Adeli. 2005. Cost optimization of prestressed concrete bridges. Journal of Structural Engineering 131 (3):380–8. doi:10.1061/(ASCE)0733-9445(2005)131:3(380).
- Stutzle, T., and M. Dorigo. 2002. A short convergence proof for a class of ant colony optimization algorithms. IEEE Transactions on Evolutionary Computation 6 (4):358–65. doi:10.1109/TEVC.2002.802444.
- Vanderplaats, G. N. 1984. Numerical optimization techniques for engineering design: With applications. New York: McGraw-Hill.
- Verdaguer, M., N. Clara, O. Gutiérrez, and M. Poch. 2014. Application of Ant-Colony-Optimization algorithm for improved management of first flush effects in urban wastewater systems. Science of the Total Environment 485:143–52. doi:10.1016/j.scitotenv.2014.02.140.
- Wang, P., H.-T. Lin, and T.-S. Wang. 2016. An improved ant colony system algorithm for solving the IP traceback problem. Information Sciences 326:172–87. doi:10.1016/j.ins.2015.07.006.
- Yang, J., and Y. Zhuang. 2010. An improved ant colony optimization algorithm for solving a complex combinatorial optimization problem. Applied Soft Computing 10 (2):653–60. doi:10.1016/j.asoc.2009.08.040.
- Zhao, X., D. Li, B. Yang, C. Ma, Y. Zhu, and H. Chen. 2014. Feature selection based on improved ant colony optimization for online detection of foreign fiber in cotton. Applied Soft Computing 24:585–96. doi:10.1016/j.asoc.2014.07.024.