
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Great deluge (GD) algorithm same as other metaheuristics can solve feature selection problem. The GD imitates that in a great deluge someone climbing a hill and attempt to progress in any direction that does not get his/her feet wet in the expectation of discovering a way up when the water Level rises. The drawbacks of GD are: 1) a local search, which may lead the algorithm toward a local optima and 2) a challenging estimation of quality of the final solution in solving most of the problems. In this paper, for the first issue, a population-based great deluge (popGD) algorithm with additional recurrence operation is proposed. This operation is an imitation of no progress of hill climber after a long time; the climber tries to move small steps even downward in hope of finding better way to climb. For the second problem, a technique with an automate alteration of the Level is proposed. The statistical analysis of the results from 25 test functions and 18 benchmark feature selection problems supports the ability of the method. Finally a real-world academician data are employed to perform feature selection and execute classification result with selected features.
Introduction
Feature selection is considered as an important and necessary step (pre-processing) before performing any data mining task and data engineering. Selection of a subset of the full feature set while still describes the original and full feature set with less information loss is defined as feature selection (Han, Kamber, and Pei Citation2011). Rough set theory presented in (Pawlak Citation1982) as a filter-based tool determines the relations between conditional features and decision feature. Rough set feature selection is performed by only using the data and no extra information.
Searching for a minimal subset of original feature set with the same level of discernibility of all features using metaheuristic algorithms is a common method in literature. See for example (Abdullah and Jaddi Citation2010; Aljarah et al. Citation2018; Derrac et al. Citation2012; Jaddi and Abdullah Citation2013c, Citation2013a, Citation2013b; Liang et al. Citation2014; Mafarja, Abdullah, and Jaddi Citation2015; Mafarja et al. Citation2018; Mafarja and Mirjalili Citation2018, Citation2017; Zeng et al. Citation2015). Simulated annealing was used to solve feature selection in many researches such as practices in (Lin et al. Citation2008; Meiri and Zahavi Citation2006). Tabu search was also applied to feature selection problem in (Tahir, Bouridane, and Kurugollu Citation2007; Zhang and Sun Citation2002). A greedy heuristics have been applied for rough set feature selection in (Zhong, Dong, and Ohsuga Citation2001). A multivariate feature selection approach has been solved using a random sub-space method in (Lai, Marcel, and Wessels Citation2006). Memetic algorithm was also proposed in (Zhu, Ong, and Dash Citation2007) for feature selection. Different versions of ant colony optimization (ACO) were presented in (Chen, Miao, and Wang Citation2010) and (Kabir, Shahjahan, and Murase Citation2012) for the same problem. A selection of gene expression data was practiced in (Abusamra Citation2013). A version of particle swarm optimization (PSO) approach using decision tree was presented in (Zhang et al. Citation2014) for selection of features. In (Rodrigues et al. Citation2014), same problem was solved using a bat algorithm (BA). Fuzzy population-based algorithm was also used for feature selection in (Mafarja, Abdullah, and Jaddi Citation2015). Another research (Emary, Zawbaa, and Hassanien Citation2016) shows the ability of binary ant line optimization (ALO) algorithm for feature selection. Electromagnetic-like algorithm also solved this problem in (Abdolrazzagh-Nezhad and Izadpanah Citation2016). Two versions of whale optimization-based algorithms (WOA) were presented in (Mafarja and Mirjalili Citation2017) and (Mafarja and Mirjalili Citation2018) to solve feature selection problem. Binary butterfly optimization approaches for feature selection was proposed in (Arora and Anand Citation2019). Feature selection strategy based on hybrid crow search optimization algorithm integrated with chaos theory and fuzzy c-means algorithm for medical diagnosis was presented in (Anter and Ali Citation2020). In another research presented in (Tubishat et al. Citation2019), an improved whale optimization algorithm for feature selection in Arabic sentiment analysis was proposed. A filter-based bare-bone particle swarm optimization algorithm for unsupervised feature selection was studied in (Zhang et al. Citation2019). A hybrid nature-inspired binary optimizers for feature selection was proposed in (Mafarja et al. Citation2020). A Research on feature selection for rotating machinery based on Supervision Kernel Entropy Component Analysis with Whale Optimization Algorithm was performed in (Bai et al. Citation2020).
Great deluge algorithm (GD) (Dueck Citation1993) (), which is a single-solution, in many features is similar to hill climbing (HC) and simulated annealing (SA) algorithms. The name of GD comes from the similarity that in a great deluge someone does hill climbing and attempt to track any direction. In this climbing the person tries to not get his/her feet wet expecting to find a way up while the water level is increased. In original GD a single solution represents the position of person and the new solution is calculated to find a new position of the person. The value of level represents the water level and is increased in each iteration based on the quality of current solutions and also estimated quality of the final solution. The acceptance of the current solution depends on value of level in the current iteration. GD has been employed to solve many problems in literature such as researches in (Acan and Ahmet Citation2020; Baykasoglu Citation2012; Baykasoglu, Durmusoglu, and Kaplanoglu Citation2011; McCollum et al. Citation2009; Mcmullan Citation2007; Mosbah and Dao Citation2010; Nahas et al. Citation2008; Nourelfath, Nahas, and Montreuil Citation2007).
Figure 1. Pseudocode of GD algorithm
In this paper, new version of GD is proposed in which surmounts the two weaknesses of GD. The weaknesses are: 1) Getting stuck in local optima due to searching around single solution same as other single-solution heuristics. 2) Challenging estimation of quality of final solution for most of the problems. In order to solve the first problem, a population of single solutions is generated and each single solution follows the local search around itself and tries to improve the quality of solution in each iteration. This increases the exploration of the algorithm. In addition to this modification, all single solutions in population use a new operation called recurrence operation. This operation provides possibility of jumping from local optima. The recurrence operation is simulation of when a hill climber stuck during the climbing and no progress after a long time; the climber makes small moves around even downward in hope of finding better way to climb. These two modifications offer better exploration and reduce the risk of getting stuck in local optima (first drawback). To overcome the second drawback, an automate alteration of the Level is proposed in which eliminates the need for estimation of quality of final solution.
The proposed algorithm is tested using 25 test functions, and the results are compared and analyzed using statistical analysis. Furthermore, 18 benchmark feature selection problems are used to investigate the performance of the proposed method when it is applied for feature selection. The statistical analysis and the box plot graphs support the ability of the method. In addition, the method is applied to real-world academician publication data for feature selection and classification accuracy of the selected features is computed.
The rest of this paper is organized as follows: Section 2 provides a brief explanation of the basic GD algorithm as preliminary subject. The details of the proposed method are given in section 3. Discussion and analysis of the experimental results when the algorithm is applied on benchmark test functions, benchmark feature selection and real-world feature selection problems in section 4. The work is concluded in Section 5 in this paper.
The GD Algorithm
The GD algorithm firstly proposed in (Dueck Citation1993) as a local search metaheuristic algorithm. This algorithm accepts the solutions that improve the quality of the best solution found so far. The worse solutions are also accepted in this algorithm if the quality of these solutions is better than boundary level with hopes of improving the quality of the best solution. In initialization part of this algorithm, the level is set to quality of initial solution. The value of level is increased or decreased (depends on minimization or maximization approaches) using a fixed rate β during the search process. The value of β is calculated based on the quality of initial solution and estimated quality of the final solution as is shown in EquationEq. (1)(1)
(1) :
In this equation, the EQ is estimated quality of the final solution, f(sol) is quality of initial solution and the iterationNum is predefined number of iterations.
set initial solution, Sol
set best solution, Solbest
set current solution, Solcurrent
set initial level, Level
set iteration ← 0
set number of iterations, iterationNum
calculate the value of β by EquationEq. 1(1)
(1)
do while (iteration < iterationNum)
create new solution, Solnew
evaluate Solnew
if Solnew is better than Solbest
update Solcurrent and Solbest
else
if Solnew better than Level
update Solcurrent
endif
endif
update the Level
increase iteration
end while
return Solbest
This algorithm starts with a single solution and tries to find a better solution around it. In each iteration, the current solution and the best solution are updated based on the quality of the current solution. If the quality is better than the best solution found so far, the best solution is updated. Otherwise, if the quality is better than the value of level in the current iteration, the current solution is only updated. Accepting the worse solution as current solution in this algorithm keeps the region of the search slightly wider when we compare it with hill climbing algorithm. From the other side, the boundary level used in this algorithm provides more focus of the algorithm on better solutions.
Proposed Method
Three major modifications are applied on basic GD to improve the performance of the algorithm. The first modification is to use the advantages of the population of this algorithm. The second modification is the application of recurrent operation and the third amendment is to avoid the estimation of quality of the final solution.
A population of random candidate solutions is generated in first step of algorithm. The quality of the solutions is calculated. The best solution within all is found. The value of the Level is initialized. Each solution works as a single-solution GD in which each one generates a new solution. If the new solution in neighborhood of current solution is better than the best the best solution is updated, otherwise, if the new solution is better than the value of level this solution is accepted as current solution. The recurrence operation is performed if after a certain number of iteration there is no improvement in quality of the best solution. All solutions in population follow the same process with the same value of the Level. After visiting of all solutions in population the value of Level is automatically altered by calculation the value of β where there is no need to estimation of quality of final solution. The next iteration is started in this stage. The repetition of this process is performed until termination criterion is reached.
The recurrence operation is performed if after a defined number of iterations, improvement of the quality in best solution is not observed. A number of solutions in neighborhood of the current solution are generated and the best among them is selected to be as candidate solution. This is an extension of GD which is simulation that a hill climber ties to go up in any direction that his/her feet does not get wet in great deluge. The recurrence operation is a simulation of when the hill climber gets stuck somewhere during the hill climbing and progress is difficult to perform. The climber decides to move around to find a way easier for progress.
The value of Level in increased during the search process and the rate of incrimination is calculated using the value of β. In basic GD, this value is constant which presents a linear boundary of Level. In popGD, a nonlinear boundary Level with independent estimation of the final quality is used. This provides a boundary Level which is effective with no challenging process of estimation. Furthermore, it reduces the number of parameters for the algorithm. The GD with modifications is shown in the flowchart and pseudocode in and , respectively.
set initial population
set number of solutions in population, popSize
set ith solution in the population, Soli
set best solution around soli, besti
set current solution around soli. currenti
set best solution among all in population, Solbest
set initial level, Level
set β← 0
set iteration ← 0
set i ← 0
set number of iterations, iterationNum
do while (iteration < iterationNum)
for all solutions (Soli) in population
evaluate Soli
if Soli better than besti
update currenti and besti
else
if Soli better than Level
update currenti
endif
endif
if there is no improvement after certain number of iteration
apply recurrence operation
endif
update the Solbest
endfor
update Solbest
calculate the β and update the Level
increase iteration
endwhile
return Solbest
Figure 2. Flowchart of popGD
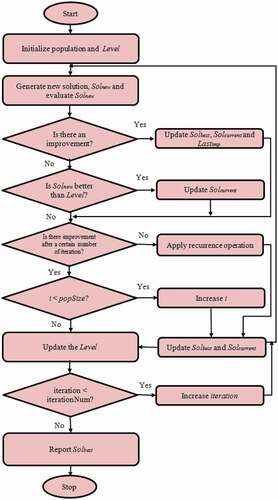
Figure 3. Pseudocode of popGD
Based on modifications applied on GD algorithm, the algorithm can search more globally with no estimation of quality of final solution using a nonlinear level. The details of the modifications are explained in following subsections.
Population for Great Deluge
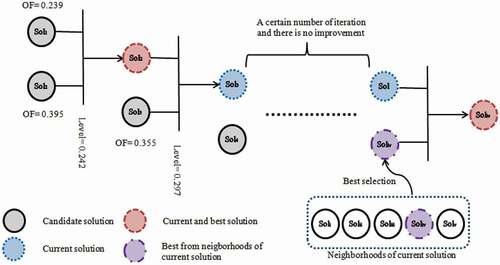
The GD algorithm is a local search approach, and it searches a region of the search space that initial solution is located. Therefore, quality of final solution depends on location of initial solution. In local search algorithms the possibility of getting stuck in local optimum is high for the same reason. Since population-based algorithms, explore the search space globally, the popGD similar to other population-based algorithms uses a population of solutions. In popGD, a population of single solutions walks around the search space while each one search locally around itself and tries to improve its quality. In this algorithm, each single solution works separately but in parallel with other solutions. This process is similar to a competition between the solutions. The effort of each solution is to find a better solution in its neighborhoods. In popGD, each solution in the population follows the same process as other solutions in population. The solution better than the best solution within the neighborhoods, is updated as best solution of this region. The worse solutions are also accepted as the current solution if they are better than the level. The value of level is equal for all solutions in the population in each iteration. The overall process of population activities is shown in .
Figure 4. Schematic example of population activity in popGD
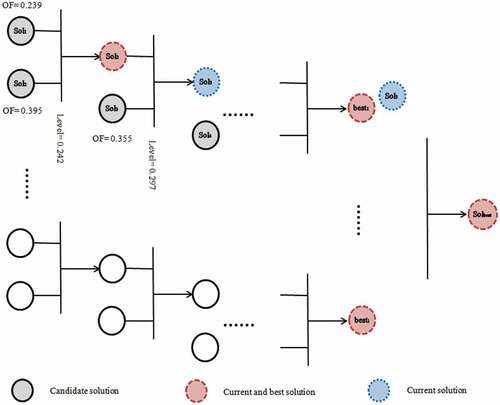
In this figure, the objective function (quality of the solution) is shown by OF. This figure shows each solution in population searches its neighborhoods separately in parallel and the best solution found by each solution is compared with the overall best solution and is updated. This process enhances the exploration ability of the algorithm.
Recurrence Operation
As it is mentioned before, there is possibility for the GD, as a local search algorithm that gets stuck in local optima. Using a population of solutions and working in different regions of the search space (first modification of GD presented in previous section) provides searching the whole regions of the search space and decrease the risk of getting stuck in local optima. In addition to this, modification and to improve this maintenance, a recurrence operation is proposed in popGD.
As it is mentioned before, the GD is the imitation of how a hill climber performs progress upwards in great deluge. The recurrence operation, as an enhancement of GD, is an imitation that the hill climber gets stuck in hill somewhere for a long time and it seems that no more progress is possible. In this time the climber decides that make a small move around even downward to find a better way to climb. In popGD, during the search process using population of single solutions in different part of search space, if after a defined number of iterations, the improvement in quality of the best solution is not observed, the recurrent operation is applied on the current solution. Recurrent operation is generation of different solutions in neighborhood of current solution and selection of the best with better quality among them and using the selected solution as current candidate solution with hope of finding a better solution compared to the best so far. This provides the possibility of the jumping from the local area and increase the opportunity of searching the search space globally. The schematic example of recurrence operation in popGD is presented in .
Figure 5. Schematic example of recurrence operation in popGD
Rate of Altering the Value of Level
Another modification to basic GD is to enhance the calculation of value of β. In basic GD, the value of β is a fixed value, which is calculated based on the quality of the initial candidate solution, the estimated quality of the final solution and the predefined number of iterations. The calculation of the value of β is performed (EquationEq. 1)(1)
(1) only once in the initialization part of the algorithm and the same value is used to update the level with linear manner in each iteration. There are two drawbacks of using this calculation (EquationEq. 1)
(1)
(1) of the value of β. Firstly the estimated quality of the final solution is slightly difficult in solving most of the problems. This may be a challenge to estimate the quality of the final solution for researchers. The second drawback is that the fixed value of β provides the algorithm with a linear boundary level, which may not really effect on finding optimum solutions. To surmount the drawbacks EquationEq. 2
(2)
(2) is proposed.
In this equation iteration is the current iteration, iterationNum is the predefined number of iterations and f(Solbest) is quality of the best solution found so far. This equation is calculated in each iteration automatically and as it is clear in this equation, it is affected from quality of best solution so far. This provides the nonlinearity of the value of β and subsequently the value of Level during the search process.
Experimental Results
In this section, results of application of the proposed method on both benchmark problems and real-world problem is presented and discussed.
Experimental Results for Benchmark Problems
This sub-section provides the results of two experiments. Firstly, the basic GD and the popGD are applied on 25 CEC 2005 benchmark test functions, and the results are compared and analyzed. In the second experiment, the results of GD and popGD are applied on 18 benchmark classification data for feature selection. The results of feature selection are used for classification and the accuracy of classification of the results are compared and analyzed. The statistical analysis is used to evaluate the performance of the popGD in both experiments.
i. Results for Test Functions
In this experiment, 25 test functions (CEC 2005 benchmark functions) were tested to assess the performance of the popGD. presents the details of the tested functions. The details in this table are: the key for the function, the name of each function, the variables value range, the category of each function, and the optimal value f(x). The unimodal (U), multimodal (M), shifted (S1), separable (S2), scalable (S3), non-separable (N), and rotated (R) are a category of CEC 2005 benchmark functions.
Table 1. Details of the CEC 2005 test functions
The methods compared in this experiment were run 100 times for each test function presented in . In order to compare the results the mean of 100 results and the standard deviation (Std. Dev.) of the results were calculated and are presented in . For the comparison purpose, the mean of 100 runs of each algorithm for each test function reported in can be compared with optimum solution given in . Note that all test functions used in this experiment are minimization problems. shows superior results of popGD compared to GD. This higher ability of popGD is due to searching the search space globally and more exploration during the search process. This ability is provided using a population of the solutions and exploring the search space by a parallel procedure of GD. This process affects searching different regions of the search space with the aim of looking for the optimum solution globally. Recurrence operation, which possibly avoids getting stuck in local optima is another reason for effectiveness of the method.
Table 2. Comparison of the results for the CEC 2005 test functions
A t-test analysis was carried out and the p-value results were computed to make a more detailed comparison. The results of this analysis are shown in . The critical value α is equal to 0.05 in this statistical analysis. The values lower than α indicate that there is a significant difference between the results of GD and popGD. The values lower than 0.05 (critical value) are presented in bold in .
Table 3. Pairwise comparison of GD and popGD for the CEC 2005 test functions
ii. Results for Feature Selection
The popGD algorithm proposed in this paper was applied to UCI classification datasets (Blake and Merz Citation1998) in order to do feature selection and later use the selected features for solving classification problem. The details of 18 UCI datasets examined in this experiment are presented in .
Table 4. List of datasets employed for feature selection
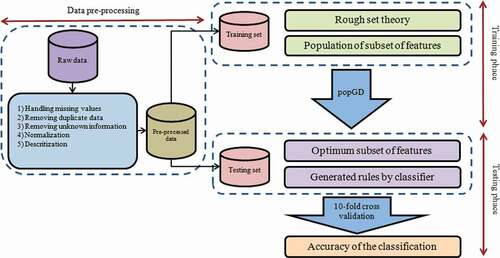
Pre-processing techniques such as handling missing values, removing noise and discretization were carried out to the raw data in order to make the data applicable to the model. In this experiment one-dimensional vector with N cells, where N was the number of features in the full feature set is used for each solution representation. Each cell held one element. Each element was assigned a value of ‘1ʹ or ‘0ʹ, where ‘1ʹ denoted the selection of the corresponding feature, otherwise ‘0ʹ.
As we applied the rough set approach for solving feature selection problem, a subset of the full feature set with a highest dependency degree (preferably equal to 1) and lowest number of features was searched. The fitness function used in this experiment is calculated based on dependency degree and a number of features and is shown in EquationEq. (3)(3)
(3) :
In this equation R represents a subset of the full feature set and C is the conditional feature set. The decision feature is shown by D and γR (D) dependency degree of D.
The overall process of this experiment is shown in . The algorithm was run 20 times in this experiment and the selection ratios (number of selected features/number of features in the full feature set) was calculated for each dataset. The average and standard deviations (Std. Dev.) of 20 ratios are shown in .
Table 5. Comparison of average selection ratio between GD and popGD
Figure 6. Overall process of feature selection and classification
The comparison of average selection ratio for the popGD and GD in shows lower average selection ratio for popGD in most of the datasets in this experiment. In order to statistical analysis and comparison, a t-test analysis was performed and the p-value results computed are shown in . The value of critical level for this experiment was equal to 0.05 same as in the t-test carried out for the test functions (in the previous sub-section). In , the values less than the value α show a major difference between the results of the popGD and the GD. The values lower than α are presented in bold in . The superiority of popGD is clearly being shown when is compared to the GD in this table. The results show that using population of single solutions in GD algorithm results a better exploration and leads the algorithm toward a superior solution. This is the reason for superior ability of the results of popGD compared to GD.
Table 6. Pairwise comparison of popGD and GD for feature selection
The Rosetta software was used to generate the rules from selected features found by GD and popGD and then the generated rules were used to classify the datasets using standard voting classifier. This process was performed for the best result of feature selection within 20 runs for all datasets. The results of classification accuracy for the GD and popGD are shown and compared in . To predict the classification accuracy the 10-fold cross-validation was performed and the dataset was divided into two parts. The 70% of the data was used in the training set and the rest 30% was used for the testing set. Better classification accuracy of popGD reported in using fewer features selected by popGD (as is shown in ) proofs the ability of popGD which uses the advantage of having population with additional recurrence operation to explore the search space.
Table 7. Results for classification accuracy using selected features by the GD and popGD
The box plot graphs presented in and graphically shows the distribution of the results of feature selection and classification accuracy, respectively. The graphs were drawn in the 30 times run. The maximum and minimum values and 50% of the data are shown in the graphs. In these graphs, the 75th percentile (presented in upper boundaries) and the 25th percentile (shown in lower boundaries) of the data are also presented. The median of the data is shown using the line in the boxes. The superiority of the results in popGD is clearly shown in both comparisons for feature selection and accuracy of classification. This shows higher ability of the popGD for exploring the search space.
Figure 7. Box plots for feature selection: (a) Breastcancer dataset, (b) BreastEW dataset, (c) CongressEW dataset, (d) Exactly dataset, (e) Exactly2 dataset, (f) HeartEW dataset, (g) IonosphereEW dataset, (h) KrvskpEW dataset, (i) Lymphography dataset, (j) M-of-n dataset, (k) PenglungEW dataset, (l) SonarEW dataset, (m) SpectEW dataset, (n)Tic-tac-toe dataset, (o) Vote dataset, (p) WaveformEW dataset, (q) WineEW dataset, and (r) Zoo dtaset
Figure 8. Box plots for classification accuracy: (a) Breastcancer dataset, (b) BreastEW dataset, (c) CongressEW dataset, (d) Exactly dataset, (e) Exactly2 dataset, (f) HeartEW dataset, (g) IonosphereEW dataset, (h) KrvskpEW dataset, (i) Lymphography dataset, (j) M-of-n dataset, (k) PenglungEW dataset, (l) SonarEW dataset, (m) SpectEW dataset, (n)Tic-tac-toe dataset, (o) Vote dataset, (p) WaveformEW dataset, (q) WineEW dataset, and (r) Zoo dtaset
The results of popGD are compared with most well known algorithms (GA and PSO) as well as most recently proposed (ALO and WOA-CM) (Mafarja and Mirjalili Citation2018) in . In this table, average selection ratio for the algorithms is presented.
Table 8. Comparison of average selection ratio between popGD and other methods in literature
The Friedman test was applied to results presented in to analysis the results statistically. This analysis determines whether there are any major differences between the compared methods. The result computed for Friedman test was equal to 35.08889. Since this result was higher than critical value 9.49, the null hypothesis was rejected. Therefore, based on this result, it was concluded that there is a significant difference between the results obtained by the compared methods in . As post-hoc test the Nemenyi test was performed to determine where the differences are located. The minimum significant difference (MSD) was calculated and it was equal to 0.08441. The results of Nemenyi test are shown in . The values higher than the MSD, which shows the location of significant differences, are shown in bold in this table.
Table 9. Nemenyi test results for feature selection
The results of classification accuracy, which is obtained using features selected by the popGD were compared with other methods in the literature which are WOA-CM, ALO, PSO, GA and the full feature set in . Presented results in this table show that popGD is able to obtain comparable results with other methods in the literature.
Table 10. Comparison of classification accuracy between popGD and other methods in literature
Same as verification of feature selection results the classification accuracy results presented in were also verified using the Friedman test as statistical analysis. The Friedman test result was 19.31746. This result was higher than the critical value 10.57 hence there was an important difference in the performance of the tested methods. Therefore, the Nemenyi post-hoc test was performed, and the results are shown in . The MSD was equal to 0.062466. The values in greater than this value are presented in bold.
Table 11. Nemenyi test results for classification accuracy
Experimental Results for Real-world Academician Publication Data
This section presents primary experiment of an ongoing research which is conducting on real-world academician data. This research focuses on the classification of academician performance when publication output is considered. The data consist of 61 features and 26,534 objects from year 2006 to 2018 which is the result of integration of data from database of different systems as: student information, human resource management, publication management, leave management, and research and innovation management. The class feature consists of publication status: i) Non performer, ii) Meet expectation.
In the first step of research, data pre-processing was required to be performed on raw data. The missing values were handled and two features with too much number of missing values were removed. Discretization for 14 features was carried out to prepare the data for feature selection and classification.
The popGD proposed in this paper was run for 100 iterations to select the features. The method selected 19 features. The Rosetta software was employed the find the classification accuracy of the selected features. The selected features were imported into the Rosetta and the rules were generated using the selected features. Having generated rules and standard voting classifier in Rosetta the data were classified with 97.7123% accuracy of classification. The details of the results are shown in .
Table 12. Results of academician publication output data
List of selected features are as follows:
Year
Gender
Cluster of field
Number of published proceedings
Number of published international proceedings
Number of published book chapters
Number of used sick leaves (days)
Number of leaves (remaining days)
Number of master students under supervision
Number of invitation as experts
Number of attendance in national conferences
Number of attendance in international conferences
Number of invitation as speakers (national)
Number of completed research grants
Number of published ISI journals
Number of published in Q1 journals
Number of published non indexed journals
Number of published article in non indexed journals as main author
Number of published article in non indexed journals as correspondence author
Based on this result, the popGD was able to reduce the number of features with less information loss and high accuracy of the classification.
Conclusion
In this paper, a population-based great deluge, popGD algorithm was proposed to aid the algorithm to search the whole area of search space. In proposed algorithm, a population of single solutions was used to explore different regions of the search space in which each solution which was randomly located in different regions of the search space does the searching locally in a neighborhood of itself. Many local searches in different places of the search space results exploring the search space and enhances the ability of the algorithm in the optimization problem. Furthermore, a recurrence operation was adapted in order to provide possibility of the jumping from local area. In addition, a nonlinear Level with independency to estimation of quality of final solution was provided. This enhancement was confirmed by a statistical analysis of the performance of the algorithm, when it was applied to 25 CEC 2005 test functions. The higher ability of the popGD was also proved by comparing its performance with that of the basic GD and other available methods in the literature when applied to 18 benchmark feature selection problems. In addition, the classification accuracy produced by using the features selected by the popGD was better or comparable to that of the basic GD and other methods in the literature. Finally, popGD was applied to real-world academician publication data for feature selection and publication output was classified. High accuracy of the classification in this experiment provided a motivation to continue this study to improve the performance of the method and comparing the results with other methods in the literature using validated results of the method. This is considered as future work of this study.
Acknowledgements
This work was supported by the National University of Malaysia [GUP-2020-091].
Additional information
Funding
References
- Abdolrazzagh-Nezhad, M., and S. Izadpanah. 2016. A modified electromagnetic-like mechanism for rough set attribute reduction. Paper read at Information and Software Technologies, Cham.
- Abdullah, S., and N. S. Jaddi. 2010. Great deluge algorithm for rough set attribute reduction. Paper read at Database Theory and Application, Bio-Science and Bio-Technology.
- Abusamra, H. 2013. A comparative study of feature selection and classification methods for gene expression data of glioma. Procedia Computer Science 23:5–14. https://doi.org/https://doi.org/10.1016/j.procs.2013.10.003.
- Acan, A., and Ü. Ahmet. 2020. Multiobjective great deluge algorithm with two-stage archive support. Engineering Applications of Artificial Intelligence 87:103239. https://doi.org/https://doi.org/10.1016/j.engappai.2019.103239.
- Aljarah, I., M. Mafarja, A. A. Heidari, H. Faris, Y. Zhang, and S. Mirjalili. 2018. Asynchronous accelerating multi-leader salp chains for feature selection. Applied Soft Computing 71:964–79. https://doi.org/https://doi.org/10.1016/j.asoc.2018.07.040.
- Anter, A. M., and M. Ali. 2020. Feature selection strategy based on hybrid crow search optimization algorithm integrated with chaos theory and fuzzy c-means algorithm for medical diagnosis problems. Soft Computing 24 (3):1565–84. doi:https://doi.org/10.1007/s00500-019-03988-3.
- Arora, S., and P. Anand. 2019. Binary butterfly optimization approaches for feature selection. Expert Systems with Applications 116:147–60. doi:https://doi.org/10.1016/j.eswa.2018.08.051.
- Bai, L., Z. Han, J. Ren, and X. Qin. 2020. Research on feature selection for rotating machinery based on Supervision Kernel Entropy Component Analysis with Whale Optimization Algorithm. Applied Soft Computing 92:106245. doi:https://doi.org/10.1016/j.asoc.2020.106245.
- Baykasoglu, A. 2012. Design optimization with chaos embedded great deluge algorithm. Applied Soft Computing 12 (3):1055–67. doi:https://doi.org/10.1016/j.asoc.2011.11.018.
- Baykasoglu, A., Z. D. U. Durmusoglu, and V. Kaplanoglu. 2011. Training fuzzy cognitive maps via extended great deluge algorithm with applications. Computers in Industry 62 (2):187–95. doi:https://doi.org/10.1016/j.compind.2010.10.011.
- Blake, C. L., and C. J. Merz. UCI repository of machine learning databases 1998. Available from http://www.ics.uci.edu/~mlearn/.
- Chen, Y., D. Miao, and R. Wang. 2010. A rough set approach to feature selection based on ant colony optimization. Pattern Recognition Letters 31 (3):226–33. doi:https://doi.org/10.1016/j.patrec.2009.10.013.
- Derrac, J., C. Cornelis, S. García, and F. Herrera. 2012. Enhancing evolutionary instance selection algorithms by means of fuzzy rough set based feature selection. Information Sciences 186 (1):73–92. doi:https://doi.org/10.1016/j.ins.2011.09.027.
- Dueck, G. 1993. New optimization heuristics: The great deluge algorithm and the record-to-record travel. Journal of Computational Physics 104 (1):86–92. doi:https://doi.org/10.1006/jcph.1993.1010.
- Emary, E., H. M. Zawbaa, and A. E. Hassanien. 2016. Binary ant lion approaches for feature selection. Neurocomputing 213:54–65. doi:https://doi.org/10.1016/j.neucom.2016.03.101.
- Han, J., M. Kamber, and J. Pei. 2011. Data Mining: Concepts and Techniques. Morgan Kaufmann Publishers Inc, Waltham, MA, USA.
- Jaddi, N. S., and S. Abdullah. 2013a. Hybrid of genetic algorithm and great deluge for rough set attribute reduction. Turkish Journal of Electerical Engineering and Computer Sciences 21 (6):1737–50. doi:https://doi.org/10.3906/elk-1202-113.
- Jaddi, N. S., and S. Abdullah. 2013b. An Interactive Rough Set Attribute Reduction Using Great Deluge Algorithm. Paper read at Advances in Visual Informatics. Springer, Cham, New York City. https://doi.org/https://doi.org/10.1007/978-3-319-02958-0_27.
- Jaddi, N. S., and S. Abdullah. 2013c. Nonlinear great deluge algorithm for rough set attribute reduction. Journal of Information Science and Engineering 29:49–62.
- Kabir, M. M., M. Shahjahan, and K. Murase. 2012. A new hybrid ant colony optimization algorithm for feature selection. Expert Systems with Applications 39 (3):3747–63. doi:https://doi.org/10.1016/j.eswa.2011.09.073.
- Lai, C., J. T. R. Marcel, and L. Wessels. 2006. Random subspace method for multivariate feature selection. Pattern Recognition Letters 27 (10):1067–76. doi:https://doi.org/10.1016/j.patrec.2005.12.018.
- Liang, J., F. Wang, C. Dang, and Y. Qian. 2014. A group incremental approach to feature selection applying rough set technique. IEEE Transactions on Knowledge and Data Engineering 26 (2):294–308. doi:https://doi.org/10.1109/tkde.2012.146.
- Lin, S.-W., Z.-J. Lee, S.-C. Chen, and T.-Y. Tseng. 2008. Parameter determination of support vector machine and feature selection using simulated annealing approach. Applied Soft Computing 8 (4):1505–12. doi:https://doi.org/10.1016/j.asoc.2007.10.012.
- Mafarja, M., S. Abdullah, and N. S. Jaddi. 2015. Fuzzy population-based meta-heuristic approaches for attribute reduction in rough set theory. World Academy of Science, Engineering and Technology, International Journal of Computer, Electrical, Automation, Control and Information Engineering 9 (12):2065–73.
- Mafarja, M., I. Aljarah, A. A. Heidari, H. Faris, P. Fournier-Viger, L. Xiaodong, and S. Mirjalili. 2018. Binary dragonfly optimization for feature selection using time-varying transfer functions. Knowledge-Based Systems 161:185–204. doi:https://doi.org/10.1016/j.knosys.2018.08.003.
- Mafarja, M., and S. Mirjalili. 2018. Whale optimization approaches for wrapper feature selection. Applied Soft Computing 62:441–53. doi:https://doi.org/10.1016/j.asoc.2017.11.006.
- Mafarja, M., A. Qasem, A. A. Heidari, I. Aljarah, H. Faris, and S. Mirjalili. 2020. Efficient hybrid nature-inspired binary optimizers for feature selection. Cognitive Computation 12 (1):150–75. doi:https://doi.org/10.1007/s12559-019-09668-6.
- Mafarja, M. M., and S. Mirjalili. 2017. Hybrid whale optimization algorithm with simulated annealing for feature selection. Neurocomputing 260:302–12. doi:https://doi.org/10.1016/j.neucom.2017.04.053.
- McCollum, B., P. McMullan, A. J. Parkes, E. K. Burke, and S. Abdullah. 2009. “An extended great deluge approach to the examination timetabling problem.” Proceedings of the 4th multidisciplinary international scheduling: Theory and applications 2009 (MISTA 2009): 424–34, Dublin, Ireland.
- Mcmullan, P. 2007. An extended implementation of the great deluge algorithm for course timetabling. Paper read at International Conference on Computational Science, Springer, Berlin, Heidelberg, New York City.
- Meiri, R., and J. Zahavi. 2006. Using simulated annealing to optimize the feature selection problem in marketing applications. European Journal of Operational Research 171 (3):842–58. doi:https://doi.org/10.1016/j.ejor.2004.09.010.
- Mosbah, A. B., and T.-M. Dao. 2010. Optimimization of group scheduling using simulation with the meta-heuristic extended great deluge (EGD) approach. Paper read at Industrial Engineering and Engineering Management (IEEM), 2010 IEEE International Conference on, Macao, China.
- Nahas, N., A. Khatab, D. Ait-Kadi, and M. Nourelfath. 2008. Extended great deluge algorithm for the imperfect preventive maintenance optimization of multi-state systems. Reliability Engineering & System Safety 93 (11):1658–72.
- Nourelfath, M., N. Nahas, and B. Montreuil. 2007. Coupling ant colony optimization and the extended great deluge algorithm for the discrete facility layout problem. Engineering Optimization 39 (8):953–68. doi:https://doi.org/10.1080/03052150701551461.
- Pawlak, Z. 1982. Rough sets. International Journal of Computer & Information Sciences 11 (5):341–56. doi:https://doi.org/10.1007/bf01001956.
- Rodrigues, D., L. A. M. Pereira, R. Y. M. Nakamura, K. A. P. Costa, X.-S. Yang, A. N. Souza, and J. P. Papa. 2014. A wrapper approach for feature selection based on Bat Algorithm and Optimum-Path Forest. Expert Systems with Applications 41 (5):2250–58. doi:https://doi.org/10.1016/j.eswa.2013.09.023.
- Tahir, M. A., A. Bouridane, and F. Kurugollu. 2007. Simultaneous feature selection and feature weighting using Hybrid Tabu Search/K-nearest neighbor classifier. Pattern Recognition Letters 28 (4):438–46. doi:https://doi.org/10.1016/j.patrec.2006.08.016.
- Tubishat, M., M. A. M. Abushariah, N. Idris, and I. Aljarah. 2019. Improved whale optimization algorithm for feature selection in Arabic sentiment analysis. Applied Intelligence 49 (5):1688–707. doi:https://doi.org/10.1007/s10489-018-1334-8.
- Zeng, A., L. Tianrui, D. Liu, J. Zhang, and H. Chen. 2015. A fuzzy rough set approach for incremental feature selection on hybrid information systems. Fuzzy Sets and Systems 258:39–60. doi:https://doi.org/10.1016/j.fss.2014.08.014.
- Zhang, H., and G. Sun. 2002. Feature selection using tabu search method. Pattern Recognition 35 (3):701–11. doi:https://doi.org/10.1016/S0031-3203(01)00046-2.
- Zhang, Y., L. Hai-Gang, Q. Wang, and C. Peng. 2019. A filter-based bare-bone particle swarm optimization algorithm for unsupervised feature selection. Applied Intelligence 49 (8):2889–98. doi:https://doi.org/10.1007/s10489-019-01420-9.
- Zhang, Y., S. Wang, P. Phillips, and J. Genlin. 2014. Binary PSO with mutation operator for feature selection using decision tree applied to spam detection. Knowledge-Based Systems 64:22–31. doi:https://doi.org/10.1016/j.knosys.2014.03.015.
- Zhong, N., J. Dong, and S. Ohsuga. 2001. Using rough sets with heuristics for feature selection. Journal of Intelligent Information Systems 16 (3):199–214. doi:https://doi.org/10.1023/a:1011219601502.
- Zhu, Z., Y. S. Ong, and M. Dash. 2007. Wrapper–filter feature selection algorithm using a memetic framework. IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics) 37 (1):70–76. doi:https://doi.org/10.1109/tsmcb.2006.883267.