
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
This study mainly discusses extended admissibility and fuzzy parallel distributed compensation (PDC) control issues for discrete singular fuzzy systems with multiple difference matrices existing in the rules. By the overall system associated with the discrete singular models with multiple difference matrices, we first propose an extended admissibility analysis criteria, where the new results not only involve some slack matrices but also have a less number of linear matrix inequalities’ (LMIs) constraints. Furthermore, by hiring the fuzzy PDC, explicit design criteria are further developed for the regarded system. Noticeably, the new design method can cope with controller synthesis of the admissibility and D-admissibility issues. Due to all the presented criteria are formed by the strict LMIs, we can readily evaluate them via some existing LMI solvers. Finally, two numerical examples are involved to demonstrate the applicability and the feasibility of the developed results.
Introduction
Many physical systems and industrial processes can be intrinsically formulated by nonlinear systems. But, the corresponding control issues are stubborn and hard to be treated (see, e.g., Liu, Xia, Wang, and Hao (Citation2021); Wang, Xia, Shen, Xing, and Park (Citation2021); Wang, Yang, Xia, Wu, and Shen (Citation2022); and the references therein). Based on fuzzy control with T-S fuzzy models (Tanaka and Sugeno Citation1992), we can well approximate nonlinear systems or uncertain systems by the extended formulation (Baumann and Rugh Citation1986; Tanaka and Sano Citation1994; Wang, Tanaka, and Griffin Citation1996; Chen, Wang, and Lee Citation2011; Askari and Markazi Citation2012). It can characterize the whole system by a set of fuzzy if-then rules with the consequent parts depicted by linear state models. Afterward, a lot of studies devoted to the stability analysis and stabilization for T-S fuzzy models (see, e.g., Ma, Sun, and He Citation1998; Chang and Sun Citation2003; Guerra, Kruszewski, Vermeiren, and Tirmant Citation2006; Hien Citation2010; Lam and Leung Citation2010; Liu, Gu, Tian, and Yan Citation2012; and the references therein).
Singular systems are used to describe complex systems, which can merge dynamic behaviors with algebraic dependent restrictions into a single system (Dai Citation1989; Duan Citation2010). They are also named as descriptor systems or generalized state-space systems. They have many comprehensive applications, such as electrical networks, chemical industrial processes, aerospace engineering, and social economic model (Luenberger Citation1977; Lewis Citation1986; Dai Citation1989; Jódar and Merello Citation2010; Duan Citation2010), and so on. However, the study of singular systems is more complicated than regular state-space ones, because besides the stability, we have to extra take the regularity and the causality (impulse-free for continue ones) into account (Xu and Yang Citation1999; Xu and Lam Citation2004). Furthermore, poles’ location in a specific region can directly dominate the systems’ states temporary responses and system’s performance (Juang, Hong, and Wang Citation1989; Chilali and Gahinet Citation1996; Chilali, Gahinet, and Apkarian Citation1999). Recently, some works had dealt with the D-admissibility issues for the singular systems, and proposed many applicable analysis and synthesis results (Bavafa-Toosi, Ohmori, and Labibi Citation2006; Rejichi, Bachelier, Chaabane, and Mehdi Citation2008; Huang Citation2011; Zhang Citation2013).
Accordingly, by comprising T-S fuzzy model and singular system, fuzzy singular systems are aroused in miscellaneous fields and reveal the appreciating advantage over past few years, where their consequent parts are replaced by singular systems’ models. They afford to represent an larger class of physical systems and engineering processes (Taniguchi, Tanaka, and Wang Citation2000). For discrete-time fuzzy singular systems (DFSs), many studies have achievements of admissibility analysis and controller synthesis. The DFSs with common E is firstly presented (Huang Citation2005), and less conservative result is then developed (Xu, Song, Lu, and Lam Citation2007). But, both the results need to impose a restriction in the criteria, where it usually is a nonstrict linear matrix inequality (LMI) constraint with insufficient rank and cannot be directly treated via current LMI solvers (Gahinet, Nemirovski, Jaub, and Chilali Citation1995). And, some works further addressed the DFSs subject to state delays and/or uncertainties (Li, Shi, Wu, and Zhang Citation2014; Kchaou and El-Hajjaji Citation2017; Chen and Yu Citation2021; Chen, Yu, and Jam, Citation2022). For the DFSs with multiple difference term matrices Ei, some results (Estrada-Manzo, Lendek, Guerra, and Pudlo Citation2015; Lendek, Nagy, and Lauber Citation2018; Gonzalez and Guerra Citation2019; Qiao, Li, and Lu Citation2021) needed to beforehand transfer the original systems into augmented systems’ forms with a common difference term matrix with enlarged dimensions. By imposing assumption on Ei to satisfy some prescribed forms, the proposed augmented systems thus could be equivalent to the original ones for admissibility issues. However, it needs to stress that the more restriction on difference term matrices may reduce the applicability for system modeling from physical systems. Furthermore, the past work (Huang Citation2014) could directly deal with the original DFSs with multiple difference term matrices Ei in the rules. But, the proposed admissible and design criteria needed to involve a considerable number of LMIs’ constraints, where there may bring on the conservatism for numerical evaluation.
Motivated from the above analytic contentions, this work mainly addresses extended admissibility analysis and parallel distributed compensation (PDC) control law (Tanaka and Sugeno Citation1992) for DFSs subjected to distinct difference matrices. Based on matrix algebraic and LMI approach (Boyd et al., Citation1994), we first propose extended admissibility analysis criteria for the unforced system. The proposed new results not only involve some slack matrices but also can sharply reduce the number of LMIs’ constraints, where they both are helpful to reduce the conservatism of the analysis criteria. Furthermore, by employing the fuzzy PDC, design criteria for the resulting closed-loop system are further investigated. Prominently, the proposed design approach can conduct the controller design associated with the admissible and D-admissible assurance. Due to all the developed criteria can be formulated by strict LMIs, they can readily be verified via existing LMI solvers. Two illustrative examples are involved to demonstrate the efficiency and feasibility of the presented method.
Compared with previous works, the main contribution of this work is highlighted as follows:
This work mainly proposes a fuzzy descriptor system with the perturbed derivative matrices in the rules. It can suitably transfers nonlinear and/or uncertain systems into fuzzy inference control framework.
All the presented admissibility analysis and controller design criteria can be explicitly expressed in terms of LMIs or parametric LMIs. Accordingly, we can handily verify them by current LMI solvers for the admissibility analysis or implement a fuzzy PDC control for closed-loop systems associated with the admissible assurance or the admissibility with specific decay rate of states’ responses.
The rest of this work is arranged as follows. Systems formulation and some preliminaries are described in Section 2. In Section 3, the admissibility analysis for the regarded systems is addressed. And, the PDC control with admissible and D-admissible assurance are studied in Section 4. Two numerical example are given in Section 5 to verify the validity and the applicability. Finally, we give some concluding remarks in Section 6.
Notations: The notations used in this work are fairly standard. Rn denotes the n-dimensional real Euclidean space. Rm×n denotes the sets of the m×n matrices. For a matrix MT (M-1) represents the transpose (inverse) of the matrix M. For a symmetric matrix P, P > 0 (P ≥0) represents the positive definite matrix (positive semi-definite matrix), P < 0 (P ≤0) represents the negative definite matrix (negative semi-definite matrix). det(P) means the determinant of P . deg(f(x)) means the degree of the polynomial f(x).
Systems Formulation and Preliminaries
Consider DFSs embracing multiple difference matrices Ei in the rules. The regarded fuzzy system can be represented by a set of fuzzy rules with T-S fuzzy singular systems, and the consequent parts of rules can characterize the local behaviors from a physical system. An overall system can be expressed by fuzzy reasoning with integrating all the individual models. The r rules of the fuzzy inference system can be denoted by
Rule i: If is
and
is
and …
is
Then , i = 1, 2, … , r,
where stands for the state vector,
stands for the control input, and
, j = 1, 2, …, n, is the jth premise variable,
is a fuzzy set,
is a difference term matrix and may be singular, that is,
,
and
stand for the individual system and input matrices in each rule.
An whole system can thus be integrated by
where
and is the firing rate of
in
.
To cope with the analysis and controller design issues for DFSs (1), we must beforehand involve some necessary definitions for the nominal system in the following.
Definition 2.1
(Dai, Citation1989, Huang, Citation2011):
The matrices pair
is referred to be regular such that
The matrices pair
The nominal system
The nominal system
Some previous works are involved for deriving the main results as follows.
Lemma 1
(Xu and Yang, Citation1999): The nominal singular system is asserted to be admissible iff there exist a positive definite matrix
and a compatible matrix Q satisfying
where satisfying
is of full-column rank.
Based on Lemma 2 associated with the previous symmetric equivalent issues of singular system (Sun, Zhang, Yang, and Su Citation2011), a symmetric form can be presented in the following.
Corollary 1:
The nominal singular system is asserted to be admissible if there exist a positive definite matrix
and a compatible matrix Q satisfying
where satisfying
= 0 is of full-column rank.
For the design issues, by the nonsingularity of matrix P, we can replace the matrix by PS and the following result can be directly attained.
Corollary 2:
The nominal singular system is asserted to be admissible iff there exist a positive definite matrix
and a compatible matrix Q satisfying
where satisfying
is of full-column rank.
The following result is introduced for the D-admissibility issues.
Lemma 2: (Huang Citation2011): The nominal singular system is asserted to be D-admissible iff there exist a positive definite matrix
and a compatible matrix Q satisfying
where satisfying
is of full-column rank.
Admissibility Analysis
For the unforced DFSs (1), that is, in (1), the admissibility analysis condition is first derived in the following.
Theorem 1:
The unforced DFSs (1), in (1), is asserted to be admissible, if there exists a positive definite matrix
and compatible matrices Qi ,
, satisfying
where satisfying
,
, is of full-column rank.
Proof:
Deducing from Lemma 1 for the unforced DFSs (1) with and
, and letting matrices
and
lead to
By EquationEq (6(6)
(6) ), we can attain that the above is negative definite and the regarded unforced DFSs (1) is thus ensured to be admissible from Lemma 1.
Based on Theorem 1 associated with Corollary 1, we present a symmetric form of in the following.
Corollary 3:
The unforced DFSs (1), in (1), is asserted to be admissible, if there exist a positive definite matrix
and compatible matrices Qi ,
, satisfying
where satisfying
,
, is of full-column rank.
Based on Theorem 1 associated with Lemma 2, the D-admissible criteria can be presented as follows.
Corollary 4:
The unforced DFSs (1), in (1), is asserted to be D-admissible, if there exist a positive definite matrix
and compatible matrices Qi ,
, satisfying
where satisfying
,
, is of full-column rank.
Remark 1 In contraction to the previous results (Huang Citation2014; Qiao, Li, and Lu Citation2021), the LMIs numbers constraints are (Huang Citation2014) and
(Qiao, Li, and Lu Citation2021), respectively. However, the new method in Theorem 1 not only has less LMIs, where the LMIs’ constraints number severely reduce down to
, but also introduces multiple slack matrices
in the conditions, where there both are beneficial to reduce the conservatism of admissibility conditions.
PDC Controller Design
By involving fuzzy PDC control law (Tanaka and Sugeno Citation1992), the same fuzzy sets in system (1) are employed in the PDC rules and can be represented as
Rule i: If is
and
is
and …
is
If is
and
is
and …
is
,
Then , i = 1, 2, … , r,
and the overall controller is integrated as
Substituting (9) into (1) leads to
Deducing from Theorem 1, the design criteria can be presented for the resulting closed-loop fuzzy singular system (10) in the sequel.
Theorem 2:
The discrete fuzzy closed-loop system (10) with the PDC control (9) is asserted to be admissible, if there exist a positive definite matrix , and matrices Q, Xj ,
, with appropriate dimensions satisfying
where
the matrix satisfying
,
, is of full-column rank. Then, a set of admissibilizing state feedback gains in (9) can be determined as
,
.
Proof:
Deducing from Corollary 2 for the fuzzy control system (10) with and
, we can ensure the admissibility for the resulting closed-loop system by that there exist matrices
, Q, and
with compatible dimensions satisfying
By Schur complement, the above is identical to
By and
, the above leads to
By letting , if the inequalities (11) and (12) is hold, the fuzzy control system (10) is ensured to be admissible from Corollary 2.
Furthermore, the PDC control law associated with D-admissibility is introduced in the sequel.
Theorem 3:
The discrete fuzzy closed-loop system (10) with PDC control (9) is asserted to be D-admissible, if there exist positive definite matrix , and matrices Q, Xj ,
, with appropriate dimensions satisfying
where
the matrix satisfying
,
, is of full-column rank. Then, a set of admissibilizing state feedback gains with D-admissibility
in (9) can be determined as
,
.
Proof:
Based on Lemma 2 and following the same line in Theorem 2, the proof can be similarly attained.
Remark 2: In contraction to the previous result in (Huang, Citation2014), the proposed new design approach in Theorem 2 can provide more searchable parameters’ dimensions in ,
, which is helpful to attain a set of feasible gains of
for the closed-loop DFSs (10). Furthermore, the new result can severely reduce the LMIs’ constraints from
to
.
Remark 3: For coping with the multiple difference term , the previous work (Qiao, Li, and Lu Citation2021) has to transfer the primitive system to an augment system model with a common E with extended dimensions, where the augment system not only may loose some physical behaviors in connection with the original system but also need to satisfy some extra constraints. Furthermore, the LMIs’ constraints reach a large number
, which may cause the handicap to implement a feasible controller for the considered system with numerous rules.
Remark 4. For comparing with some other works (Huang Citation2005; Xu, Song, Lu, and Lam Citation2007; Li, Shi, Wu, and Zhang Citation2014; Kchaou and El-Hajjaji Citation2017; Chen and Yu Citation2021; Chen, Yu, and Jam Citation2022), they cannot directly deal with the considered systems embracing multiple difference matrices, or need to put some extra restriction on and transfer the original system to a new system with a common E. However, by the developed design method in Theorem 2 and Theorem 3, we not only can directly cope the considered system with multiple difference terms
but also competently cope with the controller design with admissibility and D-admissibility issues. Furthermore, the proposed design conditions in EquationEq (11
(11)
(11) )-(Equation14
(14)
(14) ) all are formulated by the strict LMIs, where we can facilitate evaluating them via the existing LMI solvers for implementing the fuzzy systems with PDC control.
Illustrative Examples
For Verifying the Applicability of the Developed Results, We Give Two Illustrative Examples in the Following.
Example 1:
Consider the DFSs (1) with free input with a five fuzzy rules and three order singular models. The systems’ matrices are denoted as
Due to the considered DFSs embraces the distinct difference terms in the rules, some previous results with common difference terms are inapplicable (Huang Citation2005; Xu, Song, Lu, and Lam Citation2007; Li, Shi, Wu, and Zhang Citation2014; Kchaou and El-Hajjaji Citation2017; Chen and Yu Citation2021; Chen, Yu, and Jam Citation2022). Since the integrating difference matrices’ term is insufficient rank and cannot satisfy the prescribed form
, the previous result (Qiao, Li, and Lu Citation2021) also cannot be applicable. Furthermore, by the previous result in Theorem 1 (Huang Citation2014), we denote a matrix
satisfying
,
, and construct a set of LMIs according to Theorem 1. By hiring the current LMI solver (Gahinet, Nemirovski, Jaub, and Chilali Citation1995) for verification, we cannot attain a set of feasible solutions.
However, from Theorem 1 with a given matrix satisfying
,
, we can construct fifteen LMI constraints by EquationEq (6
(6)
(6) ). By hiring the LMI solver for verification, a set of feasible solutions can be attained as
Thus, the considered system is ensured to be admissible according to Theorem 1.
Example 2:
Consider a two rules fuzzy control system together with three order singular model as
Rule 1: If is
Then ,
Rule 2: If is
Then ,
where and
are given membership functions, shown in . The systems’ matrices in each rules can be individual depicted as
Figure 1. Membership functions and
of example 2.
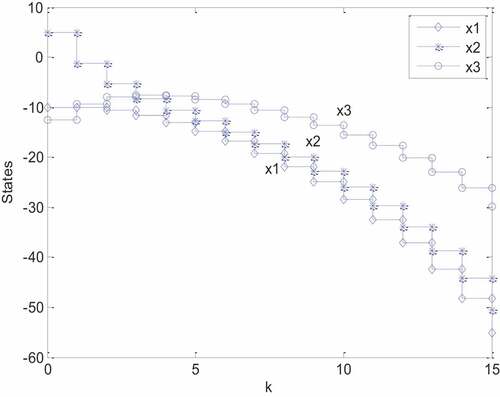
In this example, the free input system, that is, the system with , is unstable. When given an initial condition
, we firstly simulate the unforced system. The states’ behaviors are depicted in . It’s show that the original system with free input is unstable, and a controller need to be involved. Since the considered system embraces multiple difference matrices
, some existing results (Huang Citation2005; Xu, Song, Lu, and Lam Citation2007; Li, Shi, Wu, and Zhang Citation2014; Kchaou and El-Hajjaji Citation2017; Chen and Yu Citation2021; Qiao, Li, and Lu Citation2021; Chen, Yu, and Jam Citation2022) cannot be applicable for systematically conducting the PDC control. Furthermore, by the previous result in Theorem 3 (Huang Citation2014), we can form a set of LMIs with a matrix
satisfying
. But, from the LMI solver for evaluating the parameters’ intervals
and
, we cannot acquire existing feasible solutions.
Figure 2. States’ responses with free input of example 2.
However, based on Theorem 2 for controller design object, we then construct three LMIs’ constraints by (11) and (12) and denote ,
, and
where LMI variables P with ,
satisfying
,
. By the LMI solver for evaluating, a set of feasible solutions thus are obtained as
And, the admissible PDC gains can be determined by
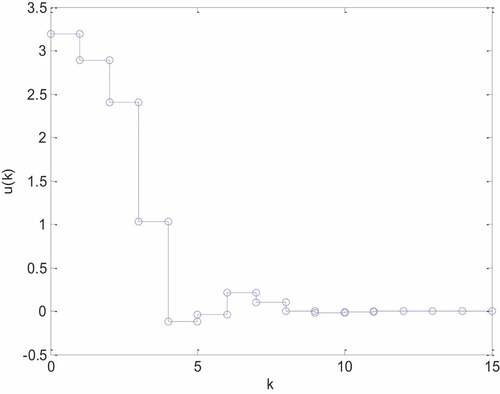
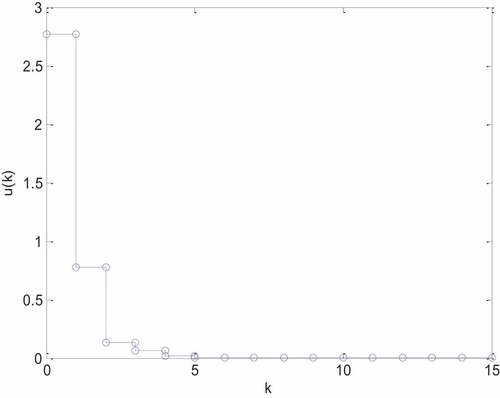
By the identical initial condition , the considered system equipped with the PDC control with admissible assurance is simulated again. The states’ responses
and the input signal
are depicted in , respectively. By observing on , it shows that all the states’ trajectories have well convergent behaviors. According to Theorem 2 and the simulation result, the considered system associated with PDC control law are experimentally demonstrated to be admissible.
Figure 3. States’ responses by PDC control with admissibility of example 2.
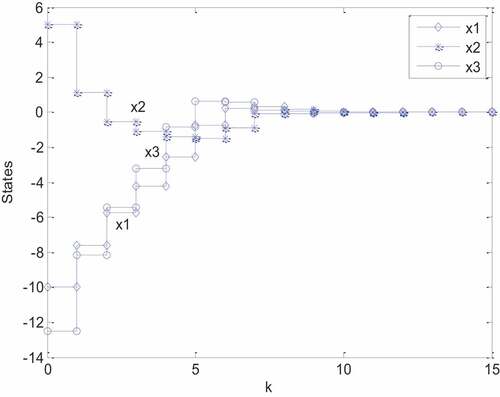
Figure 4. The control input trajectory with admissibility of example 2.
Furthermore, in practical control system, we need to implement the control law to satisfy some specific performance requirements. Based on Theorem 3, we can implement the PDC control law with D-admissibility for specific stability performance. Thus, by Theorem 3 for PDC control with D-admissibility (), we can construct three LMIs’ constraints by (13) and (14). Let
,
, and
where LMI variables P with ,
satisfying
,
. By the LMI solver for evaluating, a set of feasible solutions can be attained as
And, the PDC gains with D-admissible assurance () can be determined by
For comparison, the considered system equipped with the PDC control satisfying the D-admissibility () is simulated once more. The states’ responses
and the input signal
are individually depicted in . By observing on , it reveals that the states’ trajectories with D-admissibility (
) have more swiftly convergent behaviors than those with admissibility.
Figure 5. States’ responses by PDC control with D-admissibility () of example 2.
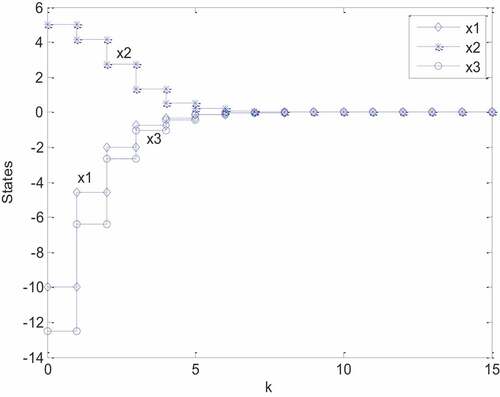
Figure 6. The control input trajectory with D-admissibility () of example 2.
Conclusions
In this study, we have coped with the admissible analysis and the PDC control for DFSs subjected to multiple difference matrices. Based on the matrix manipulation and the LMI technique, we first proposed the refined admissible analysis criteria, where the developed conditions not only involved some slack matrices but also severely reduced the number of LMIs’ constraints, where they both may be beneficial to reduce the conservatism of the analysis criteria. Moreover, by involving the fuzzy PDC control, the explicit design criteria were further presented for the resulting closed-loop system. Noticeably, the new design method can treat controller design with admissibility and D-admissibility for the regarded systems. Due to all the presented conditions were formed by the strict LMIs, they could directly be evaluated via the LMI solver. Finally, the illustrative examples were hired to demonstrate the efficiency and applicability of the proposed methods. Nevertheless, in many physical systems, state’s delays are inevitably needed to be embraced. Future work will dedicate to the analysis and design methods by simultaneously involving the state’s delays and uncertainties.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
- Askari, M., and A. H. D. Markazi. 2012. A new evolving compact optimised Takagi-Sugeno fuzzy model and its application to nonlinear system identification. International Journal of Systems Science 43 (4):776–19. doi:10.1080/00207721.2010.523798.
- Baumann, W. T., and W. J. Rugh. 1986. Feedback control of nonlinear systems by extended linearization. IEEE Transactions on Automatic Control 31 (1):40–46. doi:10.1109/TAC.1986.1104100.
- Bavafa-Toosi, Y., H. Ohmori, and B. Labibi. 2006. Note on finite eigenvalues of regular descriptor systems. IEE Proceedings - Control Theory and Applications 153 (4):502–03. doi:10.1049/ip-cta:20050125.
- Boyd, S., L. Ghaoui, E. El Feron, and V. Balakrishnan. 1994. Linear matrix inequalities in systems and control theory. Philadelphia, PA: SIAM.
- Chang, W. J., and C. C. Sun. 2003. Constrained fuzzy controller design of discrete Takagi-Sugeno fuzzy models. Fuzzy Sets and Systems 133 (1):37–55. doi:10.1016/S0165-0114(02)00276-2.
- Chen, P. C., C. H. Wang, and T. T. Lee. 2011. Robust adaptive self-structuring fuzzy control design for nonaffine nonlinear systems. International Journal of Systems Science 42 (1):149–69. doi:10.1080/00207720903494635.
- Chen, J., and J. Yu. 2021. Robust control for discrete-time T-S fuzzy singular systems. Journal of Systems Science and Complexity 34 (4):1345–63. doi:10.1007/s11424-020-0059-z.
- Chen, J., J. Yu, and H. K. Lam. 2022. New admissibility and admissibilization criteria for nonlinear discrete-time singular systems by switched fuzzy models. IEEE Transactions on Cybernetics 52 (9):9240–50. doi:10.1109/TCYB.2021.3057127.
- Chilali, M., and P. Gahinet. 1996. H∞ design with pole placement constraints: An LMI approach. IEEE Transactions on Automatic Control 41 (3):358–67. doi:10.1109/9.486637.
- Chilali, M., P. Gahinet, and P. Apkarian. 1999. Robust pole placement in LMI regions. IEEE Transactions on Automatic Control 44 (12):2257–70. doi:10.1109/9.811208.
- Dai, L. 1989. Singular control systems, lecture notes in control and information sciences (vol. 118). New York, NY: Springer-Verlag.
- Duan, G. R. 2010. Analysis and design of descriptor linear systems, ser. Advances in mechanics and mathematics. New York, NY: Springer-Verlag.
- Estrada-Manzo, V., Z. Lendek, T. M. Guerra, and P. Pudlo. 2015. Controller design for discrete-time descriptor models: A systematic LMI approach. IEEE Transactions on Fuzzy Systems 23 (5):1608–21. doi:10.1109/TFUZZ.2014.2371029.
- Gahinet, P., A. Nemirovski, A. J. Jaub, and M. Chilali. 1995. LMI control toolbox user’s guide. Natick, MA: The Mathworks Partner Series.
- Gonzalez, A., and T. M. Guerra. 2019. Enhanced predictor-based control synthesis for discrete-time TS fuzzy descriptor systems with time-varying input delays. IEEE Transactions on Fuzzy Systems 27 (2):402–10. doi:10.1109/TFUZZ.2018.2882169.
- Guerra, T. M., A. Kruszewski, L. Vermeiren, and H. Tirmant. 2006. Conditions of output stabilization for nonlinear models in the Takagi-Sugeno’s form. Fuzzy Sets and Systems 157 (9):1248–59. doi:10.1016/j.fss.2005.12.006.
- Hien, L. V. 2010. Exponential stability and stabilisation of fuzzy time-varying delay systems. International Journal of Systems Science 41 (10):1155–61. doi:10.1080/00207720903045858.
- Huang, C. P. 2005. Stability analysis of discrete singular fuzzy systems. Fuzzy Sets and Systems 151 (1):155–65. doi:10.1016/j.fss.2004.08.016.
- Huang, C. P. 2011. Analysing robust D-admissibility for discrete singular systems subjected to parametric uncertainties in the difference matrix. IMA Journal of Mathematical Control and Information 28 (3):279–89. doi:10.1093/imamci/dnr009.
- Huang, C. P. 2014. Stability analysis and controller synthesis for discrete uncertain singular fuzzy systems with distinct difference matrices in the rules. International Journal of Systems Science 45 (9):1830–43. doi:10.1080/00207721.2012.757382.
- Jódar, L., and P. Merello. 2010. Positive solutions of discrete dynamic leontief input-output model with possibly singular capital matrix. Mathematical and Computer Modelling 52 (7–8):1081–87. doi:10.1016/j.mcm.2010.02.043.
- Juang, Y. T., Z. C. Hong, and Y. T. Wang. 1989. Robustness of pole assignment in a specified region. IEEE Transactions on Automatic Control 34 (7):758–60. doi:10.1109/9.29406.
- Kchaou, M., and A. El-Hajjaji. 2017. Resilient H∞ sliding mode control for discrete-time descriptor fuzzy systems with multiple time delays. International Journal of Systems Science 48 (2):288–301. doi:10.1080/00207721.2016.1179818.
- Lam, H. K., and F. H. F. Leung. 2010. Stability analysis of fuzzy-model-based control systems, studies on fuzziness and soft computing. New York, NY: Springer-Verlag.
- Lendek, Z., Z. Nagy, and J. Lauber. 2018. Local stabilization of discrete-time TS descriptor systems. Engineering Applications of Artificial Intelligence 67:409–18. doi:10.1016/j.engappai.2017.09.006.
- Lewis, F. L. 1986. A survey of linear singular systems. Circuits, Systems, and Signal Processing 5 (1):3–36. doi:10.1007/BF01600184.
- Li, F., P. Shi, L. Wu, and X. Zhang. 2014. Fuzzy-model-based D-stability and nonfragile control for discrete-time descriptor systems with multiple delays. IEEE Transactions on Fuzzy Systems 22 (4):1019–25. doi:10.1109/TFUZZ.2013.2272647.
- Liu, J., Z. Gu, E. Tian, and R. Yan. 2012. New results on H∞ filter design for nonlinear systems with time-delay through a T-S fuzzy model approach. International Journal of Systems Science 43 (3):426–42. doi:10.1080/00207721.2010.502599.
- Liu, X., J. Xia, J. Wang, and S. Hao. 2021. Interval type-2 fuzzy passive filtering for nonlinear singularly perturbed PDT-switched systems and its application. Journal of Systems Science and Complexity 34 (6):2195–218. doi:10.1007/s11424-020-0106-9.
- Luenberger, D. G. 1977. Dynamic equations in descriptor form. IEEE Transactions on Automatic Control 22 (3):312–21. doi:10.1109/TAC.1977.1101502.
- Ma, X. J., Z. Q. Sun, and Y. Y. He. 1998. Analysis and design of fuzzy controller and fuzzy observer. IEEE Transactions on Fuzzy Systems 6 (1):41–51. doi:10.1109/91.660807.
- Qiao, L., L. Li, and Y. Lu. 2021. Parallel and nonparallel distributed compensation controller design for T-S fuzzy discrete singular systems with distinct difference item matrices. IEEE Access 9:87475–83. doi:10.1109/ACCESS.2021.3089496.
- Rejichi, O., O. Bachelier, M. Chaabane, and D. Mehdi. 2008. Robust root-clustering analysis in a union of subregions for descriptor systems. IET Control Theory & Applications 2 (7):615–24. doi:10.1049/iet-cta:20070277.
- Sun, X., Q. L. Zhang, C. Y. Yang, and Z. Su. 2011. Stability analysis and stabilization for discrete-time singular delay systems. Journal of Systems Engineering and Electronics 22 (3):482–87. doi:10.3969/j.issn.1004-4132.2011.03.017.
- Tanaka, K., and M. Sano. 1994. A robust stabilization problem of fuzzy control systems and its application to backing up control of a truck-trailer. IEEE Transactions on Fuzzy Systems 2 (2):119–34. doi:10.1109/91.277961.
- Tanaka, K., and M. Sugeno. 1992. Stability analysis and design of fuzzy control systems. Fuzzy Sets and Systems 45 (2):135–56. doi:10.1016/0165-0114(92)90113-I.
- Taniguchi, T., K. Tanaka, and H. O. Wang. 2000. Fuzzy descriptor systems and nonlinear model following control. IEEE Transactions on Fuzzy Systems 8 (4):442–52. doi:10.1109/91.868950.
- Wang, H. O., K. Tanaka, and M. F. Griffin. 1996. An approach to fuzzy control of nonlinear systems: Stability and design issues. IEEE Transactions on Fuzzy Systems 4 (1):14–23. doi:10.1109/91.481841.
- Wang, J., J. Xia, H. Shen, M. Xing, and J. H. Park. 2021. H∞ synchronization for fuzzy Markov jump chaotic systems with piecewise-constant transition probabilities subject to PDT switching rule. IEEE Transactions on Fuzzy Systems 29 (10):3082–92. doi:10.1109/TFUZZ.2020.3012761.
- Wang, J., C. Yang, J. Xia, Z. G. Wu, and H. Shen. 2022. Observer-based sliding mode control for networked fuzzy singularly perturbed systems under weighted try-once-discard protocol. IEEE Transactions on Fuzzy Systems 30 (6):1889–99. doi:10.1109/TFUZZ.2021.3070125.
- Xu, S., and J. Lam. 2004. Robust stability and stabilization of discrete singular systems: An equivalent characterization. IEEE Transactions on Automatic Control 49 (4):568–74. doi:10.1109/TAC.2003.822854.
- Xu, S., B. Song, J. Lu, and J. Lam. 2007. Robust stability of uncertain discrete-time singular fuzzy systems. Fuzzy Sets and Systems 158 (20):2306–16. doi:10.1016/j.fss.2007.05.008.
- Xu, S., and C. Yang. 1999. Stabilization of discrete-time singular systems: A matrix inequalities approach. Automatica 35 (9):1613–17. doi:10.1016/S0005-1098(99)00061-8.
- Zhang, B. 2013. Eigenvalue assignment in linear descriptor systems via output feedback. IET Control Theory & Applications 7 (15):1906–13. doi:10.1049/iet-cta.2012.0842.