
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Reversible lanes play an important role in alleviating urban traffic congestion and improving the utilization of road resources. However, most of the reversible lanes currently implemented are timed and fixed, and there is little research on the safety of reversible lanes without isolation facilities. In view of the existing problems of reversible lanes, this paper proposed a real-time dynamic reversible lane safety control model. The influencing factors of reversible lane safety control are analyzed first, and then determine model parameters of the no-entry zone and the buffer zone in the conflict area. Moreover, model parameters of emptying, exit, and recovery zones in the operation process were determined as well. Additionally, this paper discussed the length of reversible lanes and the timing of signals. The surrogate safety assessment model (SSAM) is adopted to analyze vehicle trajectory data for traffic simulation under different traffic flows. The experiment results show that the proposed reversible lane safety control scheme can keep the vehicle’s traffic conflict rate below 5%, which can effectively ensure the safe operation of the reversible lane.
Introduction
With the rapid economic and social development, the ownership and the urbanization rate continue to increase in China. As of the end of 2018, the urban resident population reached 830 million, and the urbanization rate was 59.6% (“Compiled by National Bureau of Statistics Citation2022). More and more people and vehicles gather in the city, which promotes the rapid development of the city but also brings serious traffic problems. Reversible lanes have been recognized as an effective approach to alleviating urban traffic congestion and improving road resource utilization. To minimize the overall delay of intersections, Alhajyaseen et al. (Citation2017) analyzed road geometric parameters and traffic flow data, constructed a dynamic model of the entrance lane scheme, obtained the optimum lane division plan and signal timing parameters, evaluated the effect of introducing dynamic reversible lane. From the perspective of economic and traffic benefits, Golub (Citation2012) investigated the residents’ opinions about setting the reversible lanes, and made suggestions on the design, marking and management of reversible lanes. Lalani and Baird (Citation1981) analyzed the number and types of accidents before and after the implementation of reversible lanes on a main road in Phoenix city, found that the implementation of reversible lanes would increase the probability of accidents to some extent, and gave relevant suggestions. Waleczek et al. (Citation2016) conducted an analysis of the impact of reversible lanes on road traffic flow and traffic safety, he proposed that reversible lanes can effectively reduce traffic delays and improve the traffic safety. They also analyzed the influence of the reversible lanes in the work area on traffic flow and road safety, the results showed that it can effectively reduce the traffic accidents and travel time in the work area. Zhao and Liu (Citation2017) summarized the potential safety risks of reversible lanes at intersections by using traffic data such as the timing of traffic signals and traffic accident rates as evaluation indicators, and analyzed the safety influencing factors of reversible lane. Considering the safety of reversible lanes, Hoose (Citation2005) comprehensively studied the traffic efficiency in the direction of light traffic flow and the effectiveness of the reversible lane system operation, conducted a detailed study on the reversible lane schemes and its signal control. Matthew, Au, and Peter (Citation2011) developed a linear programming model to calculate the optimal configuration of reversible lanes, they used the information collected by traffic sensors to dynamically determine the direction of the reversible lanes. The results show that the road capacity can be effectively improved. Dai (Citation2018) studied the tidal phenomenon of urban arterial roads and calculated the conditions and parameters of setting reversible lanes on the road sections based on a minimum delay model. For the reversible lanes at intersections, the collaborative setting method of reversible lanes and short-directional lanes was studied. According to the proportion of traffic flow in different directions of the intersection, the driving characteristics of the vehicle and the geometric design of the road, the rules and parameters of the short-change lane setting are determined. Moreover, the signal timing and signal phase sequence are optimized collaboratively. You (Citation2016) proposed a reversible lane guidance system with decentralized gantry, road patch and text signs, and designed a lane change organization plan. Decentralized gantry and traffic signs provide detailed reversible lane operation information, and road patch provide warning signals to the driver, ensuring the continuity displaying of the reversible lane information. Wang, Wang, and Jiang (Citation2014) analyzed the lane change behavior of vehicles at intersections. From the perspective of queuing theory, he proposed a calculation model for the length of entrance lanes at intersections considering vehicle lane changes and entering the queuing system, and calculated the appropriate length of the entrance road from the aspects of traffic delay. In consideration of traffic conditions and traffic efficiency, Zhou and Dong (Citation2009) established the maximum value model of reversible lane length of turning by integrating parameters such as vehicle lane change distance, phase signal timing and vehicle acceleration, and the timing of the main function signal lights and auxiliary function signal lights of the lane is set based on the channelization length and running speed.
There are a few limitations that have not been fully addressed in the existing literatures on the reversible lane safety control model. For most of the above researches on reversible lane safety control, signal timing control, and isolation facilities, few studies have integrated the functions of intelligent signal indicating devices and vehicle-road cooperative systems to study the safety control of real-time dynamic reversible lanes. To bridge the research gap, this paper proposed a real time-time dynamic reversible lane safety control model. The article first analyzes the factors influencing the safety control of variable vehicles under different traffic conditions, then sets the calculation formulae of each component of reversible lane safety control in road sections and intersection by combining the attributes of vehicle, driver, and road, the effectiveness of reversible lane safety control model is verified by simulation.
The rest of the paper is organized as follows. In Section 2, we analyze the influence factors of reversible lane safety control. Section 3 and Section 4 introduce the calculation formulas for each component of the safety control model at road sections and intersection, respectively. Section 5 presents the simulation experiments of the proposed model, followed by the conclusions in Section 6.
The Influencing Factors of Reversible Lane Safety Control
Road
The number of road lanes, plane alignment, markings, road conditions, and signals at intersections will all have a certain impact on the vehicle’s driving status and the safe operation of reversible lanes. Based on the different classification levels of urban roads, their corresponding design speed is shown in . The design speed of the intersection is generally 0.5–0.7 times the road section.
Table 1. Design speed of all levels of road.
In the process of driving, the driver makes adjustments according to the number of lanes, width of lanes, traffic flow status, etc. When there are more lanes on the road, the driver has many lane choices for driving, and it is not necessary to produce a forced lane change behavior due to the introduction of the reversible lane. When the width of the lane is wider, the lateral distance between the vehicle and the vehicle increases, and the lateral vehicle has less influence on the driving state of the driver; when the width of the lane is narrower, the influence between the vehicles will become larger (Ma Citation2018).
Vehicles
There are many types of vehicles on urban roads, with complex compositions, and great speed differences. The composition of vehicles in the city mainly includes sedans, buses, SUVs and trucks, etc. Different vehicles have different driving speeds, acceleration performances, and turning radius. shows the maximum acceleration of different types of vehicles in different sections and the distance used for acceleration calculation in this section (Liu and Sun 2018).
Table 2. The maximum acceleration in different speed intervals and the distance used to accelerate calculation.
Drivers
The driver is an important participant in real-time dynamic reversible lane operation. The correct perception, analysis, judgment, and operation of the road information by drivers are important conditions for ensuring the safe operation of the reversible lane. In the real-time dynamic reversible lane safety control model, the driver’s visual characteristics and reaction characteristics are an important basis for determining parameters. The American Association of State Highway and Transportation officials requires the use of 2.5 seconds in most calculations involving braking response. The Institute of Transportation Engineers suggested that the reaction time of intersection signal control should be 1.0s.
Differences in driver’s gender, age, and behavior will have an important impact on reversible lane safety control. Most males are more capable of responding to maneuvers and judging road traffic conditions than females, but some males also have bad driving behaviors such as speeding and forced lane changes. With the increase of age, the driver’s reaction operation time and vision recovery time will increase significantly.
Safety Control of Real-Time Dynamic Reversible Lanes in Road Sections
Conflict Zone
The conflict zones of reversible lanes are divided into a conflict zone at the starting point and a conflict zone at the end point. Its function is to enable the vehicle in both directions to complete the lane change without contradiction and ensure the safe operation of the reversible lane. The conflict zone at the starting point consists of a forbidden zone, which doesn’t allow any vehicles to enter. The end-point conflict zone is composed of 2 buffer zones and 1 forbidden zone. Vehicles can complete lane changes or temperately stay in the buffer zone to wait for lane changes. No vehicles are allowed to enter the prohibited zone. The illustrations of two types of conflict zones are shown in (b).
Figure 1. (a) conflict zone at the starting point (b) conflict zone at the end point.
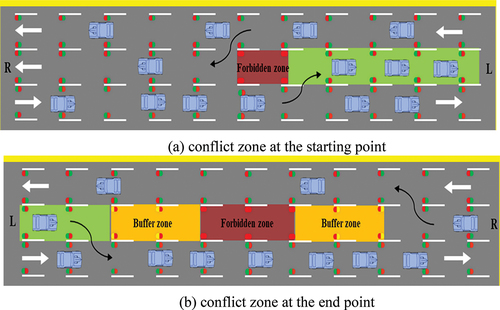
In the conflict zone of the starting point of the reversible lane, there is no direct conflict between vehicles from opposite directions. The distance of conflict zone at the starting point could be determined by the safety distance of the vehicle and the laying interval of the road studs, which is generally 5-10 m. The end conflict zone includes the forbidden zone and the buffer zone. The forbidden zone is calibrated according to the driver’s sight distance,
Where is the driving speed of the vehicle,
is the reaction time of the driver,
and
are the reaction distance of the vehicles from opposite directions respectively,
is the acceleration of gravity,
is the coefficient of adhesion of the wheel on the road,
and
are the braking distance of the vehicle from opposite directions respectively,
is the safety distance,
is the length of the forbidden zone.
The buffer zone is determined based on the driving distance when changing lanes and braking distance,
Among them, is the driving speed of the vehicle,
is the speed of the vehicle after braking,
is the deceleration of the vehicle,
is the driver’s cautious coefficient in the process of driving the vehicle to change lanes,
is the weighted coefficient of the road traffic flow status,
is the traffic flow density,
is the congested density,
is the reaction distance,
is the braking distance,
is the wheel’s adhesion coefficient,
is the vehicle’s lane change distance,
the vehicle’s total braking distance,
is the safety distance,
is the buffer zone length.
Control Flow Parameters
The real-time dynamic reversible lane safety control parameters of the road section include clearance time, exit, and recovery time. In the clearing phase, guided by the smart road patch signal, the vehicles in the direction of light traffic flow are driven away from the reversible lane that is about to open, ensuring that there are no facing vehicles in the reversible lane. After the emptying is completed, the smart road patches direct the heavy traffic to drive into the reversible lane. When the conditions for the continuous operation of the reversible lane are not met, the lane is about to be closed, and the smart road patches guide the vehicles driving in the reversible lane to leave in an orderly manner. When all the vehicles have left, the smart road patches will return to the initial indication state, and the vehicle in the original direction can drive into the lane and drive normally. The clearing time formula is,
Among them, is the time required for the vehicle to leave the lane,
is the color conversion time of the smart road patch,
is the safety time,
tracks the emptying time of the vehicle,
is the safety factor,
is the reversible lane length,
is the speed of vehicles,
is the time that the vehicle normally travels through the reversible lane.
is the reversible lane emptying time of the road section.
The exit and recovery time formula is,
Among them, is the time required for the vehicle to leave the lane,
is the color change time of the smart road patch,
is the safety time,
is the reversible lane exit and recovery time.
Safety Control of Real-Time Dynamic Reversible Lanes at Intersection
Reversible Guide Lane
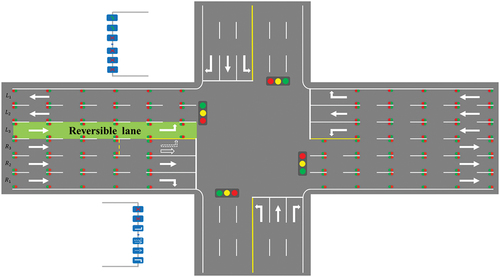
Reversible lanes can alleviate left-turn and straight-through traffic flow congestion. Its position is not fixed. It can be set on the left-hand left lane or in the middle straight lane. When setting the reversible guide lane at the intersection, the function of the lane needs to be dynamically changed. In this paper, the method of pre-parking line is used to dynamically divide the lane function, based on the timing of the main signal and the pre-signal, then the lane functions are dynamically divided to ensure the safe and efficient operation of the reversible guidance lane. The configuration of a reversible guide lane is shown in .
Figure 2. Reversible guide lanes at intersections.
The Length of Reversible Guide Lanes
The setting of the reversible guide lane should not only ensure the operating efficiency of the lane but also the vehicles entering the reversible guide lane in the signal phase must leave in time. The length of the reversible guide lane includes the channelized solid line section and the transition section.
Under the premise that the signal period is fixed, the queue length of a signal phase allowed to pass through the number of vehicles at the intersection is,
Where is the saturation flow rate of the phase,
is the effective green light time,
is the signal cycle,
is the body length of the vehicle,
is the safety distance between the vehicles,
is the number of vehicles that can pass in the green light phase time.
Then the length of the reversible guide lane is:
Among them, is the minimum length of the canalization solid line at the intersection,
the maximum queuing length of vehicles with different steering at the intersection during peak hours,
is the queuing length of the number of vehicles that can pass in a phase time at the intersection,
is the length of the canalization solid line section of the reversible guide lane.
is the length of the transition zone,
the length of the reversible lane.
Pre-signal parameters
At urban road intersections, the intersections with reversible lanes must have dedicated left-turn phases and left-turn lanes. Taking the 4-phase intersection as an example, the relationship between the main signal and the pre-signal of the reversible guide lane is discussed. The signal phase sequence is to go straight first, then turn left. There are three canalized lanes at the entrance of the signalized intersection. From left to right, there are dedicated lanes for turning left, going straight, and turning right. If the left-turn dedicated lane is changed to a left-turn and straight-through reversible lane, when the left turn phase green light, this lane is a left-turn dedicated lane, and when the straight green light is on, this lane is a straight lane.
The pre-signal straight green light’s early turn-off time is,
Among them, is the early turn-off time of the straight green light,
is the length of the reversible lane,
is the distance from the intersection stop line to the straight conflict point,
is the average speed of the vehicle passing through the intersection,
is the safety time.
The pre-signal left turn green light’s early turn-on time is:
Among them, is the reversible lane length,
is the vehicle’s starting acceleration,
is the safe time.
The pre-signal left turn green light’s early off time is:
Among them, is the turn-off time of the left turn green light;
is the length of the reversible lane;
is the distance from the intersection stop line to the left turn conflict point;
is the average speed of the vehicle passing through the intersection,
is the safety time.
Control Flow
The control flow of the reversible guide lane includes emptying, operation and judgment. The control flow chart is shown in . It can effectively ensure the safety and smoothness of the reversible guide lane during the operation. The process includes five stages, and the specific functions of each phase are as follows:
Figure 3. Control flow chart of reversible guidance lane.
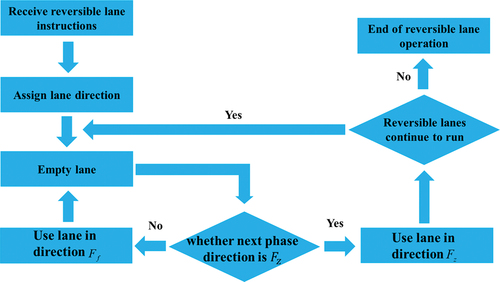
Phase 1: Receive the reversible lane change instruction, mark the reversible lane as , so that the original channelization direction of the lane is the main functional direction, denoted as
; the convertible channelization direction is the secondary function direction, denoted as
. The timing and phase sequence of the pre-signal is calculated according to the traffic conditions at the intersection. In order to facilitate the storage of vehicles in reversible lanes, the signal phase sequence is the secondary function phase sequence first, and then the main function phase sequence.
Phase 2: First clear the reversible lanes. Before the green light of the main function phase ends, the pre-signal shows a red light, Vehicles in the direction stop before the pre-signal stop line. It is forbidden to drive the vehicle into the reversible lane.
Phase 3: The lane is converted into a secondary function channelized lane, Vehicles in direction enter the reversible lane. Before the end of the green signal of the secondary function signal phase, the reversible lane is closed in advance and all vehicles are prohibited from entering.
Phase 4: Before the green light of the main function signal starts, the reversible lane is turned on in advance, Vehicles in direction enter the reversible lane.
Phase 5: Determine whether the reversible lane continues to run. If it continues to run, return to Phase 2 for sequential control. If the operation ends, the reversible lane pre-signal indicator turns off and the reversible lane resumes the main function of channelization.
Real-Time Dynamic Reversible Lane Safety Control Evaluation
Taking the real-time dynamic reversible lanes in road sections as an example, setting different safety control parameters according to different vehicle states. Establish and simulate a reversible lane model in VISSIM simulation software, collect vehicle trajectory data in the simulation process, and use surrogate safety assessment model software to analyze vehicle trajectory data, according to the time to collision (TTC) and post encroachment time (PET) to determine whether there will be traffic conflicts between vehicles, and classify the traffic conflicts. In the model, the time to collision adopts the recommended value of 1.5s, the post encroachment time adopts the recommended value of 5.0s, and the rear-end collision angle threshold and the forward collision angle threshold adopt the software default value (Ding Citation2015).
In this paper, an urban road with a speed limit of 60 km/h is selected as the experimental scene. The driver’s response is that the default time is 2.5s and the maximum vehicle acceleration is 2.5 m/s2. The safety control parameters of reversible lane under different traffic demands are analyzed by simulation experiment.
shows the traffic conflict rate under different traffic flows. The traffic conflict rate increases with the increase in traffic flow, but all are less than 5%. The types of conflicts are rear-end conflicts and lane-change conflicts, the safe and orderly operation of the reversible lane can be guaranteed. , and analyze the traffic conflict parameters under traffic conditions of 3600pcu/h, 4050pcu/h, and 4500pcu/h respectively. In the vehicle operation data of conflicts, obtain the average value of the time to conflict, the post encroachment time, and the maximum speed of the vehicle through the conflict point (MaxS), which can reflect the change of conflict parameters of different types of conflicts (Bai, Yang, and Song Citation2008).
Table 3. Traffic conflict rate under different traffic flow.
Table 4. Traffic conflict parameters when the flow rate is 3600pcu/h.
Table 5. Traffic conflict parameters when the flow rate is 4050pcu/h.
Table 6. Traffic conflict parameters when the flow rate is 4500pcu/h.
When the traffic volume continues to increase, the average distance of rear-end collisions among conflicting vehicles gradually decreases, which is 0.97, 0.72, and 0.41, respectively, indicating that the possibility of collisions of vehicles becomes higher; The average time to collision of lane change conflicts is unchanged after the flow reaches 4050pcu/h, but when the traffic increases, the number of lane change conflicts has increased significantly, and their proportion in the total conflicts is 40%, 55%, 46%. During the operation of reversible lanes, the driver should be reminded to keep a safe distance between vehicles and avoid rear-end collisions. At the same time, when the traffic volume is large, certain restrictive measures should be taken to reduce the lane-changing behavior of the vehicle and thereby reduce the inter-vehicle Conflict of lane changes.
Conclusions
This paper analyzes the main influencing factors of the reversible lane safety control. Combining with the real-time dynamic reversible lane design scheme, a real-time dynamic reversible lane safety control model is proposed. Then build a safety control model of reversible lanes in the road section, including the setting parameters of the forbidden zone and the buffer zone in the conflict zone, and the control parameters of emptying, running, exiting, and resuming in the reversible lane operation process. Continue to build a safety control model for reversible lanes at intersections, including reversible guide lanes, and discuss the length of the lanes and timing of pre-signals. Finally, the surrogate safety assessment model is used to analyze the vehicle trajectory data of traffic simulation under different traffic flows. The results show that the reversible lane safety control scheme can effectively ensure the safe operation of the reversible lane.
The real-time dynamic reversible lane safety control model is still only in the preliminary traffic analysis stage. In the face of the impact of different driving environments, vehicles, and pedestrians, the model needs to be further optimized and improved. In addition, the reversible lane safety control model also needs to be coordinated with the reversible lane change model, information management system, signal control system, etc., so that the real-time dynamic reversible lane scheme can be effectively implemented.
Acknowledgements
Lina Mao conceived and designed the paper; Lina Mao and Guiliang Zhou wrote the paper; Tianwen Bao and Jin Dai conducted the model and collected traffic data. Jin Dai and Xu Bao analysed the results.
Disclosure Statement
No potential conflict of interest was reported by the author(s).
Data Availability Statement
The data used to support the findings of this study are included within the article.
Additional information
Funding
References
- Alhajyaseen, W.-K.-M., M. Najjar, N.-T. Ratrout, and K. Assi. 2017. The effectiveness of applying dynamic lane assignment at all approaches of signalized intersection. Case Studies on Transport Policy 5 (2):65–14. doi:10.1016/j.cstp.2017.01.008.
- Bai, Z.Y., X.-G. Yang, and G.-H. Song. 2008. Failure analysis and improvement methods of safety evaluation of traffic conflicts at intersections. Chinese Journal of Safety Science 2: 157–79.
- Compiled by National Bureau of Statistics. China Statistical Yearbook. Last Modified January 1, 2019. Accessed October 11, 2022.http://www.stats.gov.cn/tjsj/ndsj/2019/indexch.htm
- Dai, X. 2018.Study on the characteristics and setting methods of tidal lane traffic flow on urban main line. PhD diss., Changan University.
- Ding, J. 2015.Research on the Reversible Guide Lane of Signal Control Intersection. PhD diss., Dalian University.
- Golub, A. 2012. Perceived costs and benefits of reversible lanes in phoenix. Arizona-Institute of Transportation Engineers 82: 38–42.
- Hoose, H.-J. 2005. Planning effective reversible lane control. TIE Journal 17: 408–13.
- Lalani, N., and A.-L. Baird. 1981. Right way for wrong way driving. ITE Journal 11: 16–24.
- Ma, Y.-Y. 2018. Research on vehicle lane-changing behavior and driving assistance system based on vehicle-road collaboration. PhD diss., Qingdao Technological University.
- Matthew, H., T.-C. Au, and S. Peter. 2011. Dynamic Lane Reversal in Traffic Management. 14th International IEEE Conference on Intelligent Transportation Systems, Washington, DC, USA, 1927–34.
- Waleczek, H., J. Geistefeldt, D. Cindricmiddendorf, and G. Riegelhuth. 2016. Traffic flow at a freeway work zone with reversible median lane. Transportation Research Procedia 15:257–66. doi:10.1016/j.trpro.2016.06.022.
- Wang, T.-Y., W.-H. Wang, and X.-B. Jiang. 2014. Optimization design of intersection entrance road based on vehicle lane-changing behavior and queuing theory. Road Traffic and Safety 6: 42–45.
- You, S.-K. 2016. Optimized design of reversible lane guidance signs and organization schemes. Bei Jing: Urban Transportation Planning Academic Committee of China Urban Planning Society 1938–45.
- Zhao, J., and Y. Liu. 2017. Safety evaluation of intersections with dynamic use of exit- lanes for left- turn using field data. Accident Analysis & Prevention 102:31–40. doi:10.1016/j.aap.2017.02.023.
- Zhou, L.-P., and H.-L. Dong. 2009. Study on the reversible lane length of signalized intersection turning. Traffic Information and Safety 27: 56–62.