
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
The accuracy of state of charge estimation results will directly affect the performance of battery management system. Due to such, we focus in this article on the SOC estimation of Lithium-Ion batteries based on a fractional second-order RC model with free noninteger differentiation orders. For such an estimation, three Kalman filters are employed: the adaptive extended Kalman filter (AEKF), extended Kalman filter (EKF), and Unscented Kalman Filter (UKF). The Fractional-Order Model (FOM) parameters and differentiation orders are identified by the Particle Swarm Optimization (PSO) algorithm, and a pulsed-discharge test is implemented to verify the accuracy of parameter identification. The output voltage error of the FOM model is much less than that of the Integer-Order Model (IOM). The FOM model has lower root-mean square error (RMSE), the mean absolute error (MAE), and the maximum absolute error (MAXAE) of SOC estimation than the IOM model during the SOC estimation regardless of AEKF, EKF or UKF. Experimental results show that the FOM can simulate the polarisation on effect and charge–discharge characteristics of the battery more realistically, demonstrating that the SOC estimation based on FOM is more accurate and promising than the one based on the IOM when using the same Kalman filters.
1. Introduction
Battery Electric Vehicles (BEVs), Hybrid Electric Vehicles (HEVs), and Plug-In Hybrid Electric Vehicles (PHEVs) take advantage of renewable electricity sources and reduce reliance on fossil fuels. These environmentally friendly vehicle technologies are regarded as effective and powerful alternative solutions to replace traditional vehicles. As the energy storage component of electric vehicles, Lithium-Ion batteries have a high energy density, producing a low quantity of environmental pollution and demonstrating long lifespans (Lu et al., Citation2017). For such, a Battery Management System (BMS) is required to monitor Lithium-Ion battery cells’ states to ensuring safe and reliable battery operations, as the State-Of-Charge (SOC) (Meng et al., Citation2018a,b; Wang et al., Citation2020a, Citation2020b; Liu et al., Citation2021), State-Of-Energy (SOE) (Chang et al., Citation2020; Wang et al., Citation2021), (Xu et al., Citation2019) State-Of-Health (SOH) (Li et al., Citation2020), and State-Of-Power (SOP) (Nejad & Gladwin, Citation2020; Wei et al., Citation2019).
The SOC is of great importance among the states, defined as the percentage of the battery's remaining coulomb capacity to the nominal capacity since the SOC cannot be measured directly. Successful estimation of the SOC can protect the battery from over-discharge and overcharge. Therefore, accurate SOC estimation is of vital significance for electric vehicles. Generally speaking, the battery SOC is estimated by direct measurement of the battery current and terminal voltage.
Several estimation methods are available and categorised into three types (Ali et al., Citation2019; Dickson et al., Citation2019; Shrivastava et al., Citation2019). The former one, (Lu et al., Citation2017) conventional method: typical methods include coulomb counting (CC) method and open-circuit voltage (OCV) method. The accuracy of the SOC estimation using the CC method is highly dependent on the precision of the current sensors. The current measurement error and the SOC initial error cause a cumulative effect (Zhang et al., Citation2014a,b ) that highly deteriorates the estimation accuracy if the battery's periodic capacity calibration is not conducted. The OCV method depends on the functional relationship between SOC and OCV, as the OCV can be accurately measured only after the battery has sufficient rest to reach stability (Snihir et al., Citation2006); hence, it is not applicable when EVs are operated in driving mode. In the second type, (Meng et al., 2018) Data-driven method: the SOC estimation based on data-driven methods considers the battery a black box, describing the nonlinear relationship between the SOC and its influencing factors, such as the battery terminal voltage, current, temperature, and impedance. The black box can be established by learning algorithms (e.g. neural networks (NNs) (Cheng et al., Citation2009; Kang et al., Citation2014; Shen, Citation2007; Weiger et al., Citation2014; Xiao et al., Citation2021), support vector machines (SVMs) (Klass et al., Citation2015), and fuzzy logic (Hametner & Jakubek, Citation2013) combined with appropriate training data sets. These data-driven methods can accurately estimate the battery SOC without battery modelling; however, these methods require large experimental datasets to train the algorithm model and are difficult to use online due to their computational complexity. Lastly, the latter type, and (Chang et al., Citation2020) Model-based method: Model-based SOC estimation methods usually utilise adaptive filter algorithms in conjunction with a battery model to describe battery behaviour. In (Wang et al., Citation2019 ; Wang et al., Citation2019; Shen, Citation2018; Li et al., Citation2015; Tian et al., Citation2014; Lv et al., Citation2020; Xu et al., Citation2020; Ouyang et al., Citation2020; Liu et al., Citation2020a, Citation2020b,Citation2020c ; Tulsyan et al., Citation2016; Wang & Chen, Citation2020; Kim et al., Citation2015; Zhu et al., Citation2017; Zhao et al., Citation2017; Falahiazar et al., Citation2018), the extended Kalman filter (EKF), unscented Kalman filter (UKF) and their variants, as well as nonlinear observers are employed to estimate the battery SOC. However, the accuracy of these methods is dependent on battery modelling accuracy. Therefore, battery modelling is critical to improving the SOC estimation accuracy.
Battery models mainly include the empirical model (Hussein & Batarseh, Citation2011; Liang et al., Citation2020), electrochemical model (Dees et al., Citation2002), electrochemical impedance model (Westerhoff et al., Citation2016) and equivalent circuit model (ECM). At present, the ECM is one of the most popular models for online SOC estimation due to its high computational efficiency (Meng et al., 2018), which utilises basic electrical components (e.g. capacitors and resistors) to simulate the dynamic characteristics. At the same time, the order of the capacitance is an integer, i.e. one. Investigations have shown that the capacitance in battery models has non-integer order characteristics (Bertrand et al., Citation2010). Therefore, the integer-order of the ECM model's electrical components has difficulties accurately depicting the highly complex nonlinear and memory effects inside the battery (Bu et al., Citation2020; Jesus & Machado, Citation2009; Pang et al., Citation2017; Pang et al., Citation2019).
Fractional-Order Models (FOMs) have been widely applied in nonlinear systems, including battery modelling and SOC estimation. Integer-order models generally use the traditional least squares method for parameter identification, but it is not applicable to fractional-order models. with the development and application of optimisation algorithms such as genetic algorithm (Zhu et al., Citation2019), particle swarm optimisation algorithm (Kordestani et al., Citation2020), and artificial bee swarm (Abdullah et al., Citation2018), the use of optimisation algorithms to identify The fractional-order model of Li-ion battery became popular, and scholars improved the accuracy and robustness of parameter identification by further improving the optimisation algorithm. Wang et al.(Wang et al., Citation2020; Wang, et al., Citation2019) based on the fractional-order model, the model accuracy and robustness were greatly improved by improving the particle swarm optimisation algorithm. Wang et al. (Wang et al., Citation2015) proposed a Lithium-Ion battery FOM with free differentiation orders derived from a modified Randles model. Even though comparisons of voltage errors from the FOM and IOM show that the former has a higher performance, the conclusion has not been confirmed when estimating the battery SOC. Xiao et al. (Citation2019) employed the Fractional-Order EKF (FO-EKF) to estimate Lithium-Ion batteries’ SOC. Compared to the integer-order EKF (IO-EKF), the FO-EKF shows higher accuracy under dynamic conditions. Similar studies for SOC estimation with FO-EKF are performed (Hidalgo-Reyes et al., Citation2020; Kupper et al., Citation2018; Mawonou et al., Citation2019); however, the (state and measurement) noise covariance remains a fixed value in the process of iterative calculation, which may cause significant estimation error or even divergence. To overcome the abovementioned issues, adaptive EKF (Zhu et al., Citation2019) is applied, and besides, the Fractional-Order UKF (FO-UKF) is employed for SOC estimation (Cai et al., Citation2017; Chen et al., Citation2017). Unscented transformation, however, can be implemented only when the covariance matrix ensures a positive definite matrix, limiting FO-UKF in real applications. The development of big data processing algorithms such as artificial intelligence (Liu et al., 2020; Kheyrinataj & Nazemi, Citation2020) has provided new directions for development in various fields; to improve the accuracy of SOC estimation, we can build a more accurate battery by combining existing SOC estimation methods with data representation, big data processing and artificial intelligence algorithms (Jiang et al., Citation2021; Jiao et al., Citation2021; Kashkooli et al., Citation2019). model (Jiang et al., Citation2021; Jiao et al., Citation2021; Kashkooli et al., Citation2019). In recent years, supercapacitors are suitable for fast and frequent charging and discharging due to their high power density and long cycle life, and more and more scholars are combining them with Li-ion batteries to solve the shortcomings of Li-ion batteries. Wang et al. (Wang et al., Citation2020) developed a fractional-order model for temperature compensation of Li-ion battery and supercapacitor, and used particle swarm optimisation algorithm for parameter identification to control the average relative error of the model within 4%. Although fractional-order calculus theory has been studied more in energy storage systems such as lithium batteries, the vast majority of the current studies, which stay in the establishment of fractional-order models and the improvement of fractional-order algorithms, do not have any detailed studies on parameters such as memory length in fractional-order systems, and the effects of changes in the initial values of different parameters in SOC estimation on the Kalman filter algorithm are also less studied. On the other hand, although the accuracy of the traditional integer-order equivalent circuit model has been studied extensively, comparative studies on the accuracy and robustness of the Kalman filter algorithm in SOC estimation under integer and fractional orders are still missing.
To further clarify the advantages of the fractional model over the integer model for battery SOC estimation as well as the differences between different SOC estimation methods based on the widely adopted ECM, it is proposed in this paper a fractional second-order RC model for Lithium-Ion batteries. Fractional-order calculus and battery modelling based on fractional-order calculus are discussed in detail, and investigated the effect of memory length on the fractional order system, as also a parameter identification procedure based on the particle swarm optimisation (PSO) algorithm is proposed. For experimentation, the fractional- and integer-order models’ performance is compared with their voltage errors and SOC estimation using the filter algorithms: adaptive EKF, EKF, and UKF.
The remaining of this article follows as follows. In section II, fractional-order battery modelling and parameter identification are described, while three SOC estimation algorithms based on FOM are presented in Section III. Comparisons of the SOC results between FOM-based and IOM-based estimation algorithms are depicted in Section IV, and finally, the concluding remarks and future directions are presented in Section V.
2. Fractional-order battery modelling
2.1. Fractional-order calculus
There are currently many definitions for Fractional-Order Calculus (FOC) (Sierociuk & Dzielinski, 2006). Three commonly used FOC definitions are the Riemann-Liouville definition, the Caputo definition, and the Grünwald-Letnikov definition. Among them, the Grünwald–Letnikov definition depicts the discretization of the continuous fractional-order equations, so very suitable for numerical calculation. Besides, it is concise and easy to combine with Kalman filtering techniques. Thereupon, we use the Grünwald–Letnikov definition to establish fractional-order equations for the battery FOM. The α-order FOC for state is defined as:
(1)
(1)
(2)
(2) where
is the fractional-order differential operator,
is the sample time,
is the fractional-order, and
is the current time step. According to Equation (1), the α-order FOC of
is the weighted sum of the initial state,
, until the end state,
, which shows the discretization capability of the Grünwald–Letnikov definition.
2.2. Fractional-order model for a lithium-ion battery
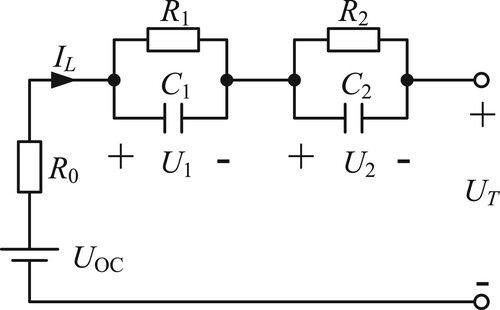
In (Hu et al., Citation2012), Hu et al. reported that adding RC networks to the first-order RC model could improve the Lithium-Ion battery model accuracy. Considering the high precision and moderate parameter numbers of the second-order RC model, the FOM based on the second-order RC model is depicted in this article, as shown in Figure .
Figure 1. Schematic diagram of the FOM of batteries.
For this FOM model, we apply the following equations to express the mathematical relationship between the load current and terminal voltage:
(3)
(3)
(4)
(4) where U1 and U2 represent the voltage of two constant phase elements (CPEs); UT and IL are respectively the terminal voltage and load current; UOC denotes the open-circuit voltage; R0 is the internal resistance; R1 and C1, R2 and C2 describing the electrochemical polarisation effect and the concentration polarisation effect respectively; and α1 and α2 are the fractional orders, 0<α1, α2≤1. When α1=α2=1, the model turns into an integer-order model.
Based on the FOC definition in Equation (1), Equation (3) can be discretized, and shown in Equation (5) as
(5)
(5) Herein, the sum of the items includes all the past states before the time
, resulting in computational burden. In real applications, under the condition of ensuring expected calculation precision, the number of summing items can be shorted to a fixed value, the memory length of the fractional order system, NFOC. That is, only the most recent NFOC states participate in the summing calculation. Even though the more significant the NFOC is, the more accurate the battery model, the large NFOC causes a heavy computational burden that affects the real-time estimation.
In (Xiao et al., Citation2019), the authors mention that it is sufficiently accurate to calculate the model voltage when setting the NFOC to 70. Therefore, we compare the terminal voltage Root-Mean Square Error (RMSE) using seven different NFOC values, namely, 10, 20, 30, 40, 50, 60, and 70. The RMSE does decrease with an increasing NFOC, though the RMSE decreases by 7.5% when decreasing the NFOC from 70 and 20. Notably, The RMSE when NFOC is 10 is much greater than that when NFOC is 20. Considering the balance between computational burden and model accuracy, we set NFOC to 20 in the present work. Thus, Equation (5) can be modified as:
(6)
(6) By applying the coulomb counting method to the battery SOC calculation, we obtain:
(7)
(7) where
is the charge–discharge efficiency and
the rated battery capacity. For simplicity purposes, the efficiency
is set to one. Consequently, we can express the proposed fractional-order battery model through the following equation:
(8)
(8) The last term in Equation (8) is what the state equation of the traditional IOM does not have, while the FOM utilises that term to enhance the modelling accuracy, since the change of current and voltage of a battery is not only related to its current state but also affected by its past state. The output equation is depicted as:
(9)
(9) where
,
,
, and
In Equation (9), the open-circuit voltage
can be replaced by the function
to
; furthermore, this function can be approximated and expressed as a linear function using a first-order Taylor expansion. Hence, the output equation can be re-organized as:
(10)
(10) and the measurement matrix,
, is
(11)
(11)
2.3. Test bench
A test bench is set up to identify the FOM parameters and verify the accuracy of SOC estimation, composed of an electronic load (ITECH, IT8512C) for battery discharging, a programmable DC supply (ITECH, IT6302) for battery charging, a thermal chamber for battery temperature control, a data acquisition card (NI, USB-6210) for load current and terminal voltage recording, a host computer for data processing, and a homemade control board for a battery charge–discharge switching mode, as shown in Figure . The thermal chamber uses thermoelectric cooler to control the battery temperature stable. The homemade control board receives the commands from the host computer through RS-232 interface to control swtich s1 /s2 on or off. The test object on the test bench is the Lithium-Ion battery manufactured by Panasonic (NCR18650BD).
Figure 2. Diagram of the adopted test bench.
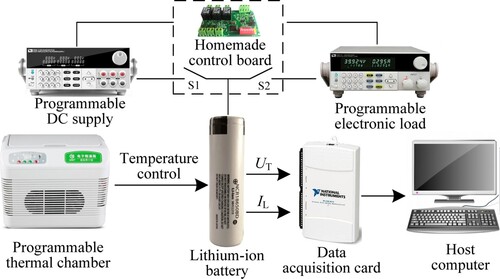
The rated capacity and rated voltage of the battery are 3.2 Ah and 3.7 V, respectively. In the experimentation process, the battery is operated in a programmable thermal chamber at 20 °C, so the influence of temperature on parameter identification and SOC estimation can be ignored.
2.4. Parameter identification
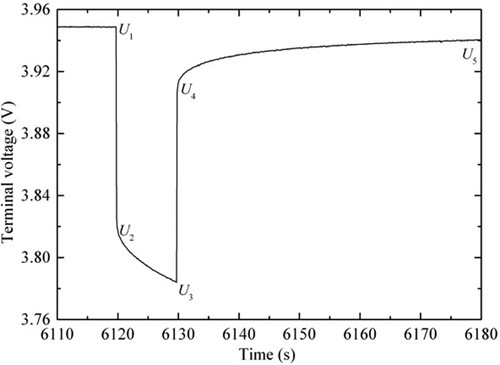
2.4.1. Identification of R0
A 1C current pulsed-discharge test is implemented to identify . Figure shows the measured terminal voltage during the discharge test when the battery SOC is 0.8. There is a sudden drop (
) or rise (
) in the terminal voltage at the start or end time of the pulse discharge that is caused by the voltage across the resistor
, since the voltage across the capacitors
and
cannot be abruptly changed. Hence,
can be expressed as:
(12)
(12)
Figure 3. Battery terminal voltage profile with a pulsed discharge. The battery SOC maintains about 0.8 from time 6110–6180 s. The battery is discharged for 10 s (from 6120 to 6130 s).
2.4.2. Identification of R1, R2, C1, C2, α1 and α2
For the IOM model, the parameters R1, R2, C1, and C2 can be obtained by using the least-squares method to fit the battery voltage profile during the charge–discharge or relaxation stage to the exponential function (Ling et al., Citation2020). However, this method is incapable of the FOM model, since the battery terminal voltage equation does not obey the exponential function. Intelligent algorithms, for example, genetic algorithms and swarm optimisation algorithms, have widely been demonstrated to be capable of dealing with nonlinear problems, including parameter identification (Brand et al., Citation2014; Yu et al., Citation2017; Zhang et al., 2014; Du et al., Citation2019; Liang et al., Citation2020). Aimed at such, Particle Swarm Optimization (PSO) is applied in this article to identify R1, R2, C1, C2, α1 and α2.
PSO is a search algorithm where each particle keeps the record of the particular best position (pbest), in which the swarm or global best position (gbest) can be located by gathering the information of pbest for each particle. The position corresponds to the solution to the problem. Finally, the optimal solution is searched through an iterative update of the particle's velocity and position. The update equations are as follows:
(13)
(13)
(14)
(14) where
and
are the velocity and position of particle
,
the inertia weight,
and
the acceleration or learning factors,
and
are the random numbers between zero and one,
the current time step, and
the dimension of the particle. The value of
ranges from 1 to 6, which denotes R1, R2, C1, C2, α1, and α2, respectively.
To improve the performance of searching the optimal global solution, the inertial weight in Equation (13) decreases with every iteration. In this work,
is expressed as:
(15)
(15) where
and
are respectively the minimum and maximum of the inertial weight, and
the number of iterations.
Notably, the RMSE between the model output voltage and the measured voltage is used to evaluate the model's accuracy. Therefore, the error between the measured terminal voltage and the terminal voltage of the FOM model
is used to evaluate the quality of the particle. The fitness function is defined as:
(16)
(16) where
is the number of terminal voltage data.
The proposed PSO-based method for parameter identification is shown in Table , and the resulting parameters are shown in Table under the condition of the SOC ranging from 0.1–1. It should be noted that the parameter identification is offline, though acceptable to use the parameters obtained by offline identification for an online estimate of the battery SOC, as the parameters will not change much. The optimality that the parameter identification and SOC estimation are carried out online using multiple estimators, for example.
Table 1. PSO-based parameter identification procedure.
Table 2. FOM model parameter identification results.
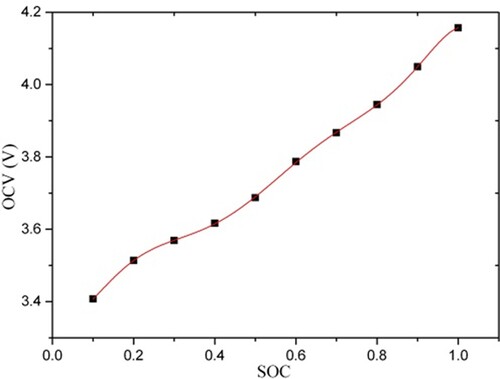
2.4.3. Relationship between OCV and SOC
Fully charge the battery and record the OCV after resting for 2 h. Then discharge the battery with 0.5 C current for 12 min, and after resting for 2 h again record the OCV. Each time the battery is discharged in this way, the SOC of the battery will be reduced by 0.1%. Repeat the discharge process until the SOC is 0.1. Figure shows the relationship between OCV and SOC.
Figure 4. The relationship between OCV and SOC.
2.5. Model verification
A battery discharge test is implemented to validate the accuracy of model parameters and differentiation orders identified by the proposed method. The battery SOC is 1 before the test, and 10% of its capacity remains after the test; that is, the battery SOC ranges from 1 to 0.1.
The comparison between the output voltage from the FOM model and the measured terminal voltage and the output voltage comparison between the FOM model and the IOM model is shown in Figure . The two models’ terminal voltage error curves depict maximum absolute errors of 53.6 and 90.2 mV for the FOM and IOM, respectively. The terminal voltage RMSE from different SOC ranges is listed in Table , where it can be seen that the RMSE varies considerably with the SOC. The parameters should be functions for the SOC if the accuracy of the models needs to be further improved, given that the battery has different characteristics under different capacities that leads to the change of model parameters. Notwithstanding the error shown in Figure and Table , the FOM model has higher precision than the IOM model. It should be noted that the battery’s performance can change significantly with factors such as battery ageing (Tang et al., Citation2021). The modelling accuracy also will change with battery ageing. The influence of battery ageing on battery modelling is ignored in this paper.
Figure 5. The terminal voltage of the FOM, the IOM, and measured value. The black solid, red solid and blue dash show the measured voltage, output voltages from the FOM model and IOM model, respectively.
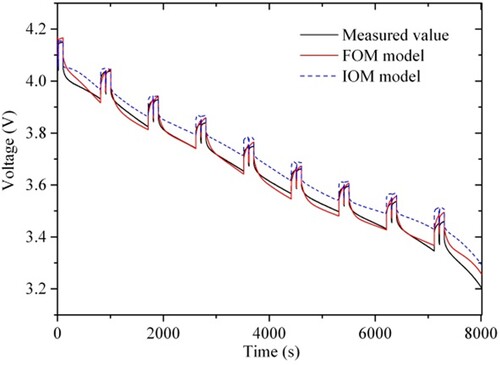
Figure 6. The terminal voltage error of the FOM and IOM. The black and red solid lines are the voltage prediction error of the FOM model and IOM model, respectively.
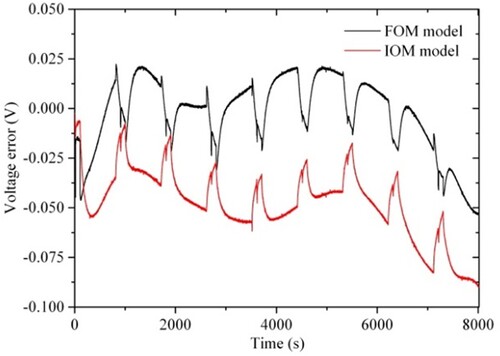
Table 3. Terminal voltage RMSEs for different SOC ranges (unit: mV).
3. SOC estimation methods
3.1. Fractional-order EKF
According to Section II, the FO-EKF is expressed by the following equations.
Fractional-order state equation:
(17)
(17) Output equation:
(18)
(18) Time domain update of the state:
(19)
(19) Time domain update of the estimate error variance:
(20)
(20) Kalman gain matrix calculation:
(21)
(21) Measurement update of the state:
(22)
(22) Measurement update of the estimate error variance:
(23)
(23) where
and
respectively denote the noise of the state and the measurement,
and
are respectively the independent white noise with zero mean,
and
are respectively the variance of
and
, and
is the unit matrix. Prior to the start of the iteration,
and
need to be set to appropriate constants.
3.2. Fractional-order AEKF
The noise's variances are fixed in the FO-EKF, while adaptively changed according to the state's noise and that of the measurement in the FO-AEKF, which can improve the accuracy of SOC estimation.
Compared with FO-EKF, FO-AEKF two steps are added, namely, the updates of and
, while other calculation steps are remained to be the same. The updates of
and
can be formulated by equations (Zhu et al., Citation2019) that follow next.
The update of :
(24)
(24) The update of
:
(25)
(25) where
and
=
.
3.3. Fractional-order UKF
FO-UKF utilises an unscented transformation to approximate nonlinear functions’ probability distribution through the usage of sigma points (Sun et al., Citation2011). The calculation process of FO-UKF includes the following steps:
Sigma points with the number of 2 +1 generation:
(26)
(26) where
is the scaling parameter and
is the dimension of the state.
Time-domain update of the state:
(27)
(27) Time-domain update of the estimate error variance:
(28)
(28)
(29)
(29)
(30)
(30)
Measurement estimation update:
(31)
(31) Measurement update of the state:
(32)
(32) Measurement update of the estimate error variance:
(33)
(33) In Equation (27)–(29),
and
are respectively the mean and covariance of the weights of the sigma points, expressed as:
(34)
(34) where
is the parameter determining the distribution of sigma points and
incorporates prior knowledge.
The convergence of the fractional-order UKF is mathematically analysed (Ramezani & Safarinejadian, Citation2018), deriving that the stability and convergence speed can be enhanced with the appropriate selection of noise covariance matrices.
4. Results and discussion
4.1. Dynamic discharge current and voltage
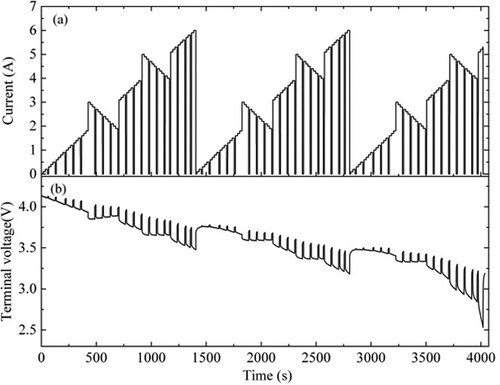
To compare the dynamic characteristics of the FOM model with the IOM model, verifying also the SOC estimation methods, a dynamic pulsed-discharge experiment is implemented, with the magnitude of the pulsed-discharge current ranges from 0.03C to 2C with an interval of 0.03C. Figure (a) shows the current profile of 233 discharge stages and 46 relaxation stages, and the current and responsive terminal voltage are shown in Figure (b). From these figures, it is observed that the battery is discharged from a full charge down to a SOC=0.065.
Figure 7. Dynamic discharge current and response voltage for SOC estimation. (a) Current profile. (b) Voltage response to the discharge current.
4.2. SOC estimation with the correct initial value
The battery starts to discharge at full charge at , and the initial value of the SOC is 1. The SOC value calculated by the CC method can be regarded as the real value, if there is no error in
. Before the SOC estimation algorithm entering the iteration,
is set to be the correct value,
=1. The SOC estimation results based on the FOM and IOM model combined with the AEKF, EKF, and UKF are shown in Figure (a). It can be observed that the SOC profiles estimated by the FO-AEKF, FO-EKF, FO-UKF, IO-AEKF, IO-EKF, and IO-UKF are all close to the real SOC profile, even though there are some differences. Their estimation errors are calculated to clearly distinguish the differences among these six methods, as shown in Figure (b). Based on the same battery model, the EKF algorithm exhibits the highest SOC estimation error. Some SOC estimation error peaks appear at the time when the discharge current suddenly increases or decreases. The polarisation effect of batteries causes this result, so thus, the instant change in discharge current results in a sudden change in the battery model parameters. Nevertheless, the other two estimation algorithms perform well, particularly UKF.
Figure 8. SOC estimation comparison when the initial SOC is correct. (a) Estimated and real SOC. (b) SOC errors.
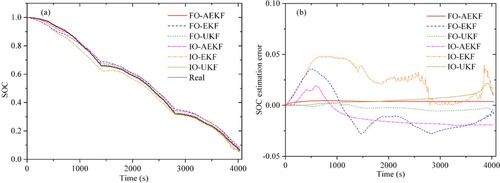
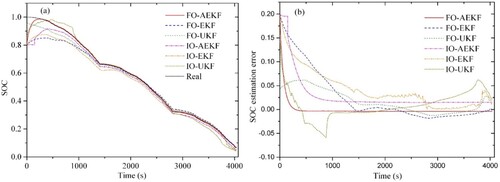
Figure 9. SOC estimation comparison when the initial SOC is incorrect. (a) Estimated and real SOC. (b) SOC errors.
As in Table , comparisons of the RMSE, the maximum absolute error (MAXAE), and the mean absolute error (MAE) of the SOC estimation using the six methods are listed. The highest MAXAE, 4.83%, shows that all these methods are accurate enough for practical applications. Besides, the FOM model has lower RMSE, MAE, and MAXAE values than the IOM model during the SOC estimation regardless of the Kalman filter algorithm used, further demonstrating that the FOM is more capable of describing the dynamic battery characteristics than the IOM.
Table 4. Comparison of the SOC estimation errors using the correct initial SOC value.
4.3. SOC estimation with the wrong initial value
To further validate the adaptation of the six methods and examine the convergence performance of the battery models and Kalman filter algorithms, is set to an arbitrary incorrect value, say
= 0.8. The SOC estimation curves are shown in Figure (a), and the estimation error curves are displayed in Figure (b). The SOC estimated by the FO-AEKF can quickly track the real value and barely equal to the real value after t>280 s. Over the complete SOC range, the RMSE and MAE using FO-AEKF to estimate SOC are respectively 1.82% and 0.67%. After t >280 s, the RMSE and MAE are respectively 0.38% and 0.37%. Using the same estimation algorithm, AEKF, the SOC estimation based on the IOM model has lower accuracy, with the RMSE and MAE increasing respectively to 4.89% and 2.91%. The estimated SOC can track the real value, though it takes much longer than FO-AEKF. The SOC RMSE and MAE of IO-AEKF are less than 5%, indicating that they are accurate enough for practical applications. Nevertheless, FO-AEKF shows higher estimation accuracy and convergence speed than IO-AEKF.
Comparing the RMSE and MAE of FO-AEKF, IO-AEKF, and four other methods to estimate SOC are shown in Table . Compared with the correct initial SOC, all methods’ performance deteriorates in the wrong initial SOC. Based on the FOM model, the RMSE and MAE of the SOC estimation increase by 3.7 and 0.8 times, 1.8 and 0.9 times, and 8.3 and 7.1 times when using AEKF, EKF, and UKF, respectively. Though, the FO-AEKF still has good performance, demonstrating the ability of FO-AEKF to quickly track unknown noise variance and describe the dynamic battery characteristics.
Table 5. Comparison of the SOC estimation errors using the incorrect initial SOC value.
4.4. Influence of sensor noise on SOC estimation
In the actual application, the noise of voltage/current sensors is unavoidable. Measurement noises in the voltage and current will affect the SOC estimation accuracy. Kalman filter algorithm is based on the state equation and measurement equation of the battery model to estimate the battery SOC. Measurement equation is just the voltage equation. The noise of current sensor has small influence on the voltage equation due to the ohmic internal resistance with the level of dozens of mΩ. On the contrary, the noise of voltage sensor will directly affect the voltage equation, which results in a larger influence on the SOC estimation compared with current noise wih the same order of magnitude. Therefore, the accuracy of the voltage sensor should be ensured as much as possible. It should be noted that Kalman filter itself has the ability of removing noise, which means small noise may not have a great impact on SOC estimation.
Limited by experimental conditions, the uncertainty of SOC estimation is not analysed by factors such as battery aging. In real application, battery aging will result in the increasement of the ohmic internal resistance, which influences the accuracy of battery model and SOC estimation. Effective uncertainty quantification solutions to benefit SOC estimation maybe include Gaussian process regression method (Liu et al., Citation2021; Liu, Hu et al., 2020) and data-driven approach (Liu et al., Citation2020a,Citation2020b, Citation2020c).
5. Conclusions and future work
In this article, a fractional second-order RC circuit model is built, and PSO is used to identify the fractional-order battery model's parameters and the fractional orders. Compared with the IOM, the FOM can accurately describe Lithium-Ion batteries’ dynamic characteristics and behaviour. Three Kalman filter algorithms, namely AEKF, EKF, and UKF, are employed to estimate the battery SOC based on the FOM and IOM, and their performances are evaluated and compared with each other through a dynamic pulsed-discharge test. The SOC estimated by FO-AEKF can track the real value faster whether the initial SOC is correct. Besides, experimental results demonstrate that the FOM-based method has higher estimation accuracy than the IOM-based method conditioned of applying the same Kalman filter algorithm.
Due to placing the battery in a programmable thermal chamber, the SOC estimation methods do not consider the influence of temperature on the present work's identified parameters. Notably, the temperature should cause a reversible change in battery capacity, such as a higher capacity in summer and a lower capacity in winter, leading to considerable estimation error. In real applications, the influence of temperature cannot be ignored, which is one of the aims of our future directions.
Acknowledgement
This work is supported by the Natural Science Foundation of the Higher Education Institute of Anhui Province under grant KJ2019A0106.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Abdullah, S., Nseef, S. K., & Turky, A. (2018). An interleaved artificial Bee colony algorithm for dynamic optimisation problems. Connection Science, 30(3), 272–284. https://doi.org/10.1080/09540091.2017.1379949
- Ali, M. U., Zafar, A., Nengroo, S. H., Hussain, S., Alvi, M. J., & Kim, H. J. (2019). Towards a smarter battery management system for electric vehicle applications: A critical review of Lithium-Ion battery state of charge estimation. Energies, 12(1), 446–478. https://doi.org/10.3390/en12030446
- Bertrand, N., Sabatier, J., Briat, O., & Vinassa, J. M. (2010). Embedded fractional nonlinear supercapacitor model and its parametric estimation method. IEEE Transactions on Industrial Electronics, 57(12), 3991–4000. https://doi.org/10.1109/TIE.2010.2076307
- Brand, J., Zhang, Z. M., & Agarwal, R. K. (2014). Extraction of battery parameters of the equivalent circuit model using a multi-objective genetic algorithm. Journal of Power Sources, 247(2), 729–737. https://doi.org/10.1016/j.jpowsour.2013.09.011
- Bu, C. Y., Li, F. J., Yin, K., Pang, J. B., Wang, L. C., & Wang, K. (2020). Research progress and prospect of triboelectric nanogenerators as self-powered human body sensors. ACS Applied Electronic Materials, 2(4), 863–878. https://doi.org/10.1021/acsaelm.0c00022
- Cai, M., Chen, W. J., & Tan, X. J. (2017). Battery state-of-charge estimation based on a dual unscented Kalman filter and fractional variable-order model. Energies, 10(10), 1577. https://doi.org/10.3390/en10101577
- Chang, J. Q., Chi, M. S., & Shen, T. (2020). Model based state-of-energy estimation for LiFePO4 batteries using unscented particle filter. Journal of Power Electronics, 20(3), 624–633. https://doi.org/10.1007/s43236-020-00051-5
- Chen, Y. X., Huang, D. Q., Zhu, Q., Liu, W. Q., Liu, C. Z., & Xiong, N. (2017). A new state of charge estimation algorithm for Lithium-Ion batteries based on the fractional unscented Kalman filter. Energies, 10(9), 1313. https://doi.org/10.3390/en10091313
- Cheng, B., Zhou, Y. L., Zhang, J. X., Wang, J. P., & Cao, B. G. (2009). Ni-MH batteries state-ofcharge prediction based on immune evolutionary network. Energy Conversion and Management, 50(12), 3078–3086. https://doi.org/10.1016/j.enconman.2009.08.010
- Dees, D. W., Battaglia, V. S., & Bélanger, A. (2002). Electrochemical modeling of lithium polymer batteries. Journal of Power Sources, 110(2), 310–320. https://doi.org/10.1016/S0378-7753(02)00193-3
- Dickson, N. T. H., Hannan, M. A., Lipu, M. S. H., & Ker, P. J. (2019). State of charge estimation for Lithium-Ion batteries using model-based and data-driven methods: A review. IEEE Access, 7(9), 136116–136136. https://doi.org/10.1109/ACCESS.2019.2942213
- Du, Z. X., Han, D. Z., & Li, K. C. (2019). Improving the performance of feature selection and data clustering with novel global search and elite-guided artificial bee colony algorithm. The Journal of Supercomputing, 75(8), 5189–5226. https://doi.org/10.1007/s11227-019-02786-w
- Falahiazar, L., & Shah-Hosseini, H. (2018). Optimisation of engineering system using a novel search algorithm: The spacing multi-objective genetic algorithm. Connection Science, 30(3), 326–342. https://doi.org/10.1080/09540091.2018.1443319
- Hametner, C., & Jakubek, S. (2013). State of charge estimation for Lithium Ion cells: Design of experiments, nonlinear identification and fuzzy observer design. Journal of Power Sources, 238(9), 413–421. https://doi.org/10.1016/j.jpowsour.2013.04.040
- Hidalgo-Reyes, J. I., Gómez-Aguilar, J. F., Alvarado-Martínez, V. M., López-López, M. G., & Escobar-Jiméneza, R. F. (2020). Battery state-of-charge estimation using fractional extended Kalman filter with mittag-leffler memory. Alexandria Engineering Journal, 59(4), 1919–1929. https://doi.org/10.1016/j.aej.2019.12.006
- Hu, X. S., Li, S. B., & Peng, H. E. (2012). A comparative study of equivalent circuit models for Li-ion batteries. Journal of Power Sources, 198(1), 359–367. https://doi.org/10.1016/j.jpowsour.2011.10.013
- Hussein, A. A. H., & Batarseh, I. (2011). An overview of generic battery models. In Proc. IEEE PES, 24–29. https://doi.org/10.1109/TSG.2013.2277411
- Jesus, I. S., & Machado, J. A. T. (2009). Development of fractional order capacitors based on electrolyte processes. Nonlinear Dynamics, 56(6), 45–55. https://doi.org/10.1007/s11071-008-9377-8
- Jiang, Y., Liang, W., Tang, J., Zhou, H., Li, K., & Gaudiot, J.-L. (2021). A novel data representation framework based on nonnegative manifold regularisation. Connection Science, 33(2), 136–152. https://doi.org/10.1080/09540091.2020.1772722
- Jiao, J., Wang, L., Li, Y., Han, D., Yao, M., Li, K., & Jiang, H. (2021). CASH: Correlation-aware scheduling to mitigate soft error impact on heterogeneous multicores. Connection Science, 33(2), 113–135. https://doi.org/10.1080/09540091.2020.1758924
- Kang, L. W., Zhao, X., & Ma, J. (2014). A new neural network model for the state-of-charge estimation in the battery degradation process. Applied Energy, 121(2), 20–27. https://doi.org/10.1016/j.apenergy.2014.01.066
- Kashkooli, A. G., Fathiannasab, H., Mao, Z. Y., & Chen, Z. W. (2019). Application of artificial intelligence to state-of-charge and state-of-health estimation of calendar-aged Lithium-Ion pouch cells. Journal of The Electrochemical Society, 166(4), A605–A615. https://doi.org/10.1149/2.0411904jes
- Kheyrinataj, F., & Nazemi, A. (2020). Fractional power series neural network for solving delay fractional optimal control problems. Connection Science, 32(1), 53–80. https://doi.org/10.1080/09540091.2019.1605498
- Kim, D., Goh, T., Park, M., & Kim, S. W. (2015).Fuzzy sliding mode observer with grey prediction for the estimation of the state-of-charge of a Lithium-Ion battery. Energies, 8(11), 12409–12428. https://doi.org/10.3390/en81112327
- Klass, V., Behm, M., & Lindbergh, G. (2015). Capturing Lithium-Ion battery dynamics with support vector machine-based battery model. Journal of Power Sources, 298(12), 92–101. https://doi.org/10.1016/j.jpowsour.2015.08.036
- Kordestani, J. K., Meybodi, M. R., & Rahmani, A. M. (2020). A note on the exclusion operator in multi-swarm PSO algorithms for dynamic environments. Connection Science, 32(3), 239–263. https://doi.org/10.1080/09540091.2019.1700912
- Kupper, M., Funk, C., Eckert, M., & Hohmann, S. (2018). Fractional extended and unscented Kalman filtering for state of charge estimation of Lithium-Ion batteries. In Proc. Annual ACC, 3855–3862. https://doi.org/10.23919/ACC.2018.8430859
- Li, D., Ouyang, J., Li, H. Q., & Wan, J. F. (2015). State of charge estimation for LiMn2O4 power battery based on strong tracking sigma point Kalman filter. Journal of Power Sources, 279(4), 439–449. https://doi.org/10.1016/j.jpowsour.2015.01.002
- Li, Y. Y., Sheng, H. M., Cheng, Y. H., Stroe, D. I., & Teodorescu, R. (2020). State-of-health estimation of Lithium-Ion batteries based on semi-supervised transfer component analysis. Applied Energy, 277(7), 115504. https://doi.org/10.1016/j.apenergy.2020.115504
- Liang, W., Li, K., Long, J., Kui, X., & Zomaya, A. Y. (2020). An industrial network intrusion detection algorithm based on multifeature data clustering optimization model. IEEE Transactions on Industrial Informatics, 16(3), 2063–2071. https://doi.org/10.1109/TII.2019.2946791
- Ling, L. Y., He, Y. L., Gong, B., & Xing, L. K. (2020). State-of-charge estimation of lithium battery using adaptive extended Kalman filter. Journal of Anhui University of Technology, 40(4), 19–25. https://doi.org/10.3969/j.issn.1672-1098.2020.04.004
- Liu, C. L., Li, Q., & Wang, K. (2021). State-of-charge estimation and remaining useful life prediction of supercapacitors. Renewable and Sustainable Energy Reviews, 150, 111408. https://doi.org/10.1016/j.rser.2021.111408
- Liu, F., Ma, J., Su, W. X., Chen, H. N., & He, M. W. (2016). Research on parameter self-learning unscented Kalman filtering algorithm and its application in battery charge of state estimation. Energies, 13(7), 1679. https://doi.org/10.3390/en13071679
- Liu, K., Hu, X., Wei, Z., Li, Y., & Jiang, Y. (2020a). Modified Gaussian process regression models for cyclic capacity prediction of lithium-ion batteries. IEEE Transactions on Transportation Electrification, 5(4), 1225–1236. https://doi.org/10.1109/TTE.2019.2944802
- Liu, K., Li, Y., Hu, X., Lucu, M., & Widanage, W. D. (2019). Gaussian process regression With automatic relevance determination kernel for Calendar aging prediction of Lithium-Ion batteries. IEEE Transactions on Industrial Informatics, 16(6), 3767–3777. https://doi.org/10.1109/TII.2019.2941747
- Liu, K., Shang, Y., Ouyang, Q., & Widanage, W. D. (2020b). A data-driven approach with uncertainty quantification for predicting future capacities and remaining useful life of lithium-ion battery. IEEE Transactions on Industrial Electronics, 68(99), 1–1. https://doi.org/10.1109/TIE.2020.2973876
- Liu, W. H., Hu, E. W., Su, B., & Wang, J. (2020c). Using machine learning techniques for DSP software performance prediction at source code level. Connection Science, 33, 1–16. https://doi.org/10.1080/09540091.2020.1762542
- Lu, J., Wu, T., & Amine, K. (2017). State-of-the-art characterization techniques for advanced Lithium-Ion batteries. Nature Energy, 2(3), 17011. https://doi.org/10.1038/nenergy.2017.11
- Lv, J. C., Jiang, B. C., Wang, X. L., Liu, Y. R., & Fu, Y. C. (2020). Estimation of the state of charge of lithium batteries based on adaptive unscented Kalman filter algorithm. Electronics, 9(9), 1425. https://doi.org/10.3390/electronics9091425
- Mawonou, K. S. R., Eddahech, A., Dumur, D., Beauvois, D., & Godoy, E. (2019). Improved state of charge estimation for Li-ion batteries using fractional order extended Kalman filter. Journal of Power Sources, 435(9), 226710. https://doi.org/10.1016/j.jpowsour.2019.226710
- Meng, J., Ricco, M., Luo, G., Swierczynski, M., Stroe, D. I., Stroe, A. I., & Teodorescu, R. (2018a). An overview and comparison of online implementable soc estimation methods for Lithium-Ion battery. IEEE Transactions on Industry Applications, 54(2), 1583–1591. https://doi.org/10.1109/TIA.2017.2775179
- Meng, J. H., Luo, G. Z., Ricco, M., & Swierczynski, M. (2018b). Overview of Lithium-Ion battery modeling methods for state-of-charge estimation in electrical vehicles. Applied Sciences, 8(5), 659–675. https://doi.org/10.3390/app8050659
- Nejad, S., & Gladwin, D. T. (2020). Online battery state of power prediction using PRBS and extended Kalman filter. IEEE Transactions on Industrial Electronics, 67(5), 3747–3755. https://doi.org/10.1109/TIE.2019.2921280
- Nikdel, M. (2018). Various battery models for various simulation studies and applications. Renewable and Sustainable Energy Reviews, 32(4), 477–485. https://doi.org/10.1016/j.rser.2014.01.048
- Ouyang, Q., Ma, R., Wu, Z. X., Xu, G. T., & Wang, Z. S. (2020). Adaptive square-root unscented Kalman filter-based state-of-charge estimation for Lithium-Ion batteries with model parameter online identification. Energies, 13(18), 4968. https://doi.org/10.3390/en13184968
- Pang, J. B., Bachmatiuk, A., Yin, Y., Trzebicka, B., Zhao, L., Fu, L., Mendes, R. G., Gemming, T., Liu, Z., & Rummeli, M. H. (2017). Applications of phosphorene and black phosphorus in Energy Conversion and storage devices. Advanced Energy Materials, 8(1), 1702093. https://doi.org/10.1002/aenm.201702093
- Pang, J. B., Mendes, R. G., Bachmatiuk, A., Zhao, L., Ta, H. Q., Gemming, T., Liu, H., Liu, Z., & Rummeli, M. H. (2019). Applications of 2D MXenes in energy conversion and storage systems check for updates. Chemical Society Reviews, 2019(48), 72–133. https://doi.org/10.1039/C8CS00324F
- Ramezani, A., & Safarinejadian, B. (2018). A modified fractional-order unscented Kalman filter for nonlinear fractional-order systems. Circuits, Systems, and Signal Processing, 37(12), 3756–3784. https://doi.org/10.1007/s00034-017-0729-9
- Shen, W. X. (2007). State of available capacity estimation of lead-acid batteries inelectric vehicles using neural network. Energy Conversion and Management, 48(2), 433–442. https://doi.org/10.1016/j.enconman.2006.06.023
- Shen, Y. Q. (2018). Adaptive extended Kalman filter based state of charge determination for Lithium-Ion batteries. Electrochimica Acta, 283(9), 1432–1440. https://doi.org/10.1016/j.electacta.2018.07.078
- Shrivastava, P., Soon, T. K., Idris, M. Y. I. B., & Mekhilef, S. (2019). Overview of model-based online state-of-charge estimation using kalmanfilter family for Lithium-Ion batteries. Renewable and Sustainable Energy Reviews, 113(10), 109233. https://doi.org/10.1016/j.rser.2019.06.040
- Sierociuk, D., & Dzielinski, A. (2006). Fractional Kalman filter algorithm for the states, parameters and order of fractional system estimation. Int. J. Appl. Math. Comput. Sci, 16(1), 129–140. https://www.researchgate.net/publication/228633560_Fractional_Kalman_filter_algorithm_for_the_states_parameters_and_order_of_fractional_system_estimation
- Snihir, I., Rey, W., Verbitskiy, E., Belfadhel-Ayeb, A., & Notten, P. H. L. (2006). Battery open-circuit voltage estimation by a method of statistical analysis. Journal of Power Sources, 159(2), 1484–1487. https://doi.org/10.1016/j.jpowsour.2005.11.090
- Sun, F. C., Hu, X. S., Zou, Y., & Li, S. G. (2011). Adaptive unscented Kalman filtering for state of charge estimation of a Lithium-Ion battery for electric vehicles. Energy, 36(5), 3531–3540. https://doi.org/10.1016/j.energy.2011.03.059
- Tang, X. P., Liu, K. L., Li, K., Widanage, W. D., Kendrick, E., & Furong Gao, F. R. (2021). Recovering large-scale battery aging dataset with machine learning. Patterns, 2021, 100302. https://doi.org/10.1016/j.patter.2021.100302
- Tian, Y., Xia, B. Z., Sun, W., Xu, Z. H., & Zheng, W. W. (2014). A modified model based state of charge estimation of power Lithium-Ion batteries using unscented Kalman filter. Journal of Power Sources, 270(12), 619–626. https://doi.org/10.1016/j.jpowsour.2014.07.143
- Tulsyan, A., Tsai, Y., Gopaluni, R. B., & Braatz, R. D. (2016). State-of-charge estimation in Lithium-Ion batteries: A particle filter approach. Journal of Power Sources, 331(11), 208–223. https://doi.org/10.1016/j.jpowsour.2016.08.113
- Wang, B. J., Li, S. E., Peng, H., & Liu, Z. Y. (2015). Fractional-order modeling and parameter identification for Lithium-Ion battery. Journal of Power Sources, 293(10), 151–161. https://doi.org/10.1016/j.jpowsour.2015.05.059
- Wang, K., Liu, C. L., Sun, J. R., Zhao, K., & Wang, L. C. (2021). An improved SOC control strategy for Electric Vehicle Hybrid Energy Storage systems. Energies, 13(20), 1–15. https://doi.org/10.1155/2021/8816250
- Wang, K., Wang, W., Wang, L., & Li, L. (2020). An improved SOC control strategy for Electric Vehicle Hybrid Energy Storage systems. Energies, 2020(13), 5297. https://doi.org/10.3390/en13205297
- Wang, L. M., Lu, D., Liu, Q., Liu, L., & Zhao, X. L. (2019). State of charge estimation for LiFePO4 battery via dual extended &Kalman filter and charging voltage curve. Electrochimica Acta, 296(2), 1009–1017. https://doi.org/10.1016/j.electacta.2018.11.156
- Wang, Q., Feng, X. Y., Zhang, B., Gao, T., & Yang, Y. (2019). Power battery state of charge estimation based on extended Kalman filter. Journal of Renewable and Sustainable Energy, 11(1), 014302. https://doi.org/10.1063/1.5057894
- Wang, Q., Wang, Z., Zhang, L., Liu, P., & Zhang, Z. (2020a). A novel consistency evaluation method for series-connected battery systems based on real-world operation data. IEEE Transactions on Transportation Electrification, 7(99), 1–1. https://doi.org/10.1109/TTE.2020.3018143
- Wang, Y. J., & Chen, Z. H. (2020). A framework for state-of-charge and remaining discharge time prediction using unscented particle filter. Applied Energy, 260(7), 114324. https://doi.org/10.1016/j.apenergy.2019.114324
- Wang, Y. J., Li, M. C., & Chen, Z. H. (2020b). Experimental study of fractional-order models for lithium-ion battery and ultra-capacitor: Modeling, system identification, and validation. Applied Energy, 278, 115736. https://doi.org/10.1016/j.apenergy.2020.115736
- Wei, Z. B., Zhao, J. Y., Xiong, R., Dong, G. Z., Pou, J., & Tseng, K. J. (2019). Online estimation of power capacity with noise effect attenuation for Lithium-Ion battery. IEEE Transactions on Industrial Electronics, 66(7), 5724–5735. https://doi.org/10.1109/TIE.2018.2878122
- Weiger, T., Tian, Q., & Lian, K. (2014). State-of-charge prediction of batteries and battery–supercapacitor hybrids using artificial neural networks. Journal of Power Sources, 248(2), 1028–1033. https://doi.org/10.1016/j.jpowsour.2010.10.075
- Westerhoff, U., Kurbach, K., Lienesch, F., & Kurrat, M. (2016). Analysis of Lithium-Ion battery models based on electrochemical impedance spectroscopy. Energy Technology, 4(7), 1620–1630. https://doi.org/10.1002/ente.201600154
- Xiao, F., Li, C. R., Fan, Y. X., Yang, G. R., & Tang, X. (2021). State of charge estimation for Lithium-Ion battery based on Gaussian process regression with deep recurrent kernel. International Journal of Electrical Power & Energy Systems, 124(1), 106369. https://doi.org/10.1016/j.ijepes.2020.106369
- Xiao, R. X., Shen, J. W., Li, X. Y., Yan, W. S., Pan, E. D., & Chen, Z. (2019). Comparisons of modeling and state of charge estimation for Lithium-Ion battery based on fractional order and integral order methods. Energies, 9(3), 184. https://doi.org/10.3390/en9030184
- Xu, W., Xu, J. L., Lang, J. F., & Yan, X. F. (2019). A multi-timescale estimator for Lithium-Ion battery state of charge and state of energy estimation using dual H infinity filter. IEEE Access, 7(12), 181229–181241. https://doi.org/10.1109/ACCESS.2019.2959396
- Xu, W. H., Wang, S. L., Fernandez, C., Yu, C. M., Fan, Y. C., & Cao, W. (2020). Novel reduced-order modeling method combined with three-particle nonlinear transform unscented Kalman filtering for the battery state-of-charge estimation. Journal of Power Electronics, 20(6), 1541–1549. https://doi.org/10.1007/s43236-020-00146-z
- Yu, Z. H., Xiao, L. J., Li, H. Y., Zhu, X. L., & Huai, R. T. (2017). Model parameter identification for lithium batteries using the coevolutionary particle swarm optimization method. IEEE Transactions on Industrial Electronics, 67(7), 5690–5700. https://doi.org/10.1109/TIE.2017.2677319
- Zhang, L., Fan, W., Wang, Z., Li, W., & Sauer, D. U. (2020). Battery heating for lithium-ion batteries based on multi-stage alternative currents. Journal of Energy Storage, 32, 101885. https://doi.org/10.1016/j.est.2020.101885
- Zhang, L., Hu, X., Wang, Z., Ruan, J., & Pecht, M. G. (2020). Hybrid electrochemical energy storage systems: An overview for smart grid and electrified vehicle applications. Renewable and Sustainable Energy Reviews, 139, 110581. https://doi.org/10.1016/j.rser.2020.110581
- Zhang, L. Q., Wang, L. X., Hinds, G., Lyu, C., Zheng, J., & Li, J. F. (2014a). Multi-objective optimization of Lithium-Ion battery model using genetic algorithm approach. Journal of Power Sources, 270(12), 367–378. https://doi.org/10.1016/j.jpowsour.2014.07.110
- Zhang, Y. H., Song, W. J., Lin, S. L., & Feng, Z. P. (2014b). A novel model of the initial state of charge estimation for LiFePO4 batteries. Journal of Power Sources, 248(2), 1028–1033. https://doi.org/10.1016/j.jpowsour.2013.09.135
- Zhao, L. H., Ji, G. H., & Liu, Z. H. (2017). Design and experiment of nonlinear observer with adaptive gains for battery state of charge estimation. Energies, 10(12), 2046. https://doi.org/10.3390/en10122046
- Zheng, Z. H., Zhou, Y. Z., Sun, Y. L., Wang, Z., & Liu, B. Y. (2021). Applications of federated learning in smart cities: Recent advances, taxonomy, and open challenges. Connection Science, 1–28. https://doi.org/10.1080/09540091.2021.1936455
- Zhu, Q., Li, L., Hu, X. S., Xiong, N., & Hu, G. D. (2017). H-infinity-based nonlinear observer design for state of charge estimation of Lithium-Ion battery with polynomial parameters. IEEE Transactions on Vehicular Technology, 66(12), 10853–10865. https://doi.org/10.1109/TVT.2017.2723522
- Zhu, Q., Xu, M. G., Liu, W. Q., & Zheng, M. Q. (2019). A state of charge estimation method for Lithium-Ion batteries based on fractional order adaptive extended Kalman filter. Energy, 187(11), 115880. https://doi.org/10.1016/j.energy.2019.115880