
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
For an integer an independent k-rainbow dominating function (IkRDF for short) on a graph G is a function g that assigns to each vertex a set of colors chosen from the subsets of
satisfying the following conditions: (i) if
, then
, and (ii) the set
is an independent set. The weight of an IkRDF g is the value
. The independent k-rainbow domination number
is the minimum weight of an IkRDF on G. In this paper, we initiate a study of the independent k-rainbow bondage number
of a graph G having at least one component of order at least three, defined as the smallest size of set of edges
for which
. We begin by showing that the decision problem associated with the independent k-rainbow bondage problem is NP-hard for general graphs for
. Then various upper bounds on
are established as well as exact values on it for some special graphs. In particular, for trees T of order at least three, it is shown that
.
MSC 2010:
1 Introduction
We consider simple graphs G with vertex set and edge set
. The order of G is
. For a vertex v in V, let
denote the set of neighbors of v and let
The degree of a vertex v is
. The maximum degree and minimum degree of G are denoted by
and
, respectively. When no confusion arises, we simply write N, d, δ and
instead of
and
respectively. A leaf is a vertex of degree one while its neighbor is called a support vertex. If v is a support vertex, then we denote by L(v) the set of leaves adjacent to v. For definitions and notations not given here we refer the reader to [Citation11].
As usual, the path (cycle, complete graph, complete bipartite graph, respectively) of order n is denoted by Pn (Cn, Kn, , respectively). A tree is a connected acyclic graph. A star of order n, with
is the graph
For integers
a double star
is a tree with exactly two vertices that are not leaves, one of which has p leaf neighbors, and the other has q leaf neighbors.
A set is a dominating set if every vertex not in S has at least one neighbor in S. The domination number of a graph G is the minimum cardinality of a dominating set of G. In 1990, Fink et al. [Citation8] introduced the bondage number b(G) to measure the vulnerability or the stability of the domination number in an interconnection network G under edge failure. They defined the bondage number of a graph G as the minimum number of edges whose removal from G increases the domination number. Since then the concept of bondage has been studied for several graph parameters, for instance see [Citation7, Citation14–20, Citation25].
An independent set of a graph G is a set of vertices, no two of which are adjacent. Given a positive integer k and a graph G, we consider the assignment of a subset of the color set to every vertex of G such that every vertex assigned an empty set has all k colors in its neighborhood. Such an assignment is called a k-rainbow dominating function (kRDF) of the graph G. The weight of a kRDF g of a graph G is the value
. If H is a vertex induced subgraph of G, the weight restricted to H is
. The minimum weight of a kRDFs in G is called the k -rainbow domination number of G, denoted by
The concept of rainbow domination was introduced by Brešar, Henning and Rall in [Citation5]. An independent k-rainbow dominating function (IkRDF) is a kRDF such that the set of vertices assigned non-empty sets is independent. The independent k-rainbow domination number
is the minimum weight of an IkRDFs in G. An IkRDF of G with weight
is called an
-function. It worth mentioning that when
matches with the usual independent domination number
The k-rainbow domination and its variant has been studied extensively [Citation1–3, Citation9, Citation13, Citation21, Citation23–26]. For more details on rainbow domination we refer the reader to the chapter book [Citation4].
In this paper, we initiate the study of the independent k-rainbow bondage number of a graph G defined as the smallest set of edges
for which
. Since the independent k-rainbow domination number of a connected graph of order two does not increase after deleting the unique edge, we will therefore assume that
In addition, a subset
is a
-set if
and
. It is worth noting that the independent 1-rainbow bondage number
is the independent bondage number
introduced in 2018 by Priddy, Wang and Wei [Citation25] and also recently studied by Pham and Wei [Citation24] for planar graphs with minimum degree at least three. In addition, Jafari Rad and Kamarulhaili [Citation12] have shown that determining the independent 1-rainbow bondage number is NP-hard even for bipartite graphs. We also note that the concept of k-rainbow bondage was first studied by Dehgardi et al. in 2014 for the k-rainbow domination number of a graph G (see [Citation7]), where the corresponding parameter has been denoted by
and the NP-hardness of which has been shown in [Citation12].
Among the results established in this paper, we start by showing that the decision problem associated with the independent k-rainbow bondage number is NP-hard for general graphs for any integer . Then we focus on the special case
where several upper bounds are given. In particular for trees T of order at least three it is shown that
. Furthermore, exact values of the independent 2-rainbow bondage number are also given for some special graphs including paths, cycles and complete multipartite graphs.
Trivially, for every connected graph G of order The characterization of connected graphs G of order n with
which will be useful in the sequel, is given by the following result.
Proposition 1
([Citation6]). Let G be a connected graph of order . Then
if and only if
2 NP-hardness result
In this section, we will show that the decision problem corresponding to the problem of computing the independent k-rainbow bondage domination number for general graphs is NP-hard. Recall that the NP-hardness has been already shown in [Citation12] for bipartite graphs when In the sequel, k is an integer greater or equal to 2. Let us state the following decision problem.
Independent k-rainbow bondage domination number(Ik RB):
Instance: A graph G and a positive integer q.
Question: Is ?
We show that the NP-hardness of the IkRB problem by transforming the 3-SAT problem to it in polynomial time. Recall that the 3-SAT problem specified below was proven to be NP-complete in [Citation10].
3-satisfiability problem (3-SAT):
Instance: A collection of clauses over a finite set U of variables such that
for
.
Question: Is there a truth assignment for U that satisfies all the clauses in ?
Theorem 2.
The IkRB problem is NP-hard for general graphs for
Proof.
Let and
be an arbitrary instance of 3-SAT. We will construct a graph G and choose a positive integer q such that
is satisfiable if and only if
. We construct such a graph G as follows. For each
, we associate to each variable
a graph Hi obtained from a complete bipartite graph
such that
with bipartite sets
and
by adding the edge
. Also for each
, we associate to each clause
a single vertex cj by adding the edge-set
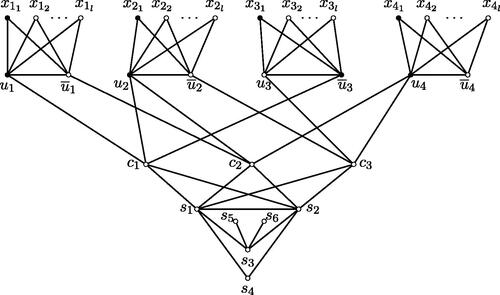
. Finally, we add a graph F, as depicted in , by joining s1 and s2 to every vertex
Clearly, G is of order
, and thus the construction can be accomplished in polynomial time. Set
provides an example of the constructed graph when
and
, where
. All that remains to be shown is that
is satisfiable if and only if
. This aim can be fulfilled by proving the following claims. □
Fig. 1 Graph F.
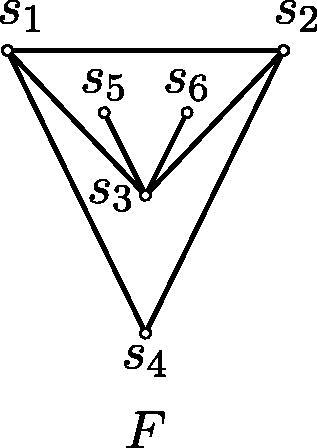
Fig. 2 NP-hardness for general graphs.
Claim 1. , and for any
-function f, we have
. Moreover, if
, then
and
or
for each
while
for each
.
Proof
of Claim 1. Let f be a -function. By the construction of G, we have
for each
Moreover, one can easily see that
and therefore
.
Suppose now that . Then
for each
. Moreover, since ui is adjacent to
and
we must have either
and
or
and
Now, if
(the case
is similar), then
for each
and so need for the other vertices in F that
and
. But then
, a contradiction. Hence
and so
and
. The only possibility is
, and therefore
. □
Claim 2. if and only if
is satisfiable.
Proof
of Claim 2. Suppose that and let f be an
-function of G. By Claim 1,
and
for each
. Also, for each
, either
and
or
and
Define a mapping
by
(1)
(1)
We now show that t is a satisfying truth assignment for . It is sufficient to show that every clause in
is satisfied by t. Since
and the vertex cj is not adjacent to any member of
, there exists some
such that cj is adjacent to ui or
so that it has all k colors in its neighborhood. If cj is adjacent to ui and
, then
. If cj is adjacent to
and
then
and so
by (1). Hence, in either case, the clause Cj is satisfied. The arbitrariness of j with
shows that all the clauses in
are satisfied by t, that is,
is satisfiable.
Conversely, suppose that is satisfiable, and let
be a satisfying truth assignment for
. We construct a subset D of vertices of G as follows. If
, then put the vertex ui in D; if
, then put the vertex
in D. Hence
. Define the function h by
for every
and
for the remaining vertices. Since t is a satisfying truth assignment for
, the corresponding vertex cj in G is adjacent to at least one vertex in D. Moreover, one can easy check that h is an IkRDF of G of weight
and so
. The equality follows from Claim 1. □
Claim 3. For any edge .
Proof
of Claim 3. Assume first that Without loss of generality, let
(the case
is similar) for some
and
. Then the function f defined on G – e by
for all
and
for the remaining vertices, is an IkRDF of G – e of weight
. One can easily check that the function f previously defined remains an IkRDF of G – e of weight
even if the removed edge e belongs to
or
for some j or e has an endvertex in some
and the other endvertex is
for some j. Now assume that
for some
Then the function f defined on G – e by
for each
and
for the remaining vertices, is an IkRDF of G – e of weight
. If
, then the function f defined by
for all
and
and
for any other vertex y is an IkRDF of G – e of weight
. Finally, if e is an edge incident with vertex s2 and different from
, then the function f defined by
for all
and
for any other vertex y is an IkRDF of G – e of weight
. Whatever the edge e that is deleted, we deduce that
□
Claim 4. if and only if
.
Proof
of Claim 4. Assume that and take
. Suppose that
and let f be an
-function. Since s6 is a isolated,
. Moreover, since
for every i, we deduce that
Clearly, it is impossible to assign subsets of
over such vertices so that the sum of their sizes is at most k. Consequently
, and thus
.
Now assume that and let e be an edge such that
. By Claim 1,
and by Claim 3,
. Therefore
, which yields
.
It follows from Claims 2 and 4, that if and only if
is satisfiable and the desired result follows. □
3 Exact values of
In this section, we are restricting to the particular case where we determine the independent 2-rainbow bondage number for some special graphs. The proofs of items 1 and 4 of the following proposition are straightforward.
Proposition 3.
For
[Citation22]
[Citation22] For
If
Proposition 4.
For
Proof.
Let F be a -set. Then
. If the edge-induced subgraph
has a components
, then the function f defined on
by
,
and
for
, is an I2RDF of
which leads to a contradiction. Thus each component of the edge-induced subgraph
has at least 3 vertices. Let
be the component of
. Then
and we deduce that
This implies that .
It is shown in [Citation7] that . Hence if F is a
-set, then we have
and thus
. Therefore
. □
Proposition 5.
For
Proof.
Let . Clearly
and Proposition 3-(2) implies that
. Therefore
□
Proposition 6.
For ,
Proof.
The result is immediate for n = 3, and so we assume that . If
, then by Proposition 3-(2,3) it follows that for any edge
,
leading to
. In the following, we assume that
and let
. Again, by Proposition 3-(2,3) we see that for any edge
,
and so
. Now, if
, then
and Proposition 3-(2,3) yields
and so
. Hence we assume that n is odd with
. Since
, we deduce from Proposition 3-(2,3) that
and so
. To achieve the proof it is enough to show that
when
. Hence assume that
, and let e and
be two arbitrary edges of Cn. Clearly,
is the union of two disjoint paths P and Q such that
. Therefore
. Without loss of generality, we may assume that n(P) is even and thus n(Q) is odd. It follows from Proposition 3-(2) that
which leads to
, and therefore
when
and
. □
For an I2RDF f on a graph G, let ,
and
Since these four sets determine f, we can equivalently write
(or
to refer to f).
Proposition 7.
Let be the complete t-partite graph with
such that
. Then
.
Proof.
Let be the partite sets of G with
for
. In addition, assume that
and
. We note that the function hi defined on V(G) by
for each
and
for any
is an
-function for every
. Let
, and let
. Recall that by Proposition 3-4,
We claim that
. To show this, let
be an
-function. We consider three possible situations.
If , then either
or
for some vertex
. If
, then the condition that
is independent implies that
and so
. This yields to
Now assume that
for some vertex
. If, without loss of generality,
, then it follows that
for every vertex
and thus
If (the case
is similar), then
is assigned an empty set as well as any other vertex belonging to Xi with
But then we need for
that
and because of the condition
is independent, we deduce that
Therefore
Finally, assume that . Then as before
is assigned an empty set as well as any other vertex belonging to Xi with
Since
is independent, we must also have either
or
. In either case we obtain
Consequently,
.
To prove the inverse inequality, let be an arbitrary subset of edges with
, and let H be the graph obtained from G by removing all edges of F. Then there are two distinct vertices ui and uj such that
In this case, define the function g on V(H) by
,
for
and
otherwise. Then g is an I2RDF of H of weight n1, implying that
. Therefore
, and the proof is complete. □
4 Bounds on
In this section, we first present an upper on the independent 2-rainbow bondage number for general graphs and then we will show that this bound is reduced to 2 for trees of order at least three.
Theorem 8.
Let G be a connected graph. If is a path of length 2 in G and G has no
-function assigning the set {1, 2} to some neighbor of xi for each
, then
where
if
and
otherwise.
Proof.
Let B ⊆ E(G) be the set of all edges incident with either x1, x2 or x3 except the edge . Obviously,
when
and
when
. Let H be the graph obtained from G by removing all edges of B. We claim that
leading to
. Let
be an
-function. Since x1 is isolated in H and x2, x3 induce a path on two vertices in H, we have
and
or
. Without loss of generality, assume that
and
. If
or
, then the function h defined on V(G) by
and
for any other vertex z, is an I2RDF of G of weight less than
. Hence we assume
and
. We consider the following cases.
Case 1. .
If and
, then the function h defined by
and
for any other vertex z, is an I2RDF of G of weight less than
. If
and
, then the function h defined by
for some vertex
and
for any other vertex z, is an I2RDF of G of weight less than
. If
and
, then the function h defined by
and
for any other vertex z, is an I2RDF of G of weight less than
. Based on the above, we can assume now that
. Likewise we may assume that
.
If and
, then the function h defined by
,
for some vertex
for some vertex
and
otherwise, is an I2RDF of G of weight less than
. If
and
, then the function h defined by
,
for some vertex
and
otherwise, is an I2RDF of G of weight less than
. Thus we assume that
.
If , then the function h defined by
{1, 2} for some vertex
and
otherwise, is an I2RDF of G of weight less than
. If
, then the function h defined by
and
otherwise, is an I2RDF of G of weight less than
.
Finally, if and
, then the function h defined by
and
for the remaining vertices, is an I2RDF of G of weight less than
. In any situation previously considered we have shown that
.
Case 2. (the case
is similar).
Let . If
and
, then the function h defined by
and
for any other vertex z, is an I2RDF of G of weight less than
. If
and
, then the function h defined by
for some vertex
and
for any other vertex z, is an I2RDF of G of weight less than
. If
and
, then the function h defined by
and
for any other vertex z, is an I2RDF of G of weight less than
. Based on the above, we can assume now that
. If
and
, then the function h defined by
for some vertex
and
otherwise, is an I2RDF of G of weight less than
. If
and
, then the function h defined by
for some vertex
for some vertex
and
otherwise, is an I2RDF of G of weight
which assigns the set {1, 2} to some neighbor of xi for each
, leading by assumption to
. If
and
, then the function h defined by
for some vertex
and
otherwise, is an I2RDF of G of weight less than
. Hence, we assume that
.
If , then the function h defined by
, and
otherwise, is an I2RDF of G of weight less than
. If
, then the function h defined by
,
for some vertex
and
otherwise, is an I2RDF of G of weight less than
. If
, then the function h defined by
and
otherwise, is an I2RDF of G of weight less than
. Finally, if
, then the function h defined by
,
and
otherwise, is an I2RDF of G of weight less than
. In any case considered above we have shown that
which completes the proof. □
Theorem 8 and its proof result the following corollary.
Corollary 9.
Let G be a connected graph. If is a path of length 2 in G with
, then
Proof.
Let f be an -function. If
, then we must have
for each
, that is f does not assign the set {1, 2} to no neighbor of x2. On the other hand, if
, then f does not assign the set {1, 2} to no neighbor of x1. Hence G satisfies the condition specified in the statement of Theorem 8, and consequently,
. Thus our corollary is proved. □
A similar argument to that used in the proof of Corollary 9 leads to another consequence of Theorem 8.
Corollary 10.
Let G be a connected graph. If is a path of length 2 in G with
, then
Dehgardi et al. [Citation7] showed that for any tree T of order at least 3, . The next result shows that this upper bound remains valid for the independent 2-rainbow bondage number. However, unlike the proof given in [Citation7] for
the proof for
is quite long where several cases are discussed. Before presenting the result, we give some additional definitions and notations. A path joining two vertices x and y is called a (x, y)-path. The
of a connected graph G, denoted diam(G), is the length of the shortest path between the most distanced vertices. A diametral path of a graph G is a shortest path whose length is equal to diam
We are also considering rooted trees distinguished by one vertex r called the root. For a vertex
in a rooted tree T, the parent of v is the neighbor of v on the unique (r, v)-path, while a child of v is any other neighbor of v. A descendant of v is a vertex
such that the unique(r, w)-path contains v. The set of children of a vertex v is denoted by C(v) while D(v) denotes the set of its descendants. The maximal subtree at v denoted by Tv is the subtree of T induced by v and all its descendants. The depth of v is the largest distance from v to a descendant of v.
Theorem 11.
If T is a tree of order , then
Furthermore, this bound is sharp for double star
for
.
Proof.
Obviously diam , since
If diam
, then T is a star and for any edge e of T we have
yielding
. Hence assume that diam
and let
be a diametral path in T chosen such that: (i)
is as large as possible, and (ii) subject to (i)
is maximized. If
, then T is a double star
for some integers
. If p = 1, then
and thus
Now, if
, then removing edges
and
provides a forest F with three components, two of which are single vertices and the third one is a double star
In this case,
yielding
. In the sequel we may assume that
, and so
. Root T at
If , then let F be the forest obtained from T by removing edges
and
Clearly any
-function f such that
is maximized, assigns {1} or {2} to x3 and {1, 2} to x2, and the function h defined on V(T) by
and
otherwise, is an I2RDF of T of weight less than
and thus
. Therefore we may assume that
. Similarly, we can assume that each child of x4 with depth 2 has degree at least 3. Let
. We proceed with the following cases.
Case 1. .
Let w be a leaf neighbor of x2 different from x1 and let F be the forest obtained from T by removing edges and
. Let f be an
-function. Since x1 is isolated in F and vertices
, w induce a P2 component in F, we must have
and either
or
, say
and thus
. Now the function g defined on V(T) by
and
otherwise, is an I2RDF of T of weight less than
leading to the desired result.
Case 2. and x3 has a child of degree 2.
Without loss of generality, let y1 be a child of x3 with degree two and let be the leaf neighbor of
Let F be the forest obtained from T by removing edges
and
. Let f be an
-function such that
is as large as possible. Since x1 is isolated in F and vertices y1,
induce a P2 component of F, we must have
and either
or
, say
and thus
. Now, if
, say
then the function g defined on V(T) by
and
otherwise, is an I2RDF of T of weight less than
. Hence assume that
. Since x2 has at least two leaf neighbors in F, by the choice of f we have
and thus the function g defined on V(T) by
and
otherwise, is an I2RDF of T of weight less than
. In either case,
Case 3. and x3 is a support vertex.
Considering Cases 1 and 2 we may assume that each child of x3 is either a leaf or has degree at least four. Without loss of generality, let y1 be a leaf neighbor of x3. Let F be the forest obtained from T by removing edges and
and let f be an
-function. Since x1 and y1 are isolated in F, we have
. Now, if
, then
and the function g defined on V(T) by
and
for the remaining vertices, is an I2RDF of T of weight less than
. If
, then
and the function g defined on V(T) by
and
otherwise, is an I2RDF of T of weight less than
and both situations lead to
. Hence we can assume that
and
. Then all leaves adjacent to x2 in F must be assigned non-empty sets under f, and this case it is clear that
. If
, then the function g defined on V(T) by
for
,
and
for the remaining vertices, is an I2RDF of T of weight less than
and thus
. Hence assume that
. Then
and y1 is the only leaf adjacent to x3. Thus x4 has a neighbor
such that
. Now the function g defined on V(T) by
,
for
and
for the remaining vertices, is an I2RDF of T of weight less than
and thus
.
Case 4. and any child of x3 has degree at least 4.
According to the above cases, every yi has at least three leaf neighbors, say
. Let F be the forest obtained from T by removing edges
and
and let
be an
-function such that
is as large as possible. Since x1 and
are isolated in F we have
Note that since x2 and y1 remains support vertices in F, each with at least two leaf neighbors, these two vertices will be assigned either {1, 2} or
under f. Now, if
, then the function g defined on V(T) by
and
otherwise, is an I2RDF of T of
. Also, if
and
(the case
and
is similar), then the function g defined on V(T) by
and
otherwise, is an I2RDF of T of weight less than
. Finally, we assume that
and
. The choice of f implies that
. It follows that
for each
and
for each
. If
, then the function g defined on V(T) by
for all
for
and
otherwise, is an I2RDF of T of weight less than
. Therefore we may assume that
. If
(the case
is similar), say
, then the function g defined on V(T) by
for all
,
for
and
otherwise, is an I2RDF of T of weight less than
. Hence let
and
. In this case, define an I2RDF g on V(T) by
for all
for
and
otherwise. Clearly, g is an I2RDF of T of weight less than
In either case, we have shown that
and thus
Case 5. .
It follows from the choice of the diametral path that each child of x3 with depth one has degree 2. Thus the maximal subtree rooted at x3 is a spider. Similarly, we may assume that the maximal subtree rooted at any child of x4 with depth 2 is a spider. Let us examine the following situations.
Subcase 5.1. and x3 has a leaf neighbor.
Let y1 be the leaf neighbor of x3 and let F be the forest obtained from T by removing edges Let f be an
-function such that
is maximized. Since x3, y1 induce a P2 component of F and the same for x1 and x2, by the choice of f we have
. In this case, the function g defined on V(T) by
and
otherwise, is an I2RDF of T of weight
implying that
By Subcase 5.1, we may assume that or
and x3 has two children with depth 1 and degree 2.
Subcase 5.2. .
Let F be the forest obtained from T by removing edges and let f be an
-function such that
is maximized. Clearly
and by the choice of f we must have
. Without loss of generality, assume that
, and consider the function g defined on V(T) by
and
and
otherwise. Then g is an I2RDF of T of weight
yielding
Subcase 5.3. and x4 has a child w of degree two which is a support vertex.
Let be a leaf neighbor of w and consider the forest F obtained from T by removing edges
. Let f be an
-function of F such that
is maximized. Then we must have
. Now if
and
(the case
is similar), then reassigning the set {2} to
provides an I2RDF T of weight smaller than
. Likewise, if
and
(the case
is similar), then reassigning the set {2} to x1 provides an I2RDF of T of weight smaller than
. Hence we can assume that
. Thus the function g defined on V(T) by
for
for
and
otherwise, when x3 is not a support vertex, and by
for
for
and
otherwise, when x3 is a support vertex, is an I2RDF of T of weight less than
, and therefore in any case
.
Subcase 5.4. and v4 is a support vertex.
Let w be a leaf neighbor of x4 and consider the forest F obtained from T by removing edges . Let f be an
-function such that
is maximized. Obviously,
and
. Now if
, then reassigning an empty set to w we get an I2RDF T of weight
. Hence let
. If
and
, then reassigning the set {2} to x1 provides again an I2RDF of T of weight
. Hence we assume that
and
. Then
for each leaf neighbor z of x3 and
for each child a of x3 with depth 1 and degree 2, where
is the leaf adjacent to a. If
, then define the function g on V(T) by
,
for
for
and
otherwise, when x3 is a support vertex, and
for
for
and
otherwise when x3 is not a support vertex. Clearly since by assumption
or
and x3 is not a support vertex, the function g is an I2RDF of T of weight less than
Finally we can assume that
say
. Then w is the only leaf neighbor of x4. Also by considering Subcase 5.3, we may assume that any child of x4 with depth 1 has degree at least three. On the other hand, we may assume that the maximal subtree rooted at each child of x4 with depth 2 is either a P5 whose center vertex is adjacent to x4 or a spider with maximum degree at least three. Thus f can be chosen such that each child of x4 with depth 2 is 2-rainbow dominated by its children. Now, if x5 has a neighbor in
, then define the function g on V(T) by
,
for
for
and
otherwise when x3 is a support vertex, and
for
,
for
and
otherwise, when x3 is not a support vertex. Clearly whatever the case, g is an I2RDF of T of weight less than
Hence we can assume that x5 has a neighbor z in
. Define the function g on V(T) by
,
for
for
and
otherwise when x3 is a support vertex, and
for
for
and
otherwise, when x3 is not a support vertex. Again whatever the case, g is an I2RDF of T of weight less than
In any case seen before, we conclude that
By Subcases 5.1, 5.2, 5.3, and 5.4 we may assume that the maximal subtree at each child of x4 (which is also the center vertex of such a subtree) is either a star of order at least three or a path P5 or a spider with maximum degree at least 3. Consider the forest F obtained from T by removing edges and let f be an
-function such that each child of x4 is either assigned a non-empty set under f or 2-rainbowly dominated by its neighbors. Clearly
. If
and
, then the function g defined on V(T) by
,
and
otherwise, is an I2RDF of T of weight less than
. Hence we assume that
. If
, then the function g on V(T) by
,
for
for
and
otherwise, when x3 is a support vertex, and
for
,
for
and
otherwise, when x3 is not a support vertex, is an I2RDF of T of weight less than
Hence we can assume that
. If x5 has a neighbor in
, then define the function g defined on V(T) by
for each
for
for
and
otherwise, is an I2RD-function of T of weight less than
Finally, suppose that x5 has a neighbor z in
. Define the function g on V(T) by
,
for
for
and
otherwise when x3 is a support vertex, and
for
for
and
otherwise, when x3 is not a support vertex. Clearly, whatever the case, g is an I2RDF of T of weight less than
Therefore in either case we have
and the proof is complete. □
Disclosure statement
The authors declare that they have no conflict of interest.
Data availability statement
Data sharing is not applicable to this article as no datasets were generated or analyzed during the current study.
Additional information
Funding
References
- Abdollahzadeh Ahangar, H., Amjadi, J., Jafari Rad, N., Samodivkin, V. D. (2018). Total k-rainbow domination numbers in graphs. Commun. Comb. Optim. 3: 37–50.
- Amjadi, J., Falahat, M., Chellali, M., Sheikholeslami, S. M. (2015). Unicyclic graphs with strong equality between the 2-rainbow domination and independent 2-rainbow domination numbers. Trans. Comb. 4:1–11.
- Amjadi, J., Mohammadi, N., Sheikholeslami, S. M., Volkmann, L. (2015). Independent 2-rainbow domination in trees. Asian-Eur. J. Math. 8:ID: 1550035, 8pp.
- Brešar, B. (2020). Rainbow domination in graphs. In: Haynes, T. W., Hedetniemi, S. T., Henning, M. A., eds. Topics in Domination in Graphs. Berlin/Heidelberg: Springer, pp. 411–443.
- Brešar, B., Henning, M. A., Rall, D. F. (2000). Rainbow domination in graphs. Taiwanese J. Math. 12: 213–225.
- Chellali, M., Jafari Rad, N. (2015). Independent 2-rainbow domination in graphs. J. Comb. Math. Comb. Comput. 94: 133–148.
- Dehgardi, N., Sheikholeslami, S. M., Volkmann, L. (2014). The k-rainbow bondage number of a graph. Discrete Appl. Math. 174:133–139.
- Fink, J. F., Jacobson, M. S., Kinch, L. F., Roberts, J. (1990). The bondage number of a graph. Discrete Math. 86: 47–57.
- Furuya, M., Koyanagi, M., Yokota, M. (2018). Upper bound on 3-rainbow domination in graphs with minimum degree 2. Discrete Optim. 29: 45–76.
- Garey, M. R., Johnson, D. S. (1979). Computers and Intractability: A Guide to the Theory of NP-Completness. San Francisco:Freeman.
- Haynes, T. W., Hedetniemi, S. T., Slater, P. J. (1998). Fundamentals of Domination in Graphs, New York: Marcel Dekker, Inc.
- Jafari Rad, N., Kamarulhaili, H. (2017). On the complexity of some bondage problems in graphs. Australas. J. Comb. 68: 265–275.
- Jafari Rad, N., Gholami, E., Tehranian, A., Rasouli, H. (2023). A new upper bound on the independent 2-rainbow domination number in trees. Commun. Comb. Optim. 8: 261–270.
- Jafari Rad, N., Maimani, H. R., Momeni, M., Rahimi Mahid, F. (2022). On the double Roman bondage numbers of graphs. Discrete Math. Algorithms Appl. 14: 2250046.
- Jafari Rad, N., Volkmann, L. (2011). Roman bondage in graphs. Discuss. Math. Graph Theory 31: 763–773.
- Jafari Rad, N., Volkmann, L. (2011). On the Roman bondage number of planar graphs. Graphs Comb. 27: 31–538.
- Jiang, H., Shao, Z. (2022). Quasi-total Roman bondage number in graphs. AKCE Int. J. Graphs Comb. 19:221–228.
- Kang, L., Yuan, J. (2000). Bondage number of planar graphs. Discrete Math. 222: 191–198.
- Kosari, S., Amjadi, J., Khan, A., Volkmann, L. (2023). Independent Italian bondage of graphs. Commun. Comb. Optim. 8: 649–664.
- Kosari, S., Amjadi, J., Chellali, M., Sheikholeslami, S. M. (2023). Independent Roman bondage of graphs. RAIRO - Oper. Res. 57:371–382.
- Mahmoodi, A., Volkmann, L. (2023). Outer-independent total 2-rainbow dominating functions in graphs. Commun. Comb. Optim. 8: 431–444.
- Mansouri, Z., Mojdeh, D. A. (2020). (Independent) k-rainbow domination of a graph. Turk. J. Math. Comput. Sci. 12: 128–135.
- Ojakian, K., Škrekovski, R., Tepeh, A. (2021). Bounding the k-rainbow total domination number. Discrete Math. 344: ID: 112425.
- Pham, A., Wei, B. (2022). Independent bondage number of planar graphs with minimum degree at least 3. Discrete Math. 345:113072.
- Priddy, B., Wang, H., Wei, B. (2019). Independent bondage number of a graph. J. Comb. Optim. 37(2): 702–712.
- Shao, Z., Li, Z., Peperko, A., Wan, J., Žerovnik, J. (2019). Independent rainbow domination of graphs. Bull. Malaysian Math. Sci. Soc. 42: 417–435.