
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Alternating Euler trails has been extensively studied for its diverse practical and theoretical applications. Let H be a graph possibly with loops and G be a multigraph without loops. In this paper we deal with any fixed coloration of E(G) with V(H) (H-coloring of G). A sequence in G, where for each
and
is an edge in G, for every
, is a dynamic H-trail if W does not repeat edges and
is an edge in H, for each
. In particular, a dynamic H-trail is an alternating trail when H is a complete graph without loops and ki
= 1, for every
. In this paper, we introduce the concept of dynamic H-trail, which arises in a natural way in the modeling of many practical problems, in particular, in theoretical computer science.
We provide necessary and sufficient conditions for the existence of closed Euler dynamic H-trail in H-colored multigraphs. Also we provide polynomial time algorithms that allows us to convert a cycle in an auxiliary graph, , in a closed dynamic H-trail in G, and vice versa, where
is a non-colored simple graph obtained from G in a polynomial time.
1 Introduction
For basic concepts, terminology and notation not defined here, we refer the reader to [Citation3] and [Citation5]. Throughout this work, we will consider graphs, multigraphs (graphs allowing parallel edges) and simple graphs (graphs with no parallel edges nor loops). Let V(G) and E(G) the sets of vertices and edges of a multigraph G, respectively.
A spanning circuit in a graph G is defined as a closed trail that contains each vertex of G. We will say that a graph is supereulerian if it contains a spanning circuit. Let T be a spanning circuit in G: if T visits each vertex of G exactly once, then T will be called Hamilton cycle; and if T visits each edge of G, then T will be called Euler trail. We will say that a graph is hamiltonian if it has a Hamilton cycle and eulerian if it contains an Euler trail.
In [Citation15], Harary and Nash-Williams introduced the following graphs. Let G be a graph with p vertices and q edges. For , let
the graph with nq vertices that are obtained as follows: for each edge e = uv of G, we take two vertices f(u, e) and f(v, e) in
and adding a path with n – 2 new intermediate vertices connecting f(u, e) and f(v, e); finally, for each vertex u of G, we add an edge joining f(u, e) and f(u, g), whenever e and g are distinct edges with end point u. They also proved the followings relationships between eulerian graphs and hamiltonian cycles of
.
Theorem 1
(Harary and Nash-Williams [Citation15]). Let G be a graph. The following assertions holds:
If G is eulerian, then
is hamiltonian, for every
If
G is superulerian if and only if
An edge-coloring of a graph G is defined as a mapping , where
is the set of natural numbers. We will say that G is an edge-colored graph whenever we are taking a fixed edge-coloring of G. A properly colored spanning circuit is a spanning circuit with no consecutive edges having the same color, including the first and the last in a closed spanning circuit. An edge-colored graph is supereulerian, if G contains a properly colored spanning circuit. Several authors have worked with this concept, for example, Bang-Jensen et al. [Citation2]; Guo et al. [Citation13]; Guo et al. [Citation14]. Properly colored walks are of interest as a generalization of walk in undirected and directed graphs, see [Citation3], as well as, in graph theory application, for example, in genetic and molecular biology [Citation9, Citation10, Citation20], social science [Citation6], channel assignment is wireless networks [Citation1, Citation18]. For more details on properly colored walks, we refer the reader to Chapter 16 of [Citation3].
Kotzig [Citation16] gave the following characterization of edge-colored multigraphs containing properly colored closed Euler trail.
Theorem 2
(Kotzig [Citation16]). Let G be an edge-colored eulerian multigraph. Then G has a properly colored closed Euler trail if and only if , where
is the number of edges with color i incident with x, for each vertex x of G.
Different kinds of edge-coloring in undirected and directed graphs have been studied, for example, in [Citation17] the arcs of a tournament were colored with the vertices of a poset. In this paper we will consider the following edge-coloring. Let H be a graph possibly with loops and G be a graph without loops. An H-coloring of G is a function . We will say that G is an H-colored graph, whenever we are taking a fixed H-coloring of G. A walk
in G, where
for every i in
, is an H-walk if
is a walk in H, with
for every
. We will say that W is closed if
and
. Let W be an H-walk, if W is a trail then W will be called H-trail. Notice that if H is a complete graph without loops, then an H-walk is a properly colored walk.
Since, properly colored walks have been very useful for modeling and solving different problems, as we mentioned above, H-colored graphs and H-walks can also model interesting problems, for example, routing problems or in communications networks were some transitions are restricted because of natural phenomenon, external attack or failure. More applications of colored walks with restrictions in color’s succession can be found in [Citation19].
The concepts of H-coloring and H-walks were introduced, for the first time by Linek and Sands in [Citation17], and have been worked mainly in the context of kernel theory and related topics, see [Citation7, Citation8, Citation12].
Galeana-Sánchez et al. [Citation11] defined the graph Gu
as follows: Let u be a vertex of G; Gu
is the graph such that , and two different vertices a and b are joining by only one edge in Gu
if and only if c(a) and c(b) are adjacent in H.
They also showed necessary and sufficient conditions for the existence of closed Euler H-trails, as follows.
Theorem 3
(Galeana-Sánchez et al. [Citation11]). Let H be a graph possibly with loops and G be an H-colored multigraph without loops. Suppose that G is Eulerian and Gu
is a complete ku
-partite graph, for every u in V(G) and for some ku
in . Then G has a closed Euler H-trail if and only if
for every u in V(G), where
is the partition of
into independent sets.
Benítez-Bobadilla et al. [Citation4] introduced a generalization of H-walk as follows. They allowed “lane changes”, i.e., they allowed concatenation of two H-walks as long as, the last edge of the first one and the first edge of the second one satisfy that and
. As a result, they defined the following new concept: Let G be an H-colored multigraph, a dynamic H-walk in G is a sequence of vertices
in G such that for each
there exists an edge
and there exists an edge
such that
is an edge in H.
For the purpose of this paper, we need a definition and notation that will allows us to know the edges that belong to a dynamic H-walk. So, we will say that , where for each
and
for every
, is a dynamic H-walk if
is an edge in H, for each
. If W is a dynamic H-walk that does not repeat edges, then W will be called dynamic H-trail. We will say that a dynamic H-trail, W, is an Euler dynamic H-trail if
. We will say that a dynamic H-trail is a closed dynamic H-trail whenever a)
and
is an edge in H; or b)
and
and
are parallel in G. Notice that if W is a closed dynamic H-walk that satisfies condition b, then W can be rewrite as
, and W satisfies condition (a) (unless n = 1, i.e., W is of the form
, where
).
It follows from the definition of dynamic H-trail that every H-trail in G is a dynamic H-trail in G. Moreover, if G has no parallel edges, then every dynamic H-trail is an H-trail.
A motivation for the study of dynamic H-walks are their possibles applications. For example, suppose that it is require to send a message from point A to point B through communication network which can have faults in its links (such as damage, attack, virus or blockage), where each one of its edge has an assigned color depending on the probability that the message is delivered correctly (in time, complete, unchanged or virus-free). In this case, the vertices of H are the colors assigned to the edges of the network and the set of edges of H will depend on the transitions that are convenient (for example, if transition with the same probability of failure are forbidden, then H will have no loops). In practice, it is possible to send messages simultaneously over two or more connections. In these cases, the use of dynamic H-walks can improve message delivery.
Motivated by Theorem 3 and its proof, we think that it is possible to give conditions, similar to those of Theorem 3, on an H-colored multigraph that guarantee the existence of closed Euler dynamic H-trail. In the process, we find an auxiliary graph, we call it , that allows us to link the closed dynamic H-trails with hamiltonian graphs. As a result, we will prove that G contains a closed Euler dynamic H-trails if and only if
is hamiltonian, for every
.
2 Main results
In what follows, H will be a graph possibly with loops, and G will be a multigraph without loops.
First of all, we will introduce an auxiliary graph, denoted by , which is defined as follows.
Definition 1.
Let G be an H-colored multigraph with . For
is the graph with nq vertices, obtained as follows: for each edge e = uv of G, we take two vertices f(u, e) and f(v, e) in
, and adding a path with n – 2 new intermediate vertices connecting f(u, e) and f(v, e). And the rest of the edges of
are defined as follows: a) f(u, e) and f(u, g) are adjacent iff
and
; b) f(u, e) and f(v, g) are adjacent iff
and e and g are parallel in G.
Notice that is a simple graph.
Before giving a new way to construct the graph , we first introduce some additional notation.
Recall that Gu
is the graph such that , and two different vertices a and b are joining by only one edge in Gu
if and only if c(a) and c(b) are adjacent in H. Notice that
can also be denoted as
.
For each e = xy in E(G), by the definition of Gx
and Gy
, we have that and
. So, we will say that f(x, e) and f(y, e) are the copies of e seen as a vertex in Gx
and Gy
, respectively; and if Exy
is the set of all the edges with end vertices x and y, then we will say that
.
Notice that can be constructed as follows. First take the disjoint union of Gx
, for every x in V(G). Then, for every pair of distinct vertices, x and y in V(G), such that
, we will have a complete bipartite graph
between
and
. Finally, for every
, we change the edge joining f(x, e) and f(y, e) by a path with n – 2 new intermediate vertices. The construction of
is illustrated in .
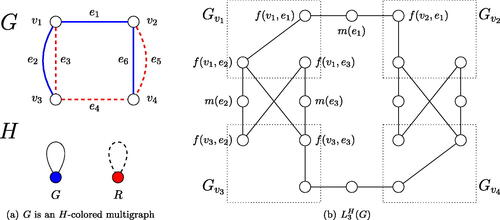
Fig. 1 The sequence is a closed Euler dynamic H-trail in G but there is no closed Euler H-trail in G.
It follows from the definition of that
is a perfect matching, that we will called it joint matching of
.
The following two lemmas show how to construct a cycle in , based on the order of the edges in a closed dynamic H-trail in G, and vice versa.
Lemma 4.
Let G be an H-colored multigraph. If is a closed dynamic H-trail in G, then
is a cycle in
.
Proof.
It follows from the definition of that
is an edge of
, for every
.
Let ei
and be consecutive edges in P (if
, then
). If ei
and
are parallel, such that xj
and
are the ends of both edges, then
and
are adjacent in
, by the definition of
. Otherwise, ei
and
are incident with xj
, for some xj
in V(P). Since P is a closed dynamic H-trail, then
is an edge in H and
. Hence, C is a walk in
. Since, P is a closed dynamic H-trail, then C does not repeat vertices and, so C is a cycle. Moreover, C alternate edges between
and MJ
. □
Lemma 5.
Let G be an H-colored multigraph and MJ
be the joint matching of . If
, where
, is a cycle in
that alternate edges between
and MJ
, then the following steps produces a closed dynamic H-trail in G.
Star with
Let ek , with end vertices xk and yk . If
If
Proof.
First, we will prove that P is a dynamic H-trail in G.
Let and ek
, with
.
Since , we have that
is in
. Hence,
and
or
and
and ek
are parallel in G.
If and
, then
and ek
are incident in
and
is a dynamic H-walk in G.
Otherwise, and
and ek
are parallel edges in G, and
is a dynamic H-walk in G.
Hence, P is a dynamic H-walk in G.
On the other hand, since C is a cycle, then ei
appears exactly once in P, for every , and so P is a dynamic H-trail.
Now, we prove that P is closed.
Recall that , for every
, and
or
and
(if
, then
and
). We will consider two cases.
Case 1. xi
= xj
and yi
= yj
, for every pair of distinct elements, i and j, in .
It follows from the construction of P that . Since C is a cycle in
, then
and, so P is closed.
Case 2. There exists i in such that
.
If , then
. Therefore, P is closed.
Otherwise, eq and e1 are parallel and, so P is closed.
Therefore, P is a closed dynamic H-trail in G. □
It follows from Lemmas 4 and 5 the following result.
Theorem 6.
Let G be an H-colored multigraph and MJ
be the joint matching. Then, there is a bijection between the set of closed dynamic H-trails in G and the set of cycles in that alternate edges between
and MJ
.
Proof.
Let G be an H-colored multigraph and MJ
the joint matching of . We will denote by
the set of closed dynamic H-trails in G and by
the set of cycles in
that alternate edges between
and MJ
.
Let defined by T(P) = C, where
, and
.
Claim 1. T is well-defined.
It follows from Lemma 4 that .
Let and
in
such that P1 = P2.
Since P1 = P2, then and there exists
such that
(since the edges are traversed in the same order but the first edge is not the same). It follows from the definition of T that
and the order of the vertices are the same. Then, we have that
. Therefore, T is well-defined.
Claim 2. T is injective.
Let P1 and P2 in such that
.
If , then
and, so
. Otherwise, since
, then there exists
such that ei
is the edge preceding
in P1 and ei
is not the edge preceding
in P2. Therefore,
and T is injective.
Claim 3. T is surjective.
Let C be a cycle in . Since C alternate edges between
and MJ
, C must be of the form
, where
.
It follows from the definition of T that T(P) = C, where P be the closed dynamic H-trail obtained by applying the Lemma 5 to the cycle C. Hence, T is surjective.
Therefore, T is a bijection. □
Recall the following classical lemma, which will be useful for what follows.
Lemma 7.
Let M and be two perfect matching of a graph G. If
, then there exists a partition of the vertices of G into even cycles. Moreover, every cycle alternate edges between M and
.
Theorem 8.
Let G be an H-colored multigraph and MJ
be the joint matching of . There exists a perfect matching M in
if and only if there exists a partition of the edges of G into closed dynamic H-trails. (Notice that some of the closed dynamic H-trails can be of the form
, where
).
Proof.
Let G be an H-colored multigraph and MJ
be the joint matching of .
Suppose that there exists a perfect matching M in .
It follows by Lemma 7, that there exists a partition of the vertices of into vertex-disjoint cycles, say
. Moreover, each cycle in
alternate edges between MJ
and M.
Let be the set of closed dynamic H-trails in G such that
, for every
.
Claim 1 , for every
.
Proceeding by contradiction, suppose that there exists a pair of distinct elements, i and j in , such that
.
Let , it follows from the definition of T that f(x, e) and f(y, e) are vertices in
, a contradiction.
Claim 2 .
By the definition of T, we have that .
On the other hand, let join x and y. Since,
is a partition of the vertices of
, then there exists a cycle in
, say Cj
, such that
. It follows from the construction of Pj
that
. Therefore,
and
.
Therefore, is a partition of the edges of G into closed dynamic H-trails.
Conversely, suppose that there exists a partition of the edges of G into closed dynamic H-trails, say .
Let a set of cycles in
such that
, for every
.
Claim 3 If , then
.
Suppose, to the contrary, that there exists i and j in , such that
. Let
, for some
and
, such that e is incident with x.
It follows from the construction of Ci
and Cj
that and
, a contradiction.
Claim 4 .
By the construction of Ci
, we have that .
Let , with
and
, such that e is incident with x.
Since is a partition of the edges of G, then there exists
such that
. It follows from the construction of Ci
that
. Hence,
.
Therefore, .
Claim 5 is a perfect matching in
.
Recall .
It follows from the construction of Ci
and claims 3 and 4 that M is a perfect matching in .
Therefore, M is a perfect matching in , such that
. □
Theorem 9.
Let G be an H-colored multigraph. Then:
If G has a closed Euler dynamic H-trail, then
If
G has a closed Euler dynamic H-trail if and only if
Proof.
Let G be an H-colored multigraph.
It follows from Theorems 6 and 8 and definition of
b. Suppose that there exist
Then, every path from f(x, e) to f(y, e) is in in some order, for every e = xy in E(G), by the definition of
. Hence, we replace the path for the edge
to
, and we get a hamiltonian cycle in
, say C.
Since C is a hamiltonian cycle, then is a closed Euler dynamic H-trail in G, by Theorem 8.
It follows from a and b. □
In Theorem 9, we cannot change by
because there are H-colored multigraphs without closed Euler dynamic H-trail and
is hamiltonian, see .
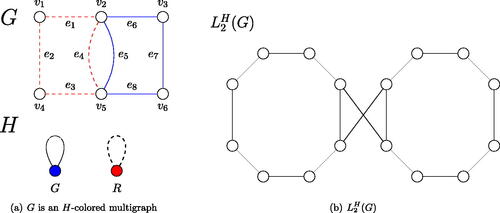
Fig. 2 The graph is hamiltonian but there is no closed Euler dynamic H-trail in G.
Recall that Exy is the set of all the edges with end vertices x and y.
Definition 2.
Let G be an H-colored multigraph and M be a matching in . For each x in V(G), we will say that
, i.e., Mx
consists of the edges in Gx
that are in M. And, for every pair of vertices x and y in V(G), such that
, we will define the following sets:
is Mx
-saturate and f(y, e) is not My
-saturate
;
is My
-saturate and f(x, e) is not Mx
-saturate
;
is Mx
-saturate and f(y, e) is My
-saturate
; and
is not Mx
-saturate and f(y, e) is not My
-saturate
.
Theorem 10.
Let G be an H-colored multigraph. There exists a partition of the edges of G into closed dynamic H-trails, none of them in the form , if and only if there exists a non empty matching, say M, in
, such that for each set
one of the following conditions hold: a)
; b)
and
.
Proof.
Let G be an H-colored multigraph and MJ
be the joint matching of .
Suppose that is a partition of the edges of G into closed dynamic H-trails, such that none of them have the form
.
By Theorem 8, there exists a perfect matching in . Let M be the perfect matching obtained as in the proof of Theorem 8, i.e.,
.
Let x and y be a pair of vertices in G, such that , with
. Since
is a partition of the edges of G into closed dynamic H-trails, then there exists
such that
, say
.
Since P1 is not of the form , and
, then
, where
and
. (Recall that Mx
consists of the edges in Gx
that are in M).
If , then
. Hence,
and
are in M.
Therefore, and
.
On the other hand, if , then
,
and
are in M, for every
, see . Hence,
,
and
, for every
.
Fig. 3 In b, the continued edges are in M and the dashed edges are in MJ .
If , then
(when
occurs) or
and
(when
). So, suppose that
, then there exists
, such that
.
Since P is not of the form , and
, then
, where
. We will consider two cases.
If , then
. By the construction of M we have that the edges
and
are in M. Thus,
and
.
On the other hand, if , then
and
are in M, for every
. Hence,
and
, for every
.
If , then
(when
) or
and
(when
or
). Otherwise, there exists
, such that
and we can repeat this procedure and after a finite number of steps we obtain that
or
and
.
Now, suppose that there exists M, a matching in , such that for every set
, it holds that:
or
and
.
If M is a perfect matching in , then there exists a partition of E(G) into closed dynamic H-trails, by Theorem 8. So, suppose that M is not a perfect matching in
. Recall that
, for every
.
Since or
, then for every
.
Let . Notice that N is a matching in
and
. So, for every set
, it holds that:
or
and
.
Let x and y be two different vertices in V(G), such that .
If , then f(x, e) and f(y, e) are N-saturate, for every
. So, we do not add any edge to N.
On the other hand, if and
, then we will consider Gxy
, the subgraph of
induced by the set
.
Since , then
. Let
and
, since
we have that
.
If , then we add the edges
to N, for every
. By the definition of the edges of
(point b) and the definition of Gxy
, we have that
. Moreover,
is still a matching.
On the other hand, when , let
. We add the edges
,
and
to N, for every
and
.
By the definition of the edges of and the definition of Gxy
, we have that all the edges we add to N are in
and N is still a matching.
Thus, we add edges to N in such a way every vertex in Gxy is N-saturate.
So, we repeat the same process for x and y in V(G) such that .
Therefore, N is a perfect matching in and there exists a partition of E(G) into closed dynamic H-trails, by Theorem 8 and, by the construction of N, none of them is of the form
, with
. □
The following result shows a condition on the graph Gx that guarantees the existence of closed Euler dynamic H-trail.
Theorem 11.
Let G be a connected H-colored multigraph, such that Gu
is a complete ku
-partite graph for every and for some ku
in
. Then G has a closed Euler dynamic H-trail if and only if there exists a matching M in
, such that for every set
one of the following conditions hold: a)
; or b)
and
.
Proof.
Let G be a connected H-colored multigraph, such that Gu
is a complete ku
-partite graph for every and for some ku
in
.
Suppose that G has a closed Euler dynamic H-trail, say P.
Case 1. P is not of the form , with
.
In this case there exists a matching, say M, in , such that for every set
one of the following conditions hold:
or
and
.
Case 2. , with
.
In this case, since Gx
is a complete kx
-partite graph, for some , then there exists two edges e and f in
, such that
. Suppose, without loss of generality, that
.
If k = 2, then is a closed Euler dynamic H-trail. Otherwise, since Gx
is kx
-partite graph, we have that
or
.
Hence, or
is a closed Euler dynamic H-trail. By Theorem 10, there exists a matching M in
, such that for every set
or
and
.
Conversely, suppose that there exists a matching M in , such that for every set
one of the following conditions hold:
or
and
.
It follows from Theorem 10 that there exists a partition of E(G) into closed dynamic H-trails, none of them in the form , with
, say
.
If k = 1, then and P1 is a closed Euler dynamic H-trail. Otherwise, since G is connected it follows that there exists
, say P2, such that
. Since P1 and P2 are closed, we can suppose that
, where
and
, and
, where
and
, such that x0 = y0. By the definition of dynamic H-trail, we have that
and
are in E(H). Furthermore,
and fn
are incident with x0 = y0. Hence,
and
are in
.
We will consider the following: if or
, for some
, it follows that
and
are in
, because
is a complete
-partite graph. In other case,
and
are in
.
By the definition of , we have that
and
are edges of H or
and
are edges of H.
If and
are edges of H, we have that
is a closed dynamic H-trail. And, if
and
are edges of H, we have that
is a closed dynamic H-trail.
If , then Q1 is a closed Euler dynamic H-trail. Otherwise, since G is connected it follows that there exists
, say P3, such that
. Since Q1 and P3 are closed, we can suppose that
, where
and
, and
, where
and
, such that v0 = u0. By the definition of dynamic H-trail, we have that
and
are in E(H). Furthermore,
and gt
are incident with u0 = v0. Hence,
and
are in
.
We will consider the following: if or
, for some
, it follows that
and
are in
, because
is a complete
-partite graph. In other case,
and
are in
.
By the definition of , we have that
and
are edges of H or
and
are edges of H.
If and
are edges of H, we have that
is a closed dynamic H-trail. And, if
and
are edges of H, we have that
is a closed dynamic H-trail.
If , then Q2 is a closed Euler dynamic H-trail. Otherwise, we repeat the procedure until we get the desired closed Euler dynamic H-trail. □
In Theorem 11 we cannot change the hypothesis “Gu
is a complete ku
-partite for every ” to “Gu
has a complete ku
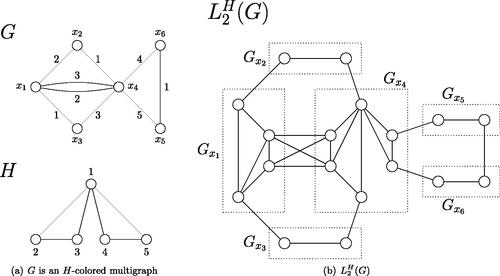
-partite spanning subgraph”, as shows.
Fig. 4 Gu
is a complete ku
-partite graph, for , and
has a bipartite spanning subgraph but there is no closed Euler dynamic H-trail in G.
Corollary 12.
Let G be an H-colored multigraph. Then Gx
has a perfect matching, for every , if and only if there exists a partition of E(G) into closed H-trails.
Proof.
Let G be an H-colored multigraph and MJ
be the joint matching of .
Suppose that Gx
has a perfect matching, for every , say Mx
. Let
.
It follows from the definition of MJ
that . Hence, G has a partition of its edges into closed dynamic H-trails, by Theorem 8.
Let be the partition that is obtained as in the proof of Theorem 8. It follows, from the construction of each dynamic H-trail in
, that there is no lane change. So,
is a partition of E(G) into closed H-trails.
Now, suppose that there exists a partition of E(G) into closed H-trails, say . By Theorem 8, there exists a perfect matching in
. Let M be the perfect matching that is obtained as in the proof of Theorem 8.
Let . Then, there exists
such that
. Since P is an H-trail and by the construction of M, it follows that
and
. Moreover,
.
Therefore, is a perfect matching of Gx
. □
Recall the following classical theorem, which will be useful.
Theorem 13
(Tutte [Citation21]). G has a perfect matching if and only if for all proper subset S of V(G).
Notice that if H is a complete graph without loops and G is an H-colored multigraph. Then P is a properly colored closed trail if and only if P is a closed H-trail.
Corollary 14
(Kotzig). Let G be an edge-colored eulerian multigraph. Then G has a properly colored closed Euler trail if and only if , where
is the number of edges with color i incident with x, for each vertex x of G.
Proof.
Let G be an H-colored multigraph, where H is a complete graph without loops and .
Let Gu
, with . It follows from the definition of Gu
and H is a complete graph that Gu
is a complete ku
-paritite graph with independent sets
, with
. Moreover,
.
Suppose that G has a closed Euler H-trail. By Corollary 12 Gu
has a perfect matching, for every .
Hence, , where
, by Theorem 13.
Suppose that , for each vertex x of G.
Claim 1. Gu has a perfect matching.
Let S be a proper subset of . Consider
.
Case 1. is connected.
Then .
Case 2. is disconnected.
Since Gu
is a complete ku
-partite graph, then , for some
. Hence
.
Therefore, it follows from Theorem 13 that Gu has a perfect matching.
Let , where Mu
is a perfect matching in Gu
. So, M is a perfect matching in
and
, for every
.
It follows from Theorem 11 and Corollary 12 that G has a closed Euler H-trail. □
Corollary 15
(Galeana-Sánchez et al.). Let H be a graph possibly with loops and G be an H-colored multigraph without loops. Suppose that G is Eulerian and Gu
is a complete ku
-partite graph, for every u in V(G) and for some ku
in . Then G has a closed Euler H-trail if and only if
for every u in V(G), where
is the partition of
into independent sets.
Acknowledgments
The authors wish to thank the anonymous referees for many suggestions which improved the rewriting of this paper.
Disclosure statement
The authors report there are no competing interests to declare
Additional information
Funding
References
- Ahuja, S. K. (2010). Algorithms for routing and channel assignment in wireless infrastructure networks. PhD thesis. University of Arizona, Arizona, USA.
- Bang-Jensen, J., Bellitto, T., Yeo, A. (2021). Supereulerian 2-edge-coloured graphs. Graphs Comb. 37(6): 2601–2620.
- Bang-Jensen, J., Gutin, G. Z. (2008). Digraphs: Theory, Algorithms and Applications. London: Springer.
- Benítez-Bobadilla, G.,Galeana-Sánchez, H., Hernández-Cruz, C. (2019). Characterization of color patterns by dynamic H-paths. Discrete Appl. Math. 267:41–51.
- Bondy, J. A., Murty, U. S. R. (1976). Graph Theory with Applications. London, UK: Macmillan.
- Chou, W., Manoussakis, Y., Megalakaki, O., Spyratos, M., Tuza, Z. (1994). Paths through fixed vertices in edge-colored graphs. Math. Inform. Sci. Humaines 127:49–58.
- Delgado-Escalante, P., Galeana-Sánchez, H. (2014). Restricted domination in arc-colored digraphs. AKCE Int. J. Graphs Comb. 11(1): 95–104.
- Delgado-Escalante, P., Galeana-Sánchez, H., Ramírez, L. P. (2012). Independent restricted domination and the line digraph. AKCE Int. J. Graphs Comb. 9(1): 31–42.
- Dorninger, D. (1994). Hamiltonian circuits determining the order of chromosomes. Discrete Appl. Math. 50(2): 159–168.
- Dorninger, D., Timischl, W. (1987). Geometrical constraints on Bennett’s predictions of chromosome order. Heredity 58: 321–325.
- Galeana-Sánchez, H., Rojas-Monroy, R., Sánchez-López, R., Villarreal-Valdés, J. I. (2019). Some conditions for the existence of Euler H-trails. Graphs Comb. 35(5): 1197–1208.
- Galeana-Sánchez, H., Sánchez-López, R. (2013). H-kernels in infinite digraphs. Graphs Comb. 29(4): 913–920.
- Guo, Z., Broersma, H., Li, B., Zhang, S. (2020). Almost Eulerian compatible spanning circuits in edge-colored graphs. Discrete Math. 344(1): 112174.
- Guo, Z., Li, B., Li, X., Zhang, S. (2020). Compatible spanning circuits in edge-colored graphs. Discrete Math. 343(7): 111908.
- Harary, F., Nash-Williams, C. S. J. (1965). On Eulerian and Hamiltonian graphs and line graphs. Can. Math. Bull. 8(6): 701–709.
- Kotzig, A. (1968). Moves without forbidden transitions in a graph. Math. Slovaca 18(1): 76–80.
- Linek, V., Sands, B. (1996). A note on paths in edge-coloured tournaments. Ars Combin. 44: 225–228.
- Sankararaman, S., Efrat, A., Ramasubramanian, S., Agarwal, P. K. (2014). On channel-discontinuity-constraint routing in wireless networks. Ad hoc Networks 13: 153–169.
- Szachniuk, M., De Cola, M. C., Felici, G., Blazewicz, J. (2014). The orderly colored longest path problem–a survey of applications and new algorithms. RAIRO Oper. Res. 48(1): 25–51.
- Szachniuk, M., Popenda, M., Adamiak, R. W., Blazewicz, J. (2009). An assignment walk through 3D NMR spectrum. Proceedings of the 2009 IEEE Symposium on Computational Intelligence in Bioinformatics and Computational Biology. Nashville, TN, USA: IEEE, pp. 215–219.
- Tutte, W. T. (1947). The factorization of linear graphs. J. London Math. Soc. 1(2): 107–111.