
ABSTRACT
With the completion of Chinese BeiDou Navigation Satellite System (BDS), the world has begun to enjoy the Positioning, Navigation, and Timing (PNT) services of four Global Navigation Satellite Systems (GNSS). In order to improve the GNSS performance and expand its applications, Low Earth Orbit (LEO) Enhanced Global Navigation Satellite System (LeGNSS) is being vigorously advocated. Combined with high-, medium-, and low- earth orbit satellites, it can improve GNSS performance in terms of orbit determination, Precise Point Positioning (PPP) convergence time, etc. This paper comprehensively reviews the current status of LeGNSS, focusing on analyzing its advantages and challenges for precise orbit and clock determination, PPP convergence, earth rotation parameter estimation, and global ionosphere modeling. Thanks to the fast geometric change brought by LEO satellites, LeGNSS is expected to fundamentally solve the problem of the long convergence time of PPP without any augmentation. The convergence time can be shortened within 1 minute if appropriate LEO constellations are deployed. However, there are still some issues to overcome, such as the optimization of LEO constellation as well as the real time LEO precise orbit and clock determination.
1. Introduction
The United States, Russia, and the European Union have begun to deploy a new generation of Global Navigation Satellite Systems (GNSS) because of the high demands for spatial information. GPS constellation has included the fifth-generation BLOCK III navigation satellites (https://www.gps.gov/) with more frequencies, stronger signals, and longer life. Russia’s new generation satellite, GLONASS-K uses Code Division Multiple Access (CDMA) while maintaining Frequency Division Multiple Access (FDMA) signals. Moreover, Inclined Geo-Synchronous Orbit (IGSO) satellites are planned to enhance the regional services of GLONASS (https://www.glonass-iac.ru/). Europe is developing a new GNSS constellation called Kepler, which is equipped with advanced technologies such as optical clocks and laser inter-satellite links (Günther Citation2018). With the completion of global BeiDou constellation, Chinese BeiDou Navigation Satellite System (BDS) has gradually entered into a new stage where global Positioning, Navigation, Timing (PNT) system becomes available. According to the press conference of Chinese state council information office, China will promote the construction of the space-based Low Earth Orbit (LEO) satellite constellations to achieve centimeter level positioning for the world (http://www.scio.gov.cn/xwfbh/xwbfbh/wqfbh/42311/43394/index.htm). Moreover, Reid et al. (Citation2016a) examined how LEO constellations can be piggybacked to deliver navigation services in the form of a hosted payload.
Undoubtedly, the LEO Enhanced Global Navigation Satellite System (LeGNSS) will play an important role in future navigation satellite systems. However, the current research mainly focuses on its potential positioning capability, especially of fast Precise Point Positioning (PPP) convergence (Ke et al. Citation2015; Ge et al. Citation2018; Li et al. Citation2019b), while the overall research status has not yet been systematically addressed, especially for its challenges and future development trends. Therefore, this article will review the status of LeGNSS and analyze the opportunities and challenges in terms of LEO constellation design, operation mode, and positioning performance, etc. The structure of the article is as follows. The concept and the development of LeGNSS will be firstly introduced. Then the key technologies involved in the LeGNSS system will be analyzed, such as LEO constellation design, the advantages and challenges for precise orbit and clock offset determination, precise point positioning, ionospheric monitoring as well as earth rotation parameters determination. Finally, some discussions and suggestions are put forward for the future development of LeGNSS system.
2. Development status of LeGNSS
The first generation of satellite navigation system is the Transit navigation satellite system (Black Citation1990) developed by the United States, which deployed the navigation transmitter from ground to space and realized the all-weather, wide-area radio navigation system by using satellites for the first time. The space segment of the Transit system is composed of six polar LEO satellites operating at the height of 1000 km. The ground receivers receive the signals broadcasted by the satellites and use the Doppler technology for positioning. Due to the limited ground coverage for each satellite, hundreds of LEO satellites are required if the instantaneous positioning is required. Moreover, due to the constellation complexity, poor clock stability, and launch cost, the LEO satellites were replaced by the current GPS where Medium Earth Orbit (MEO) satellites are adopted (Commodore Citation2012). The great success of GPS has made other countries start to develop their own satellite navigation systems, such as Russia’s GLONASS, EU’s Galileo, China’s BDS, Japan’s Quasi-Zenith Satellite System (QZSS), India’s Indian Regional Navigation Satellite System (IRNSS), etc.
With the continuous improvement of satellite manufacturing and the reduction of launch costs, more and more organizations have begun to deploy communication satellite constellations in low earth orbit since the 1990s. The most typical one is the United States’ communications LEO constellation, i.e. Iridium (Fossa et al. Citation1998) and its subsequent Iridium II. In combination with the Iridium constellation, Boeing proposed the iGPS (Iridium GPS) plan, which aims to enhance the timing and positioning performance of GPS. Joerger et al. (Citation2010) theoretically demonstrates the possibility of iGPS as a fast, robust, and accurate floating-point carrier positioning on a large scale. At present, Iridium II can achieve navigation enhancement function through STL (Satellites Time and Location) pulse signals. Its signal landing strength is 30–40 dB, which is stronger than GPS signal. Its positioning accuracy is about 30–50 m and timing accuracy about 200 ns (Lu et al. Citation2020).
As shown in , many commercial companies and enterprises have proposed to establish a global LEO satellite constellation since 2015 in order to achieve global seamless communication network, such as SpaceX (McDowell Citation2020), Oneweb (Jewett Citation2020) of the United States, Samsung (Magan Citation2015) of South Korea, and Aerospace Science and Technology Group of China (Meng et al. Citation2018). These plans will bring many LEO satellite constellations, providing all-weather, low-latency Internet access services on a global scale. In the terms of SpaceX’s StarLink (McDowell Citation2020), the first phase of the project will be divided into three steps to deploy a total of more than 12,000 LEO satellites, and it has been starting the public test since Oct. 2020.
Table 1. A part of built or under construction of LEO constellations
The fast-developing LEO constellation has brought new opportunities and challenges to global satellite navigation. In recent years, more and more research results have demonstrated the broad prospects of LEO navigation satellites. Reid et al. (Citation2016a, Citation2016b) systematically explored the possibility and realization strategy of LeGNSS, demonstrating the huge potential of LEO constellations in PNT services from the aspects of signal strength, transit time, and geometric configuration of LEO satellites. China has also conducted relevant verification and preliminary studies on LeGNSS. The “Luojia-1A” developed by Wuhan University has navigation enhancement capability. The precision of pseudorange and carrier phase observations at high elevations is 1.5 m and 1.7 mm, respectively, which meets the requirements of navigation enhancement signals (Wang et al. Citation2018, Citation2019, Citation2020). Moreover, some researchers described the LEO enhanced Positioning and Timing (LePT) signal in detail and quantitatively evaluated the ranging performance of the LePT signal. The results showed that the signal can meet the requirements of the Tianxiang-1 satellite for LEO navigation enhancement system (Wu et al. Citation2020). In order to fill the gaps in LEO constellations for Internet and navigation enhancement, The China Aerospace Science and Technology Corporation plans to establish the “Hongyan” constellation (Meng et al. Citation2018), the China Aerospace Science and Industry Co., Ltd. plans the “Hongyun” project (CNAGA Citation2017), while Beijing Future Navigation Technology Co., Ltd. plans the “Centispace” constellation. All of them launched the first experimental satellite in 2018 and started testing the augmentation constellation. All these imply that a new era with LEO enhanced GNSS is coming. It is necessary to have a comprehensive review of the development of LeGNSS and to dig out the potential advantages and challenges of this system.
3. LeGNSS conception
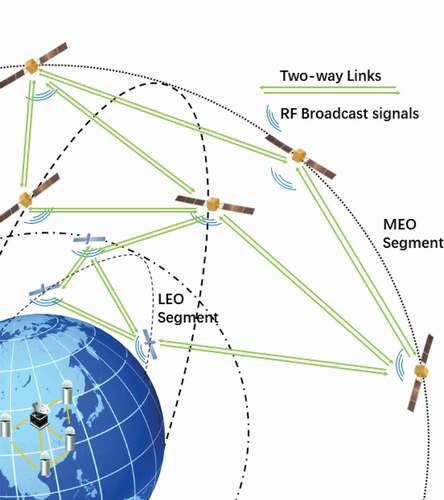
Li et al. (Citation2019) has discussed the operating mechanism of LeGNSS system, which is shown in . The MEO navigation satellites and LEO navigation satellites broadcast L-band navigation signals to the ground. The ground tracking stations transmit the received observation data to the data analysis center in real time. The analysis center generates the orbit and clock determination for MEO and LEO satellites as well as their prediction. Then the orbit and clock results are uploaded to each satellite. All satellites broadcast satellite ephemeris along with carrier phase signals. With the satellite-broadcasted messages and signals, the users around the world conduct PNT campaigns.
Figure 1. Conception of LeGNSS operating mechanism.
4. Opportunities and challenges of LeGNSS
The operating mechanism seems to be basically the same as the current GNSS. However, due to the lower orbital height and higher motion speed of LEO satellites, there are many challenges to operate such a system. The research status (opportunities and challenges) of LeGNSS in terms of LEO constellation design, precise orbit and clock determination, rapid PPP convergence, ionospheric monitoring, and determination of earth rotation parameters will be analyzed in detail in the following part.
4.1. LeGNSS constellation design
LEO satellites cover only one-tenth of the Earth’s surface area compares to the current MEO navigation satellites due to their low altitude (Enge et al. Citation2012). Studies showed that the Earth’s surface covered by about 10 MEO satellites would require the deployment of nearly 100 LEO satellites (Chobotov Citation2002). As shown in , there will be tens of thousands of LEO satellites deployed in the future. How to deploy these LEO satellite constellations and maximize their positioning efficiency is the primary work of LeGNSS construction. At present, there have been some articles for studying the design of LEO satellite constellation, which are based on simple indicators, such as the number of visible satellites, DOP values, etc. (He and Hugentobler Citation2018; Zhang et al. Citation2018; Ma et al. Citation2020; Han et al. Citation2021). The optimization design of the LEO constellation by Ge et al. (Citation2020b) applies the indicators of not only the visible number, availability and DOP values, but also the PPP convergence time. shows the configuration of different LEO constellations. shows the visible number of LEO satellites, availability of LEO constellations, and the distribution of GDOP values along the latitude before and after the optimization of LEO constellations with 120, 150, 180, and 240 LEO satellites, respectively.
Figure 2. Distribution of the visible number, availability of LEO satellites, and GDOP values along the latitude direction before (left) and after (right) the optimization of LEO constellations with 120, 150, 180, and 240 LEO satellites, respectively.
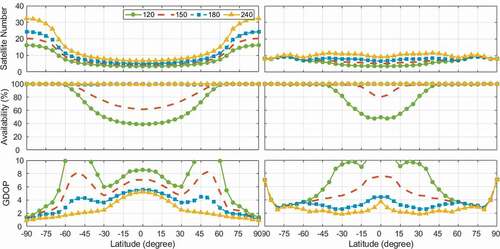
Table 2. LEO satellite constellation design configuration (w/o means constellation without optimization; w means constellation with optimization, i denotes orbit inclination, t denotes number of satellites in Walker constellation, p denotes the number of equally spaced orbit planes, and f denotes the relative spacing between satellites in adjacent orbit planes)
As shown in , with the same number of LEO satellites, the global visible satellite number, availability and GDOP value of the optimized LEO satellite constellation are distributed relatively uniformly around the world. With different LEO constellation combinations, the observable satellite number at different latitudes become more equal though the average number of satellites observed for 120 satellites at low latitudes is still less than 4. For the 180 and 240 LEO satellites cases, the average number of observable satellites is 8–10 around the world which is nearly the same as each GNSS constellation. The availability with 120 and 150 LEO satellites with different constellation combinations improved greatly at mid-latitude regions compared to the single constellation. However, at low-latitude areas, the availability still cannot reach 100% because the number of LEO satellites is not large enough. In order to get an equal global distribution of LEO satellites, 60 satellites are deployed as polar orbits as the basic constellation and others are deployed at 60° and 35° inclinations to have a better coverage for mid- and low-latitude regions. The GDOP values with 180 and 240 LEO satellites cases are much more stable along the latitudes, especially in mid- and low-latitude regions.
However, there are some contradictions between the optimization of LEO satellite constellation and the practical engineering applications. Firstly, the number of LEO satellites is bound to be closely related to national strategic needs. Secondly, the objective factors such as launch cost, actual space environment and maneuverability should be taken into consideration when determining the orbital altitude, number of orbital planes and orbital inclination of LEO satellite constellations. Last but not least, LEO constellations could be multifunctional in the future, such as communication and navigation combination, of which the constellation design is different from each other. How to design such hybrid LEO constellation is also an important issue. Therefore, when we optimize LEO satellite constellations in the future, optimization theory and engineering applications should be taken into consideration to achieve the optimal design of LEO satellite constellations.
4.2. Precise orbit and clock determination
Precise orbit and clock products are the primary prerequisites for precise applications. The traditional method to determine the orbit and clock of navigation satellite is to conduct precise orbit and clock estimation by using pseudorange and carrier phase observations received by global monitoring stations with uniform distribution. While the precise orbit of LEO satellites is generally obtained by using on-board GNSS observation data with fixed GNSS precise orbit and clock products. It is inevitable that the errors of GNSS orbit and clock will be introduced into LEO orbit and clock (Zhu, Reigber, and König Citation2004). For LeGNSS, it includes not only the original GNSS navigation satellites, but also hundreds of LEO satellites that are capable of transmitting navigation signals. This section mainly introduces the advantages and challenges of LeGNSS system in precise orbit and clock determination.
4.2.1. Opportunities
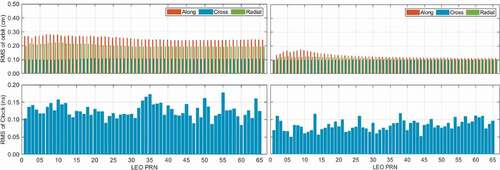
The benefits of LEO on-board GNSS observations for GNSS precise orbit determination have been studied since 1995 (Rim et al. Citation1995; Geng et al. Citation2007; Kuang, Liu, and Zhao Citation2009; Zhao et al. Citation2017). As the moving tracking stations in space, the geometry for GNSS POD can be extraordinarily strengthened, which can improve the accuracy of GNSS orbit with fewer ground stations (Geng et al. Citation2008). However, the above researches are all based on one or very few LEO satellites. There are few systematic studies on the orbit and clock determination for LeGNSS, especially for the orbit and clock determination of LEO satellites. Ge et al. (Citation2017) and Li et al. (Citation2019) have obtained preliminary results on the advantages of LeGNSS system in precise orbit and clock determination for GNSS and LEO satellites. They proposed the conception of the future LeGNSS and evaluated four schemes of LeGNSS orbit and clock determination. The motivation of designing four schemes is to reduce the computation burden for complete integrating a huge number of LEO satellites with GNSS, which is based on the fact that a certain number of LEO satellites can already improve the precision of GNSS orbits significantly, especially for BDS GEO and IGSO satellites. Ge et al. (Citation2017) and Li et al. (Citation2017) investigated how to choose an appropriate number of LEO satellites to improve GNSS and LEO orbits. The results show that a certain number of LEO satellites is enough to improve the precision of GNSS orbits and clock products considering the computational burden. As shown in , certain number of LEO satellites are employed (six LEO satellites were chosen as described in Ge et al. (Citation2017) together with GNSS satellites to enhance the orbit and clock determination of MEO and GEO satellites. To further improve the clock and orbit solution of LEO satellites, the ground-tracked LEO satellite data can be further introduced as shown in .
Figure 3. GPS/BDS navigation satellite orbit and clock results without (left) and with (right) partial LEO satellites.

Figure 4. LEO orbit and clock determination without (left) and with (right) ground LEO observations.
4.2.2. Challenges
The aforementioned strategies can be completely achieved in the post-processing. However, in order to achieve real time precise applications, there are still many challenges in real time precise orbit and clock determination for LeGNSS. To obtain the real time precise orbits and clocks, it needs the highly efficient determination algorithm or the effective prediction for a certain time. A typical example is the real time orbit and clock determination of the current GNSS. With the refinement of force models for the current GNSS satellites (Arnold et al. Citation2015; Montenbruck, Steigenberger, and Hugentobler Citation2015; Guo et al. Citation2017), the predicted precision of GNSS orbit within a few hours can still achieve centimeter level, which means that the precision of forecast orbit is enough for real time navigation and positioning. However, the precision of predicted GNSS clock for hours cannot meet the requirement for real time precise applications, such as real time PPP. Thus, real time clock estimation has to be conducted though it suffers computational burden (Ge et al. Citation2012; Laurichesse et al. Citation2013; Fu et al. Citation2019).
How to obtain precise real time LEO orbit and clock products is the most important issue to successfully adopt LeGNSS system. It is well known that the forces of LEO satellites are more complex than those of GNSS satellites. Empirical force parameters are needed to absorb the unmodeled part of the force models when conducting precise LEO orbit determination. However, these parameters cannot be precisely forecast, which leads to the challenge of high precision and long arc prediction for LEO satellites (Wang et al. Citation2016). Li et al. (Citation2019c) used the stored real time GNSS orbit and clock products to perform simulated real time orbit determination of LEO satellites. The results show that centimeter level can be achieved for real time kinematic orbit determination. Nevertheless, the quality of real-time GNSS orbit and clock products obtained by LEO satellites should be further confirmed as well as the feasibility of onboard precise orbit determination with a kinematic method. Ge et al. (Ge, et al., Citation2020a) studied the real time precise orbit integration method of LEO satellites by using only accelerometer data. The orbit precision can also reach centimeter level. For real time LEO clock estimation, it is unrealistic to use the atomic clock for each LEO satellite, considering the launch cost and number of LEO satellites. Then the clock of LEO satellites cannot be forecasted for a long time with high precision (Wu et al. Citation2020; Wang and EI-Mowafy Citation2021), which means that we can only use the efficient calculation method. On the one hand, the estimation of real time clock of LEO satellites can imitate the current method for real time GNSS clock estimation. In this way, real time observation of LEO satellite received by global ground stations should be used and sequential least squares or square-root filtering algorithm can be adopted to calculate real time clock of LEO satellites. On the other hand, the clock offset of each LEO satellite can be estimated by itself using onboard observations from current GNSS satellites if onboard receiver and transmitter share the same reference frequency. The challenge of this method is the stability of hardware delay between the onboard receiver and the transmitter. Apart from the precision of orbit and clock of LEO satellites, the way of how to broadcast the real time LEO orbit and clock to the users is another important issue which needs to be taken into consideration.
4.3. Precise Point Positioning (PPP)
Currently, Real-Time Kinematic (RTK), Network RTK (NRTK or PPP-RTK) technologies are commonly used for GNSS real time precise positioning. Reference stations with appropriate density are required for NRTK and PPP-RTK to get precise atmospheric corrections (Wübbena et al. Citation1996). PPP technology can be used for precise positioning if reference stations cannot be established (Zumberge et al. Citation1997). However, PPP needs a long convergence time to achieve centimeter-level precision. As a result, PPP ambiguity fixing and multisystem GNSS fusion have been extensively studied (Ge et al. Citation2008; Li et al. Citation2015) in order to reduce PPP convergence time. However, due to the lack of precise atmospheric corrections, the convergence time of traditional PPP still takes 10 min or even more (Li et al. Citation2015). If dozens or even hundreds of LEO satellites can transmit L-band navigation signals to the ground in the future, fast convergent PPP can be achieved due to the rapid geometric change with respect to the user station. This section mainly discusses the advantages and challenges of LeGNSS system for PPP. The convergence time of the positioning solution is defined as the time required for the positioning error of each component to reach ±10 cm and stay within this value for more than 10 min.
4.3.1. Opportunities
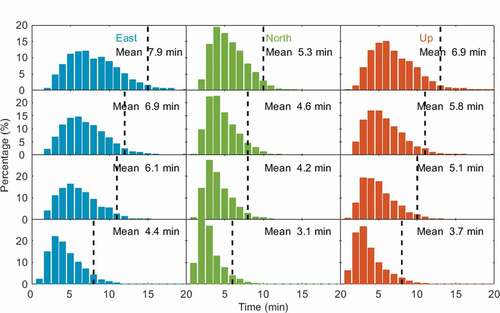
Ke et al. (Citation2015) conducted a preliminary numerical analysis of PPP using simulated GPS and LEO satellite data. The results showed that the convergence time was significantly accelerated after the employment of LEO satellite navigation signals. Ge et al. (Citation2018) simulated 66 LEO satellites and the corresponding GPS/BDS observation data. Then LEO enhanced GPS/BDS PPP was carried out. On the one hand, the results showed that after adding LEO satellites to the GPS/BDS satellite system, the PPP initialization time can reach to about 5 min in most parts of the world. On the other hand, due to the high speed of LEO satellites, large geometric configuration changes can happen in a short time. Thus, the sampling interval of observation data will also have a great impact on the convergence time. The results showed that the 1 s sampling interval can further shorten the convergence time compared to the 30-s sampling interval, as shown in .
Figure 5. Comparison of GPS/BDS/LEO PPP east/north/up convergence time under different sampling intervals with 66 LEO satellites. The black dashed line represents the 95% global station convergence time (from top to bottom is 30 s, 10 s, 5 s, and 1 s, respectively).
Because of the polar orbit and the small coverage of LEO satellites, it is difficult to provide real time precise position and navigation services in low- and mid-latitude regions. On this basis, Ge et al. (Citation2020b) optimized the design of the LEO satellite constellation, as described in Sect. 4.1. A statistical analysis of PPP convergence time and accuracy of global stations was made before and after constellation optimization. shows the statistics of the average convergence time of the high-, middle-, and low-latitude regions on horizontal and vertical directions before and after optimization. LEO orbit configurations are shown in .
Figure 6. Vertical (top) and horizontal (bottom) convergence time comparison of high-latitude (left), mid-latitude (middle), and low-latitude (right) stations before and after LEO satellite constellation optimization with 120, 150, 180, and 240 LEO satellites (Ge et al. Citation2020b).
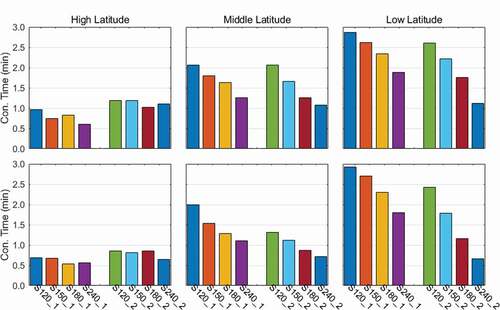
From , it can be seen that for a single LEO constellation, the convergence time of vertical and horizontal components in the high latitude region is shorter than 1 min. For different inclination combinations of LEO constellations, the convergence time of vertical and horizontal components in high latitudes is still about 1 min. In low- and mid-latitude regions, as the number of LEO satellites in single constellation increases and the number of LEO satellites in multi-constellation increases, the convergence time of vertical and horizontal components is significantly shortened. In addition, the convergence time of different constellation combinations is shorter than that of a single constellation. The convergence time of the horizontal component in the mid-latitude area is longer than 1 min in case of a single constellation of 180 and 240 satellites, while shorter than 1 min in case of different constellation combinations. This trend is more pronounced in low-latitude regions. For the horizontal component, the convergence time of 240 LEO satellites exceeds 1.5 min in case of a single constellation, while the convergence time of the combination of three constellations with different orbit inclination is about 40 s. Using 240 LEO satellites, combined with different LEO constellations, convergence within 1 min can be achieved. Other researchers have also obtained basically the same results as the author of this article (Su Citation2017; Li et al. Citation2019b).
Based on the aforementioned research results, it can be seen that the trajectory of the LEO satellite in LeGNSS system passed per unit time is longer than that of GNSS, which means the great change of elevation and azimuth angle. This leads to the weaker correlation between epochs in the positioning process, resulting in the enhancement of the estimation model. It is expected to fundamentally solve the problems of slow convergence of PPP without any augmentation.
4.3.2. Challenges
However, LeGNSS PPP also has some challenges. First of all, LeGNSS PPP requires precise orbit and clock products, especially for precise LEO orbit and clock products. The above-mentioned research on LeGNSS PPP is based on simulated observation data. Moreover, they are mostly based on the assumption that there is no error in LEO satellite orbit and clock products, which makes the convergence time relatively optimistic. Therefore, it is necessary to further study the impact of precision of LEO satellite orbit and clock on LeGNSS PPP. In addition, due to the low orbital height and high speed of LEO satellites, the visible arc of the ground station is about 10–15 min, such frequent satellite changes may produce more cycle slips. Moreover, the rapid geometric change also makes the ionosphere error change greatly between epochs. Thus, traditional methods for detecting cycle slips, such as the ionospheric residual method, may not be suitable for LEO navigation satellite observation data processing and more effective data preprocessing methods need to be studied. In terms of positioning model theory, the above-mentioned studies are all based on ionospheric-free combination. Further research is needed on the positioning effect of undifferenced-uncombined and ionospheric-weighted model in LeGNSS PPP. In addition, some researchers used simulation data to study the ambiguity fixing of LEO satellites in LeGNSS PPP and its influence on GNSS ambiguity fixing. The results show that the introduction of 60, 192, and 288 LEO satellites can reduce the Time To First Fix (TTFF) of the four-system GNSS fixed solution from 7.1 min to 4.8, 1.1, and 0.7 min, respectively, and the corresponding positioning accuracy is also improved about 60%, 80%, and 90% (Li et al. Citation2019a). It is worthy of further study on how the ambiguities affect the convergence and how the GNSS ambiguities changed when employing LEO satellites.
In summary, LeGNSS PPP is significantly dependent on the quality of the LEO satellite orbit and clock products. There are still potential challenges in detection of the cycle slips, investigation on positioning model and the ambiguity fixing for LeGNSS PPP.
4.4. Global ionosphere monitoring
Ionospheric delay is one of the most important issues in precise positioning. Ground-based GNSS observation data are usually used for the Global Ionosphere Model (GIM), with an average accuracy of 2–8 TECU (total electron content unit) under the different solar conditions around the world (Hernández-Pajares et al. Citation2017). The recruit of LEO navigation satellites to the current GNSS provides more observations for space weather monitoring and brings new opportunities and challenges for space weather monitoring. The advantages and challenges of LeGNSS in global ionospheric modeling in the future will be mainly introduced in this section.
4.4.1. Opportunities
In the past 20 years, with the rapid development of global GNSS, the accuracy and reliability of GIM has been greatly improved (Hernández-Pajares et al. Citation2009; Roma-Dollase et al. Citation2018). However, the accuracy of the GIM still needs improving, especially in the area without GNSS stations (such as ocean, polar regions, etc.). LeGNSS can solve this problem to a large extent. There are hundreds of LEO satellites with different orbital inclinations in LeGNSS, which cannot only receive the signals from MEO satellites, but also transmit the navigation signals to the earth. Therefore, LEO navigation constellation can fill the gaps of the ocean and polar region and further improve the precision and reliability of the global ionosphere map.
On the other hand, a large number of LEO satellites also bring opportunities for Global Topside Ionospheric Map (GTIM). The topside ionosphere is of great significance for studying the space-time characteristics of ionospheric plasma regions and determining the orbits of LEO satellites. Currently, two methods are commonly used to describe the topside ionosphere. One is the empirical model, which is fitted by simple mathematical functions and appropriate indicators based on measurements, including the International Reference Ionospheric (IRI) model (Bilitza et al. Citation2017) and the NeQuick model (Nava, Coisson, and Radicella Citation2008). The disadvantage of these empirical models is that they cannot represent the actual instantaneous changes for the ionosphere. The other is a theoretical model, which mainly involves the modeling of physical and chemical processes (Singh and Horwitz Citation1992). The disadvantage of this model is the high computational burden. Moreover, its accuracy depends on a large amount of magnetospheric data which is usually difficult to obtain, such as electric field measurements. With the rapid development of LEO satellites, a large number of onboard GNSS observations are helpful for precise modeling of the global topside ionosphere (Zhang and Tang Citation2014; Chen et al. Citation2017; Ren et al. Citation2020). Ren et al. (Citation2020) proposed a method to generate GTIM using onboard dual-frequency GPS observation data from 13 LEO satellites at different orbital altitudes. This method first uses an empirical model to normalize the LEO observation data to the same observation range. Then observations of LEO satellites with different orbit heights are used to perform GTIM modeling, which provides a reference for the calculation of GTIM from onboard observations at different orbital altitudes.
4.4.2. Challenges
Although LEO satellites have advantages in global (topside) ionosphere modeling, there are potential challenges as well. The onboard receiver of LEO satellite receives the signal of the MEO navigation satellites from above, and broadcasts the signal of the navigation satellite downward. How to effectively integrate upward and downward observations and simultaneously solve the global ionospheric model? The normalization method with empirical model has achieved good results in global topside ionospheric modeling (Ren et al. Citation2020). However, it may not be effective in global ionospheric modeling. The main reasons are as following: In the global topside ionospheric modeling, the normalized values are calculated from the observations of onboard LEO satellites on different orbits, and these observations are all upward observations. If onboard GNSS observations are used for global ionospheric modeling, it is necessary to normalize the upward ionospheric observations to the ground. It is difficult to evaluate the errors introduced by normalization. Therefore, it is necessary to deeply investigate and analyze how to use LEO satellite constellations to improve the accuracy of global ionospheric modeling, especially in oceans and polar regions.
4.5 Determination of earth reference frame
The earth reference frame is affected by solid earth tide, ocean tide, material changes of the earth and so on. LEO satellites have low orbital height and are more affected by the distribution of earth mass than medium and high orbit navigation satellites. Thus, it is of great importance to study the influence of LEO satellites on the determination of earth reference frame. This section mainly discusses the advantages and challenges of the future LeGNSS system for the determination of earth reference frame.
4.5.1. Opportunities
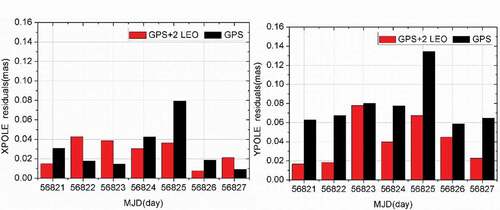
The determination of the reference frame of the earth usually adopts the joint processing of Very Long Baseline Interference (VLBI), Satellite Laser Ranging (SLR), Doppler Orbitography and Radio-positioning Integrated by Satellite (DORIS), and GNSS techniques. LEO satellites have already been employed to study the geocentre variation (Männel and Rothacher Citation2017). In the future, the introduction of many LEO satellites will have great potential to improve the determination of the reference frame, such as Earth Rotation Parameters (ERP). shows the results of using two GRACE satellites and ground stations to simultaneously estimate ERP. It can be clearly seen that in most cases, the accuracy of ERP can be greatly improved with a combined solution. Overall, the accuracy of ERP can be averagely improved by 10%. However, in some cases, the accuracy of xpole component degrades after adding LEO satellites. The reason should be investigated in the future.
Figure 7. The influence of LEO satellites on the calculation of the earth’s rotation parameters.
Zhu, Reigber, and König (Citation2004) jointly processed various types of data in high-, middle- and low-orbits (spaceborne GNSS observations, ground GNSS observations, SLR observation data, K-band observation data, etc.). The results show that the joint processing of multi-source data by one-step method can effectively improve the accuracy of various parameters (GPS orbit, LEO satellite orbit, ground coordinates). In addition, Huang et al. (Citation2020) used LEO satellites to determine the PCO of GPS satellites as well as the earth-scale parameter. The results of this method are similar to the use of fixed Galileo satellite PCO to determine the GPS satellite PCO and earth-scale parameter. It further explains the important role of LEO satellites in the realization of the earth reference system.
4.5.2. Challenges
The above results show that the joint estimation of satellite orbits, ground coordinates, and earth rotation parameters by combining various observations is beneficial to improve the accuracy of all the parameters. However, it is necessary to analyze the contribution of each kind of observation data, such as ground GNSS data, onboard GNSS data, and ground LEO data, to the solutions of the geocentric reference frame, orbit determination, and positioning. Moreover, it is necessary to quantitatively study the contribution of LEO satellite data with different orbital heights and different orbital inclinations to the aforementioned solutions.
5. Summary and prospect
The article describes the opportunities and challenges brought by the LeGNSS. The main advantages of LeGNSS are concluded as follows.
LEO satellites can be used as space-based monitor stations. The orbit and clock products of current GNSS satellites can be improved greatly with involved onboard observations, especially for GEO and IGSO satellites.
Thanks to the fast geometric change brought by LEO satellites, it is expected to fundamentally solve the problem of the long convergence time of PPP without any augmentation.
Such a large number of LEO satellites could improve the spatial and time resolution of atmospheric monitoring, especially for ionosphere. It is worthy to further investigate the refined atmosphere model with data from LEO constellations at different altitudes.
The fusion of various observation data, such as onboard GNSS data, ground GNSS data, and ground LEO data, helps to improve the precision of ERP.
On the other hand, there are potential challenges in LeGNSS for precise real time applications. The reasonable design of LEO satellite constellation is one of the most important issues needs to be settled. Moreover, real-time precise orbit and clock products of LEO satellites is the fundamental problem, which is the most critical issue that needs to be solved in the future. At last but not least, optimizing the integration of various types of data will also be the research topic for LeGNSS.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Data availability statement
Raw data were generated at Tongji University. Derived data supporting the findings of this study are available at https://gnss.tongji.edu.cn/info/1023/1447.htm or from the corresponding author [email protected].
Additional information
Funding
Notes on contributors
Haibo Ge
Haibo Ge received his PhD degree at Tongji University. Now he is an assistant professor at college of surveying and geo-informatics, Tongji University. His research interests are orbit determination for high-, medium-, and low-orbit satellites and LEO-enhanced GNSS applications.
Bofeng Li
Bofeng Li obtained his B.Sc. and PhD both from and is now a Professor in Geodesy at Tongji University. He was appointed by ‘Young 1000-Talent’ program in 2013. His research interests include GNSS ambiguity resolution, precise orbit determination, real-time precise positioning as well as the mathematical Geodesy.
Song Jia
Song Jia is now a PhD student at Tongji University. Her researches mainly concentrate on earth rotation parameters determined from a combined processing of LEO- and ground-based GNSS observations.
Liangwei Nie
Liangwei Nie is now a PhD student in Geodesy at Technical University of Berlin. His research interests include precise orbit determination and precise clock estimation.
Tianhao Wu
Tianhao Wu is now a PhD student of Tongji University. His major research interest is precise orbit determination of LEO and GNSS satellites.
Zhe Yang
Zhe Yang obtained her PhD degree from The Hong Kong Polytechnic University in 2018, with dissertation research focusing on equatorial ionospheric plasma irregularities and associated scintillations of GNSS signals. She is now working as an Assistant Professor at College of Surveying and Geo-informatics, Tongji University. Her research interests are mainly in ionosphere remote sensing using multi-GNSS signals and ionospheric space weather impacts on GNSS.
Jingzhe Shang
Jingzhe Shang is now a Master student at Tongji University. His researches mainly concentrate on GNSS-based and LeGNSS-based global ionosphere modeling.
Yanning Zheng
Yanning Zheng is now a PhD student at Tongji University. His research interests include PPP, PPP-RTK, and LeGNSS.
Maorong Ge
Maorong Ge received his PhD degree in Geodesy at Wuhan University. He is now a professor at Technical University of Berlin and head of the GNSS real-time software group at the German Research Centre for Geosciences. His research interests are GNSS algorithms and software development.
References
- Arnold, D., M. Meindl, G. Beutler, R. Dach, S. Schaer, S. Lutz, L. Prange, K. Sosnica, L. Mervart, and A. Jäggi. 2015. “CODE’s New Solar Radiation Pressure Model for GNSS Orbit Determination.” Journal of Geodesy 89 (8): 775–791. doi:https://doi.org/10.1007/s00190-015-0814-4.
- Bilitza, D., D. Altadill, V. Truhlik, V. Shubin, I. Galkin, B. Reinisch, and X. Huang. 2017. “International Reference Ionosphere 2016: From Ionospheric Climate to Real‐time Weather Predictions.” Space Weather 15 (2): 418–429. doi:https://doi.org/10.1002/2016SW001593.
- Black, H. D. 1990. “Early Development of Transit, the Navy Navigation Satellite System.” Journal of Guidance, Control, and Dynamics 13 (4): 577–585. doi:https://doi.org/10.2514/3.25373.
- Chen, P., Y. Yao, Q. Li, and W. Yao. 2017. “Modeling the Plasmasphere Based on LEO Satellites Onboard GPS Measurements.” Journal of Geophysical Research: Space Physics 122 (1): 1221–1233.
- Chobotov, V. A. 2002. Orbital Mechanics. Reston, VA: American Institute of Aeronautics and Astronautics.
- CNAGA (China National Administration of GNSS and Applications). 2017. “CASIC Plans to Launch 156 Small Satellites for the Hongyun Program.” Accessed 3 March 2021. http://en.beidouchina.org.cn/c/393.html
- Commodore, N. B. A. 2012. “A Brief History of Global Navigation Satellite Systems.” The Journal of Navigation 65 (1): 1. doi:https://doi.org/10.1017/S0373463311000506.
- Dietrich, F. J., P. Metzen, and P. Monte. 1998. “The Globalstar Cellular Satellite System.” IEEE Transactions on Antennas and Propagation 46 (6): 935–942. doi:https://doi.org/10.1109/8.686783.
- Enge, P., B. Ferrell, J. Bennett, D. Whelan, G. Gutt, and D. Lawrence. 2012. “Orbital Diversity for Satellite Navigation.” In Proceeding: ION GNSS 2012, 3834–3846. Nashville, TN, September 17–21.
- Fossa, C. E., R. A. Raines, G. H. Gunsch, and M. A. Temple. 1998. “An Overview of the IRIDIUM (R) Low Earth Orbit (LEO) Satellite System.” In Proceeding: IEEE 1998 National Aerospace and Electronics Conference. NAECON 1998. Celebrating 50 Years (Cat. No. 98CH36185) July 17 Dayton, Ohio, USA, 152–159.
- Fu, W., G. Huang, Q. Zhang, S. Gu, M. Ge, and H. Schuh. 2019. “Multi-GNSS Real-time Clock Estimation Using Sequential Least Square Adjustment with Online Quality Control.” Journal of Geodesy 93 (7): 963–976. doi:https://doi.org/10.1007/s00190-018-1218-z.
- Ge, H., B. Li, L. Nie, M. Ge, and H. Schuh. 2020a. “Improving Low Earth Orbit (LEO) Prediction with Accelerometer Data.” Remote Sensing 12: 1599. doi:https://doi.org/10.3390/rs12101599.
- Ge, H., B. Li, L. Nie, M. Ge, and H. Schuh. 2020b. “LEO Constellation Optimization for LEO Enhanced Global Navigation Satellite System (Legnss).” Advances in Space Research 66 (3): 520–532. doi:https://doi.org/10.1016/j.asr.2020.04.031.
- Ge, H., B. Li, M. Ge, N. Zang, L. Nie, Y. Shen, and H. Schuh. 2018. “Initial Assessment of Precise Point Positioning with LEO Enhanced Global Navigation Satellite Systems (Legnss).” Remote Sensing 10 (7): 984. doi:https://doi.org/10.3390/rs10070984.
- Ge, H., B. Li, M. Ge, Y. Shen, L. Nie, and H. Schuh. 2017 “Combined Precise Orbit Determination for High-, Medium-, and Low-Orbit Navigation Satellites.” In China Satellite Navigation Conference, 165–180. Shanghai, China, May 23–25.
- Ge, M., G. Gendt, M. A. Rothacher, C. Shi, and J. Liu. 2008. “Resolution of GPS Carrier-phase Ambiguities in Precise Point Positioning (PPP) with Daily Observations.” Journal of Geodesy 82 (7): 389–399. doi:https://doi.org/10.1007/s00190-007-0187-4.
- Ge, M., J. Chen, J. Douša, G. Gendt, and J. Wickert. 2012. “A Computationally Efficient Approach for Estimating High-rate Satellite Clock Corrections in Real Time.” GPS Solutions 16 (1): 9–17. doi:https://doi.org/10.1007/s10291-011-0206-z.
- Geng, J., C. Shi, Q. Zhao, and J. Liu. 2007. “GPS Precision Orbit Determination from Combined Ground and Space-borne Data.” Geomatics and Information Science of Wuhan University 32 (10) : 906–909.
- Geng, J., C. Shi, Q. Zhao, M. Ge, and J. Liu. 2008. “Integrated Adjustment of LEO and GPS in Precision Orbit Determination.” VI Hotine-Marussi Symposium on Theoretical and Computational Geodesy May 29–June 2 Wuhan, China, 133–137.
- Günther, C. 2018. “Kepler–satellite Navigation without Clocks and Ground Infrastructure.” In: Proceeding of ION GNSS+ 2018, 849–856. Miami, FL, September 24–28.
- Guo, J., G. Chen, Q. Zhao, J. Liu, and X. Liu. 2017. “Comparison of Solar Radiation Pressure Models for BDS IGSO and MEO Satellites with Emphasis on Improving Orbit Quality.” GPS Solutions 21 (2): 511–522. doi:https://doi.org/10.1007/s10291-016-0540-2.
- Han, Y., L. Wang, W. Fu, H. Zhou, T. Li, B. Xu, and R. Chen. 2021. “LEO Navigation Augmentation Constellation Design with the Multi Objective Optimization Approaches.” Chinese Journal of Aeronautics 34: 265–278. doi:https://doi.org/10.1016/j.cja.2020.09.005.
- Harebottle, A. 2018. “Comtech, Kepler to Drive Rapidly Deployable LEO Comms.” Via satellite. Accessed 6 June 2021. https://www.satellitetoday.com/telecom/2018/06/06/comtech-kepler-to-drive-rapidly-deployable-leo-comms/
- He, X., and U. Hugentobler 2018. “Design of Mega-constellations of LEO Satellites for Positioning.” In: China Satellite Navigation Conference, 663–673. Har bin, China: Springer, May 23–25.
- Henry, C. 2018. “LeoSat Gains Hispasat as Second Investor, Drops Demo Satellite Plans.” SpaceNews. Accessed 10 July 2021. https://spacenews.com/leosat-gains-hispasat-as-second-investor-drops-demo-satellite-plans/
- Hernández-Pajares, M., D. Roma-Dollase, A. Krankowski, A. García-Rigo, and R. Orús-Pérez. 2017. “Methodology and Consistency of Slant and Vertical Assessments for Ionospheric Electron Content Models.” Journal of Geodesy 91 (12): 1405–1414. doi:https://doi.org/10.1007/s00190-017-1032-z.
- Hernández-Pajares, M., J. M. Juan, J. Sanz, R. Orus, A. Garcia-Rigo, J. Feltens, A. Komjathy, S. C. Schaer, and A. Krankowski. 2009. “The IGS VTEC Maps: A Reliable Source of Ionospheric Information since 1998.” Journal of Geodesy 83 (3–4): 263–275. doi:https://doi.org/10.1007/s00190-008-0266-1.
- Hill, J. 2020. “Maxar Stock Surges on Strong 2Q, Executives Update Legion, Telesat LEO Outlook.” Via Satellite. Accessed July 2021. https://www.satellitetoday.com/business/2020/08/06/maxar-stock-surges-on-strong-2q-executives-update-legion-telesat-leo-outlook/
- Huang, W., B. Männel, A. Brack, and H. Schuh. 2020. “Two Methods to Determine Scale-independent GPS PCOs and GNSS-based Terrestrial Scale: Comparison and Cross-check.” GPS Solutions 25 (1). doi:https://doi.org/10.1007/s10291-020-01035-5.
- Jewett, R. 2020. “FCC Grants OneWeb Market Access for 2,000-Satellite Constellation.” Via Satellite. Accessed 10 July 2021. https://www.satellitetoday.com/broadband/2020/08/26/fcc-grants-oneweb-market-access-for-2000-satellite-constellation/
- Joerger, M., L. Gratton, B. Pervan, and C. E. Cohen. 2010. “Analysis of Iridium‐augmented GPS for Floating Carrier Phase Positioning.” Navigation 57 (2): 137–160. doi:https://doi.org/10.1002/j.2161-4296.2010.tb01773.x.
- Kbidy, G., G. Adamski, and N. May. 2018. “Design Concepts and Challenges for the Iridium NEXT Command and Control System.” In 2018 Space Operations Conference, 2708. Marseille, France, May 28–June 1.
- Ke, M., J. Lv, J. Chang, W. Dai, K. Tong, and M. Zhu. 2015. “Integrating GPS and LEO to Accelerate Convergence Time of Precise Point Positioning.” In 2015 International Conference on Wireless Communications & Signal Processing (WCSP), 1–5. Nanjing, China, October 15–17.
- Kuang, C., J. Liu, and Q. Zhao. 2009. “Precise Orbit Determination of Low Earth Orbit Satellite and GPS Satellite Based on Combined Orbit Determination Strategy.” Journal of Geodesy and Geodynamics 29 (2): 121–125.
- Laurichesse, D., L. Cerri, J. P. Berthias, and F. Mercier. 2013. “Real Time Precise GPS Constellation and Clocks Estimation by Means of a Kalman Filter.” In Proceeding: ION GNSS+ 2013, 1155–1163. Nashville, TN, September 16–20.
- Li, B., H. Ge, M. Ge, L. Nie, Y. Shen, and H. Schuh. 2019. “LEO Enhanced Global Navigation Satellite System (Legnss) for Real-time Precise Positioning Services.” Advances in Space Research 63 (1): 73–93. doi:https://doi.org/10.1016/j.asr.2018.08.017.
- Li, B., L. Nie, H. Ge, M. Ge, and L. Yang. 2017. “Precise Orbit Determination of Combined GNSS and LEO Constellations with Regional Ground Stations.” In Proceedings of ION GNSS+ 2017, 2137–2147. Portland, Oregon, September 25–29
- Li, X., F. Ma, X. Li, H. Lv, L. Bian, Z. Jiang, and X. Zhang. 2019b. “LEO Constellation-augmented multi-GNSS for Rapid PPP Convergence.” Journal of Geodesy 93 (5): 749–764. doi:https://doi.org/10.1007/s00190-018-1195-2.
- Li, X., J. Wu, K. Zhang, X. Li, Y. Xiong, and Q. Zhang. 2019c. “Real-Time Kinematic Precise Orbit Determination for LEO Satellites Using Zero-differenced Ambiguity Resolution.” Remote Sensing 11 (23): 2815. doi:https://doi.org/10.3390/rs11232815.
- Li, X., M. Ge, X. Dai, X. Ren, M. Fritsche, J. Wickert, and H. Schuh. 2015. “Accuracy and Reliability of multi-GNSS Real-time Precise Positioning: GPS, GLONASS, BeiDou, and Galileo.” Journal of Geodesy 89 (6): 607–635. doi:https://doi.org/10.1007/s00190-015-0802-8.
- Li, X., X. Li, F. Ma, Y. Yuan, K. Zhang, F. Zhou, and X. Zhang. 2019a. “Improved PPP Ambiguity Resolution with the Assistance of Multiple LEO Constellations and Signals.” Remote Sensing 11 (4): 408. doi:https://doi.org/10.3390/rs11040408.
- Lu, J., G. Zhang, G. Chen, W. Gao, and C. Su. 2020. “Development Status and Prospect of Satellite Navigation System.” Spacecraft Engineering 04: 1–10.
- Ma, F., X. Zhang, X. Li, J. Cheng, F. Guo, J. Hu, and L. Pan. 2020. “Hybrid Constellation Design Using a Genetic Algorithm for a LEO-based Navigation Augmentation System.” GPS Solutions 24 (2): 1–14. doi:https://doi.org/10.1007/s10291-020-00977-0.
- Magan, V. 2015. “Samsung Exec Envisions LEO Constellation for Satellite Internet Connectivity.” Via Satellite. Accessed 10 July 2021. https://www.satellitetoday.com/telecom/2015/08/18/samsung-exec-envisions-leo-constellation-for-satellite-internet-connectivity/
- Männel, B., and M. Rothacher. 2017. “Geocenter Variations Derived from a Combined Processing of LEO-and Ground-based GPS Observations.” Journal of Geodesy 91 (8): 933–944. doi:https://doi.org/10.1007/s00190-017-0997-y.
- McDowell, J. C. 2020. “The Low Earth Orbit Satellite Population and Impacts of the SpaceX Starlink Constellation.” The Astrophysical Journal Letters 892 (2): L36. doi:https://doi.org/10.3847/2041-8213/ab8016.
- Meng, Y., L. Bian, Y. Wang, T. Yan, W. Lei, M. He, and X. Li. 2018. “Global Navigation Augmentation System Based on Hongyan Satellite Constellation.” Space International 10: 20–27.
- Montenbruck, O., P. Steigenberger, and U. Hugentobler. 2015. “Enhanced Solar Radiation Pressure Modeling for Galileo Satellites.” Journal of Geodesy 89 (3): 283–297. doi:https://doi.org/10.1007/s00190-014-0774-0.
- Murphy, M. 2020. “Amazon Wins FCC Approval for $10 Billion Satellite Internet Project.” Market Watch. Accessed 10 July 2021. https://www.marketwatch.com/story/amazon-wins-fcc-approval-for-10-billion-satellite-internet-project-11596158006
- Nava, B., P. Coisson, and S. M. Radicella. 2008. “A New Version of the NeQuick Ionosphere Electron Density Model.” Journal of Atmospheric and Solar-Terrestrial Physics 70 (15): 1856–1862. doi:https://doi.org/10.1016/j.jastp.2008.01.015.
- Nyirady, A. 2019a. “Astrocast Signs Launch Agreement With D-Orbit.” Via Satellite. Accessed 10 July 2021. https://www.satellitetoday.com/launch/2019/10/30/astrocast-signs-launch-agreement-with-d-orbit/
- Nyirady, A. 2019b. “Astrome Launches ICO, Gearing up for LEO Constellation.” Via Satellite. Accessed 10 July 2021. https://www.satellitetoday.com/innovation/2019/08/15/astrome-launches-ico-gearing-up-for-leo-constellation/
- Reid, T. G., A. M. Neish, T. F. Walter, and P. K. Enge. 2016a. “Leveraging Commercial Broadband LEO Constellations for Navigation.” In: Proceedings of ION GNSS+ 2016, 2300–2314. Portland, OR, September 12–16
- Reid, T. G., T. Walter, P. K. Enge, and T. Sakai. 2016b. “Orbital Representations for the Next Generation of Satellite-based Augmentation Systems.” GPS Solutions 20 (4): 737–750. doi:https://doi.org/10.1007/s10291-015-0485-x.
- Ren, X., J. Chen, X. Zhang, M. Schmidt, X. Li, and J. Zhang. 2020. “Mapping Topside Ionospheric Vertical Electron Content from Multiple LEO Satellites at Different Orbital Altitudes.” Journal of Geodesy 94 (9): 1–17. doi:https://doi.org/10.1007/s00190-020-01415-2.
- Rim, H. J., B. E. Schutz, P. A. M. Abusali, and B. D. Tapley. 1995. “Effect of GPS Orbit Accuracy on GPS-determined Topex/Poseidon Orbit.” In Proceeding: ION GPS 1995, 613–617. Palm Springs, CA, September 12–15.
- Roma-Dollase, D., M. Hernández-Pajares, A. Krankowski, K. Kotulak, R. Ghoddousi-Fard, Y. Yuan, Z. Li, et al. 2018. “Consistency of Seven Different GNSS Global Ionospheric Mapping Techniques during One Solar Cycle.” Journal of Geodesy 92 (6): 691–706. DOI:https://doi.org/10.1007/s00190-017-1088-9.
- Selding, P. B. 2016. “Boeing Proposes Big Satellite Constellations in V- and C-bands.” SpaceNews. Accessed 10 July 2021. https://spacenews.com/boeing-proposes-big-satellite-constellations-in-v-and-c-bands/
- Singh, N., and J. L. Horwitz. 1992. “Plasmasphere Refilling: Recent Observations and Modeling.” Journal of Geophysical Research: Space Physics 97 (A2): 1049–1079. doi:https://doi.org/10.1029/91JA02602.
- Su, X. 2017. “Theory and Method Research for Global Real-time Centi-meter Level Navigation System Based on High, Medium and Low Orbit Satellites.” PhD diss., Wuhan University.
- Wang, K., and Ahmed EI-Mowafy. 2021. “LEO Satellite Clock Analysis and Prediction for Positioning Applications.” Geo-spatial Information Science: 1–20. doi:https://doi.org/10.1080/10095020.2021.1917310.
- Wang, L., D. Li, R. Chen, W. Fu, X. Shen, and H. Jiang. 2020. “Low Earth Orbiter (LEO) Navigation Augmentation: Opportunities and Challenges.” Chinese Journal of Engineering Science 22:144. doi:https://doi.org/10.15302/j-sscae-2020.02.018.
- Wang, L., R. Chen, B. Xu, X. Zhang, T. Li, and C. Wu. 2019. “The Challenges of LEO Based Navigation Augmentation System – Lessons Learned from Luojia-1A Satellite.” In Proceeding: China Satellite Navigation Conference (CSNC) 2019 Proceedings, 298–310. Beijing, China: Springer Singapore.
- Wang, L., R. Chen, D. Li, B. Yu, and C. Wu. 2018. “Quality Assessment of the LEO Navigation Augmentation Signals from Luojia-1A Satellite.” Geomatics and Information Science of Wuhan University 43: 2191–2196.
- Wang, Y., S. Zhong, H. Wang, and J. Ou. 2016. “Precision Analysis of LEO Satellite Orbit Prediction.” Acta Geodaetica et Cartographica Sinica 45 (9): 1035.
- Wu, C., Y. Shu, G. Wang, and S. Li. 2020. “Design and Performance Evaluation of Tianxiang-1 Navigation Enhancement Signal.” Radio Engineering 9: 748–753.
- Wübbena, G., A. Bagge, G. Seeber, V. Böder, and P. Hankemeier. 1996. “Reducing Distance Dependent Errors for Real-time Precise DGPS Applications by Establishing Reference Station Networks.” In Proceeding: ION GPS 1996, 1845–1852. Kansas City, MO, September 17–20.
- Zhang, C., J. Jin, L. Kuang, and J. Yan. 2018. “LEO Constellation Design Methodology for Observing Multi-targets.” Astrodynamics 2 (2): 121–131. doi:https://doi.org/10.1007/s42064-017-0015-4.
- Zhang, X., and L. Tang. 2014. “Daily Global Plasmaspheric Maps Derived from Cosmic GPS Observations.” IEEE Transactions on Geoscience and Remote Sensing 52 (10): 6040–6046. doi:https://doi.org/10.1109/TGRS.2013.2294641.
- Zhao, Q., C. Wang, J. Guo, G. Yang, M. Liao, H. Ma, and J. Liu. 2017. “Enhanced Orbit Determination for BeiDou Satellites with FengYun-3C Onboard GNSS Data.” GPS Solutions 21 (3): 1179–1190. doi:https://doi.org/10.1007/s10291-017-0604-y.
- Zhu, S., C. Reigber, and R. König. 2004. “Integrated Adjustment of CHAMP, GRACE, and GPS Data.” Journal of Geodesy 78 (1–2): 103–108. doi:https://doi.org/10.1007/s00190-004-0379-0.
- Zumberge, J. F., M. B. Heflin, D. C. Jefferson, M. M. Watkins, and F.H. Webb. 1997. “Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks.” Journal of Geophysical Research: Solid Earth 102 (B3): 5005–5017. doi:https://doi.org/10.1029/96JB03860.