
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Block Adjustment (BA) is one of the essential techniques for producing high-precision geospatial 3D data products with optical stereo satellite imagery. For block adjustment with few ground-control points or without ground control, the vertical error of the model is the decisive factor that constrains the accuracy of 3D data products. The elevation data obtained by spaceborne laser altimeter have the advantages of short update periods, high positioning precision, and low acquisition cost, providing sufficient data support for improving the elevation accuracy of stereo models through the combined BA. This paper proposes a geometric positioning model based on the integration of Optical Satellite Stereo Imagery (OSSI) and spaceborne laser altimeter data. Firstly, we elaborate the principle and necessity of this work through a literature review of existing methods. Then, the framework of our geo-positioning models. Secondly, four key technologies of the proposed model are expounded in order, including the acquisition and management of global Laser Control Points, the association of LCPs and OSSI, the block adjustment model combining LCPs with OSSI, and the accuracy estimation and quality control of the combined BA. Next, the combined BA experiment using Ziyuan-3 (ZY-3) OSSI and ICESat-2 laser data was carried out at the testing site in Shandong Province, China. Experimental results prove that our method can automatically select LCPs with high accuracy. The elevation deviation of the combined BA eventually achieved the Mean Error (ME) of 0.06 m and the Root Mean Square Error (RMSE) of 1.18 m, much lower than the ME of 13.20 m and the RMSE of 3.88 m before the block adjustment. A further research direction will be how to perform more adequate accuracy analysis and quality control using massive laser points as checkpoints.
1. Introduction
Satellite remote sensing is a pivotal technology for obtaining high-precision geospatial information. Benefiting from the era of big data, various fields, whether these be mapping and surveying, the Internet, national defense security, or public services, have shown urgent demand for satellite remote sensing techniques, especially for high-resolution satellite remote-sensing imagery products and services (Li, Ding, and Shao Citation2021). As one of the main approaches for acquiring high-resolution remote sensing imagery products, the stereo mapping of Optical Satellite Stereo Imagery (OSSI) has created significant social and economic value.
In the past decade, thanks to the development and application of spatial information technology (Jianya, Mi, and Bo Citation2017), optical stereo mapping satellites, such as Tianhui-1 (TH-1), Ziyuan-3 (ZY-3), and Gaofen-7 (GF-7), have been able to provide long-term and massive fundamental data support for the global and large-scale stereo mapping missions in China. In this day and age, one of the hot issues in the field is how to make complete use of the deluge of image resources to produce high-precision geographic information products.
Block Adjustment (BA) is the core section of large-scale stereo mapping. So far, research on stereo mapping technologies has faced two main bottlenecks: the BA’s efficiency, and the accuracy of Three-Dimensional (3D) products (Bo, Mi, and Yingdong Citation2017). Traditional techniques typically carry out block adjustment with high-precision Ground Control Points (GCPs) obtained from maps and field measurements such as Global Navigation Satellite System (GNSS) to guarantee the geometric accuracy of 3D products (Satirapod, Trisirisatayawong, and Homniam Citation2003; Kadota and Takagi Citation2002). However, for large-scale mapping projects, such as global stereo mapping, the production efficiency of BA with GCPs is greatly constrained by the wide existence of complicated terrains, making the manual acquisition of GCPs extremely difficult. Moreover, the time and economic costs that is required to gain global coverage of GCPs are too large, which makes the task quite unrealistic. In the face of this problem, Changru Liu et al. and Yuxuan Liu et al. have conducted BA with only a few GCPs in the geometric quality improvement experiments of ZY-3 and GF-7 images (Liu et al. Citation2018, Citation2021). On the other hand, with the development of spaceborne integrated sensor technology, the positioning accuracy of satellite Synthetic Aperture Radar (SAR) and laser altimetry data has promoted continuously. Therefore, it has become an inevitable trend in optical stereo mapping technology evolution that the BA technique has changed from “BA of OSSI with GCPs” to “BA integrating OSSI and multiple remote sensing data (such as SAR (Zhang et al. Citation2021; Chunquan et al. Citation2017) and laser altimeter data (Liu et al. Citation2022; Wu, Hu, and Guo Citation2014; Zhang et al. Citation2019; Wu et al. Citation2011)) with a few GCPs or without GCP (Wang et al. Citation2017; Zhang et al. Citation2019; Xinghui et al. Citation2018)”, which can be summarized from research over the last decade.
As for block adjustment with a few GCPs or without GCP, there are two main factors that constrain the positioning accuracy of BA: one is the imagery quality, and the other is the initial positioning accuracy of OSSI (Jin et al. Citation2018). Although some current high-resolution OSSI data are able to reach passable initial planar accuracy (with plane error at most 10 m), it still cannot meet the requirements of high-precision 3D product manufacture, which is necessary to be optimized through BA. Moreover, it is particularly vital to improving the elevation accuracy of OSSI – not only determines the elevation accuracy of the final products but also causes the inconsistency of planar positioning accuracy in stereo imagery models (Pi et al. Citation2022). Open-source global Digital Elevation Model (DEM) datasets, such as the 30-m Shuttle Radar Topography Mission (SRTM) elevation database, are generally used for assisting optical stereo mapping to achieve an improved level of elevation accuracy (Hao et al. Citation2016; Ping et al. Citation2016; Cao et al. Citation2020; Teo et al. Citation2010; Farr et al. Citation2007). In most circumstances, the elevation accuracy of open-source elevation data used in BA is quite low (ranging from 5 m to 10 m, or even worse), with much lower spatial resolution than that of the corresponding OSSIs. As a result, combined BA methods that are based on these available DEMs are unable to reach the required elevation accuracy of 1:50,000 or 1:10,000 large-scale stereo mapping missions.
In 2003, with the launch of Ice, Cloud, and land Elevation Satellite (ICESat) by the United States (Schutz et al. Citation2005), the development of spaceborne laser altimeters for global topographic mapping and surveying began to flourish. By the launch of ICESat-2 in 2018 (Markus et al. Citation2017), satellite-based laser altimetry has made a phased leap in detecting system design, ranging accuracy, footprint diameter, and observation coverage. Furthermore, compared to the aforementioned open-source data, data from satellite laser altimeters have the advantages of shorter update period, higher positioning precision, and lower acquisition cost (Wang et al. Citation2021), providing sufficient and supportive data for improving the elevation accuracy of OSSI through combined block adjustment methods.
In this paper, a geometric positioning model based on the integration of optical satellite imagery and spaceborne laser altimeter data is introduced, and the implementation algorithms of four key technologies in it are described in detail. Firstly, the principles and necessities of the research are elaborated by a literature review of existing geometric positioning methods integrating OSSI with satellite-based laser altimeter data. Then, the framework of our geo-positioning models based on the combination of OSSI and ICESat-2 laser control points is illustrated. Secondly, the four key technologies in the proposed model, including the acquisition and management of global Laser Control Points (LCPs), the association of laser control points and OSSI, the block adjustment method combining LCPs and OSSI, and the accuracy estimation and quality control techniques are expounded in order. Finally, a combined BA experiment using ZY-3 three-linear-array optical stereo imagery and ICESat-2 laser altimeter data was carried out at the testing area in Shandong Province, China. Experimental results proved that the combined block adjustment of ZY-3 OSSI and ICESat-2 LCPs achieved an elevation accuracy level of 0.06 m of mean error and 1.18 m of Root Mean Square Error (RMSE), showing the assistance of ICESat-2 data allows a significant improvement in the elevation accuracy of stereo models.
2. Principles of geometric positioning integrating optical satellite stereo imagery and laser altimeter data
Geometric positioning integrating optical satellite stereo imagery and laser altimeter data aims to improve the elevation accuracy of satellite stereo image products, including the following steps: (1) spaceborne laser altimeter data is filtered according to specific conditions, and reliable laser points are selected as LCPs; (2) the association between optical imagery stereo models and LCPs is estimated by an algorithm, providing a method to project LCPs onto stereo imageries; (3) a Rational Function Model (RFM) integrating optical stereo images and LCPs is proposed and estimated under the condition of no GCPs. During past decades, relative research has mostly focused on algorithms for selecting LCPs, algorithms for associating OSSI with LCPs, improvement of combined BA models, and quality estimation and control of proposed models.
2.1. Related work
As for the selecting process of LCPs, current spaceborne laser altimetry data sources can be divided into two categories according to usage: (1) specialized laser altimetry satellites, represented by ICESat and ICESat-2, launched by NASA. Researchers have proposed algorithms for LCPs’ selection using these data sources and carried out BA experiments in small areas (Li et al. Citation2017; Zhang et al. Citation2020; Wang Citation2018); (2) stereo mapping satellites, represented by Chinese satellites ZY-3 03, GF-7, etc., acquiring laser altimetry data and optical stereo images simultaneously (Liu et al. Citation2022; Tang et al. Citation2021). The former type is designed for laser ranging, with strong expertise, good observation platform stability, and high detecting accuracy. The latter type adopts simultaneous observation, acquiring laser points for elevation control as well as the optical stereo images. Meanwhile, the imaging mechanism of multi-sensor integration has limited the observation capability, which results in lower density and smaller coverage of laser points compared to that of the specialized laser altimetry satellites. compares the basic parameters of two types of laser altimetry satellites (Tang et al. Citation2020). Laser data acquired by specialized laser altimetry satellites have higher density and accuracy, better stability, wider application prospects, and are available from open sources. Therefore, they are more suitable for selecting elevation control points as more stable and reliable data sources for long-term use. Based on the above, this paper claims that specialized laser altimetry satellites, represented by ICESat-2, are better compatible with high-precision stereo mapping applications, which can be a specific suggestion for the design of future laser altimetry satellites.
Table 1. Basic parameters of several laser altimeter satellites used for stereo mapping.
For algorithms for associating OSSIs with LCPs, as the elevation accuracy of laser points is normally higher than planar, it is difficult to avoid the influence of planar errors of laser points on optical imageries if they are directly used as GCPs when associating with OSSI. Wu et al. used “local surface constraints” to develop a combined positioning model of LRO laser altimeter data and Chang’E-2 trilinear array imageries (Wu, Hu, and Guo Citation2014). Li et al. used plane and elevation coordinates of ICESat laser points in BA models separately, and experiments showed a remarkable improvement in the elevation accuracy of the ZY-3 stereo imagery model by adding after-selected laser points (Li et al. Citation2017). Jin Wang regarded ICESat laser points as “generalized elevation control points”, by which laser point was thought to represent the elevation of a small area rather than of a single point, and the model proposed significantly improved the vertical accuracy without any accuracy decrease in planar (Wang Citation2018). Tang et al. aligned laser footprint images with synchronized optical stereo images of GF-7, based on which automatic association of laser points and stereo imageries was achieved (Tang et al. Citation2021). Noticeably, their experimental results have shown that without the assistance of laser data, the use of only a few GCPs did not have a significant improvement to the elevation accuracy (for BA with four GCPs, the RMSE is 5.60 m). By stark contrast, after adding laser points, the elevation accuracy of combined BA improved a lot (for combined BA with four GCPs, the RMSE is 0.48 m).
For the improvement of geometric positioning models, most of the widely used BA methods without GCPs are based on the RFM, which is a general model that accurately fits the strict geometric imaging model of optical satellite imagery. RFM establishes the correspondence between the object point coordinates and the image point coordinates
in a simple mathematical form, with a generic expression as in EquationEquation (1)
(1)
(1) :
where are multi-order polynomials with
and
as parameters. Researchers have reviewed the principle and procedure of RFM-based combined BA methods in (Zhang et al. Citation2021) and (Wang Citation2018). Jin Wang designed the error observation equation of “generalized laser elevation points” based on RFM and adopted a classifying and weighting strategy for laser points, external control points, and virtual control points in BA (Wang Citation2018). Zhang et al. established an RFM-based combined BA model without GCPs by using GF-3 SAR ortho-imagery as plane control and ICESat laser points after-selected as elevation control, and finally achieved a plane accuracy of 7 m and an elevation accuracy of 3 m for ZY-3 optical stereo imagery (Zhang et al. Citation2021).
For techniques of accuracy estimation and quality control, researchers normally obtain checkpoints from field measurement results or existing Digital Orthophoto Model (DOM)/DEM products. The BA model’s residual distribution and distortions are roughly evaluated, which is not only very costly but also nonautomatic. No systematic reviews or studies have been made in this area yet.
In summary, research on geometric positioning integrating optical satellite stereo imagery and laser altimeter data currently faces the following problems:
For selecting LCPs, due to the differences in the design of the observation mechanism, compared to the specialized laser altimetry satellites (such as ICESat and ICESat-2), the stereo mapping satellites (such as ZY-3 03 and GF-7) are unable to meet the urgent demand of high-precision global stereo mapping for elevation control points;
For associating ISSI with LCPs, as the elevation accuracy of LCP is much higher than the plane, methods that treat the planar and elevation coordinates of LCP separately have been used typically to improve the elevation accuracy level of ISSI while maintaining the planar accuracy;
For block adjustment models combining OSSI and LCPs and quality control techniques, it is still difficult to avoid the reliance on field measurements and existing DOM/DEM products to acquire checkpoints. Given the high costs of time and expense of acquisition, only a few sparse checkpoints could be relied upon to estimate the overall quality of the model.
Nowadays, large-scale and high-precision stereo mapping has placed higher demands on the accuracy of elevation control points used in combined BA. According to (CH/T 9009.2-2010 Citation2010), For 1:10,000 scale mapping, the mean error of elevation accuracy of control points should be at most 0.1 m (on plain terrain); for 1:50,000 scale mapping, it should be at most 0.8 m.
As the single instrument carried by ICESat-2, the Advanced Topographic Laser Altimeter System (ATLAS) adopts a photon-counting technique, measuring the precise travel time of single photons to estimate the distance from the spacecraft to the laser footprint on the surface of the Earth. Different from the linear-detecting laser systems used in the past, ATLAS can obtain more detailed information reflecting the precise topography and provides a quantum leap in the density and precision of received laser points. As the most accurate satellite-based laser data that is available for free, ATLAS data reach a high vertical accuracy of 0.1 m with a small along-track beam spacing of 0.7 m. So far, it has collected global surface elevation for around four years. Besides, thanks to the high-density photon data, ATLAS has full coverage of global land. Hence, ATLAS can satisfy the desire for high-precision elevation control data of large-scale stereo mapping, and it is also supportive of the accuracy estimation and quality control of BA, which can further eliminate the reliance on ground data of stereo mapping.
2.2. The framework of our geometric positioning model
To address the aforementioned issues, this paper proposed a geometric positioning model integrating the OSSI and ICESat-2 laser data. illustrates the framework of our model. Firstly, the global LCPs are selected from ICESat-2 ATL08 data by the process described in (Cao et al. Citation2020). After that, they are classified by vertical accuracy level and geolocation to build a global LCP database, which will be introduced in Chapter III. Secondly, the OSSI is used to set up stereo models., while tie points on the OSSI are automatically generated and optimized through the algorithm described by (Bo, Mi, and Yingdong Citation2017). Thirdly, the integration of optical stereo images and laser altimetry data is carried out by associating LCPs with OSSI. Specifically, after the LCPs are selected out based on the LCP database and land cover map, we used an automatic algorithm to associate the tie points and the LCPs considering the topographic relief in order to generate “new elevation control points”, which will be described in Chapter IV. Finally, the geometric positioning process integrating LCPs and OSSI is achieved, including the combined BA using LCPs and the accuracy estimation and quality control of combined BA, which will be shown by combined BA experiments in Chapter V.
Figure 1. Framework of the geometric positioning model integrating OSSI and spaceborne laser altimeter data.
3. Acquisition and management of global LCPs
Firstly, the land elevation laser data collected by ICESat-2 land and vegetation height dataset ATL08 was preprocessed to separate the ground laser points (from 2020 to 2021, approximately 6 TB in total) (Neuenschwander et al. Citation2021). The acquisition and management of global laser elevation control points are completed according to the technical route shown in . After extracting LCPs using the two-step selecting method as described in (Wang et al. Citation2021), the acquired global LCPs are managed by geographical location and accuracy level to build a global database, with the following procedures: (1) an attribute information table is established to facilitate routine retrieval of LCPs. As the elevation accuracy of LCPs is related to factors such as terrain slope (te_slope), the attribute information table can be used as a basis for assigning weights to LCPs during block adjustment. (2) the table of elevation accuracy levels is created to select LCPs by different accuracy levels. The reference DEM used to calculate the accuracy level is acquired from the ICESat-2 ATL08 dataset, which is the best available open-source DEM value at the geolocation point (Wang et al. Citation2021; Neuenschwander et al. Citation2021). The reference elevation accuracy (Ref_Accur) is the difference between the interpolated elevation of the LCP (h_te_interp) and the reference DEM; the elevation accuracy levels (Lv_Accur) are calculated by rules in . (3) the geographical location table is built to partition and manage the global LCP data to facilitate quick retrieval according to latitude and longitude ranges. (4) The log information table, user information table, user role information table, etc. are created to record the access and usage of the database. After completing the extraction and management of global LCPs, the global LCP database is examined and visualized for analysis.
Figure 2. Acquisition and management of the global laser control points (LCPs).
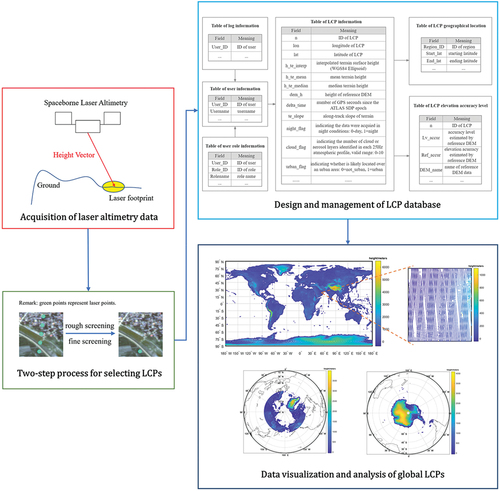
Table 2. Classification rules of LCPs by elevation accuracy.
The last block diagram of shows the global spatial distribution of LCPs. Above is the overview of global data (one point is plotted every 25 km along the track); the map of LCPs in the North Pole (60°N ~ 90°N) and South Pole (50°S ~ 90°S) is plotted below. The database has achieved complete coverage of the global land (including the polar regions) and has a sufficient density of LCPs in both along-track and across-track directions to meet the needs of high-precision three-dimensional positioning in a global context.
In this paper, about 559,298,827 LCPs were imported into our database eventually, with a density of around 4.9 points per square kilometer on the ground. Both the coverage and density of LCPs have far exceeded those of the previous large-spot spaceborne laser data. The constructed database has the advantages of small volume and easy portability (20.2 G in total) and can quickly find LCPs according to geographical coordinates, elevation accuracy levels, and other attributes, which provides basic data for the realization of combined adjustment of optical satellite stereo imagery and LCPs.
4. Association of LCPs and OSSI
4.1. Automatic screening LCPs based on the LCP database and land cover map
The LCP database relies on surface slope and elevation accuracy levels to estimate the accuracy of LCPs. Wang et al. evaluated the influence of slope on LCP’s accuracy: LCPs’ accuracy increases as the slope of terrain decreases. When the slope of LCPs was 2° or smaller, the mean elevation error was −0.09 m, and the RMSE was 0.47 m (Wang et al. Citation2021). All laser points in the database have a slope of less than or equal to 2°.
The relationship between the elevation accuracy level and the elevation accuracy of LCPs was quantitatively evaluated by high-precision airborne LiDAR data, and the results are shown in . LCPs of level 1 to level 4 have a mean elevation error of no more than 0.11 m and RMSE of no more than 0.56 m, accounting for 49.02% of the total; the mean elevation error of LCPs in level 5 is 0.14 m, and the RMSE is 0.70 m, accounting for 40.47% of the total number of LCPs; the mean elevation error of LCPs in level 6 is 0.30 m, and the RMSE is 1.94 m, accounting for 10.51% of the data.
Table 3. Evaluation accuracy of laser control points with different elevation accuracy levels.
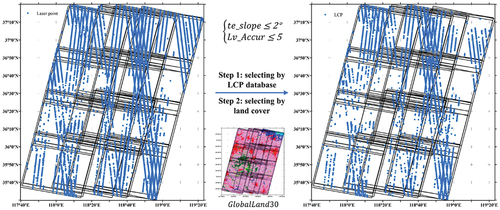
Taken together, the LCP with a lower slope and elevation accuracy level is more accurate. Therefore, we selected LCPs by the following two constraints: (1) ; (2)
. Besides, another screening based on the publicly available global land cover dataset GlobalLand30 (Chen, Ban, and Songnian Citation2014) is added to remove the LCPs in water bodies, artificial surfaces, woodlands, wetlands, etc. The two-step process of screening is shown in .
Figure 3. Automatic LCPs screening based on the LCP database and land cover (the left is before the process, and the right is after the process).
4.2. Automatic association of LCPs and OSSI based on topographic relief
As there is no footprint camera on ICESat-2, the exact position of the laser spot on the OSSI cannot be reached directly through optical means. To be used as control data for optical stereo mapping, LCPs are first sought to be accurately associated with optical stereo images.
The planar and vertical information of the LCP is separated to improve the elevation accuracy of RFM without sacrificing any plane accuracy. Firstly, the coordinates of the tie points of OSSI are projected from the image to the ground
. Then, the nearest tie point to the currently processed LCP
is searched by specific rules. Finally, a new Elevation Control Point (ECP) is constructed with the planar coordinate
of the tie point and the elevation coordinate
of LCP. The RFM of ECP can be modified from EquationEquation (1)
(1)
(1) :
where is the image coordinate of ECP, and
is the ground coordinate of ECP. For solving EquationEquation (2)
(2)
(2) , the key step is to calculate the coordinate
, i.e. to associate each LCP with a tie point.
In Section A of Chapter IV, we have extracted LCPs from the database, in which the LCPs’ slope is less than 2° and has an average of 0.6°. Therefore, as shown in the top diagram of , within a radius of 50 m centered on the LCP, it can be considered that the elevation changes of the ground are less than 0.5 m, which is a tolerable vertical error for large-scale satellite stereo mapping.
Figure 4. Automatic association of LCPs and OSSI based on topographic relief.
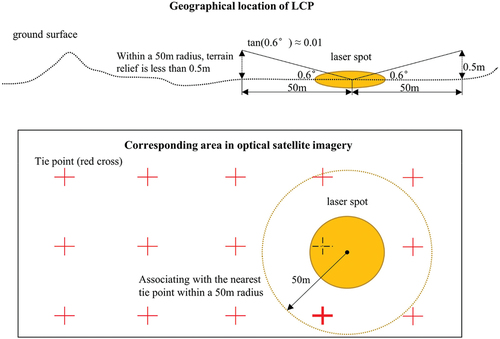
Based on the above, this paper proposed a method for the automatic association between LCPs and tie points based on topographic relief. The specific algorithms are as follows. (1) Generate a 50 m radius range centered on the LCP and use its external rectangle to do the initial searching. If the number of tie points within the outer rectangle box is 0, the search is stopped, and no result is output. (2) Calculate the planar Euclidean distance between the LCP and each tie point within the outer rectangle. If none of the distances is less than 50 m, the search stops, and no result is output. (3) Sort the distances less than 50 m. the tie point with the smallest distance is the pairing result of the current LCP, and its one-to-one association with the LCP is recorded. (4) After all LCPs have been searched and paired, the ECPs are regenerated as from the elevation of LCPs and the plane coordinates of the corresponding tie points.
5. Geo-positioning integrating OSSI and LCPs
5.1. Experimental area and data
We chose an experimental field in Zibo City, Shandong Province, China, for the combined block adjustment experiment. The test area has a relatively gentle topography, mostly plains, with a ground altitude of around −40 m to 1100 m.
Land cover maps of the test area were obtained from the GlobalLand30 dataset. As shown in the left part of , the surface cover of this area is dominated by arable land (pink), grassland (light green), shrubs (green), and woodland (dark green), with a few artificial surfaces (red) and inland water bodies (dark blue).
Figure 5. Experimental area and data (the left is the land cover map, and the right is ZY-3 optical stereo imagery).
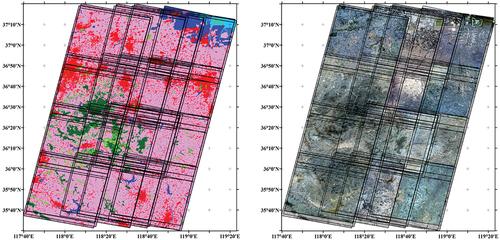
The OSSI data includes 62 high-resolution stereo images acquired by ZY-3 02 satellite from November 3rd, 2014, to September 29th, 2018. As shown in the right part of , there are 16 scenes of optical stereo imagery pairs, consisting of 15 BWD (backward) images and 15 FWD (forward) images with a ground resolution of 3.6 m, 16 NAD (downward) images with a specification resolution of 2.1 m, and 16 MUX (multispectral) images with a resolution of 6 m. The total data volume of the OSSI is about 42.5 GB.
5.2. Association of LCPs and OSSI
LCPs were extracted based on the method described in Section A of Chapter IV. Firstly, from our database, a total of 25,905 laser points located at the test site were identified. After the two-step screening procedure based on the LCP database and the land cover map, a total of 19,143 LCPs were selected out for the follow-up combined BA experiments, as shown in .
Secondly, the 16 pairs of optical stereo images of the ZY-3 satellite were matched to build the optical stereo models. GPU-accelerated tie-point matching was performed, and then the results of tie-point matching were subjected to roughness detection and rejection (Satirapod, Trisirisatayawong, and Homniam Citation2003). The generated tie points are shown in .
Figure 6. Distribution of tie points (left) and ECPs generated from the association of LCPs and OSSI (right).
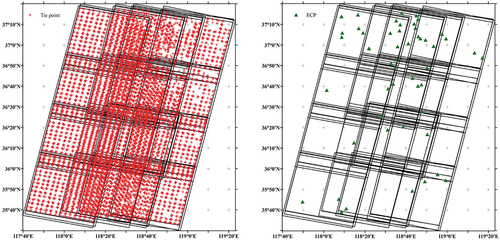
Then, as Section B of Chapter IV specified, the LCPs and the tie points of OSSI were automatically associated based on topographic relief. By the four-step searching and pairing, the matching results of 52 pairs of LCP and tie points were created, allowing the construction of 52 ECPs. The location of ECPs is displayed in .
5.3. Combined block adjustment of LCPs and OSSI and the accuracy estimation
Finally, the combined block adjustment models assisted by the ECPs were iteratively solved by least squares. The quality assessment results of the block adjustment are displayed in . In , the X residual and Y residual of the tie points in image space is used for evaluating the plane accuracy of stereo models. We also experimented on BA without control points as a comparison of BA combining LCPs and OSSI. After roughness detection and rejection, the number of tie points decreased, and the planimetric accuracy improved significantly in both BA experiments. It can be concluded that our combined BA method does not result in a relative reduction in planar accuracy.
Table 4. Plane accuracy of the tie points (px).
Table 5. Elevation accuracy of the combined BA (m).
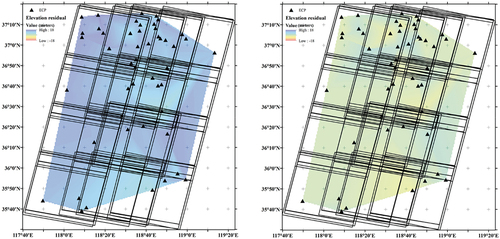
The vertical residuals of checkpoints are shown in to estimate the elevation accuracy before and after BA. Before the block adjustment, the Mean Error (ME) of elevation is 13.20 m, with an RMSE of 3.88 m. After the geometric positioning integrating LCPs and the OSSI, the elevation differences were greatly reduced, with a ME of 0.06 m and RMSE of 1.18 m, benefiting from the elevation constraints of the laser points. Therefore, it can be inferred that the original model had a systematic offset on the vertical, which was considerably corrected by the laser-assisted block adjustment, as demonstrated in . Consequently, the addition of the LCPs had a significant contribution to the elevation accuracy of optical stereo imagery models.
Figure 7. Elevation accuracy before and after the combined BA (the left is before BA, and the right is after the combined BA).
6. Conclusion
This paper carries out a comprehensive study on the framework and key technologies for the geometric positioning integrating optical satellite stereo imagery and spaceborne laser altimetry data. Overall, the main contributions and innovations are as follows.
The principle and necessity of geometric positioning integrating OSSI and ICESat-2 laser altimetry data are clarified. Noticeably, the merits and drawbacks of using the specialized laser altimetry satellites (such as ICESat-2) and the stereo mapping satellites with simultaneous optical and laser observation (such as GF-7) are illustrated. According to comparison, it is argued that data of specialized laser altimetry satellites are more consistent with high-precision stereo mapping applications, which can be a specific suggestion for the design of future laser altimetry satellites.
The geometric positioning model that integrates optical satellite stereo imagery and the global ICESat-2 LCP database is proposed. After the acquisition of global ICESat-2 LCPs, a global database containing 560 million LCPs is established, where the elevation accuracy of around 90% LCPs is less than 0.7 m (RMSE). The constructed global LCP database is lightweight (20.2 G in total), portable, and reusable while ensuring coverage and accuracy, offering high-precision elevation control data for stereo mapping missions.
The approach for automatically associating LCPs with OSSI is proposed. The planar and vertical coordinates of the LCPs are separated to improve the elevation accuracy without sacrificing the plane accuracy of the combined BA. Particularly, after the LCPs are selected out based on the LCP database and land cover map, we used an automatic algorithm to associate the tie points and the LCPs according to the topographic relief condition, which can efficiently derive high-precision elevation control points for the combined BA.
Experimental validation of the proposed method was carried out at the Shandong test site. The geometric positioning was performed by integrating OSSI obtained by ZY-3 and LCPs extracted from ICESat-2 ATL08 data. According to the results, after the combined BA, the elevation differences of stereo models significantly declined (ME: 0.06 m; RMSE: 1.18 m) compared to that of the stereo models before the BA (ME: 13.20 m; RMSE: 3.88 m), showing the integration of OSSI and the LCPs was conducive to the improvement of elevation accuracy.
The acquisition of global laser control points has great significance for improving the elevation accuracy of stereo mapping without ground control. With the assistance of LCPs, the combined positioning model constructed in this paper has successfully corrected the systematic vertical offset of the optical image stereo model. However, during the accuracy estimation process, the laser points still have uneven and insufficient coverage of the optical stereo images. How to make complete use of the global LCP database for more refined accuracy analysis and quality control of block adjustment, based on a large amount of laser data as checkpoints, will be the next research direction. In addition, considering the complexity of the global surface, improving, and experimenting the geometric positioning model integrating OSSI and LCPs to make it more adaptive to the undulations of terrain, particularly of the mountainous and hilly terrain, will be our further work.
Acknowledgments
The authors would like to thank the anonymous reviewers for their constructive suggestions and the China Center for Resources Satellite Data and Application for providing the experimental data. These supports are valuable.
Disclosure statement
No potential conflict of interest was reported by the authors.
Data availability statement
The ZY-3 stereo imagery data that support the findings of this study are restricted in access and use, but can be queried and requested from the website of the China Centre for Resources Satellite Data and Application (CRESDA) (http://www.cresda.com/EN/) and Chinese Natural Resources Satellite Remote Sensing Cloud Service Platform (http://sasclouds.com/chinese/normal/). The ICESat-2 data are openly available and can be acquired from the National Snow & Ice Data Center (NSIDC) at https://nsidc.org/data/. The GlobalLand30 data can be downloaded at https://www.globallandcover.com/.
Additional information
Funding
Notes on contributors
Mi Wang
Mi Wang is a professor at the State Key Laboratory of Information Engineering in Surveying, Mapping, and Remote Sensing at Wuhan University. He received his Ph.D. degree from Wuhan University in 2001. His research interests include high-resolution remote sensing satellite ground processing and the integration and rapid update of photogrammetry and GIS.
Yu Wei
Yu Wei is a graduate student at the State Key Laboratory of Information Engineering in Surveying, Mapping, and Remote Sensing at Wuhan University, majoring in photogrammetry and remote sensing. She received her Bachelor Degree from Wuhan University in 2020. Her area of interests includes the processing of spaceborne laser altimetry data and stereo mapping.
Yingdong Pi
Yingdong Pi received the B.Eng. and M.Sc. and Ph.D. degrees in photogrammetry and remote sensing from Wuhan University, Wuhan, China, in 2014, 2017, and 2021, respectively. Now, he is a Postdoctoral Fellow of the State Key Laboratory of Information Engineering in Surveying, Mapping, and Remote Sensing at Wuhan University. His research interests include high precision remote sensing image processing and deep space detection.
References
- Bo, Y., W. Mi, and P. Yingdong. 2017. “Block Adjustment Without GCPs for Large-Scale Regions Only Based on the Virtual Control Points.” Acta Geodaetica et Cartographica Sinica 46 (7): 874–881. doi:10.11947/j.AGCS.2017.20160588.
- Cao, H., T. Pengjie, L. Haihong, and Z. Zuxun. 2020. “Using DEM as Full Controls in Block Adjustment of Satellite Imagery.” Acta Geodaetica et Cartographica Sinica 49 (01): 79–91. doi:10.11947/j.AGCS.2020.20190226.
- Chen, J., Y. Ban, and L. Songnian. 2014. “Open Access to Earth Land-Cover.” Nature 514 (7523): 434. doi:10.1038/514434c.
- CH/T 9009.2-2010. 2010. “Digital Products of Fundamental Geographic Information 1:5000 1:10000 1:25000 1:50000 1:100000 Digital Eelevation Models.” Institute of Survey and Mapping Standardization of China Survey and Mapping Bureau.
- Chunquan, C., Z. Jixian, H. Guoman, Z. Li, and Y. Jinghui. 2017. “Combined Positioning of TerraSar-X and SPOT-5 HRS Images with RFM Considering Accuracy Information of Orientation Parameters.” Acta Geodaetica et Cartographica Sinica 46 (2): 179–187. doi:10.11947/j.AGCS.2017.20160138.
- Farr, T. G., P. A. Rosen, E. Caro, R. Crippen, R. Duren, S. Hensley, M. Kobrick, et al. 2007. “The Shuttle Radar Topography Mission.” Reviews of Geophysics 45 (2): RG2004. doi:10.1029/2005RG000183.
- Hao, Z., Z. Guo, J. Yonghua, and W. Taoyang. 2016. “A SRTM-DEM-Controlled Ortho-Rectification Method for Optical Satellite Remote Sensing Stereo Images.” Acta Geodaetica et Cartographica Sinica 45 (3): 326–331. doi:10.11947/j.AGCS.2016.20150358.
- Jianya, G., W. Mi, and Y. Bo. 2017. “High-Precision Geometric Processing Theory and Method of High-Resolution Optical Remote Sensing Satellite Imagery Without GCP.” Acta Geodaetica et Cartographica Sinica 46 (10): 1255–1261. doi:10.11947/j.AGCS.2017.20170307.
- Jin, W., Z. Yong, Z. Zuxun, L. Xiao, T. Pengjie, and S. Mengxiao. 2018. “ICESat Laser Points Assisted Block Adjustment for Mapping Satellite-1 Stereo Imagery.” Acta Geodaetica et Cartographica Sinica 47 (3): 359–369. doi:10.11947/j.AGCS.2018.20170425.
- Kadota, T., M. Takagi. 2002. “Acquisition Method of Ground Control Points for High-Resolution Satellite Imagery.” Proceedings of the 23rd Asian Conference on Remote Sensing, Kathmandu, Nepal. 173.
- Li, D., L. Ding, and Z. Shao. 2021. “Application-Oriented Real-Time Remote Sensing Service Technology.” Journal of Remote Sensing 25 (1): 15–24. doi:10.11834/jrs.20210260.
- Li, G., X. Tang, C. Zhang, X. Gao, and J. Chen. 2017. “Multi-Criteria Constraint Algorithm for Selecting ICESat/GLAS Data as Elevation Control Points.” Journal of Remote Sensing 21 (1): 96–104. doi:10.11834/jrs.20175269.
- Liu, Y., F. Mo, Y. Zhang, J. Xie, Q. Li, F. Hu, and C. Liu. 2021. “Validation of Preliminary Geometric Positioning Accuracy for China’s Civil High-Resolution Surveying and Mapping Satellites: Ziyuan-3 01 and Gaofen-7 Panchromatic Imagery.” Remote Sensing Letters 12 (6): 521–530. doi:10.1080/2150704X.2021.1903607.
- Liu, C., X. Tang, H. Zhang, G. Li, X. Wang, and F. Li. 2022. “Geo-Positioning Improvement of ZY-3 Satellite Imagery Integrating GF-7 Laser Altimetry Data.” IEEE Geoscience and Remote Sensing Letters 19 (1): 6503805. doi:10.1109/LGRS.2021.3136389.
- Liu, C., X. Tang, P. Zhou, N. Cao, X. Wang, F. Li 2018. “Geometric Quality Improvement and Verification of ZY3-02 Imagery.” 2018 Fifth International Workshop on Earth Observation and Remote Sensing Applications (EORSA) (pp.1–5). DOI: 10.1109/EORSA.2018.8598624.
- Markus, T., T. Neumann, A. Martino, W. Abdalati, K. Brunta, B. Csatho, S. Farrell, et al. 2017. “The Ice, Cloud, and Land Elevation Satellite-2 (ICESat-2): Science Requirements, Concept, and Implementation.” Remote Sensing of Environment 190 (1): 260–273. doi:10.1016/j.rse.2016.12.029.
- Neuenschwander, A. L., K. L. Pitts, B. P. Jelley, J. Robbins, B. Klotz, S. C. Popescu, R. F. Nelson, D. Harding, D. Pederson, and R. Sheridan. 2021. ATLAS/ICESat-2 L3A Land and Vegetation Height, Version 5 [Data Set]. Accessed 11 January 2022. Boulder, Colorado USA: NASA National Snow and Ice Data Center Distributed Active Archive Center. doi:10.5067/ATLAS/ATL08.005.
- Pi, Y., B. Yang, X. Li, and M. Wang. 2022. “Robust Correction of Relative Geometric Errors Among GaoFen-7 Regional Stereo Images Based on Posteriori Compensation.” IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 15 (1): 3224–3234. doi:10.1109/JSTARS.2022.3169474.
- Ping, Z., T. Xinming, C. Ning, W. Xia, L. Guoyuan, and Z. Heng. 2016. “SRTM-Aided Stereo Image Block Adjustment Without Ground Control Points.” Acta Geodaetica et Cartographica Sinica 45 (11): 1318–1327. doi:10.11947/j.AGCS.2016.20160219.
- Satirapod, C., I. Trisirisatayawong, and P. Homniam. 2003. “Establishing Ground Control Points for High-Resolution Satellite Imagery Using GPS Precise Point Positioning.” IGARSS 2003: IEEE International Geoscience and Remote Sensing Symposium, Proceedings 7 (1): 4486–4488. doi:10.1109/IGARSS.2003.1295555.
- Schutz, B. E., H. J. Zwally, C. A. Shuman, D. Hancock, and J. P. DiMarzio. 2005. “Overview of the ICESat Mission.” Geophysical Research Letters 32 (21): L21S01. doi:10.1029/2005GL024009.
- Tang, X., C. Liu, H. Zhang, X. Wang, L. Guoyuan, M. Fan, and L. Fengxiang. 2021. “GF-7 Satellite Stereo Images Block Adjustment Assisted with Laser Altimetry Data.” Geomatics and Information Science of Wuhan University 46 (10): 1423–1430. doi:10.13203/j.whugis20210417.
- Tang, X., J. Xie, M. Fan, X. Dou, L. Xin, L. Shaoning, L. Song, et al. 2020. “GF-7 Dual-Beam Laser Altimeter On-Orbit Geometric Calibration.” Acta Geodaetica et Cartographica Sinica 50 (3): 384–395. doi:10.11947/j.AGCS.2021.20200397.
- Teo, T.A., L.C. Chen, C.L. Liu, Y.C. Tung, and W.Y. Wu. 2010. “DEM-Aided Block Adjustment for Satellite Images with Weak Convergence Geometry.” IEEE Transactions on Geoscience & Remote Sensing 48 (4): 1907–1918. doi:10.1109/TGRS.2009.2033935.
- Wang, J. 2018. “Research on Key Technology of Combined Block Adjustment of ICESat Laser Points and Optical Satellite Imagery.” (Doctoral Dissertation, Wuhan University). CNKI.
- Wang, M., Y. Wei, B. Yang, and X. Zhou. 2021. “Extraction and Analysis of Global Elevation Control Points from ICESat-2/ATLAS Data.” Geomatics and Information Science of Wuhan University 46 (2): 184–192. doi:10.13203/j.whugis20200531.
- Wang, M., B. Yang, D. Li, J. Gong, and Y. Pi. 2017. “Technologies and Applications of Block Adjustment Without Control for ZY-3 Images Covering China.” Geomatics and Information Science of Wuhan University 42 (4): 427–433. doi:10.13203/j.whugis20160534.
- Wu, B., J. Guo, Y. Zhang, B. A. King, Z. Li, and Y. Chen. 2011. “Integration of Chang’e-1 Imagery and Laser Altimeter Data for Precision Lunar Topographic Modeling.” IEEE Transactions on Geoscience and Remote Sensing 49 (12): 4889–4903. doi:10.1109/TGRS.2011.2153206.
- Wu, B., H. Hu, and J. Guo. 2014. “Integration of Chang’e-2 Imagery and LRO Laser Altimeter Data with a Combined Block Adjustment for Precision Lunar Topographic Modeling.” Earth and Planetary Science Letters 391 (1): 1–15. doi:10.1016/j.epsl.2014.01.023.
- Xinghui, Y., Y. Hongjian, F. Wang, W. Dongxia, and L. Xiaojun. 2018. “Multi-Observed Block Adjustment for Satellite Images Without Ground Control Points.” Remote Sensing Technology and Application 33 (3): 555–562. doi:10.11873/j.issn.1004-0323.2018.3.0555.
- Zhang, G., B. Jiang, T. Wang, Y. Ye, and X. Li. 2021. “Combined Block Adjustment for Optical Satellite Stereo Imagery Assisted by Spaceborne SAR and Laser Altimetry Data.” Remote Sensing 13 (16): 3062. doi:10.3390/rs13163062.
- Zhang, L., Y. Sun, Q. Du, and X. Han. 2019. “Image Matching and Accurate Information Extraction of Multi-Source Optical Satellite Imagery.” Science of Surveying and Mapping 44 (6): 96–104. doi:10.16251/j.cnki.1009-2307.2019.06.014.
- Zhang, X., S. Xing, X. Qing, G. Zhang, L. Pengcheng, L. Jiao, and C. Liu. 2020. “Joint Block Adjustment for ATLAS Data and ZY3-02 Stereo Imagery.” Infrared and Laser Engineering 49 (S2): 155–162. doi:10.3788/IRLA20200194.
- Zhang, G., K. Xu, P. Jia, X. Hao, and D. Li. 2019. “Integrating Stereo Images and Laser Altimeter Data of the ZY3-02 Satellite for Improved Earth Topographic Modeling.” Remote Sensing 11 (20): 2453. doi:10.3390/rs11202453.