
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Accurate estimation of forest terrain and canopy height is crucial for timely understanding of forest growth. Gao Fen-7 (GF-7) Satellite is China’s first sub-meter-level three-dimensional (3D) mapping satellite for civilian use, which was equipped with a two-line-array stereo mapping camera and a laser altimeter system that can provide stereo images and full waveform LiDAR data simultaneously. Most of the existing studies have concentrated on evaluating the accuracy of GF-7 for topographic survey in bare land, but few have in-depth studied its ability to measure forest terrain elevation and canopy height. The purpose of this study is to evaluate the potential of GF-7 LiDAR and stereo image for forest terrain and height measurement. The Airborne Laser Scanning (ALS) data were utilized to generate reference terrain and forest vertical information. The validation test was conducted in Pu’er City, Yunnan Province of China, and encouraging results have obtained. The GF-7 LiDAR data obtained the accuracy of forest terrain elevation with RMSE of 8.01 m when 21 available laser footprints were used for results verification; meanwhile, when it was used to calculate the forest height, R2 of 0.84 and RMSE of 3.2 m were obtained although only seven effective footprints were used for result verification. The canopy height values obtained from GF-7 stereo images have also been proven to have high accuracy with the resolution of 20 m × 20 m compared with ALS data (R2 = 0.88, RMSE = 2.98 m). When the results were verified at the forest sub-compartment scale that taking into account the forest types, further higher accuracy (R2 = 0.96, RMSE = 1.23 m) was obtained. These results show that GF-7 has considerable application potential in forest resources monitoring.
1. Introduction
Forest is the largest carbon reservoir in the terrestrial ecological carbon sink system and plays an important role in reducing the concentration of greenhouse gas in the atmosphere and mitigating global warming (Shugart, Saatchi, and Hall Citation2010). Accurate estimation of forest terrain and canopy height is conducive to timely understanding of forest growth and carbon storage (Brown Citation2002; Dixon et al. Citation1994), so as to better assess its capability of carbon sink (Pan et al. Citation2011). Furthermore, canopy height can be employed to estimate forest aboveground biomass and model with other key ecosystem variables (such as primary productivity and biodiversity) (Asner et al. Citation2012; Goetz and Dubayah Citation2011; Potapov et al. Citation2021).
Field measurement is a traditional method to achieve forest terrain and height. Through selecting forest sample plots or ground sample points in the field and measuring the average height of the vegetation or the elevation of ground points manually, the forest growth or terrain in a certain area can be represented to some extent (Korhonen et al. Citation2006; Tinkham et al. Citation2018). This kind of method is labor exhaustive and difficult to achieve cost-effectively the required accuracy and extent. For that reason, researchers often use terrestrial and aerial remote sensing systems to retrieve forest height information and consider field measurement data as calibration or verification data of remote sensing models. Airborne Laser Scanning (ALS) technology is the most commonly used method for estimating forest terrain and height and has proven high accuracy, which benefited from its strong penetrability to the forest canopy. However, this method is expensive and impractical over regional or global extent (Coops et al. Citation2021; Dalagnol et al. Citation2022; Hyyppä et al. Citation2008; Lovell et al. Citation2005).
The latest development of sensor technology enables spaceborne LiDAR systems to collect forest terrain and height data over regional or even global regions at a lower cost. Satellite-based forest canopy height was previously limited to NASA Geoscience Laser Altimeter System (GLAS) (Lefsky Citation2010; Simard et al. Citation2011). In recent years, the NASA Ice, Cloud, and land Elevation Satellite-2 (ICESat-2) LiDAR instrument and Global Ecosystem Dynamics Investigation (GEDI) system have been widely used (Ni, Zhang, and Sun Citation2021; Popescu et al. Citation2018; Potapov et al. Citation2021; Salas Citation2021). Liu, Li, et al. (Citation2022) have used ALS data as a reference to compare the accuracy of height measurement between ICESat-2 and GEDI and revealed that GEDI was superior to ICESat-2 in estimating the canopy height in forest lands in the US. Vatandaslar, Narin, and Abdikan (Citation2022) have assessed the accuracies of stand height retrieved by GEDI and ICESat-2 satellites using stand-type maps and field-measured inventory data as references. They found that GEDI and ICESat-2 missions rarely achieve the standards needed for stand scale forest inventories when used alone. Overall, spaceborne LiDAR data can accurately measure the vertical structure of the forest, but it is difficult to support continuous forest management planning due to its discrete point distribution of data acquisition (Hancock et al. Citation2019; Sun et al. Citation2008). Researchers often combined the spaceborne LiDAR with other imaging remote sensing technologies to obtain forest height (Duncanson et al. Citation2020; Nandy, Srinet, and Padalia Citation2021; Potapov et al. Citation2021).
The high-resolution satellite stereo images obtained through different satellites (such as Worldview, Quickbird, SPOT, IKONOS, ZY3, ALOS/PRISM) can realize continuous measurement of forest canopy (Hancock et al. Citation2019; Liu et al. Citation2019; Ullah et al. Citation2020; Wang, Wei, and Pi Citation2023) and has significant advantages in temporal resolution, wide regional coverage, and sub-scale ground resolution (Li, Wang, and Jiang Citation2021; Straub et al. Citation2013). For example, St‐Onge, Hu, and Vega (Citation2008) demonstrated the feasibility to map forest height using stereo IKONOS images. Neigh et al. (Citation2014) reported that stereo IKONOS images could be used to estimate forest height with R2 > 0.7 and RMSE of 2.6m−3 m. Ni et al. (Citation2014) reported that the canopy height extracted from the ALOS/PRISM stereo imagery had a good correlation with airborne large footprint LiDAR data (R2 = 0.74, RMSE = 2.6 m). They also demonstrated that forest height was remained in the ASTER Global Digital Elevation Model (ASTER GDEM) produced using stereo images (Ni, Sun, and Ranson Citation2015). Montesano et al. (Citation2019) evaluated the variation in canopy surface estimates captured from Worldview-1/2/3 stereo images. However, in the dense forest environment where the forest surface is invisible, generating Digital Terrain Model (DTM) using stereo images is a challenging task. Therefore, the high-resolution DTM produced from ALS data is commonly required for the elevation normalization to get the Canopy Height Model (CHM) (Goldbergs et al. Citation2019; Persson and Perko Citation2016; St‐Onge, Hu, and Vega Citation2008). Vastaranta et al. (Citation2013) have proved that the accuracy and precision of CHM indirectly reflect the quality of the DTM used. The deciduous forest is a special case whose ground surface elevation can be detected in the leaf-off condition. Ni, Sun, and Ranson (Citation2015) demonstrated the feasibility using ZY-3 stereo images and reported that the estimation accuracy was about 2.5 m. Therefore, accurate description of forest terrain and canopy height through remote sensing images or LiDAR data is a necessary prerequisite for achieving high-precision forest resource survey.
China has launched the GF-7 satellite, which was equipped with a two-line-array stereo mapping camera and a laser altimeter system that can provide stereo images and full waveform LiDAR data simultaneously (Xie et al. Citation2020). Most of the researches have focused on evaluating the accuracy of GF-7 data for the terrain measurement at bare ground (Chen, Zhang, et al. Citation2022; Li, Wang, and Jiang Citation2021; Ren et al. Citation2020; Yao et al. Citation2021), and there is limited research on its ability to measure forest terrain and canopy height to the authors’ knowledge. Sun et al. (Citation2022) have evaluated the performance of GF-7 LiDAR data in ground elevation retrieval over forest areas, but they focused on analyzing the impact of different factors (slope, signal-to-noise ratio, and vegetation height) on ground elevation estimation. They did not evaluate the measurement ability of laser altimetry data and simultaneously obtained stereo images on forest height. Liu, Su, et al. (Citation2022) have used DTM obtained from ALS data to normalize point clouds generated by stereo matching, extracted different height variables, and finally regressed these height variables with measured sample plots to establish the optimal forest height estimation model. They did not verify the measurement ability of GF-7’s stereo images for forest height with existing data. Therefore, the primary objectives of this study are to comprehensively evaluate the potential of GF-7’s stereo images and laser altimetry data in estimating forest terrain elevation and canopy height and compare them with ALS data at multiple scales, providing reference for application of GF-7 in forest resource monitoring.
2. Materials
2.1 Study area
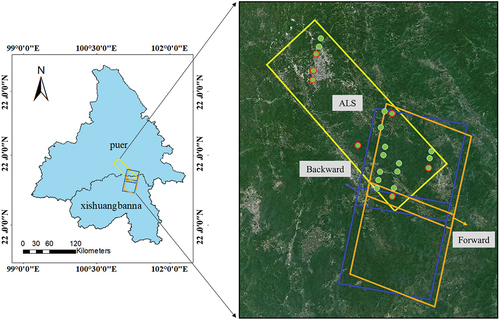
gives an overview of the study area, which is located in southeast of Pu’er City, Yunnan Province (101.05 E ~ 101.35 E, 22.25N ~ 22.75 N). The elevation of this area ranges from 800 m to 1854 m, which is located at the junction of the north tropical zone and the south subtropical zone, with good weather conditions and abundant plant resources. The annual average temperature and precipitation are 20.2°C and 1673.5 mm, respectively. The main vegetation types in this area are mountain rain forest, valley rain forest, and monsoon evergreen broad-leaved forest. The research area covers the entire Sun River Reserve, which is a nature reserve for the protection of the typical subtropical monsoon evergreen broad-leaved forest ecosystem in Yunnan and the forest ecosystem types with rare and endemic animal and plant species.
Figure 1. The study area and data used through this study. The left figure shows the site of the study area, which is located at the junction of Pu’er and Xishuangbanna cities. Blue and orange squares in the figure indicate the backward and forward images in the same orbit of GF-7. The yellow rectangle shows the flight coverage area of the airborne LiDAR. The small green circle dots are the laser footprints used to calculate the understory terrain, and the green circle dots with red boundaries are the effective footprints that are used to calculate the forest canopy height.
2.2 Data
2.2.1 GF-7 stereo images and laser footprints
The GF-7 satellite is the 1:10,000 scale stereo mapping satellite developed by China, which was launched in November 2019. The satellite was equipped with a dual linear-array stereo mapping camera and a laser altimeter system. The dual linear-array stereo camera including a forward Charge-Coupled Device (CCD) camera with a tilt angle of +26° and a backward CCD with a tilt angle of −5° from nadir, which can effectively obtain panchromatic stereo images with a swath width of 20 km and a resolution better than 0.8 m. Meanwhile, the multispectral images with the same swath width of 20 km and a resolution of 3.2 m can also be obtained. The two sets of stereo image data used in this study were all acquired on 5 March 2021, which were obtained in the same orbit and had all the two views. They were processed to level 1A. Panchromatic images were utilized to generate multi-view point cloud data. The spatial extent of the stereo images is shown as blue and orange squares in .
The laser altimeter system integrated in GF-7 satellite employs dual beams, and the angle between each beam and the nadir is 0.7°. The system emits 1064 nm laser pulses to the ground at 3 Hz observation frequency to achieve ground observation, forming discrete laser footprints with an along-track spacing of about 2.4 km and a cross-track spacing of about 12.25 km. The diameter of laser footprints is about 20 m. The full waveform data are recorded with 2 GHz. Since the number of GF-7 waveform bins is 800 and the corresponding distance value of waveform sampling interval is 7.5 cm, the maximum distance value of GF-7 waveform recording is 60 m. The satellite uses the Laser Footprint Camera (LFC) to record the intensity distribution of the laser emission footprint and the object image around the ground impact position. The footprint image is commonly used to construct the geometric relationship and realize registration between the laser footprints and the stereo images (Chen, Tang, et al. Citation2022). Overall, 42 level 1A laser footprints of GF-7 covering the flight range of airborne LiDAR were obtained in this study, and the dates are 13 September 2021, 9 January 2022, 14 January 2022, 9 March 2022, 14 March 2022, 12 May 2022, 5 November 2022, and 29 December 2022.
2.2.2 Airborne LiDAR data
Airborne LiDAR data were collected in December of 2020 using a Riegl VQ580- II laser scanner integrated with the Chinese Academy of Forestry LiDAR, Thermal, CCD and Hyperspectral (CAF-LiTCHy) airborne observation system (Pang et al. Citation2020). The laser scanner had a wavelength of 1064 nm and a beam divergence of 0.25 mrad. With a pulse length of 3 ns, this instrument had a max laser repetition pulse rate of 2000 kHz. The CAF-LiTCHy airborne observation system was installed on a fixed wing aircraft. The LiDAR data were acquired at an altitude of 3050 m with a flight speed of 216 km/h. The lateral overlap rate between adjacent fly routes was more than 75%, and the point density reached more than 2 to 4 points/m2. The point cloud spatial extent is exhibited as a yellow rectangle in . Point cloud data were first de-noised and classified into ground and non-ground points using LASTools software; then, a DSM with a resolution of 2 m was established from original points, and a DTM with a resolution of 2 m was established from ground points using the pit-free algorithm; finally, the CHM of the study area was obtained through subtracting DTM from DSM.
2.2.3 Forest inventory data
Forest sub-compartment data were collected from the local forestry department. These data were investigated based on the forest management unit in 2016. Each sub-compartment has similar forest biology and management characteristics. Overall, a total of 11,693 sub-compartments in the flight range of ALS and 1726 sub-compartments in the overlap area of GF-7 stereo images and ALS data were utilized. The attributes contained in each sub-compartment include forest type, the dominant tree species, average height, canopy closure, age group, aboveground biomass, and standing volume.
3. Methods
3.1 Terrain and canopy height estimation based on spaceborne LiDAR
To select the highest quality data, we filtered the available GF-7 spaceborne LiDAR data. Firstly, successfully processed laser waveform data were selected and used in this study. Secondly, the mean and standard deviation of the intensity values of the 50 bins in begin and end location of the signal in these waveform data were calculated, respectively. The arithmetic average of the mean values of waveform and standard deviation values of waveform were considered as signal background noise (Pang et al. Citation2006). And then, the Signal-to-Noise Ratio (SNR) was calculated through combining the maximum value of waveform intensity with the estimated waveform signal background noise (Fayad et al. Citation2020), as indicated in EquationEquation (1)(1)
(1) . In the actual calculation process, the estimated noise in begin and end location of signal of the waveform should ensure a small difference. (The difference between the mean value in beginning and end location is generally less than 3.)
where SNR represents the signal-to-noise ratio, is the maximum value of waveform intensity,
is the arithmetic average of the mean values of waveform, and
is the standard deviation values of waveform.
The footprint signals may be weakened by many negative factors (Nie et al. Citation2014). In order to eliminate the influence of weak signals, the SNR greater than 10 was considered as an effective waveform in this study. Finally, all footprints that satisfy the condition of SNR > 10 and are fall within the study area were obtained. However, these laser footprints may locate in non-forest areas. Therefore, the ALS CHM above 2 m was further used to screen the laser footprints, to ensure that the selected data were completely located in the forest area. In this process, the range of each laser footprint covering the corresponding CHM (> 2 m) should be greater than 75% of the laser footprint.
In order to eliminate the impact of consistency analysis caused by forest heterogeneity, this study further screened the laser footprints based on the sub-compartment data. Each vector polygon in the sub-compartment data was inward buffered 30 m and considered as the constraint condition. Also, coverage of each laser footprint to the buffered sub-compartment should be greater than 75% of the laser footprint area.
Finally, 21 effective laser footprints that meet the above conditions were used to calculate the forest terrain. Among them, eight effective laser footprints with the SNR greater than 15 were further selected and used for obtaining forest height.
In this paper, the terrain height values were directly obtained from the parameter files carried by the footprints, and the forest height values were calculated from the waveform signals. Specifically, the first bin of five consecutive bins in the waveform strength that is higher than the threshold condition was used as the starting position of the waveform signal. Referring to existing research, the threshold condition was defined as three times the standard deviation of the signal background noise plus the mean value (Pang et al. Citation2006). The distance between the starting position and the ground return position of the waveform signal was taken as the canopy top height. Meanwhile, the geodetic height calculated based on the laser echoes ranging value was taken as the ground elevation value of the laser footprint.
3.2 Canopy height estimation based on stereo images
Several remote sensing software (such as ERDAS, ENVI, and PCI) can be used to do stereo image matching and provide point clouds in an automatic or semi-automatic manner. In this study, the GF-7 stereo images were processed by the NASA Ames Stereo Pipeline (ASP) which is a suite of free and open-source automated stereogrammetry tools. It can produce cartographic products, including DSMs, ortho-projected images, and bundle-adjustment networks. The ground control points are necessary in the stereoscopic processing, especially when DSMs must be used together with other data. It was difficult to collect enough Ground Control Points (GCPs) by field measurements due to steep terrains and dense forest covers in the study area. Meanwhile, ALS data can’t be used to extract the GCPs due to their limited coverage to GF-7 data and to maintain the independence of validation results. Aguilar et al. (Citation2017) reported that the GCPs collected by averaging multi-temporal very high-resolution images could achieve an error of horizontal positioning lower than 2.0 m, and several studies have reported that ICESat-2 data can obtain good vertical accuracy in bare flat areas (Carabajal and Boy Citation2020; Wang et al. Citation2019).
Therefore, 12 GCPs were extracted from multi-temporal Very High-Resolution (VHR) images in Google Earth and the ICESat-2 photons. The bundle-adjust was carried out twice. The coordinates of GCPs were first collected from Google Earth. In the second round, the horizontal coordinates (i.e. longitude and latitude) were collected on the ortho-rectified backward image of GF-7, and the vertical coordinate (i.e. elevation) was the elevation of the ICESat-2. The DSM was produced through rasterization of point cloud generated by dense matching of images using the final results of bundle-adjust, and no interpolation was used. The pixel size of point cloud was the same as image pixel size.
To demonstrate the usability of the proposed method and the GCPs for GF-7 DSM generation, the visual interpretation method combined with the ALS data was used to evaluate the horizontal and vertical positioning accuracy of ortho-rectified GF-7 image and DSM in bare ground areas. On this basis, the canopy height model was produced by subtracting LiDAR DTM from the GF-7 DSM.
3.3 Terrain and canopy height validation
The CHM obtained from ALS point clouds was utilized to build the two scale reference data and validated the canopy height calculated from stereo images of GF-7. At the plot scale, the square grids with the size of 20 m × 20 m (equivalent to the size of commonly used field sample plots) covering the research area were used to estimate statistically the average height of CHMs obtained from stereo images and ALS data. The corresponding mean height difference of each grid was calculated and used to evaluate the canopy height observed in the GF-7 stereo images. At the forest stand scale, the forest sub-compartment data considered different forest types, site conditions, and management measures. Each vector plane in the sub-compartment data was inward buffered 20 m and used to calculate the average height of the imaged-based CHM and ALS-based CHM. The purpose of making a buffer zone inward at the boundary of each forest sub-compartment aimed to reduce the impact of forest heterogeneity in adjacent forest sub-compartments on the canopy estimation results. Finally, the accuracy of the stereo image-based CHM was evaluated using the same method as the plot scale above. Significantly, at least 70% of the pixel in each statistical unit should have non-null values.
Furthermore, the average elevation of ground points and the maximum height of canopy inside the GF-7 footprints directly calculated from 3D ALS point clouds were used to evaluate the terrain height and forest height generated from spaceborne LiDAR.
Thus, the R-squared measure (R2), Root Mean Square Error (RMSE), relative bias (RBias), and Mean Absolute Error (MAE) indicating the agreement of canopy height calculated from GF-7 data and from ALS data were calculated, and the RMSE and MAE indicating the agreement of forest terrain obtained from GF-7 data and from ALS data were used. These metrics are calculated as follows:
where n was the number of height values used to calculate the accuracy in different assessment scales, and
represent the predicted and reference height values, and
is the mean height of all reference height values.
4. Results
4.1 Geolocation accuracy of the ortho-rectified GF-7 image and GF-7 DSM
To demonstrate the availability of GCPs for stereoscopic processing, we randomly selected 18 corresponding feature points in the bare ground area from the ALS data and ortho-rectified GF-7 image through visual interpretation and compared the X and Y coordinates of the feature points in different data sources, thus obtaining the horizontal accuracy of the GCPs corrected ortho-rectified GF-7 image. Furthermore, the feature points were, respectively, used to extract the pixel values in GF-7 DSM and ALS DSM and assessed the vertical positioning accuracy of the GF-7 DSM, the results are shown in . For the X, Y coordinates and elevation, RMSE of 1.68 m, 1.59 m, and 2.6 m and MAE of 2.13 m, 1.79 m, and 3.56 m were obtained through comparing the ortho-rectified GF-7 image or GF-7 DSM to ALS data. Therefore, it can be seen that the GF-7 DSM derived using the selected GCPs gives good results, which can be used to calculate the forest height.
Table 1. Positioning accuracy of ortho-rectified GF-7 image and DSM.
4.2 Validation of terrain height and canopy height estimated from GF-7 laser footprint
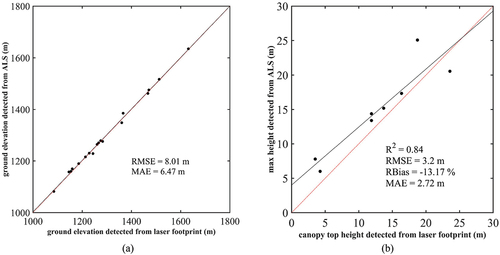
exhibits the comparison result of the terrain height and canopy height detected from GF-7 laser altimetry data and ALS data. Overall, the terrain height and forest canopy height calculated from airborne LiDAR and laser footprints have high consistency, and encouraging results were obtained although few available laser footprints were acquired, especially for the estimation of terrain height (RMSE = 8.01 m, MAE = 6.47 m). Meanwhile, R2 of 0.84, RMSE of 3.2 m, and MAE of 2.72 m were obtained between the forest top height detected from laser footprints and the maximum canopy height extracted from ALS. The RBias of the ground elevation detected from laser footprints compared to the ground elevation detected from ALS is only −0.16%, further indicating that the results obtained by the two measures are very close. By contrast, the RBias of the canopy height obtained from the two measures is −13.17%, mainly due to the significant deviation occurring in low forest areas. This also may be affected by the number of available laser footprints. With the increase in the number of obtainable data, the accuracy was likely to be further improved.
Figure 2. Comparison of results detected from laser footprint and ALS point clouds. (a) Forest terrain height and (b) forest canopy height.
4.3 Validation of canopy height estimated from GF-7 stereo images
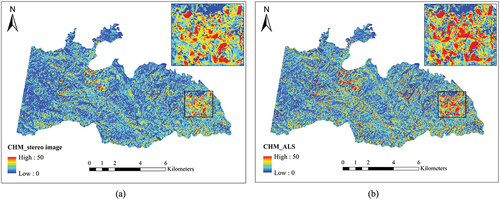
exhibits the comparison of CHMs, respectively, obtained from stereo images and ALS data of Taiyanghe Nature Reserve distributed in the yellow rectangle in . The calculated canopy height that above 50 m and below 0 m was, respectively, set to 50 m or 0 m. Finally, the average canopy height calculated from the GF-7 stereo image was 11.99 m, which was very close to the result of ALS data, i.e. 11.2 m. Two CHMs have a similar interpretation of forest height spatial distribution. Generally, forest height on the west of the Nature Reserve is relatively low. Most tall trees are distributed in the east of the Nature Reserve, and a few lofty trees are distributed in the middle. The area with tall trees is presented in detail in , which also have high consistency in spatial distribution.
Figure 3. CHM obtained from different data sources in Taiyanghe Nature Reserve. (a) GF-7 stereo images, (b) ALS data.
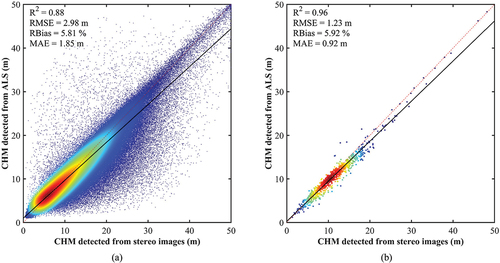
The line regression of canopy height detected from stereo images and from ALS data at different scales is displayed in . Overall, high canopy height accuracy was obtained using the stereo images of GF-7. At the plot scale, R2 of 0.88, RMSE of 2.98 m, and MAE of 1.85 m were obtained. When the results were assessed using the sub-compartment scale that can show the differences of forest site conditions, higher R2 of 0.96, lower RMSE of 1.23 m, and lower MAE of 0.92 m were obtained. Although the stereo image overestimated some of the canopy height relative to the ALS data, most of the results were distributed near the 1:1 regression line and required the RBias value of 5.81% and 5.92% at different evaluation scales.
Figure 4. Comparison result of CHM detected from stereo images and ALS data. (a) Plot scale and (b) sub-compartment scale.
5. Discussion
5.1 The potential of GF-7 satellite to estimate the forest terrain and canopy height
Compared with other satellites that can only obtain stereo images or spaceborne LiDAR data, GF-7 satellite simultaneously collects laser altimetry data and sub-meter-level stereo images, providing the possibility of high-precision continuous forest inventory and stock volume estimation (Chen, Tang, et al. Citation2022; Yu et al. Citation2022). In this study, the accuracy of GF-7 laser footprint used for forest terrain and canopy height estimation and stereo image used for forest canopy height estimation was evaluated using ALS data.
The validation result shows that there was very high correlation between the terrain height obtained from ALS and GF-7 footprints (RMSE = 8.01) (). Meanwhile, although there were only eight available laser footprints in the study area after strict screening, the accuracy of canopy height estimated from laser altimetry data was also within the acceptable range, which obtained an R2 of 0.84 and RMSE of 3.2 m (). Through in-depth analysis of the results, it can be observed that the estimation of forest height through laser footprint was greatly affected by forest terrain. When the slope of the forest ground surface at the waveform position was greater than 20°, the consistency between the forest height calculated from laser footprint and ALS was significantly worse. Therefore, it is necessary to study the effective terrain correction methods for GF-7 waveform data.
Even through laser pulses provide more information about the forest’s vertical structure than stereo-images, our results show that the stereo image method produced better results in forest height estimation than laser footprint data at almost the same scale, as shown in . This may be affected by the validation data. After rigorous screening, the number of available footprints that are used to verify the forest height measurement capability is relatively small. In comparison, the range of CHM generated from stereo images is wider, and more validation data will be generated for the entire CHM at a resolution of 20 m, resulting in stronger persuasiveness. As the distribution range and number of available footprints increase, the accuracy will be expected to be further improved. On the other hand, the horizontal positioning error of the laser footprints needs to be corrected, and their measurement accuracy for forest height is greatly affected by complex forest terrain conditions, which require effective terrain correction algorithms. In contrast, algorithms for stereo image matching are approaching maturity.
5.2 Limitations and future work
Depending on the verification results, GF-7 laser footprint can obtain high-precision surface elevation data over forests. However, the foremost goal of the GF-7 altimetry system is to obtain elevation control points and improve the stereo mapping accuracy of high-resolution optical images without ground control points (Chen, Zhang, et al. Citation2022). Therefore, although full waveform data can be obtained, the distribution of laser footprints is relatively sparse (the interval along the track is about 2.4 km, and the cross track interval is about 12.25 km). Taking this study as an example, after screening the 42 original laser footprints collected by the GF-7 satellite, the number of effective footprints that can be used to calculate terrain height and canopy height of forest was 21 and 8, respectively (), and these data can only be used for the estimation of forest parameters corresponding to the location of the laser footprints. In addition, an accurate verification results of the laser altimetry data products indicated that the horizontal positioning precision of the laser altimetry data is only about 6 m, which is theoretically lower in forest areas affected by heterogeneous surface (Chen, Tang, et al. Citation2022). Meanwhile, laser footprints are inevitably affected by forest terrain and scattering caused by clouds and aerosols (Yao et al. Citation2021). The development of robust error correction methods for reducing these impacts on the measurement accuracy is very imminently.
Furthermore, GF-7 stereo image combined with DEM data can achieve accurate estimation of forest height. However, there will be matching errors in the dense matching process of stereo images, leading to significant outliers. As shown in , some removed canopy height values obtained from stereo images are below 0 m or reach dozens or even hundreds of meters, and there were some unavoidable overestimation and underestimation points. These require further research while improving the precision of dense stereo image matching. Besides, the estimation of forest height using stereo images still requires high-precision DEM data, which limits its application in regional and even larger forest height measurements. The effective combination of laser footprints and stereo images is expected to become an effective way to solve the problem of forest height mapping in large regions.
6. Conclusion
In this study, a method to evaluate the forest terrain and canopy height estimation potential using the Chinese satellite GF-7 with spaceborne LiDAR and photogrammetry sensors was proposed. We first screened and processed the laser footprint data of Pu’er experimental area to achieve the measurement of forest terrain and top height. And then, two sets of stereo image data collected on the same orbit that covering the research area were selected and used to calculate forest canopy height in combination with the existing DEM data. Finally, results from GF-7 data were compared with the results directly extracted from ALS data. According to the verification of 21 available laser footprints, the terrain height calculated from GF-7 laser altimetry data was highly consistent with the average ground elevation obtained from ALS data (RMSE = 8.01 m). Meanwhile, although only eight effective footprints were used to validate the results, the forest top height calculated from GF-7 laser altimetry data shows good consistent with the maximum canopy height calculated from ALS data when the slope of the forest ground surface was less than 20°. The result indicates that the GF-7 laser altimetry data perform well under low-slope conditions and have great potential in the forest height estimation at laser footprint scale. Furthermore, the CHMs obtained from stereo images and from ALS data have a strong consistency in the interpretation of forest canopy height, with an R2 of 0.88 and RMSE of 2.98 m at the plot scale; furthermore, a higher R2 of 0.96 and lower RMSE of 1.23 m at the sub-compartment scale were obtained. Although affected by the errors that may propagate from data collection or preprocessing, all the regression results exhibited that the vast majority of the discrete points are around the 1:1 regression line. Therefore, GF-7 data have great application potential in estimating forest parameters and even realizing continuous inventory of forest resources.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Data availability statement
The data used in this paper are available at http://www.forestdata.cn/ after the paper is published.
Additional information
Funding
Notes on contributors
Liming Du
Liming Du received the PhD degree in cartography and geographical information systems from Capital Normal University, Beijing, China, in 2020. She is currently an Assistant Professor with the Institute of Forest Resources Information Techniques, Chinese Academy of Forestry. Her research interests include multi-sensor LiDAR integration and post-processing, application of LiDAR forest 3D structure parameters extraction, and biomass estimation.
Yong Pang
Yong Pang received the PhD degree of cartography and geographic information system from the Institute of Remote Sensing Applications, Chinese Academy of Science in 2006. He is currently a professor at the Institute of Forest Resource Information Techniques, Chinese Academy of Forestry. His research interests include LiDAR remote sensing and applications in forestry, data fusion for forest parameters estimation, forest change and carbon mapping.
Wenjian Ni
Wenjian Ni received the PhD degree in cartography and geography information system from the Graduate University of Chinese Academy of Sciences, Beijing, China, in 2009. He has been a Research Professor with the Institute of Remote Sensing and Digital Earth, Chinese Academy of Sciences, since August 2014. His research interests include measuring and modeling the radar backscattering of vegetated surface; description of a three-dimensional forest scene using terrestrial, airborne, or spaceborne laser scanner data; and algorithm exploration for the mapping of forest aboveground biomass at regional scale using multiple remote sensing data.
Xiaojun Liang
Xiaojun Liang is a currently working toward the PhD degree of forestry at Institute of Forest Resource Information Techniques, Chinese Academy of Forestry. His research interests include applications of LiDAR remote sensing in forestry.
Zengyuan Li
Zengyuan Li received the PhD degree in Grassland Science from China Agricultural University, Beijing, China, in 1990. He has been a Research Professor at the Institute of Forest Resource Information Techniques, Chinese Academy of Forestry, since 1995. His research interest is remote sensing of ecological environment.
Juan Suarez
Juan Suárez is a Higher Scientific Officer and the head of the Remote Sensing Applications Programme at Forest Research Northern Research Station, UK. He has twenty years of research experience in airborne LiDAR and hyperspectral analysis in support of the National Forest Inventory, Terrestrial Laser Scanning, and forest modelling and programming. He is currently working on the development of LiDAR-based tools (airborne and satellite) for forest inventory, modelling, and monitoring.
Wei Wei
Wei Wei received the master’s degree in silviculture from Southwest Forestry University in 2012. He is currently a Research Associate and the team leader of the Intelligent Forestry Research, Yunnan Academy of Forestry and Grassland. His research interests include LiDAR remote sensing and applications in forestry, especially the 3D structure parameters extraction.
References
- Aguilar, M. A., A. Nemmaoui, F. J. Aguilar, A. Novelli, and A. García Lorca. 2017. “Improving Georeferencing Accuracy of Very High Resolution Satellite Imagery Using Freely Available Ancillary Data at Global Coverage.” International Journal of Digital Earth 10 (10): 1055–1069. https://doi.org/10.1080/17538947.2017.1280549.
- Asner, G. P., J. Mascaro, H. C. Muller-Landau, G. Vieilledent, R. Vaudry, M. Rasamoelina, J. S. Hall, and M. Van Breugel. 2012. “A Universal Airborne LiDar Approach for Tropical Forest Carbon Mapping.” Oecologia 168 (4): 1147–1160. https://doi.org/10.1007/s00442-011-2165-z.
- Brown, S. 2002. “Measuring Carbon in Forests: Current Status and Future Challenges.” Environmental Pollution 116 (3): 363–372. https://doi.org/10.1016/S0269-7491(01)00212-3.
- Carabajal, C. C., and J.-P. Boy. 2020. “ICESat-2 Altimetry as Geodetic Control.” The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 1299–1306. Nice City, France. https://doi.org/10.5194/isprs-archives-XLIII-B3-2020-1299-2020.
- Chen, J., X. Tang, Y. Xue, G. Li, X. Zhou, L. Hu, and S. Zhang. 2022. “Registration and Combined Adjustment for the Laser Altimetry Data and High-Resolution Optical Stereo Images of the GF-7 Satellite.” Remote Sensing 14 (7): 1666. https://doi.org/10.3390/rs14071666.
- Chen, J., B. Zhang, X. Tang, G. Li, X. Zhou, L. Hu, and X. Dou. 2022. “On-Orbit Geometric Calibration and Accuracy Validation for Laser Footprint Cameras of GF-7 Satellite.” Remote Sensing 14 (6): 1408. https://doi.org/10.3390/rs14061408.
- Coops, N. C., P. Tompalski, T. R. H. Goodbody, M. Queinnec, J. E. Luther, D. K. Bolton, J. C. White, M. A. Wulder, O. R. Van Lier, and T. Hermosilla. 2021. “Modelling Lidar-Derived Estimates of Forest Attributes Over Space and Time: A Review of Approaches and Future Trends.” Remote Sensing of Environment 260:112477. https://doi.org/10.1016/j.rse.2021.112477.
- Dalagnol, R., F. H. Wagner, T. Emilio, A. S. Streher, L. S. Galvão, J. P. H. B. Ometto, and L. E. O. C. Aragão. 2022. “Canopy Palm Cover Across the Brazilian Amazon Forests Mapped with Airborne LiDar Data and Deep Learning. Ed. Mat Disney and Doreen Boyd.” Remote Sensing in Ecology and Conservation 8 (5): 601–614. https://doi.org/10.1002/rse2.264.
- Dixon, R. K., A. M. Solomon, S. Brown, R. A. Houghton, M. C. Trexier, and J. Wisniewski. 1994. “Carbon Pools and Flux of Global Forest Ecosystems.” Science 263 (5144): 185–190. https://doi.org/10.1126/science.263.5144.185.
- Duncanson, L., A. Neuenschwander, S. Hancock, N. Thomas, T. Fatoyinbo, M. Simard, C. A. Silva, et al. 2020. “Biomass Estimation from Simulated GEDI, ICESat-2 and NISAR Across Environmental Gradients in Sonoma County, California.” Remote Sensing of Environment 242:111779. https://doi.org/10.1016/j.rse.2020.111779.
- Fayad, I., N. Baghdadi, J. S. Bailly, F. Frappart, and M. Zribi. 2020. “Analysis of GEDI Elevation Data Accuracy for Inland Waterbodies Altimetry.” Remote Sensing 12 (17): 2714. https://doi.org/10.3390/rs12172714.
- Goetz, S., and R. Dubayah. 2011. “Advances in Remote Sensing Technology and Implications for Measuring and Monitoring Forest Carbon Stocks and Change.” Carbon Management 2 (3): 231–244. https://doi.org/10.4155/cmt.11.18.
- Goldbergs, G., S. W. Maier, S. R. Levick, and A. Edwards. 2019. “Limitations of High Resolution Satellite Stereo Imagery for Estimating Canopy Height in Australian Tropical Savannas.” International Journal of Applied Earth Observation and Geo-Information 75:83–95. https://doi.org/10.1016/j.jag.2018.10.021.
- Hancock, S., J. Armston, M. Hofton, X. Sun, H. Tang, L. I. Duncanson, J. R. Kellner, and R. Dubayah. 2019. “The GEDI Simulator: A Large‐Footprint Waveform Lidar Simulator for Calibration and Validation of Spaceborne Missions.” Earth & Space Science 6 (2): 294–310. https://doi.org/10.1029/2018EA000506.
- Hyyppä, J., H. Hyyppä, D. Leckie, F. Gougeon, X. Yu, and M. Maltamo. 2008. “Review of Methods of Small‐Footprint Airborne Laser Scanning for Extracting Forest Inventory Data in Boreal Forests.” International Journal of Remote Sensing 29 (5): 1339–1366. https://doi.org/10.1080/01431160701736489.
- Korhonen, L., K. Korhonen, M. Rautiainen, and P. Stenberg. 2006. “Estimation of Forest Canopy Cover: A Comparison of Field Measurement Techniques.” Silva Fennica 40 (4): 577–588. https://doi.org/10.14214/sf.315.
- Lefsky, M. A. 2010. “A Global Forest Canopy Height Map from the Moderate Resolution Imaging Spectroradiometer and the Geoscience Laser Altimeter System.” Geophysical Research Letters 37 (15). https://doi.org/10.1029/2010GL043622.
- Li, D., M. Wang, and J. Jiang. 2021. “China’s High-Resolution Optical Remote Sensing Satellites and Their Mapping Applications.” Geo-Spatial Information Science 24 (1): 85–94. https://doi.org/10.1080/10095020.2020.1838957.
- Liu, M., C. Cao, W. Chen, and X. Wang. 2019. “Mapping Canopy Heights of Poplar Plantations in Plain Areas Using ZY3-02 Stereo and Multispectral Data.” ISPRS International Journal of Geo-Information 8 (3): 106. https://doi.org/10.3390/ijgi8030106.
- Liu, Q., Z. Li, S. Li, W. Zhang, and J. Zhu. 2022. “Estimation of Coniferous Forest Height Using Stereo Images of GF-7 Satellite and Airborne Lidar Data.” The Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, 5913–5916. Kuala Lumpur City, Malaysia, July 18. https://doi.org/10.1109/igass46834.2022.9884917.
- Liu, X., Y. Su, T. Hu, Q. Yang, B. Liu, Y. Deng, H. Tang, Z. Tang, J. Fang, and Q. Guo. 2022. “Neural Network Guided Interpolation for Mapping Canopy Height of China’s Forests by Integrating GEDI and ICESat-2 Data.” Remote Sensing of Environment 269:112844. https://doi.org/10.1016/j.rse.2021.112844.
- Lovell, J. L., D. L. B. Jupp, G. J. Newnham, N. C. Coops, and D. S. Culvenor. 2005. “Simulation Study for Finding Optimal Lidar Acquisition Parameters for Forest Height Retrieval.” Forest Ecology and Management 214 (1–3): 398–412. https://doi.org/10.1016/j.foreco.2004.07.077.
- Montesano, P. M., C. S. R. Neigh, W. Wagner, M. Wooten, and B. D. Cook. 2019. “Boreal Canopy Surfaces from Spaceborne Stereogrammetry.” Remote Sensing of Environment 225:148–159. https://doi.org/10.1016/j.rse.2019.02.012.
- Nandy, S., R. Srinet, and H. Padalia. 2021. “Mapping Forest Height and Aboveground Biomass by Integrating ICESat‐2, Sentinel‐1 and Sentinel‐2 Data Using Random Forest Algorithm in Northwest Himalayan Foothills of India.” Geophysical Research Letters 48 (14): e2021GL093799. https://doi.org/10.1029/2021GL093799.
- Neigh, C., J. Masek, P. Bourget, B. Cook, C. Huang, K. Rishmawi, and F. Zhao. 2014. “Deciphering the Precision of Stereo IKONOS Canopy Height Models for US Forests with G-LiHT Airborne LiDAR.” Remote Sensing 6 (3): 1762–1782. https://doi.org/10.3390/rs6031762.
- Ni, W., K. J. Ranson, Z. Zhang, and G. Sun. 2014. “Features of Point Clouds Synthesized from Multi-View ALOS/PRISM Data and Comparisons with LiDAR Data in Forested Areas.” Remote Sensing of Environment 149:47–57. https://doi.org/10.1016/j.rse.2014.04.001.
- Ni, W., G. Sun, and K. J. Ranson. 2015. “Characterization of ASTER GDEM Elevation Data Over Vegetated Area Compared with Lidar Data.” International Journal of Digital Earth 8 (3): 198–211. https://doi.org/10.1080/17538947.2013.861025.
- Ni, W., Z. Zhang, and G. Sun. 2021. “Assessment of Slope-Adaptive Metrics of GEDI Waveforms for Estimations of Forest Aboveground Biomass Over Mountainous Areas.” Journal of Remote Sensing 9805364. https://doi.org/10.34133/2021/9805364.
- Nie, S., C. Wang, G. Li, F. Pan, X. Xi, and S. Luo. 2014. “Signal-To-Noise Ratio–Based Quality Assessment Method for ICESat/GLAS Waveform Data.” Optical Engineering 53 (10): 103104. https://doi.org/10.1117/1.OE.53.10.103104.
- Pan, Y., R. A. Birdsey, J. Fang, R. Houghton, P. E. Kauppi, W. A. Kurz, O. L. Phillips, et al. 2011. “A Large and Persistent Carbon Sink in the World’s Forests.” Science 333 (6045): 988–993. https://doi.org/10.1126/science.1201609.
- Pang, Y., W. Jia, X. Qin, L. Si, X. Liang, X. Lin, and Z. Li. 2020. “Forest Fire Monitoring Using Airborne Optical Full Spectrum Remote Sensing Data.” Journal of Remote Sensing (Chinese) 24 (10): 1280–1292. https://doi.org/10.11834/jrs.20200290.
- Pang, Y., X. Yu, Z. Li, G. Sun, E. Chen, and B. Tan. 2006. “Waveform Length Extraction and Forestry Application Potential Analysis of Spaceborne Lidar.” Forestry Science 42 (7): 137–140.
- Persson, H. J., and R. Perko. 2016. “Assessment of Boreal Forest Height from WorldView-2 Satellite Stereo Images.” Remote Sensing Letters 7 (12): 1150–1159. https://doi.org/10.1080/2150704X.2016.1219424.
- Popescu, S. C., T. Zhou, R. Nelson, A. Neuenschwander, R. Sheridan, L. Narine, and K. M. Walsh. 2018. “Photon Counting LiDAR: An Adaptive Ground and Canopy Height Retrieval Algorithm for ICESat-2 Data.” Remote Sensing of Environment 208:154–170. https://doi.org/10.1016/j.rse.2018.02.019.
- Potapov, P., X. Li, A. Hernandez-Serna, A. Tyukavina, M. C. Hansen, A. Kommareddy, A. Pickens, et al. 2021. “Mapping Global Forest Canopy Height Through Integration of GEDI and Landsat Data.” Remote Sensing of Environment 253:112165. https://doi.org/10.1016/j.rse.2020.112165.
- Ren, C., J. Xie, X. Zhi, Y. Yang, and S. Yang. 2020. “Laser Spot Center Location Method for Chinese Spaceborne GF-7 Footprint Camera.” Sensors 20 (8): 2319. https://doi.org/10.3390/s20082319.
- Salas, E. A. L. 2021. “Waveform LiDar Concepts and Applications for Potential Vegetation Phenology Monitoring and Modeling: A Comprehensive Review.” Geo-Spatial Information Science 24 (2): 179–200. https://doi.org/10.1080/10095020.2020.1761763.
- Shugart, H. H., S. Saatchi, and F. G. Hall. 2010. “Importance of Structure and Its Measurement in Quantifying Function of Forest Ecosystems.” Journal of Geophysical Research: Biogeosciences 115 (G2). https://doi.org/10.1029/2009JG000993.
- Simard, M., N. Pinto, J. B. Fisher, and A. Baccini. 2011. “Mapping Forest Canopy Height Globally with Spaceborne Lidar.” Journal of Geophysical Research 116 (G4): G04021. https://doi.org/10.1029/2011JG001708.
- St‐Onge, B., Y. Hu, and C. Vega. 2008. “Mapping the Height and Above‐Ground Biomass of a Mixed Forest Using Lidar and Stereo Ikonos Images.” International Journal of Remote Sensing 29 (5): 1277–1294. https://doi.org/10.1080/01431160701736505.
- Straub, C., J. Tian, R. Seitz, and P. Reinartz. 2013. “Assessment of Cartosat-1 and WorldView-2 Stereo Imagery in Combination with a LiDAR-DTM for Timber Volume Estimation in a Highly Structured Forest in Germany.” Forestry 86 (4): 463–473. https://doi.org/10.1093/forestry/cpt017.
- Sun, G., K. Ranson, D. Kimes, J. Blair, and K. Kovacs. 2008. “Forest Vertical Structure from GLAS: An Evaluation Using LVIS and SRTM Data.” Remote Sensing of Environment 112 (1): 107–117. https://doi.org/10.1016/j.rse.2006.09.036.
- Sun, Y., S. Nie, G. Li, X. Huang, Z. Liu, C. Wang, X. Xi, and J. Yu. 2022. “Evaluation of the Performance of GaoFen-7 Laser Altimeter Data for Ground Elevation Retrieval Over Vegetated Areas.” Remote Sensing Letters 13 (10): 991–1001. https://doi.org/10.1080/2150704X.2022.2116296.
- Tinkham, W. T., P. R. Mahoney, A. T. Hudak, G. M. Domke, M. J. Falkowski, C. W. Woodall, and A. M. S. Smith. 2018. “Applications of the United States Forest Inventory and Analysis Dataset: A Review and Future Directions.” Canadian Journal of Forest Research 48 (11): 1251–1268. https://doi.org/10.1139/cjfr-2018-0196.
- Ullah, S., M. Dees, P. Datta, P. Adler, T. Saeed, M. S. Khan, and B. Koch. 2020. “Comparing the Potential of Stereo Aerial Photographs, Stereo Very High-Resolution Satellite Images, and TanDEM-X for Estimating Forest Height.” International Journal of Remote Sensing 41 (18): 6976–6992. https://doi.org/10.1080/01431161.2020.1752414.
- Vastaranta, M., M. A. Wulder, J. C. White, A. Pekkarinen, S. Tuominen, C. Ginzler, V. Kankare, M. Holopainen, J. Hyyppä, and H. Hyyppä. 2013. “Airborne Laser Scanning and Digital Stereo Imagery Measures of Forest Structure: Comparative Results and Implications to Forest Mapping and Inventory Update.” Canadian Journal of Remote Sensing 39 (5): 382–395. https://doi.org/10.5589/m13-046.
- Vatandaslar, C., O. G. Narin, and S. Abdikan. 2022. “Retrieval of Forest Height Information Using Spaceborne LiDAR Data: A Comparison of GEDI and ICESat-2 Missions for Crimean Pine (Pinus Nigra) Stands.” Trees 37 (3): 717–731. https://doi.org/10.1007/s00468-022-02378-x.
- Wang, C., X. Zhu, S. Nie, X. Xi, D. Li, W. Zheng, and S. Chen. 2019. “Ground Elevation Accuracy Verification of ICESat-2 Data: A Case Study in Alaska, USA.” Optics Express 27 (26): 38168. https://doi.org/10.1364/OE.27.038168.
- Wang, M., Y. Wei, and Y. Pi. 2023. “Geometric Positioning Integrating Optical Satellite Stereo Imagery and a Global Database of ICESat-2 Laser Control Points: A Framework and Key Technologies.” Geo-Spatial Information Science. https://doi.org/10.1080/10095020.2022.2159885.
- Xie, J., G. Huang, R. Liu, C. Zhao, J. Dai, T. Jin, F. Mo, et al. 2020. “Design and Data Processing of China’s First Spaceborne Laser Altimeter System for Earth Observation: GaoFen-7.” IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing 13:1034–1044. https://doi.org/10.1109/JSTARS.2020.2977935.
- Yao, J., X. Tang, G. Li, J. Chen, Z. Zuo, B. Ai, S. Zhang, and J. Guo. 2021. “Influence of Atmospheric Scattering on the Accuracy of Laser Altimetry of the GF-7 Satellite and Corrections.” Remote Sensing 14 (1): 129. https://doi.org/10.3390/rs14010129.
- Yu, T., Y. Pang, X. Liang, W. Jia, Y. Bai, Y. Fan, D. Chen, et al. 2022. “China’s Larch Stock Volume Estimation Using Sentinel-2 and LiDAR Data.” Geo-Spatial Information Science. https://doi.org/10.1080/10095020.2022.2105754.