
1. Introduction
There is a longstanding hypothesis stipulating that rearrangement of the spinal circuitry might have occurred during the evolution of primates, thus altering the more primitive spinal mechanisms related to locomotion (Vilensky and Larson Citation1989). Indeed, primates present a diversity of locomotor capacities including unique locomotor skills related to arboreal life. Although the muscular activity of some of these species has been studied in specific contexts such as grasping, climbing, bipedal walking, etc (e.g., Larson and Stern Citation2009), a general description of the activity pattern of limb muscles during steady quadrupedal walking remains poorly known, as well as potential links to other less usual locomotor modes.
Interestingly, based on temporal data of locomotion, it has been suggested that the same basic mechanism could be responsible for controlling bipedal and quadrupedal coordination in primates.
2. Methods and material
In the context of a large research program in Evolutionary Anthropology that is currently conducted at the Technical Platform of Motion Analysis of Primates (Primatology Station of the CNRS, Rousset, France), we are investigating the motor control of locomotion in primates thanks to integrative experiments. We have recorded the activity of six hindlimb muscles using sEMG (wireless Aurion system), and corresponding sagittal kinematics (spatiotemporal parameters and joint angles using video recording) for 2 subadult female baboons while they were walking quadrupedally and bipedally at different speed, on both ground (own speed) and treadmill (controlled speed). Both females had been previously trained using positive reinforcement techniques in order to desensitize the animals to the experimental setup and to the presence of the experimenters.
3. Results and discussion
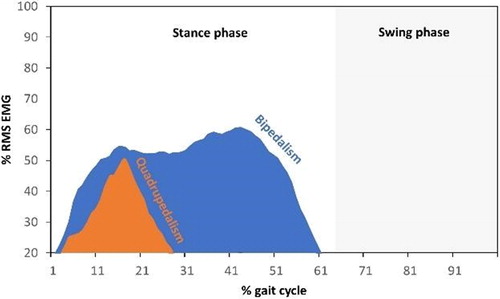
Our results show that, overall, the bursting patterns of the recorded muscles represent the same general basic function, as in other quadrupedal mammals, for protracting and retracting the hindlimb. The overall similarity observed reflects the shared basic functional demands on the hindlimbs for quadrupedal locomotion in tetrapods and suggests the conservation of an ancestral neuromotor pattern in primates. Furthermore, during bipedal walking, the muscle recruitment patterns, at the level of the onset of the burst, seem similar to that observed during quadrupedalism. For instance, the activation is generally longer in bipedal walking, what can be related to higher muscular corrective actions for balance control ().
Figure 1. Example of the % RMS EMG profile for the Gluteus Medius when walking quadrupedally (orange) and bipedally (blue). The grey square indicates the period of swing phase for the hind limb considered.
4. Conclusions
The present study suggests that an ancestral neuromotor pattern is conserved in primates and that it can be used for other less usual locomotor modes. These preliminary results support our previous findings on the development of the coordination in quadrupedal and bipedal walking in primates. The neuromotor networks used for quadrupedalism might also be employed for (occasional) bipedal locomotion.
Additional information
Funding
References
- Aerts P, Van Damme R, Van Elsacker L, Duchene V. 2000. Spatio-temporal gait characteristics of the hind-limb cycles during voluntary bipedal and quadrupedal walking in bonobos (Pan paniscus). Am J Phys Anthropol. 111(4):503–517.
- Berillon G, Daver G, D’Août K, Nicolas G, de la Villetanet B, Multon F, Digrandi G, Dubreuil G. 2010. Bipedal versus quadrupedal hind limb and foot kinematics in a captive sample of Papio anubis: setup and preliminary results. Int J Primatol. 31(2):159–180.
- Druelle F, Aerts P, Berillon G. 2017. The origin of bipedality as the result of a developmental byproduct: The case study of the olive baboon (Papio anubis). J Hum Evol. 113:155–161.
- Druelle F, Aerts P, D'Août K, Moulin V, Berillon G. 2017. Segmental morphometrics of the olive baboon (Papio anubis): a longitudinal study from birth to adulthood. J Anat. 230(6):805–819.
- Larson SG, Stern JT. 2009. Hip extensor EMG and forelimb/hind limb weight support asymmetry in primate quadrupeds. Am J Phys Anthropol. 138(3):343–355.
- Vilensky J, Larson B. 1989. Primate Locomotion: Utilization and control of symmetrical gaits. Annu Rev Anthropol. 18(1):17–35.