
1. Introduction
In spine surgery, scoliosis, herniated discs and spondylitis are currently treated by spinal fusion. However, the choice of an optimal spinal fusion level has still limitations. Indeed, no objective tool to find the most suitable surgery is available. So, surgeries are often surgeon-specific: a single patient may be advised different surgical strategies depending on surgeons.
Assessing intervertebral efforts using a multibody approach (Abedrabbo Ode Citation2017) is a promising solution to find a sufficiently objective tool for surgical planning. However, if the geometry and the kinematics of the spine’s patient are known, muscle forces acting on different levels of the spine are still unknown but crucial. Consequently, our objective is to quantify forces of abdominal and back muscles and to estimate their contribution to the quantification of intervertebral efforts. A key point in this research is to use only non-invasive surface electromyography (EMG) measurements for obvious patient safety reasons.
However, surface EMG and muscle force are not directly linked. Their relationship is complex because (i) the use of surface EMG is limited to superficial muscles; (ii) surface EMG may not represent the activity of the entire muscle; (iii) there might be more than one muscle in the recorded EMG signal (Staudenmann et al. Citation2010), muscles acting together are then referred as a ‘muscle group’; (iv) muscle dynamics is difficult to figure out; (v) EMG measurements do not consider kinematics and dynamics of the tendon. Despite those limitations, surface EMG measurements have the benefit to be non-invasive, what simplifies their use in dynamic tasks. Furthermore, if their signal cannot be directly translated into a force, the EMG ratio of abdominal and back muscles can be determined for upper body defined motions when recording the associated EMG measurements simultaneously. In this report, before studying dynamics and recording too many muscle activities, we analyzed well-defined static configurations and with few selected muscles.
2. Objectives
2.1. EMG measurements sensitivity
Our first objective is to analyze noise and sensitivity during EMG measurements. In this respect, our experimental set-up focusses on two variations: (i) the influence of EMG electrodes location on the skin and of the inter-electrode distance (IED); (ii) the use of different filters on the same EMG signal. Our objective is to maximize the quality of EMG signals used as input for the second experimental process.
2.2. EMG-force relationship
The second experimental process focusses on how EMG measurements can be used as input for a multibody model of the human trunk. First, we identify the main muscles or muscle groups acting during flexion, extension, rotation and lateral bending of the trunk. For this, the activation ratio of agonist and antagonist muscles is determined for each motion.
Second, we analyze the influence of external load conditions during tasks. The goal is to study how EMG measurements react when external loads are added and to see if these EMG can be more exploitable than simple ON-OFF indicators of muscle activity.
Finally, EMG measurements of trunk muscles are mapped to their associated forces as previously reported by Raison (Citation2009) for the arm. Results about mapping EMG measurements to forces in static postures, as carried out in this work, will be extended to dynamic tasks in a future research.
3. Methods
Twelve healthy male volunteers (six for each experimental process) were recruited. For EMG measurements sensitivity, the activity of the rectus abdominis was recorded during maximal isometric voluntary contraction. Regarding variations in EMG location and IED, four different EMG locations and two different IED were investigated. An identical filter was applied to all EMG signals. About variations in EMG analysis, three lowpass filters were applied to the same EMG signal for smoothing and three low cut-off frequencies were considered.
For trunk motions, volunteers performed six static tasks with four different external loads. The tasks were flexion, extension, rotation (right and left) and lateral bending (right and left) of the trunk and the four external loads were 5, 10, 15 and 20 kg. Trials were performed in isometric configurations () so that efforts of muscles associated to each specific movement may be reasonably isolated.
Figure 1. Left: EMG electrodes placed on back muscles. Middle: Isometric flexion test. Right: Isometric extension test. (UCLouvain, February 2019).
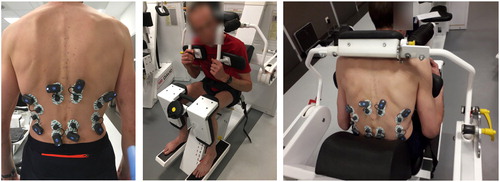
Muscle activity was recorded by EMG measurements (FreeEMG, BTS, 1000 Hz), bilaterally placed on the rectus abdominis, the external oblique muscle, the lumbar and dorsal paravertebral muscles, the latissimus dorsi and the quadratus lumborum. All muscles were recorded for all tasks to consider the co-contraction phenomenon (Granata et al. Citation2005).
To study the influence of adding external loads, a numerical regression was performed between external loads and isometric EMG measurements.
For each static posture, a multibody model of the subject in the device was developed F(q, f&’(),f*+,) = 0using the Robotran multibody program (Samin and Fisette Citation2003) to compute forces and torques, via the inverse equilibrium with q the trunk position, f&’()the muscle forces and f*+, the force applied by the external load. Each of the six tests aims at isolating at best the main effector muscle group capable of satisfying the corresponding posture. In this way, it is hoped to limit the muscle redundancy problem for each measured and modelled posture. The participation of other muscle groups is considered using appropriate weights based on EMG measurements and anatomical considerations.
4. Results and discussion
After investigation about the lowpass filters, it turned out that the most suitable was the Butterworth filter at 5th order with a cut-off frequency of 10 Hz.
As a preliminary result for EMG-force relationship, illustrates the filtered EMG signals for both right and left lumbar paravertebral muscles during the extension task obtained from the subject #1. Lumbar paravertebral muscles are the most activated muscles during the extension for both right and left sides. The EMG amplitude difference between both sides is due to the difference in skin impedance, despite having cleaned and degreased the skin with alcohol and ether.
Figure 2. EMG signals of the left and right lumbar paravertebral muscles during extension (the holding position is between 13 and 23 seconds). The peak at 10 sec is when the subject starts moving from the rest position to the static holding position.
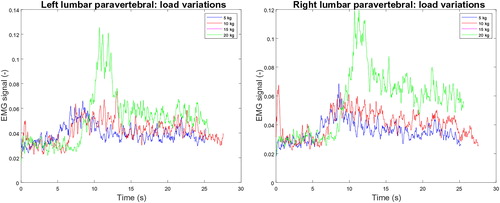
Despite the weak signal amplitude, a correlation between the holding force and EMG exists: higher loaded masses imply higher EMG responses. The influence of additional loading on EMG signals is confirmed with the root-mean-square (RMS) level computed over the holding position interval: higher RMS levels are obtained for higher masses, and their levels seem to be linearly dependent of the loading, as observed for the arm in flexion by Raison (Citation2009).
The weak signal amplitude does not allow to see any co-contraction phenomenon from the antagonist muscles. Heavier loading may be considered in future work but with the risk of discriminating subjects.
References
- Abedrabbo Ode G. 2017. Quantification of intervertebral efforts using a multibody dynamics approach: application to scoliosis [dissertation]. Université catholique de Louvain.
- Granata KP, Lee PE, Franklin TC. 2005. Cocontraction recruitment and spinal load during isometric trunk flexion and extension. Clin Biomech. 20(10):1029–1037.
- Raison M. 2009. On the quantification of joint and muscle efforts in the human body during motion [dissertation]. Université catholique de Louvain.
- Samin JC, Fisette P. 2003. Symbolic modeling of multibody systems. New York: Springer.
- Staudenmann D, Roeleveld K, Stegeman DF, van Dieën JH. 2010. Methodological aspects of SEMG recordings for force estimation: a tutorial and review. J Electromyogr Kinesiol. 20(3):375–387. 10.1016/j.jelekin.2009.08.005