
1. Introduction
Balance control is a challenge in bipedal walking, in particular in the medio-lateral (ML) plane where it is inherently unstable (Kuo Citation1999). Several balance regulation mechanisms exist (Reimann et al. Citation2018), but the foot placement remains the most effective. By focussing only on foot placement, walking can be seen as a succession of free falls occurring during single stance periods that can be controlled by adjusting the step width (SW) and single stance durations (SSD). This mechanism can be described using the dynamic properties of a simplified linear inverted pendulum model (LIP). Under this assumption a classical metrics characterizing the gait stability is the ‘margin of stability’ (MoS), i.e., the distance at toe-off between the Center of Pressure and the Extrapolated Center of Mass (XCoM), which is the CoM position with the addition of a proportion of the CoM velocity (Hof Citation2008). Negative MoS requires crossover steps to prevent lateral falls. On the opposite, too large positive MoS implies wider and faster steps, as well as higher energy cost, which highlights the interplay between stability and energetics of gait (Donelan et al. Citation2001).
The relation between MoS, SW and SSD has already been studied in various walking situations: steady state waking, perturbed walking, pathological gait, etc. However, few studies focuses on how this regulation occurs in asymmetrical gait induced by the environment (Buurke et al. Citation2018). This study aims at investigate the regulation of ML MoS in case of asymmetrical walking induced by split-belt treadmill with various belt speed ratios.
2. Methods
2.1. Experimental procedure
Seventeen young able-bodied subjects (7 Males and 10 Women, 28 ± 6 years old, 1.70 ± 0.05 m, 65 ± 5 kg, 14 right and 3 left dominant foot, as determined by the stepping foot when recovering balance after a back push) were asked to walk naturally on an instrumented split-belt (ADAL treadmill). Three different speeds were set for the dominant side belt (VD): V1=0.75m/s, V2 = 1 m/s and a self-selected comfort speed Vconf =1.41 ± 0.11 m/s. For each VD, six speeds for the non-dominant side belt (VND) were tested, resulting in six speed asymmetry ratio (100×(1-VND/VD)): 0%, 10%, 20% 30% 40% and 50%. The 0% ratio means VD and VND are identical and 50% means that VND was half of VD speed. It resulted in 3 blocks of 6 walking trials per subject. For each block, the symmetric condition was always presented first and other asymmetry ratio were presented in a randomized order. Each trial last five minutes and 30 gait cycles of the last 30 seconds were kept for analysis. This protocol has been approved by the ethical committees of the Centre de Recherche du Centre Hospitalier de l’Université de Montréal and of the École de technologie supérieure.
2.2. Measurements and data processing
Ground reaction forces (GRF) were recorded under each belt through two Kistler force-platforms and trajectories of reflective markers placed on the rear foot (calcaneus) were recorded using a six cameras VICON M460 optoelectronic system. The heel-strike and toe-off events were detected using the vertical GRF, with a threshold set at 2% of the body weight. Step width was estimated using calcaneus markers. CoM and XCoM trajectories were estimated by low-pass filtering of GRF (Hof et al. Citation2007). MoS were estimated as the ML distance between CoP and XCoM at toe-off, with positive value in the medial direction.
3. Results and discussion
displays the average MoS for each condition and both sides. It shows that MoS is dependent on the belt speed. For symmetric conditions, MoS increases on both sides while the belt velocities increase. When asymmetry ratio increases (i.e. when the non-dominant belt slows down), MoS are almost unaffected on the dominant side (small variations only for the Vconf condition) but they decrease on non-dominant side.
Figure 1. ML MoS for 3 VD and 6 asymmetry ratios. * and † indicate significant differences from the symmetrical condition (t-test, p < 0.05).
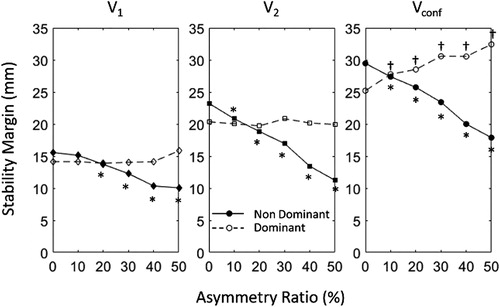
Results on spatiotemporal parameters show that changes in SSD are related to variations of belt velocities (see ), such are the MoS: SSD increases on the non-dominant side as VND decreases (between Vconf and V1 and when asymmetry ratio increases); SSD on the dominant side is almost not affected by VND. Contrary to SSD, SW remains almost unaffected: averages and standard deviation across asymmetry ratio are 139 ± 2, 138 ± 3, 136 ± 3 mm for V1, V2 and Vconf respectively.
Figure 2. Single Stance Duration (SSD) for three VD and 6 asymmetry ratios.
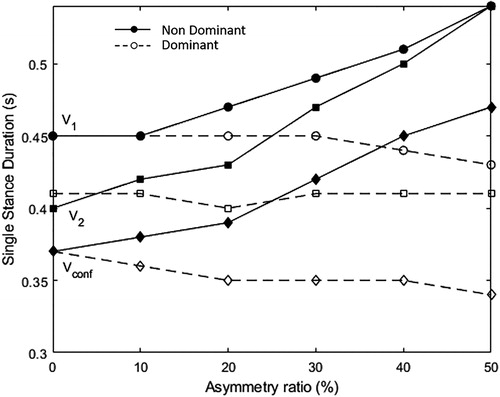
It appears from these results that MoS in asymmetric conditions are primarily related to temporal foot placement rather than spatial foot placement (SW): 1) a strong negative correlation is found between SSD and MoS (R2=0.86) while this correlation is weaker between SSD and SW (R2=0.42); 2) variations of SW are small compare to SST (variation coefficient 5 time lower). Little cross effect between legs were observed, i.e., manipulating one side has only little impact on the contralateral side. These results confirmed the recent findings from (Buurke et al. Citation2018) using a single asymmetry ratio. Moreover, this relation between SSD and MoS is consistent with the passive dynamics of the biped model used (Hof et al. Citation2007), suggesting that, in this experimental set-up where balance is not challenged, MoS are rather passive consequences of SSD adaptations, probably to decrease the energetic cost of walking (Finley et al. Citation2013). Further experiments with challenging balance situations would help unravelling the interplay between stability and energetics of gait in this type of regulation. Note that V1 and V2 could have been normalized by Vconf or the subject’s height. However, the homogeneity of the population studied (small variability in statures and Vconf) led us to think that it would only marginally influence the results of this study.
4. Conclusions
We investigated the regulation of ML MoS in asymmetric walking on a split-belt treadmill. MoS varies with the ipsilateral belt velocity. These variations could be explained by changes in SSD, while SW remained fairly constant. Results suggest that MoS variations are passive consequences to temporal gait adaptations.
Acknowledgements
This work was supported by the MENTOR program of CIHR Canada.
References
- Buurke TJW, Lamoth CJC, Vervoort D, Woude L v d, Otter R d. 2018. Adaptive control of dynamic balance in human gait on a split-belt treadmill. J Exp Biol. 221(13):174896.
- Donelan J, Kram R, Arthur D. 2001. Mechanical and metabolic determinants of the preferred step width in human walking. Proc R Soc Lond B Biol B. 268:1985–1992.
- Finley JM, Bastian AJ, Gottschall JS. 2013. Learning to be economical: the energy cost of walking tracks motor adaptation. J Physiol. 591(4):1081–1095.
- Hof AL. 2008. The ‘extrapolated center of mass’ concept suggests a simple control of balance in walking. Hum Mov Sci. 27(1):112–125.
- Hof AL, van Bockel RM, Schoppen T, Postema K. 2007. Control of lateral balance in walking: Experimental findings in normal subjects and above-knee amputees. Gait Posture. 25(2):250–258.
- Kuo AD. 1999. Stabilization of lateral motion in passive dynamic walking. Int J Robot Res. 18(9):917–930.
- Reimann H, Fettrow T, Jeka JJ. 2018. Strategies for the control of balance during locomotion. Kinesiol Rev. 1:8.