
1. Introduction
In the past two decades, neurorehabilitation has been complemented with modern robotic assisted devices, such as the Lokomat for gait training. The Lokomat is a robotic gait trainer adjustable in guidance force (GF), body weight support (BWS), and velocity. The Lokomat provides a simplified environment for training, coordination and propulsion such that even severely disabled patients can practice in an environment delivering as much challenge as desired. Previous studies have shown beneficial effects of Lokomat training on walking abilities in patients with neurologic disorders (Cherni et al. Citation2017, Citation2018). However, it is still not clear whether the Lokomat promotes naturally occurring muscle activation patterns and could be used to that purpose. Previous studies have reported contradictory results concerning this questioning (e.g., Hidler and Wall Citation2005 vs. Moreno et al. Citation2013). Moreover, no evidence exists regarding the interaction between GF and BWS settings on muscle activity and coordination. This interaction must be understood to make appropriate clinical choices during therapy.
The aim of the present study was therefore to investigate the combined effect of GF and BWS on lower limbs muscle activity and coordination when walking with a Lokomat.
2. Methods
Thirteen healthy participants (7 males and 6 females; age = 27.7 ± 4.8 years; body weight = 67.8 ± 11.2 kg; height = 174 ± 10 cm) with no neurological injuries or gait disorders volunteered to the study. Each participant walked with the Lokomat at 30, 50 and 70% of BWS and 30, 50 and 70% of GF (i.e.9 conditions) in a randomized order. Walking speed was set to 3 km/h. A reference treadmill walking condition was additionally performed out of the Lokomat 5 min after recording all the nine conditions.
Six EMG electrodes were placed on the right leg of the participants to record the activity of following muscles: (1) Rectus Femoris (RF), (2) Vastus Medialis (VM), (3) Semitendinosus (ST), (4) Gastrocnemius Medialis (GM), (5) Soleus (SOL), and (6) Tibialis Anterior (TA). EMGs were band-pass filtered between
15 and 450 Hz and then rectified. EMG envelopes were then obtained using a 4th-order low-pass Butterworth filter with a cut-off frequency of 10 Hz. Each EMG envelope was normalized by the maximum values obtained during three isometric maximal voluntary contractions.
A synergy analysis was conducted to assess the temporal and spatial structure of the muscles coordination, using non-negative matrix factorization (NNMF; Hug et al. Citation2011). NNMF iteratively factorizes the EMG matrix E into the synergy activation matrix H and the synergy weighting matrix W (E = W × H). The number of synergies in the model could be varied from 1 to 6. The reconstruction quality was assessed by means of the Variation Accounted For (VAF). The number of synergies was finally determined as the minimal value for which the lower bound of 95%-confidence interval of the total VAF was greater than 90% and the VAF for each muscle was greater than 75%. Muscle coordination complexity was assessed using the VAF value at N = 1 synergy (Steele et al. Citation2013).
Differences in EMG levels between Lokomat walking conditions and the reference treadmill conditions were tested using repeated measures ANOVA. P-values were adjusted for multiple comparisons (Bonferronni’s method). Similarity between muscle activation profiles, synergy activation profiles and synergy vectors were assessed using Pearson’s r, which was Fischer Z-transformed before statistical analysis.
3. Results and discussion
3.1. Activation signals
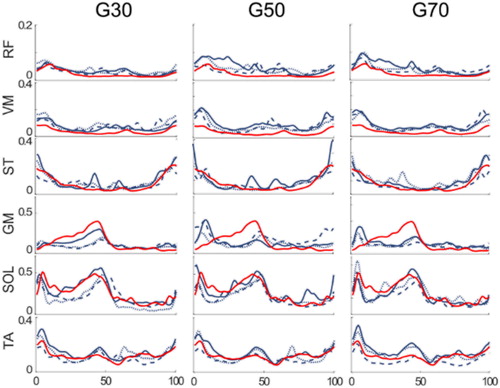
Compared to the treadmill, walking with the Lokomat altered the muscle activation patterns in some muscles (). There was typically higher muscle activation in the quadriceps muscles (e.g., RF and VM) during all Lokomat walking conditions than during treadmill walking, while there was typically less activation in the triceps surae muscles (e.g., GM and SOL) during Lokomat walking. For GM and SOL, the drop-in muscle activity may be attributable to the foot lifters placed on the participants’ forefoot, which assists ankle plantar flexion for toe clearance during swing. Differences between Lokomat and treadmill walking were negligible for ST and TA. The increase in GF led to an increase in the activity of knee extensors and plantar flexors, while increase in BWS caused a decrease in their activity. Similarity was generally low (r = 0.4–0.7) when comparing EMG patterns between Lokomat and treadmill walking. Similarity also decreased when increasing BWS for VM, ST, GM and TA (p < 0.03).
Figure 1. Average normalized muscle activation signals for different GF (30, 50 and 70) and BWS conditions during Lokomat walking (solid blue line BWS30, dotted line BWS50 and dashed line BWS70) and during treadmill walking (red line).
3.2. Muscle synergies
Complexity was not affected by the GF and BWS conditions (p > 0.05), and four synergies were required to reconstruct the EMG envelopes. This result is in agreement with previous studies (Moreno et al. Citation2013). The first synergy comprised knee and ankle flexors activation (ST and TA–), the second activated the knee extensors (VM, RF), the third the ankle plantar flexors (GM and SOL) and the fourth synergies co- activated ankle dorsi- and plantar- flexors (TA and SOL).
Figure 2. Muscle synergies during treadmill (in red) and Lokomat walking (gray scale) at different GF and BWS conditions (averages computed over all subjects). Synergy activations were normalized by their maximum before averaging.
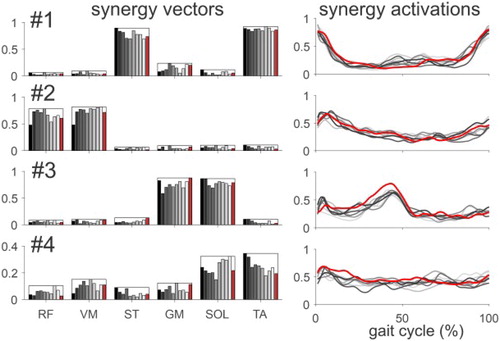
The first three synergy vectors were highly similar to those extracted during treadmill walking in all conditions (r > 0.8), while synergy 4 was not (r = 0.47 ± 0.08–). Synergy activation profiles were also similar between treadmill and Lokomat walking for synergies 1, 2 and 3 (r > 0.8) but dissimilar for synergy 4 (r = 0.56 ± 0.21).
4. Conclusions
Compared to treadmill walking, GF and BWS provided by the Lokomat altered the muscle activation patterns in terms of amplitude and timing. Their effects appeared independent to each other. The synergy analysis revealed that three-out-of four synergies were similar and recruited with similar time profiles in all GF and BWS conditions, while the fourth synergy– which likely supports and stabilizes the body during the mid-stance– was more affected by the different conditions. The Lokomat allows only a partial reproduction of the naturally occurring muscle activation patterns.
Acknowledgements
The first author is scholar of Quebec Research Fund - Nature and Technology (FRQNT).
References
- Cherni Y, Ballaz L, Girarin-Vignola G, Begon M. 2018. P 175 - Robotic-assisted locomotion training improves walking abilities in children with bilateral cerebral palsy. Gait Posture. 65:530–531.
- Cherni Y, Begon M, Chababe H, Moissenet F. 2017. Use of electromyography to optimize Lokomat(®) settings for subject-specific gait rehabilitation in post-stroke hemiparetic patients: a proof-of- concept study. Neurophysiol Clin Clin Neurophysiol. 47(4):293–299.
- Hidler JM, Wall AE. 2005. Alterations in muscle activation patterns during robotic-assisted walking. Clin Biomech Bristol Avon. 20(2):184–193.
- Hug F, Turpin NA, Couturier A, Dorel S. 2011. Consistency of muscle synergies during pedaling across different mechanical constraints. J Neurophysiol. 106(1):91–103.
- Moreno JC, Barroso F, Farina D, Gizzi L, Santos C, Molinari M, Pons JL. 2013. Effects of robotic guidance on the coordination of locomotion. J Neuroengineering Rehabil. 10(1):79.
- Steele KM, Tresch MC, Perreault EJ. 2013. The number and choice of muscles impact the results of muscle synergy analyses. Front Comput Neurosci. 7:105.