
1. Introduction
The manual wheelchair has been in use since the 17th century and has undergone many technical and ergonomic improvements. It now seems obsolete, cumbersome and stigmatizing and the daily use remains far from ergonomic. Conventional propulsion, with hand movements on the rim, causes microtrauma to the wrist and shoulder joints and makes the patient’s daily life even more difficult. Thus, the purpose of this study is to present one part (the propulsion) of a larger study focused on the design of a new type of manual wheelchair (Skendraoui et al. Citation2018).
Three main categories of manual propulsion systems can be distinguished from the literature: the classical hand-rim propulsion (Woude et al. Citation2001), the handcycling (Matthew Citation2011) and the lever propulsion (Sarraj and Massarelli Citation2011). Each manual propulsion displays both benefits and limitations. The musculoskeletal numerical analysis performed in this study aims at assessing the differences in muscular activation for two different propulsion mechanisms: the conventional hand-rim system, and the lever propulsion.
2. Methods
A numerical approach has been developed to model muscles contributions in the frame of lever propulsion. Arm movement has been modelled using AnyBodyTM software providing a full body musculoskeletal model (Bassani et al. Citation2017). The musculoskeletal model used contains all the segments of a natural humain, the shoulder girdle with all muscles and the 3 true joints sterno-clavicular joint, acromio clavicular joint and the glenohumral joint. The Dofs of this shoulder girdle are 7. There is also the arm segment with 4 DoFs, it begins below the shoulder, under the glenohumeral joint and ends above the elbow. The forearm and wrist segment (with 1 DoF), is the segment that begins below the elbow joint and is limited above the wrist joint and finally the hand segment with 2 DoFs. The model also includes the thorax (rib cage with spine to pelvis) and skull, the pelvis, the spine and the skull are fixed (no DoFs) in this study. Muscle tendons composed of physiological specificity, are constructed based on human anatomy. The arm muscle contraction rates in forward linear movement to move a wheelchair is rather a moderate contraction speed. Therefore, this analysis has no problem with accuracy. The model is a human measuring 1.8 meter with a body mass of 75 kg and a fat mass of 15%.
This numerical model has been validated, in our study, for the upper limbs using experimental results, not presented here. It is thus possible to compare the activations of various muscular groups during a propulsion stage involving lever pushing, compared to the classic hand-rim propulsion.
2.1. Hand-rim movement
This type of propulsion can be associated with different arm movement strategies, some of them involving complex patterns in the hand trajectory, to exert the propulsion force on the handrail.
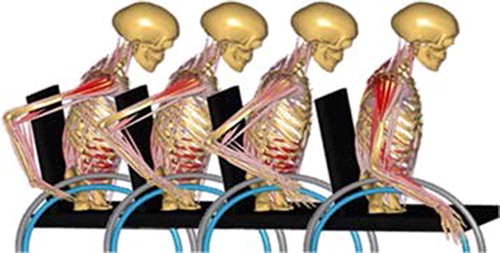
presents frames of a such movement. It is worth reminding, for instance, that the transmission of the propulsion torque using the handrail requires that each hand grasps a thin rotating surface outside the visual field. Moreover, maximum force must be exerted within a very short time interval (about 0.6 s). This propulsion mode is quite often responsible for microtrauma in the hands, wrists and shoulders (Louis Citation2010), constituting secondary physical disabilities.
Figure 1. Successive frames in the numerical simulation of the hand-rim propulsion movement.
2.2. Lever movement
Studies on wheelchairs with lever drive have shown that this propulsion system is less stressful and more effective (Matthew Citation2011). For estimated equivalent propulsion power (30 W), the gross mechanical efficiency of a lever drive is about 12%, significantly higher than that of a conventional handrail drive which is about 9%. In lever propulsion, the hands follow a cyclic movement in a sagittal plane at the subject’s stomach level, and the spatial orientation of the hand always remains in the patient’s visual field, improving motor control. Using an actuating mechanism, the force produced is indirectly transmitted to the wheel, as seen in .
Figure 2. Successive frames in the numerical simulation of the lever propulsion movement.
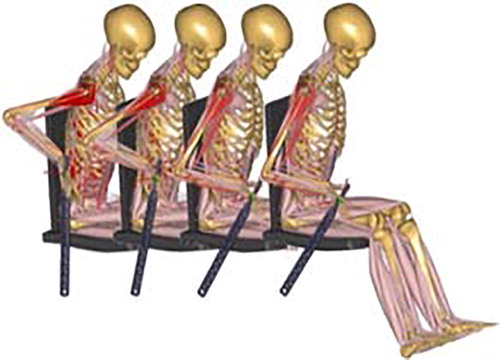
The main advantage in this technique is the continuity of movement during a cycle. Indeed, with the participation of a much larger muscle mass (i.e. bending and extension muscles), the effort is spread over a larger number of muscle groups: large dorsal, pectoral and trapezius muscles. It is assumed that they all remain permanently involved in the movement.
3. Results and discussion
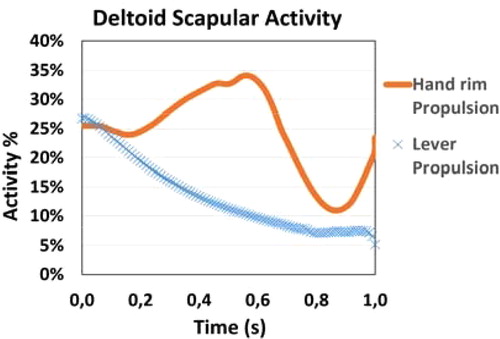
The outcome of AnyBodyTM simulation, for the lever propulsion phase, highlights significant muscular activity in the shoulder, anterior and lateral deltoid groups (). Muscle activity is observed in the triceps brachial group, long lateral triceps and major pectoralis as well. For an equal resistant load, the muscular activity decreases with the lever system. In addition, overall maximal muscle activity is lower in the case of lever propulsion (13% max activity compared to 24% for handrail).
Figure 3. Example of a numerical comparison of deltoid scapular activity between hand-rim and lever propulsion (push phase time/muscle activity converted as a percentage of the Maximum Voluntary Contraction).
Results confirm that lever drive is less traumatic since the force required to operate the wheelchair is distributed more widely over muscle groups. More precisely, physical exertion is distributed on the deltoid, triceps, brachial and flexor muscles. The major pectoral, great dorsal and trapezium muscles also remain permanently involved in the movement. The lever propulsion not only allows the prevention of secondary disabilities that can be observed among users today, but rather provides increased mobility for people with limited physical endurance - the elderly or quadriplegic subjects mostly.
4. Conclusions
This study allowed us to develop an upper limb kinematic model that quantifies the activity of the main muscular groups involved in the movement of wheelchair propulsion by lever. It has allowed us to numerically confirm that the lever propulsion system is rather less traumatically for the user than the hand-rim system. The final purpose of this work is to develop a new type of manual wheelchair with an enhanced propulsion system (a lever system propulsion), but also with features aimed at improving ergonomics. Among others, an integrated seat system will allow the patient to stand up in seated position.
Additional information
Funding
References
- Bassani T, Stucovitz E, Qian Z, Briguglio M, Galbuser F. 2017. Validation of the AnyBody full body musculoskeletal model incomputing lumbar spine loads at L4L5 level. J Biomech. 58:89–96.
- Louis N. 2010. Analyse biomécanique de la propulsion en fauteuil roulant à mains courantes: indices d’évaluation ergonomique. Toulon, France: Université de Toulon.
- Matthew CR. 2011. Comparison of four manual wheelchair designs [Thesis]. Salt Lake City, Utah: University of Utah.
- Sarraj AR, Massarelli R. 2011. Design history and advantages of a new lever-propelled wheelchair prototype. Int J Adv Robot Syst. 8(3):12–21.
- Skendraoui N, Bogard F, Murer S, Ahram T, Taiar R. 2018. Optimization and ergonomics of novel modular wheelchair design. In: Rebelo F, Soares M, editors. Advances in ergonomics in design. Cham: Springer; p. 479–487.
- Woude LH, Dallmeijer AJ, Janssen TW, Veeger D. 2001. Alternative modes of manual wheelchair ambulation: an overview. Am J Phys Med Rehabil. 80(10):765–777.