
1. Introduction
Recent advances in mechatronics and robotics have led to the production of prostheses with a growing number of active degrees of freedom (DoFs). Unfortunately, the gap is growing between this improved hardware and their still counter-intuitive, sequential and limited myoelectric control (Cordella et al. Citation2016). To overcome some of these control limitations, there is a renewal of interest in using movements rather than electrophysiological signals as control inputs. Among those movement-based control approaches, some aim to create a more intuitive control by using the motion of the residual limb and body to predict and automatize partly the movement of the prosthesis (Mijovic et al. Citation2008).
We thus here propose to use Radial Basis Function Networks (RBFN) to estimate flexion/extension prosthetic elbow movements from the residual shoulder angular movements, measured with embedded Inertial Measurement Units (IMUs). The performance of this control model was assessed with an experimental evaluation with 3 transhumeral amputated participants who used this automatically driven elbow prosthesis (and a generic myoelectric control for comparison) to perform reaching tasks. The automatic control mode relied on a generic model of the shoulder-elbow coordination which was built from data obtained from a group of healthy subjects. Several metrics were thus to illustrate the possibilities and present limitations of such control approaches.
2. Methods
2.1. Participants
Three participants (male, aged between 34 and 41) with a transhumeral amputation were recruited at the IRR of Nancy. The inclusion criteria were a good residual limb mobility, absence of pain, and no brachial plexus damage, along with past experience with myoelectric control. This work was carried out in accordance with the recommendations of the Université Paris Descartes ethic committee CERES. All subjects gave written informed consent in accordance with the Declaration of Helsinki.
2.2. Prosthesis prototype and associated controls
A prototype was built based on a modified E-TWO electric elbow (Hosmer, Fillauer©), fitted a polydigital hand (not active during the experiments). A Raspberry Pi 3 was used to read sensors, control the dedicated motor controller in charge of elbow’s motor speed closed-loop control. The prosthesis prototype was mounted onto the subject’s own socket, and their two myoelectric electrodes (Myobock, Ottobock©), located within their prosthesis socket over the residual biceps and triceps, were connected to the prosthesis controller, which also read the data from two IMUs (x-IO Technologies©), piloted the prosthetic joints according to the input signals and the control mode. Two different control laws were implemented on the prototype: an automatic coordination-based control (A-mode) and a generic myoelectric control (ME-mode). The A-mode was built, thanks to a Radial Basis Function Network (RBFN) model, that approximates the relationship between the elbow angular velocity and the time derivatives of the three Euler angles describing the orientation of the arm with respect to the trunk (see (Legrand et al. Citation2018) for a more detailed description on the building of the model). The RBFN model was trained with 14 healthy individuals’ data who performed the same protocol but only wearing IMUs.
2.3. Experimental setup and protocol
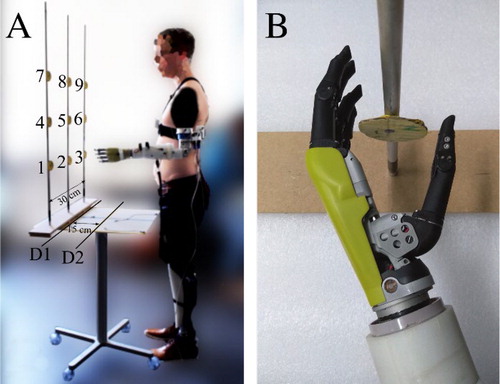
Amputated participants were fitted with the prosthesis prototype with the hand placed in a semi-opened posture and a fixed orientation (semi pronated). They were asked to reach the different targets by trying to place the prosthetic hand around the different 18 targets (as shown in ). The initial position was defined with the prosthetic elbow flexed at 90°, as shown in . No instruction was given to the subjects concerning movement duration, speed or precision. Movement end was automatically detected with a velocity threshold. The participants performed the task once with each control mode.
Figure 1. Experimental setup. (a) participant standing in the initial position. 9 targets are shown for 2 distances (D1, D2). (b) Hand position with respect to the target when successfully reaching a target.
3. Results and discussion
As detailed below, the A-mode, while appreciated by all participants, lead to trunk and upper-limb movement strategies that appeared more “natural”, i.e., more similar to the reaching movements made by healthy individuals. All averaged (over targets and participants) results are reported in .
Table 1. Averaged results of the experiment.
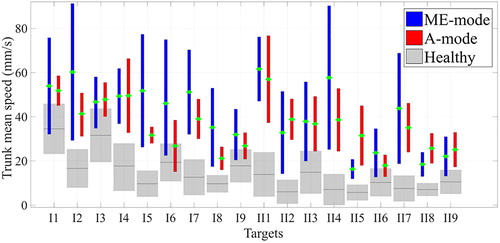
The participants could reach the targets with both modes with similar reaching precision errors. The reaching gestures performed with a prosthesis were longer than healthy movements but the movement duration was reduced when using the A-mode. Similarly, the A-mode restored larger range of use of the elbow joint, as a healthy subject would do, but generated a slight overuse of the shoulder elevation (but without reaching uncomfortable postures) possibly to compensate for over-extension generated by the A-mode in some targets. Some reduction of the trunk compensation in the sagittal plane was observed for most targets (except for some of D2) in all the participants, as shown in and . A-mode also seemed to lead to a reduced deviation of the trunk compared to ME-mode.
Figure 2. Trunk’s displacements in the sagittal plane, normalized with the completion time. Bars = the mean values (short green line) +/– the STD value.
4. Conclusions
Three transhumeral amputated individuals achieved a reaching task with a prosthetic elbow prototype driven by a generic model of the inter-joint coordination built from a combination of healthy individuals’ data. For comparison, the participants performed the reaching task with a conventional dual-site myoelectric elbow control mode, and with the automatic elbow control mode. The results showed that in addition to reach the targets with both control modes, the trunk movements were reduced in numerous targets and a more natural elbow use was restored with the A-mode. Hence, while some challenges remain to be solved, this study showed that reaching targets with an automatically-driven elbow was possible, and that it was beneficial to the users: the compensatory strategies and the required cognitive load (yet only verbally reported by participants) were reduced, and simultaneous elbow and end-effector control could be possible.
Additional information
Funding
References
- Cordella F, Ciancio A. L, Sacchetti R, Davalli A, Cutti A. G, Guglielmelli E, Zollo L. 2016. Literature review on needs of upper limb prosthesis users. Front Neurosci. 10:209.
- Legrand M, de Montalivet E, Merad M, Jarrasse N, Roby-Brami A. 2018. Movement-based control for upper-limb prosthetics. Front Neurorobot. 12:41.
- Mijovic B, Popovic M.B, Popovic D.B. 2008. Synergistic control of forearm based on accelerometer data and artificial neural networks. Braz J Med Biol Res. 41(5):389–397.