
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.1. Introduction
As running continues to grow in popularity, so does the interest in research and assessment of running gait. The dramatic increase in the number of recreational and competitive runners in recent years has obvious implications to health professionals. Current research aims at estimating activity-related parameters. In particular, the assessment of temporal and spatial gait parameters, the detection of gait phases and the discrimination of different gait activities (e.g. walking, jogging, stair climbing) have been investigated. However, gait phase detection and discrimination are investigated separately.
Our goal is to compare treadmill running foot strike pattern using a force measuring platform (included directly in the instrumented treadmill) and gyroscopes for possible similarities/differences in gait analysis and leg joint kinematics. We hypothesized that despite using different tools to analyze running patterns we would be able to reach the same end result and conclusion.
2. Methods
2.1. Participants
Twelve male runners who were free from musculoskeletal injury volunteered to take part in this study. The runners had a mean age of 30.3 (±4.9) years, stature 178.3 (±5.7) cm, and body mass 77.7 (±8.5) kg respectively. Participants were active recreational runners engaging in training at least two times per week whilst completing a minimum of 20 km per week and had previous experience of treadmill running. Participants encompassed a range of foot strike characteristics.
An a priori power analysis was conducted using the Hopkins method based on a moderate effect size and a power measure of 80%, which suggested that 12 subjects were adequate for the design. The study was approved by the University of Reims Champagne-Ardennes and the Alleray-Labrouste clinic. All participants provided a written informed consent.
2.2. Material
A commercial ForceDistribution Measurement Treadmill (FDM-T, Zebris®, Germany) with an appropriate conveyor belt (1500 mm long × 500 mm wide) was used. The driving system provides a range from 0 to 22 kmh−1 (by minimum increments of 0.1 kmh−1). For a treading area of 150 x 50 cm the sensor unit has more than 5,000 capacitive pressure/force sensors. Using a specific ergometer treadmill design the movement of the treadmill is compensated so that completely stable gait and roll off patterns can be analyzed.
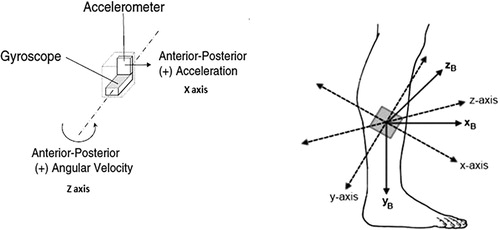
One inertial sensor (HIKOB FOX®) was used which contained a tri-axial accelerometer with a sample rate ranging from 0 Hz to 1.3 kHz. Research has indicated that the distal anteromedial portion of the tibia is chosen as a placement site to reduce the effect of angular acceleration and rotational movement. The MEMS gyroscope was placed on the skin using adhesive strapping band ().
Figure 1. MEMS placement.
2.3. Procedures
Participants were given a 5 minutes’ adaptation period, in which participants ran at the determined velocity of 3.3 ms−1. The treadmill was then stopped for 30 s and participants dismounted the treadmill before mounting the treadmill for data recording. When participants indicated that they were ready to begin, the treadmill was restarted and the velocity of the belt was gradually increased until the speed reached 2.2 ms−1 for a first recording of 30 s then the speed was again increased to reach 3.3 ms−1 for a second recording of 30 s. Each participant performed a trial shod and a trial barefoot. During both trials the accelerometer placed on the distal anteromedial portion of the tibia collects the data on the 3 axis acceleration measure.
3. Results
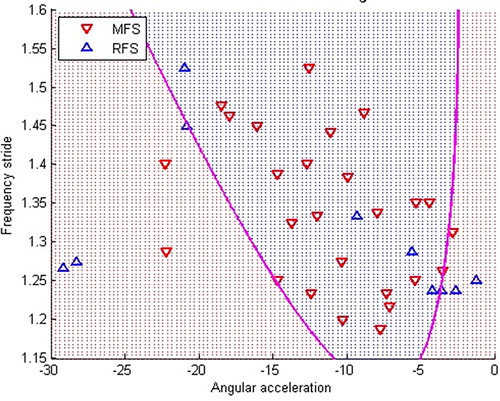
For this comparative study of the qualitative and quantitative data we have used Support Vector Machine model using kernel method. This class of algorithms is particularly used for pattern analysis, it enables us to study and compare general types of relations within the foot strike patterns. We used the foot strike classification as follow: rearfoot strike (RFS), midfoot strike (MFS) and forefoot strike (FFS).
A single gyroscope on the shank segment can provide information on segment inclination range, cadence, number of steps, and an estimation of stride length and walking speed. It has not yet been used to identify foot strike patterns. Joint angles are commonly used in gait analysis and can be derived by the integration of angular acceleration or angular velocity. However, data obtained from integration can be distorted by offsets or any drifts. According to Tong and Granat (Citation1999), gyroscopes can theoretically be used to calculate the segment inclination and the relative joint angle. Using gyroscopes, it is possible to discriminate different activities and in addition provide angular information. A system using a gyroscope on the shank provides rich information for gait analysis. A high pass filter to correct any drift and offset, inclination derived from the gyroscope signal is used to calculate the segment inclination range, cadence, number of steps taken and foot strike patterns. The pattern on the shank showed two minima, one occurs when foot flat and the other occurs when toe off. There were also two peaks in this pattern. The large one occurred during mid-swing and the small one occurred at heel off. This pattern provides information that can be used to identify different gait events and may be useful for developing control systems (Tom and Novacheck Citation1998; Dierick et al. Citation2004; Begg et al. Citation2005) ().
Figure 2. Classification using Kernel method and results correlation.
4. Conclusions
The purpose of this research was to determine the agreement between a single inertial sensor and an accepted method to measure running gait specifically foot strike pattern and whether this agreement varies with increasing velocity and whether is shod or barefoot. Agreement for most of the data were 80.6%, coupled with small bias and very large to nearly perfect correlations demonstrate strong agreement between both methods. The 19.4% margin of error could be linked to the placement of the MEMS gyroscope and the way it was attached. Although biomechanical testing has confirmed the validity and reliability of accelerometers in the measurement of accelerations within the frequency and amplitude range of human body motion, evidence indicates that they are sensitive to the site and method of attachment, also faster velocity studies found up to 7% error in step identification. In conclusion this study found strong correlation between a single inertial sensor positioned on the tibia and an instrumented treadmill for foot strike pattern classification. Using several MEMS gyroscope (foot, shin and sacrum) could probably reduce the margin of error.
References
- Begg RK, Palaniswami M, Owen B. 2005. Zupport vector machines for automated gait classification. IEEE Trans Biomed Eng. 52(5):828–883.
- Dierick F, Penta M, Renaut D, Detrembleur C. 2004. A force measuring treadmill in clinical gait analysis. Gait Post. 20(3):299–303.
- Tom N, Novacheck T. 1998. The biomechanics of running. Gait Post. 7:77–95.
- Tong K, Granat MH. 1999. A practical gait analysis system using gyroscopes. Med Eng Phys. 21(2):87–94.