
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.1. Introduction
In the context of rehabilitation of people with amputation, gait analysis provides information about gait alterations. In that perspective, the body center of mass (BCoM) trajectory, or its derivatives, can be used to describe how the whole body moves (Cavagna and Kaneko Citation1977). It is generally obtained using force plates or an optical motion capture system (OMC). However, these instruments are constrained to laboratory use.
Magneto-Inertial measurement units (MIMUs) are wearable sensors that allow BCoM kinematics assessment in every-day life conditions (Pavei et al. 2020): first, the BCoM acceleration can be obtained from a weighted average of segments’ center of mass (sCoM) accelerations, using MIMUs located on the segments, and then, the BCoM trajectory is estimated by integration of the obtained acceleration. Finding a balance between a limited number of sensors and good accuracy is crucial. In this respect, Shahabpoor et al. (Citation2018) recently proposed a method to select a reduced number of MIMUs for the estimation of the 3 D BCoM acceleration. However, the methodology was not applied in people with lower-limb amputation.
This study aims at filling this gap. First, the most appropriate segments to include in the model are identified, then the accuracy of models based on different combinations of these segments was assessed using OMC data.
2. Methods
2.1. Experimental method
The study was approved by the local ethical committee and 8 transfemoral amputees (6 males, 2 females, age: 40.8 ± 12.6 years, mass: 70.8 ± 17.5 kg) gave their written informed consent to participate in the study. According to the methodology reported in Al Abiad et al. (Citation2020), the 3 D trajectory of 59 reflective markers located on patients’ anatomical landmarks were acquired with OMC during walking, and combined with static EOS-based biplanar x-rays acquisition.
2.2. Data processing
A 15-segments hybrid inertial model constructed according to Al Abiad et al. (Citation2020), was used to obtain sCoM inertial parameters. sCoM accelerations were obtained from OMC, and reference BCoM acceleration was obtained using the abovementioned inertial model. The contribution of each segment in the BCoM acceleration was defined as the acceleration of the sCoM, weighted by the relative mass of the segment in the body (1):
(1)
(1)
Then, for each subject, Pearson’s cross-correlations of sCoM accelerations were computed for each pair of segments and between each sCoM and BCoM accelerations over a complete gait cycle, for the anteroposterior (AP), mediolateral (ML) and vertical (V) directions. For each direction, the cross-correlation matrices were averaged over all subjects. These steps allowed to define the most relevant contributing segments to the BCoM acceleration to construct a MIMUs-based experimental model with a minimal number of segments (MiNuM model). The mass of the non-selected segments was attributed to the main contributors based on sCoM accelerations cross-correlations (Shahabpoor et al. Citation2018).
MiNuM models were validated against the reference BCoM using a leave-one-out methodology. Reference and MiNuM-based BCoM accelerations were compared over the central prosthetic gait cycle of each trial using Pearson’s correlation coefficients and peak-to-peak normalized root-mean square errors (NRMSE), averaged over all patients.
3. Results and discussion
A total of 22 gait cycles were analysed for the 8 participants. Trunk, pelvis, both thighs and both feet were considered as the best sensor locations to be considered ().
Figure 1. Segmental contributions to the total BCoM acceleration (normalized by peak to peak acceleration) in AP (1a), V (1 b) and ML (1c) obtained with OMC over a gait cycle (% of cycle).
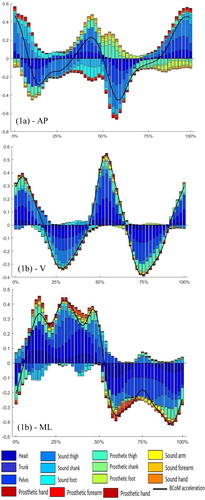
Finally, different MiNuM models were built (see ‘Segment included’ column in ). Leave-one-out validation results are summarized in . The optimal MiNuM model for transfemoral amputees is based on 5 segments, i.e., trunk, both thighs and both feet. Indeed, it presented results similar to improved compared to those presented in Shahabpoor et al. (Citation2018) in healthy subjects using the 3-sensor configuration (16%, 7%, 18% in AP, V, ML respectively) and provided a good compromise between accuracy and reduced number of sensors.
Table 1. Mean ± standard deviation of NRMSE and Pearson’s correlations (R) of the estimated 3 D BCoM acceleration of the patients excluded in the leave-one-out validation of the MiNuM models.
4. Conclusions
This study allowed to obtain insight on the best location of sensors for 3 D BCoM acceleration estimation in people with transfemoral amputation. It is worth to underline that the achieved results rely on the localization of sCoM using EOS imaging and were obtained using acceleration data derived from OMC markers. When using MIMUs, one may be confronted with additional sources of errors such as soft-tissue artefacts that could affect the obtained results. Therefore, the accuracy obtained using actual MIMUs as well as methodologies to correctly identify MIMU positions relative to the sCoM represent research tracks of interest.
References
- Al Abiad N, Pillet H, Watier B. 2020. A mechanical descriptor of instability in human locomotion: Experimental findings in control subjects and people with transfemoral amputation. Appl Sci (Switzerland). 10(3):840.
- Cavagna GA, Kaneko M. 1977. Mechanical work and efficiency in level walking and running. The Journal of Physiology. 268(2):467–481.
- Pavei G, Salis F, Cereatti A, Bergamini E. 2020. Body center of mass trajectory and mechanical energy using inertial sensors: a feasible stride? Gait & Posture. 74:28.
- Shahabpoor E, Pavic A, Brownjohn JMW, Billings SA, Guo LZ, Bocian M. 2018. Real-life measurement of tri-axial walking ground reaction forces using optimal network of wearable inertial measurement units. IEEE Trans Neural Syst Rehabil Eng. 26(6):1243–1253.