
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.1. Introduction
Microprocessor controlled prosthesis improves the functional outcome of people with above knee amputation but some limitations remain during slope and stairs ambulation. The control strategies described in the literature to adapt to these situations are mainly developed for active prostheses (Ferreira et al. Citation2016) and thus require energy supply at the knee to be performed. Hence, they cannot be transferred on microprocessor controlled passive prostheses, which are used by most people with lower limb amputation. Besides, during downhill ambulation, there is no need for added energy and a passive device with an appropriate control strategy could enhance functional and biomechanical outcomes. To the authors’ knowledge, only one study investigated the effect of a new control strategy for a passive knee prosthesis, but this strategy was not fully described (Bell et al. Citation2016).
In this paper, we present a control strategy for downhill slope ambulation using a passive microprocessor controlled prosthesis (Dauriac et al. Citation2017) and report preliminary results on the biomechanical outcomes.
2. Methods
2.1. Control strategy
The prosthesis used in this study was the microprocessor controlled prosthetic knee ankle system presented in (Dauriac et al. Citation2017). Stance to swing transition also called swing release is performed when the following set of conditions from the built-in sensors of the prosthesis is met: i) knee in extension, ii) forward movement of the tibia, iii) ankle moment () above a threshold
This strategy is hereafter referred to as SR1 ().
Figure 1. (A) Simplified state machine managing the comportment of the prosthesis. (B) Asymptomatic subject standing on the prosthesis using the orthosis.
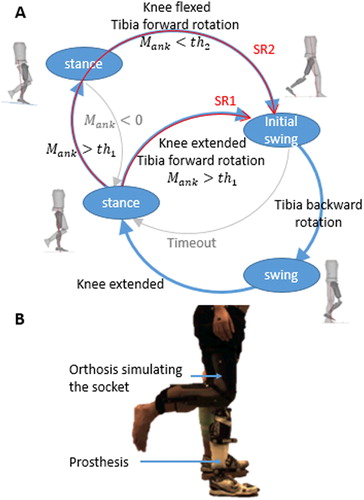
Consequently, during downhill ambulation, which is performed with the knee flexed during stance, the swing release is not allowed and the prosthesis user must force the knee flexion to obtain sufficient toe clearance during the swing.
In this paper, to overcome this limit, we propose the following sequence, hereafter referred to as SR2: ankle moment above a threshold then i) knee in flexion, ii) forward movement of the tibia iii) ankle moment below a threshold
().
2.2. Subject and trials
One asymptomatic subject was equipped with an orthosis, which simulates the socket of the prosthesis to test prosthetic knees (). He was asked to walk down a 5% slope at his self-selected speed in 5 different cases summarized in .
Table 1. Cases considered in this study.
The threshold is hand tuned so that it is close to the maximum moment observed during normal level ground walking at self-selected speed.
Motion capture was performed using a 10 cameras optoelectronic system (VICON®) and 2 force plates (AMTI®). The subject was equipped with a full body marker set and data were treated using Matlab software (Mathwork®) to obtain articular angles, moments and powers as in Pillet et al. (Citation2014). The subject walked in each condition until force plate data were obtained for at least 5 gait cycles of both legs.
3. Results and discussion
3.1. Results and interpretation
The maximum prosthetic knee angle, the self-selected walking speed and the minimal value of contralateral knee power during loading response are plotted in for all conditions.
When using nSR strategy the maximum knee flexion was small and an important negative power at the contralateral knee was observed during the loading response ().
Figure 2. Maximum prosthetic knee flexion angle (top), self-selected walking speed (middle) and minimum contralateral knee power during loading response (bottom). Each cross stands for a gait cycle. The dots represent the average for all the cycles.
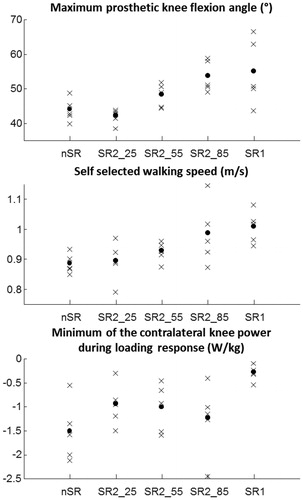
SR1 strategy allowed to increase the maximum prosthetic knee flexion and self-selected walking speed, there was no contralateral knee negative power during loading response. This last result is consistent with the extension of the contralateral knee at heel strike.
Swing release strategies (SR2_XX) resulted in an increased prosthetic knee flexion angle as well as a slight increase in self-selected speed compared with the strategy without swing release (nSR). These results are consistent with those reported in Bell et al. (Citation2016).
As in nSR condition, a burst of negative power occurred at the contralateral knee during loading response. However, its magnitude was decreased in SR2_XX conditions, corresponding to a decreased demand on the sound limb.
It can also be noticed that maximum prosthetic knee flexion increased and minimal contralateral knee power decreased as the value of increased.
3.3. Limits
Data in this preliminary study were acquired only for a single asymptomatic subject. The gait pattern presented herein might thus not be representative of a prosthesis user.
4. Conclusions
This study presents a new control strategy for passive microprocessor controlled prostheses during downhill ambulation of people with transfemoral amputation. The results suggest that in slopes of low inclination, this strategy, which control the swing release, allows people to walk with a decreased demand on the contralateral side and higher prosthetic knee flexion and self-selected walking speed compared to a strategy using classical stance phase control. Although this study included only one asymptomatic subject, the results seem promising and motivate further investigation.
References
- Bell EM, Pruziner AL, Wilken JM, Wolf EJ. 2016. Performance of conventional and X2® prosthetic knees during slope descent. Clin Biomech (Bristol, Avon)). 33(February):26–31.
- Dauriac B, Bonnet X, Villa C. 2017. Preliminary evaluation of a microprocessor controlled knee ankle prosthesis (MKAP) for above knee amputees. In Am Acad Orthotists Prosthetists 43rd Acad Annu Meet Sci Symp. Chicago: Wolters Kluwer.
- Ferreira C, Reis LP, Santos CP. 2016. Review of control strategies for lower limb prostheses. In: Reis LP, Moreira AP, Lima PU, Montano L, Muñoz-Martinez V, editors. Robot 2015 Second Iber Robot Conf. Cham: Springer International Publishing; p. 209–220.
- Pillet H, Drevelle X, Bonnet X, Villa C, Martinet N, Sauret C, Bascou J, Loiret I, Djian F, Rapin N, et al. 2014. APSIC: Training and fitting amputees during situations of daily living. Irbm. 35(2):60–65.