
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.1. Introduction
Sport research is a key to improve performance and to prevent the risk of injury. In table tennis, many injuries are located at the upper limbs, but also at the hip joint (Nguyen et al. Citation2016). To investigate the origin of these hip injuries, both joint kinematics and kinetics should be taken into account.
Kinetics data required the knowledge of external forces, which are usually obtained through force platforms. Force platforms measure 3D forces but are fixed in the motion analysis laboratory. As a consequence, it is often difficult to record ground reaction forces (GRF) for all foot support during sport motions, in particular in activities such as table tennis where players usually spread their legs apart and have to perform displacement to adjust their placement with respect to the incoming ball. Hence, it would be useful to make the GRF measurement under only one foot and to assess GRF under the second foot based on human bodies kinematics and inertial parameters. Some authors already have investigated this kind of GRF estimation for gait analysis (Pillet et al. Citation2010). However, it may be another challenge with more dynamic activities such as table tennis.
The purpose of this study was to evaluate the assessment of 3D GRF under one foot based on body segments kinematics and inertial parameters, and the GRF measurement under the second foot.
2. Methods
2.1. Participants and experimentation
Two young males national table tennis players (14 and 12 y.o., height: 1.54 and 1.55 m, mass: 45 and 46 kg) participated in this study (No. RCB 2018-A00173-52). They were equipped with 91 reflective markers placed on the whole body and the racket. Motion capture acquisitions were performed with a 15-cameras optoelectronic motion capture system (Vicon System, Oxford Metrics Inc., UK, 200 Hz) with simultaneous recording of GRF with two force plates (AMTI OR6, USA, 1000 Hz).
Motion capture acquisitions included a first acquisition with the participant standing in a static position; acquisitions of functional movements mobilizing sequentially all the joints of the body; and two simulations of five consecutive table tennis forehand strokes in a lab position allowing both GRF to be measured.
Participants also underwent a low dose biplanar radiographic acquisition (EOS, EOS Imaging, France) without removing the markers, allowing 3D reconstruction of lower limbs bones and markers.
2.2. Data processing
The data extracted from the motion capture were processed with OpenSim 3.3 (Delp et al. Citation2007). First, the model was scaled based on the position of the markers during the static reference position. Then, the pelvis and lower limbs parts of the model were personalised based on 3D reconstructions of bones and markers. Then, an optimization of the body segment inertial parameters (i.e., the segments’ mass and centre of mass) was performed based on the functional movements. Joint angles have been obtained using a multibody kinematic optimisation with OpenSim inverse kinematics tool.
Body segments kinematics and inertial parameters were then used, combined with the measured left foot GRF (FL), to assess the right foot GRF (FR):
With m the mass of the whole body, a the whole body centre of mass acceleration and Fgravity the weight. The same method was also applied for the right foot torque computation.
The RMSD (root mean square difference) was computed in percentage of the reference value (measured GRF).
3. Results and discussion
Results showed a relatively good agreement between estimated and measured GRF on the vertical axis (Y-axis) (). However, looking in details showed force RMSD was of 40.0 ± 4.4% on the X-axis, 30.4 ± 9.4% on the Y-axis and 48.5 ± 8.0 on the Z-axis. The maximal differences reached 220 N. But high differences are concentrated during peak instants ().
Figure 1. Evolution of the three GRF for the measured and estimated GRF.
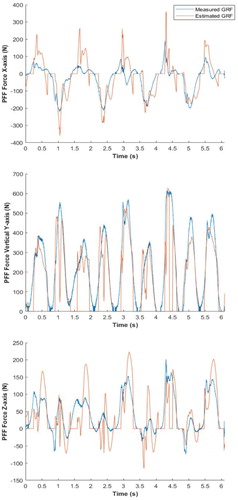
The vertical axis has the least differences among the three axis. It is because the contribution of the acceleration term ( is smaller than on the other axis because of the gravity, which is along the Y-axis and does not contribute to X- and Z-axis GRF.
The RMSD were higher than the one reported by Pillet et al. (Citation2010) which was of about 10% of difference on all three axes. However, this study was performed during a walking activity and our study focuses on more dynamic table tennis motion, which could explain the higher differences.
These differences at the peak of the forces reflect inconsistency of the model that might exist even after optimizing those parameters since it is at this time that players have the more dynamic movements. More probably, kinematics, which necessitates multiple time differentiations, can be the major source of these high inconsistencies during peaks instants (Muller Citation2017).
4. Conclusions
The estimation of the GRF based on Newton’s second law has shown to be a good estimation for out of the peaks GRF but tend to over-estimate peak values. Therefore, this method can be used to estimate GRF data but is sensitive to peaks.
Acknowledgements
This study was supported by the French Ministry of Sports (grant 17r22).
References
- Delp SL, Anderson FC, Arnold AS, Loan P, Habib A, John CT, Guendelman E, Thelen DG. 2007. OpenSim: open-source software to create and analyze dynamic simulations of movement. IEEE Trans Biomed Eng. 54(11):1940–1950.
- Muller A. 2017. Contributions méthodologiques à l’analyse musculo-squelettique de l’humain dans l’objectif d’un compromis précision performance.
- Nguyen S, Sauret C, Bourgain M, Le Garrec S, Jacquet-Yquel R, Palierne C, Thoreux P. 2016. Pathologies coxo-fémorales des pongistes de haut niveau. SFTS-SFMES. Pau, France.
- Pillet H, Bonnet X, Lavaste F, Skalli W. 2010. Evaluation of force plate-less estimation of the trajectory of the centre of pressure during gait. Comparison of two anthropometric models. Gait Posture. 31(2):147–152.