
1. Introduction
Quasi-stiffness has been used as a parameter revealing the global mechanical behaviour of lower limb joints during locomotion and more particularly that of the ankle. This parameter has been defined as a linear relation between the intersegmental moment and the joint angle. It represents the resistance that a joint offers to a movement due to both passive and active structures spanning the joint (Latash and Zatsiorsky Citation1993). As the joint does not act as a real passive spring, the term ‘quasi-stiffness’ is used. In the absence of muscle activation, this parameter can evaluate the behaviour of the ligaments, tendons, muscular and fascia tissues. Recently, multi-segment kinetic foot models have received an increasing attention for evaluating the intrinsic foot joints in both healthy and pathological subjects. An approach combining force platform and pressure plate using a distribution scheme (as validated by Saraswat et al. (Citation2014)) together with an extensive marker set allows to compute intersegmental moments in the ankle, Chopart, Lisfranc and metatarsophalangeal joints. The foot has the ability to function as a mobile adapter to support the entire body weight across different terrains, and to act as a rigid lever to propel efficiently the body forward (Mcpoil and Knecht, Citation1985). Thus, quasi-stiffness of intrinsic foot joints could provide further insights to analyse foot function during gait. The ankle and the metatarsophalangeal joints provide two pivotal sites for sagittal plane motion and the subtalar, Chopart and Lisfranc joints are supposed to give flexibility and stability to adapt the foot to all surfaces and direction change. Quasi-stiffness may vary at different foot joints during foot rockers. The aim of this study was to calculate, for an asymptomatic healthy population, the quasi-stiffness of the intrinsic foot joints during mid-stance. This phase is characterised by a single leg support with low propulsion as it occurs before heel-off and by a presumed major contribution of the passive foot structures.
2. Methods
2.1. Subject
Twenty asymptomatic subjects were recruited (age 45 ± 12 years, BMI: 24.62 ± 2.5 kg/m2, walking speed 1.39 ± 0.15 m/s). All participants signed an informed consent approved by a local Ethics Committee (B200-2017-061). For all subjects both feet were studied resulting in 40 feet analysed in total.
2.2. Protocol
The assessment of kinematics and kinetics was done using 8 optoelectronic cameras, a force platform to measure ground reaction forces and moments and a pressure plate to measure foot pressure all synchronised at 200 Hz. Thirty-two markers were positioned by the same experienced clinician using the model proposed by Deschamps et al. (Citation2017). This model allows to measure intersegmental angles and moments for ankle (shank-calcaneus), Chopart (calcaneus-midfoot), Lisfranc (midfoot-metatarsus) and first metatarso-phalangeal (MPT1) joints. Participants were asked to walk barefoot at self-selected speed along a 10 m foot path until 5 valid trials (no visual gait adjustment to target pressure plate and clear foot-contact within the plate) were recorded.
2.3. Data analysis
Data analysis was identical with that described by Deleu et al. (Citation2020). Point trajectory and force platform data were filtered using a low-pass zero-lag, 4th order, Butterworth filter with a cut-off frequency of 10 Hz. The force data were distributed using a proportional distribution scheme (Saraswat et al. Citation2014). Inertia effects of the foot were considered negligible compared to the ground reaction force. The mid-stance phase was defined from the contralateral foot-off to the ipsilateral heel-off. For each joint of interest, the intersegmental flexion extension moment was plotted against the flexion extension angle. The quasi-stiffness was then calculated using a linear regression on the portion corresponding to the mid-stance sampled instants of time. For each joint, a boxplot was used to show the distribution of the quasi-stiffness for the complete population (median value and the interquartile range (IQR) were calculated).
3. Results and discussion
illustrates for each joint the mean flexion extension moment for all subjects plotted against the mean flexion extension angle with the corresponding linear regression allowing to compute the quasi-stiffness during mid-stance.
Figure 1. Mean intersegmental moment vs. mean joint angle during stance phase from all trials and subjects.
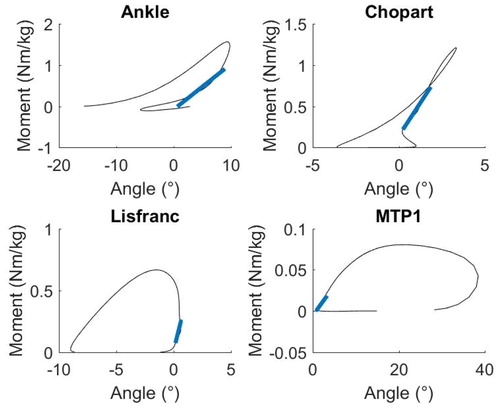
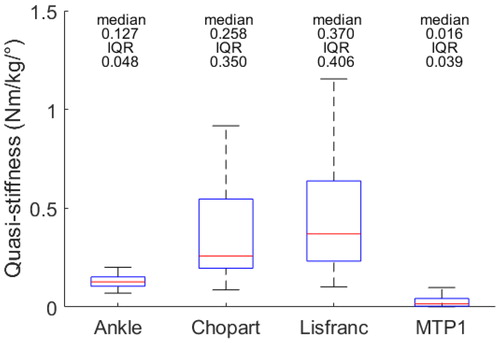
During mid-stance, Chopart and Lisfranc joints had the highest quasi-stiffness and the ankle and the MTP1 the lowest value (). Moreover, a higher IQR for Chopart and Lisfranc joints was found. The higher quasi-stiffness was expected as, during mid-stance, Chopart and Lisfranc joints are supposed to be locked to avoid the collapsing of the longitudinal foot arch during the loading of the foot. The mid-stance of gait occurs during the ankle rocker where the ankle joint is supposed to control the rotation of the shank above while the MTP1 joint is still playing a limited role, both resulting in a lower quasi-stiffness. The quasi-stiffness results seem to be in accordance with earlier findings describing foot biomechanics (Farris et al. Citation2019).
Figure 2. Boxplot of the quasi-stiffness of intrinsic foot joints for the complete population.
To the authors’ knowledge, the main novelties of this study was to calculate the quasi-stiffness of intrinsic foot joints using proper inverse dynamics methods in addition to integrate Chopart and Lisfranc joints in the analysis. Previous studies who calculated quasi-stiffness for intrinsic foot joints used only a pressure platform, neglecting all non-vertical forces and moments (Sanchis et al. Citation2019), or computed MTP1 moments only after heel-off (Day and Hahn Citation2019).
The higher variability found for Chopart and Lisfranc joints might be due to the lower range of motion of these two joints. Errors in the kinematics and kinetics may also arise due to the soft tissue artefact. It was chosen to focus in this study on mid-stance where the stability of the foot is not only provided by passive structures but also by isometric contraction of the plantar intrinsic muscles. Still, during mid-stance, it can be supposed that passive structures are responsible for a large portion of the quasi-stiffness, especially in Chopart and Lisfranc joints, as reported using foot musculo-skeletal models (Kim et al. Citation2018).
4. Conclusions
During this study, the quasi-stiffness of the intrinsic foot joints has been quantified in asymptomatic subjects and the different roles played by the joints during mid-stance illustrated. As expected, Chopart and Lisfranc joints showed higher quasi-stiffness than ankle and MTP1 in agreement with the described foot biomechanics. Further research is required to analyze in a systematic and automatic manner the other subphases of the gait cycle for diagnosis and follow-up of pathological subjects.
Acknowledgements
We would like to thank Vincent Ballesio for his technical support.
References
- Day EM, Hahn ME. 2019. Dynamic Angular stiffness about the metatarsophalangeal joint increases with running speed. Hum Mov Sci. 67:102501.
- Deleu P-A, Chèze L, Dumas R, Besse J-L, Leemrijse T, Devos Bevernage B, Birch I, Naaim A. 2020. Intrinsic foot joints adapt a stabilized-resistive configuration during stance phase. J Foot Ankle Res. 13(1):13.
- Deschamps K, Eerdekens M, Desmet D, Matricali GA, Wuite S, Staes F. 2017. Estimation of foot joint kinetics in three and four segment foot models using an existing proportionality scheme: application in paediatric barefoot walking. J Biomech. 61:168–175.
- Farris DJ, Kelly LA, Cresswell AG, Lichtwark GA. 2019. The functional importance of human foot muscles for bipedal locomotion. Proc Natl Acad Sci USA. 116(5):1645–1650.
- Latash M, Zatsiorsky V. 1993. Joint stiffness: myth or reality. Hum Mov Sci. 12(6):653–692.
- Mcpoil T G, Knecht H G. 1985. Biomechanics of the Foot in Walking: A Function Approach. J Orthop Sports Phys Ther. 7(2):69–72. doi:10.2519/jospt.1985.7.2.69.
- Sanchis E, Luis J, Roda A, Huerta JP. 2019. Variability of the dynamic stiffness of foot joints. Effect of gait speed. J Am Podiatr Med Assocn. 109(4):291–298.
- Saraswat P, MacWilliams BA, Davis RB, D'Astous JL. 2014. Kinematics and kinetics of normal and planovalgus feet during walking. Gait Posture. 39(1):339–345.
- Kim Y, Lee KM, Koo S. 2018. Joint moments and contact forces in the foot during walking. J Biomech. 74:79–85.