
Abstract
This article introduces a micro-phenomenological method for interpersonal synergy research, which operates on a sub-second timescale or slightly higher. This is illustrated by two short sequences of joint creativity from Contact Improvisation (CI), a dance where duets produce spontaneous interaction patterns in constant flow and with deep connection of their bodies – their synergies stretch across body boundaries. My aim was to systematically take stock of components of these synergies, to describe sharing patterns, and to reconstruct how joint functionalities such as acrobatic lifts may spontaneously emerge. One focus concerns synergy dynamics, from micro-scale processes of interactive synergy build-up to transitions and larger “flows” in which one synergy evolves into another. A complementary focus concerns how a duet structurally organizes its “collective physics” (weight sharing, skeletal alignment, inter-body muscle chains, etc.) and adjusts them for regulation purposes. The proposed method strikes a balance between subjective meanings and biomechanic descriptiveness, thus providing applied benefits (e.g., for trainers), scholarly benefits (e.g., for modeling improvised synergies), and benefits for interdisciplinary discourse.
Introduction
Applying the notion of synergy to interaction means investigating how multiple individuals can coordinate “as if they were one.” Almost everybody recognizes a good interpersonal synergy when they experience it, from doing kitchen work or handicrafts together, via conversations, play, and sex, to sports, dance, and professional environments. Being a good team, a theater ensemble with stage presence, and a successful couple in childrearing may relate to the notion of interpersonal synergy. The concept raises fascinating questions about collective coordination feats both in terms of their roots in embodied communication and their underlying forms, biomechanics, and skills.
Aims
The scientific study of interpersonal synergy has advanced steadily since the 1990s. Much of its progress owes to sports science approaches and quantitative tools developed in this context. The present contribution hands scholars (as well as trainers and practitioners) a complementary kind of tool, based on qualitative micro-analysis of interaction; it offers conceptual refinements for synergy science based on empirical investigations of the experience and skills of experts.
The present empirical illustrations concentrate on interpersonal synergy practices of expert dancers from the “inside,” starting from their subjective meanings, technical knowledge, and coordinative skills in a skin-to-skin interaction setting. I will present a fine-grained analysis of two short dance sequences, which exemplarily stand for many dozens of analyzed similar events and which showcase what a process-sensitive qualitative analysis is capable of: This will combine a structural focus describing inter-body structures in their “collective physics” (i.e., shared functional physiology) with a dynamic focus on synergy assembly and how it is mediated by embodied communication. In the examples to be looked at, interpersonal synergies are not planned or agreed-upon routine patterns. They emerge spontaneously as two persons communicate within a shared physical medium.
My inquiry begins with concepts, definitions, and a literature overview, then moves into a methodology section that prepares for the two case vignettes from improvised dance, and concludes with a discussion of dimensions of interpersonal synergy and future research questions.
Definitions and concepts
Synergy means “working together” in Greek. The concept expresses how elements are coordinated and mutually adjusted to achieve a particular collective behavior, that is, “functional groupings of structural elements (e.g., nerves, muscles, joints) that are temporarily constrained to act as a single coherent unit” (Kelso, Citation2009, p. 1537). The concept of synergy is defined functionally. It is well known that, for example, to extend the arm in reaching for an object one need not necessarily recruit fixed set of muscles with fixed placements at the same joint. The same set of components may be used to form different synergies (Latash et al., Citation2008). Inversely, different components can support the same task (degeneracy) (Harrison & Stergiou, Citation2015). It is argued that synergy-based coordination mechanisms can effectively stabilize perturbations and enable non-stereotypical adaptations to task variations (Latash, Citation2008; Latash & Zatsiorsky, Citation2016). These mechanisms provide both flexibility and task stability (Latash, Citation2012, Citation2019)Footnote1 and explain dexterity in terms of context-sensitive component couplings (Turvey, Citation2007).
Creating a synergy involves a task-constrained interdependent control of parts within wholes. Therefore, its descriptive inquiry will include (a) a lower-level set of elements (specific muscles, joints, fascia, etc.), (b) sharing patterns (limb synchronizations, muscle chain activations, etc.), and (c) a collective performance variable such as uprightness in walking.
Applied to social interaction contexts, the concept of synergy refers to how two or more agents temporarily organize themselves for an ensemble task. In this process, elements from across individuals create a dynamical system by virtue of selective coupling and synchronization. Araújo and Davids (Citation2016, p. 1) define interpersonal synergies as a “collective property of a task-specific organization of individuals, such that the degrees of freedom of each are coupled, enabling [them] to co-regulate each other”, thus pointing to a system of mutual interdependencies. Four aspects need to be emphasized:
First, the concept implies that individuals create some collective biomechanic functionality through interdependent behavioral organization. This functionality should be multiplicative, rather than merely additive. It should also exclude externally triggered synchronizations, such as those of a group of people suddenly running for shelter when a thunderstorm starts (Searle, Citation1990), which lack any collective functionality.Footnote2
Secondly, the degrees of freedom of individuals are tightly (if selectively) coupled to supply this function. The global organization should be mathematically low-dimensional (Oullier & Kelso, Citation2009; Riley et al., Citation2011), so that it can be reasonably expressed in a single coupling equation or otherwise described in ways analogous to the coordination of elements within a body. Describing the global task norms and optimality conditions is important for studying synergy, for example, when members of a soccer team interdependently regulate relational states such as distance, angle, or speed difference.
A third hallmark is dynamic responsiveness during a task. Thus, individuals swiftly adjust to others’ actions or external changes, often to preserve some ensemble functionality. This error compensation (Latash, Citation2008; Latash et al., Citation2008) often happens in systemic ways, notably via adjustments that are distal from the site of the perturbation or via global changes (Turvey, Citation2007).
Fourth and finally, particular patterns of linkage and sharing between components underlie any macro-scopic synergy. The idea of sharing patterns (Latash, Citation2008) characterizes the contribution of each component to the whole, thus giving qualitative expression to covariance or codependency relations that stretch across body boundaries. Related, Araújo and Davids (Citation2016, p. 7) speak of “different ways [elements] can link together.”
To sum up, elements from across individuals are interdependently organized to establish a macro-system with a collective functionality. Note that synergies, thus defined, need not be deliberate, especially not in the sense of advance planning or shared prior goals. A multiplicative function can arise as intended by one person, by both persons (via explicit or implicit agreement), arise as a spontaneous interest, be half accidental (e.g., as outcome of some “save”), or it can even be completely unintended (e.g., when people fall into lockstep) (Richardson et al., Citation2007). Just as individual bodies may experience undesirable “problem coalitions” (Kimmel et al., Citation2015; Kimmel & Irran, Citation2021); similarly, paradoxical interpersonal synergies can arise, which contravene everybody’s intentions such as accidental mirroring behavior, when two people try to walk past each other in a narrow corridor (De Jaegher & Di Paolo, Citation2007).
Importantly, we must take care not to misunderstand joint biomechanics as necessarily implying joint purpose. In non-collaborative interaction forms such as martial arts, one person creates a synergy despite substantial efforts of an opponent to prevent it (Kimmel & Rogler, Citation2019; Krabben et al., Citation2019). The specific forms of dynamic adjustment differ too: Whereas in collaborative synergies individuals compensate for other’s glitches (Riley et al., Citation2011) for the sake of the joint task, antagonistic synergy adjustment does the opposite. It is about counteracting hindrances, neutralizing perturbations from opponents, amplifying their mistakes, or deceiving them to impose one’s own preferred synergy. Reciprocal compensation, as Riley and colleagues imply, thus constitutes too narrow a criterion.
In the interpersonal realm, the medium of synergy creation is almost always informational, as when soccer team mates interact visually at a distance, and it is often also physical, as in the mechanics of martial arts grappling. It is equally important to note that any collective synergy is functionally continuous with lower-scale synergies of the individual body. Individual coordination follows its own aims (such as staying upright), yet also becomes the essential tool to manipulate collective synergies, an idea I shall return to.
Previous research
Interpersonal synergies have been recognized as fundamental in social cognition beginning with, in a broader sense, Merleau-Ponty (Citation1968, p. 142). More recently ecological psychology has reclaimed the notion (Marsh et al., Citation2009); researchers variously emphasize its role for sensorimotor empathy (Chemero, Citation2016), conversational activity (Cummins, Citation2013; Fusaroli et al., Citation2014; Marsh, Citation2015), artistic improvisation (Walton et al., Citation2015), or the intercorporeal sense-making activities that underlie language (Di Paolo et al., Citation2018). Extended cognition theory even speaks of synergies between biological and non-biological parts (Anderson et al., Citation2012).
A seminal early study of interpersonal synergy was an experiment of limb synchronization (Schmidt et al. Citation1990). This led to similar applications to joint walking together, rocking chairs together, finger tapping, carrying objects together, and joint rope turning (Fine & Amazeen, Citation2014; Harrison & Richardson, Citation2009; Huys et al. Citation2018; Schmidt et al., Citation2011; Sylos-Labini et al., Citation2018; van der Wel et al., Citation2011), which confirm synergistic principles. For example, the coordination of two people carrying a foam block together or just walking behind each other at a particular distance resembles the gait of a single quadruped animal.
A number of studies have also addressed the important role of mechanical coupling for regulating interpersonal synergies, which may add to perception-action coupling. For example, concerning quadruped gaits in joint carrying tasks, Lanini et al. (Citation2017) reclaim a strong role for passive dynamic effects, even if certain coordinative aspects likely require cognitive regulation strategies. Similarly, two rowers who are connected by their boat are stabilized in their coordination, especially in antiphase coupling (Cuijpers et al., Citation2019). Again related, mechanical coupling can (slightly) improve visual control of postural sway, and provide mutual benefits even when your partner is less stable that you, unless you are already extremely stable to begin with (Reynolds & Osler, Citation2014). Further evidence indicates that a jointly handled tool can lead to effective work-sharing strategies, in which each person specializes in one component of the synergy and which provide advantages over performing the task individually (Reed et al Citation2006).Footnote3
A physical connection, quite irrespective of its mechanical coordination effects, can also provide the benefit of haptic cues, which facilitate cognitive coordination by conveying subtle “information about movement goals rather than providing physical assistance” (Sawers et al., Citation2017, p. 1). Skilled strategies may be employed to generate this information. The study last mentioned speculates that participants with dance experience amplify the force exchange through arm stiffening, whereas van der Wel et al. (Citation2011) who studied two persons pulling a pole back and forth between two targets, each controlling one rope, provide direct evidence that the participants strategically let their forces overlap in time in order to maximize the haptic information.
Overall, the experimental world is beginning to move beyond the study of rhythmic coupling dynamics as its central paradigm (for a discussion of the limits of this see Sebanz & Knoblich, Citation2009). Experiments by de Poel (Citation2016) support the view that only relatively few between-person synergies show forms of isotropic coupling; most are anisotropic and gravitate toward a leader-follower distribution or, in some cases, toward antagonism, where the coupling has a repulsive or inhibitory influence.
Recently, more naturalistic studies have emerged, many of which track synergistic behavior via time series signatures. Metrics have been developed for quantifying synergies in natural dialog (Fusaroli et al., Citation2014; Schmidt & Fitzpatrick, Citation2016) and joint improvisation (Walton et al., Citation2015). Aggregate measures for global synergy quantification have also been proposed for dyads in rugby, studying the ball carrier and one support player to “identify the process in which system components vary to stabilize task specific performance variables” (Passos et al., Citation2018). Further studies globally distinguish types of team behaviors (Araújo & Davids, Citation2015), coupling modes (Bourbousson et al., Citation2010), and degrees of behavioral fusion (Araújo & Davids, Citation2016).
A number of studies of dynamic pattern formation in competitive sports contexts have focused on how collective variables, which are held to “sum up” a synergy, change over time. Thus, in kendo, rugby, boxing, or basketball the collective state is expressible as coordinated velocities, interpersonal geometries, ideal distances, phasing relations, and the like (Bourbousson et al., Citation2010; Correia et al., Citation2016; Esteves et al., Citation2011; Hristovski et al., Citation2006; Travassos et al., Citation2012; Yamamoto et al., Citation2016). A study of defensive actions in rugby indicates that the synergy patterns created relative to opponents depend on prior states, notably on prior interpersonal distance and speed difference (Passos et al., Citation2008). As regards synergies within a team, Passos et al. (Citation2011) studied how four rugby attackers maintain a diamond-shaped formation and co-adapt their velocities, yet as they get closer to the defense adopt evasive behaviors that slight change the synergy, as expressed by their mean distance.
To address the micro-relations of synergies in teams, one study indexed preferred communication channels in the network of players by comparing link strengths on a pair-wise basis (Duarte et al., Citation2012). Furthermore, modes of local coupling to nearby players have been distinguished from coupling with the larger team configuration. Players do not always attend to the whole team (Bourbousson et al., Citation2010) and local information can be effective for coordinating, although guidance that comes from tracking the global team dynamics (holoptism) can play a role as well (Bourbousson & Fortes-Bourbousson, Citation2016).
Torrents et al. (Citation2010) applied observational coding to interaction units in Contact Improvisation (CI) dance, distinguishing 49 basic elements such as support stability in lifts or level changing, allowing them to chart the relative frequencies of different synergies and components. They contrasted three couples and the influence of different instructional constraints to describe which technical synergies are most common, as well as describing the rate of exploratory behaviors (Torrents Martín et al., Citation2015). Even general research on distributed cognition can be interpreted as researching synergies via activity scores (Hutchins, Citation1995), which use synchronized video footage from multiple stations on a naval vessel to represent coordinated (parallel or sequential) team operations on a plot.
Only most recently, subjectively oriented studies have begun to use stimulated recall techniques investigate what individuals draw on for perceptual guidance when they create interpersonal synergies. Gesbert et al. (Citation2017) show for soccer that this depends on the logic of the situation, which, for example, determines whether to focus on nearby players or on more global information. The authors analyze the perceptions of individual players in a triad, from which collective modes of functioning can be inferred. Feigean et al. (Citation2018) differentiate informational resources and six associated attentional modalities with respect to what is happening on the soccer pitch. My own team’s studies contrast micro-dynamics of improvised synergy (Kimmel et al., Citation2018) and describe how two people may converge into creative synergies (Kimmel & Hristova, Citationaccepted). We also analyzed non-collaborative synergies in the martial art Aikido, which can involve “hijacking” another person’s dynamics (Kimmel & Rogler, Citation2018), which synergy an attacker can be defeated by is sensitive to the emergent interaction and thus path-dependent. Both initial conditions and later reactions of the opponent shape the preferred tool mix (Kimmel & Rogler, Citation2019).
Finally, research connecting phenomenological and observational data may have some pertinence for synergy studies. To study coordination patterns in groups of four people or more, particular interaction games have been devised (Himberg et al., Citation2018). These strive to interrelate the subjective experience of group connectedness with the observed levels of synchronization.
Method
To grasp interpersonal synergy as a phenomenon happening in and over time, a process analysis with a high zoom-factor is helpful. This section presents a phenomenological approach, which was customized to investigate micro-dynamics and structural aspects of synergy.
Background and research protocol
Micro-genetic research tools aim to investigate how an interaction process unfolds down to the sub-second scale. Broadly speaking, these tools come in two kinds: Observational methods of a micro-grainsize type have emerged in cognitive science (Crandall et al., Citation2006; Fogel et al., Citation2006; Lavelli et al., Citation2006; Nomikou et al., Citation2016; Steffensen, Citation2013; Trasmundi & Steffensen, Citation2016). Complementarily, phenomenologically oriented methods – sometimes called first and second person methods – have been variously developed, ranging from the French cours d’action tradition (Gesbert et al., Citation2017; Rochat et al., Citation2018), via related sports contexts (Bourbousson & Fortes-Bourbousson, Citation2016; Feigean et al., Citation2018; Gesbert et al., Citation2017; Kermarrec & Bossard, Citation2014; Macquet, Citation2009; Macquet & Fleurance, Citation2007; Macquet & Kragba, Citation2015; Nyberg, Citation2015; R’Kiouak et al., Citation2018) to embodied-ecological cognition approaches to dance and martial arts (Kimmel et al., Citation2018; Kimmel & Hristova, Citationaccepted; Kimmel & Rogler, Citation2019; Łucznik & Loesche, Citation2017). Finally, other phenomenological studies of embodied skills bear brief mention, which do not have a micro-scale focus (He & Ravn, Citation2017; Høffding & Martiny, Citation2016; Legrand & Ravn, Citation2009; Ravn & Hansen, Citation2013).
This analysis is situated within a micro-phenomenological tradition and, more specifically, a dialogic strand which employs a kind of Socratic dialog with informants (Bitbol & Petitmengin, Citation2013; Petitmengin, Citation2006; Valenzuela-Moguillansky & Vásquez-Rosati, Citation2019). My aim is accessing subjective meanings in ways that stay reasonably close to the needs of biomechanic modeling.
Three interviewers, one of whom is a long-time expert herself, met with two experienced CI dancers in a workshop setting and asked them to improvise. Together with the dancers we selected short events, typically of 3–12 seconds length, for a fine-grained reconstruction. The reconstructive dialog involved multiple “sweeps” (cf. Crandall et al., Citation2006; Klein, Citation2003) that build in intensity from a summary description to a detailed process examination, subsequent probes, and hypothetical questioning: We started by asking the dancers to summarize the event. Then, we created an event timeline and asked them to globally reference the phases to it, before parsing every phase into sub-structures. Dancers A and B took turns in giving an account of each of the resulting “thin slices,” often at the sub-second level, although they were free to comment on each other any time. This led to a detailed reconstruction of the “who does what when.” Starting from individual micro-actions shown on the timeline we subsequently worked our way up to their reciprocal causalities as A and B respond to each other. Lastly, we asked hypothetical questions about particular junctures of the interaction and alternative choices that seemed less afforded or were left unexploited for other reasons.
Tools I: Show and tell
Interviews were supported by video-stimulated self-confrontation (cf. Axelsson & Jansson, Citation2018; Lyle, Citation2003; O’Brien, Citation1993; Sinnott et al., Citation2017). This allows the participants to describe facets of their experience while reviewing their dance in slow motion. It supports an immersive “re-experiencing” that firmly anchors the reports in the observables. We took care to reference verbalizations and pointing from the informants to the specific action that appears on the video at the same moment.
Informal forms of quasi-experimentation were added to this, which encouraged the dancers to repeat movements and actively experiment with variations. They were asked to explore changed task constraints (timing, initiative, attentional focus, geometry, etc.), or we introduced specific challenges and perturbations. A “show-and-tell” approach while exploring variations proved to be a highly powerful intuition pump. The encouraged variations make informants acutely aware of small-scale differences that equally make a difference at the level of the collective dynamic. This clarifies general task constraints, dimensions of possible variation, functional alternatives, as well as contingency reactions such as error compensation and re-routing, which are instructive to learn about optimal task contexts and the specific points at which a change begins to deteriorate the synergy. Since synergistic error compensation and the task-specific variability range (Latash, Citation2008; cf. Riley et al., Citation2011) are central theory topics, this method is a crucial tool.
Tools II: Facilitative interviewing
To optimally assist the experts in reflecting on “what happens when,” we applied a dialogic technique known as Explication Interviewing. This method was developed to make pre-reflective embodied cognition accessible, for example, intuitions and structures “hidden in the body” (Dreyfus & Dreyfus, Citation1999). Explication techniques can notably make non-observables accessible, such as imagery, intentions and preferences, anticipation, attention, emotion, pain, proprioception, subtle percepts as well as subtle actions such as muscle tone changes or breathing, all of which fall through the grid of observational methods.
Interviewers use facilitative questions in the fashion of a Socratic maieutic dialog, with the double aim of (a) stabilizing informants’ awareness and arresting attention on “thin slices” of experience and (b) of encouraging a bodily aware, yet reflexive evocative state (Depraz et al., Citation2003; Petitmengin, Citation2006; Stern, Citation2004). The dialog stays as closely as possible with the specific action and perception; it continuously keeps the informants grounded in the physical reality of the unique moment in focus. To achieve this objective, the interviewers must politely, but firmly discourage associations, explanations, general knowledge, or beliefs (Depraz et al., Citation2003; Froese et al., Citation2011; Høffding & Martiny, Citation2016; Petitmengin, Citation2006; Vermersch, Citation1994).
The interviewer’s presence (joint breathing, voice modulation, continuity, etc.) contributes to the informant’s evocative state. Interviewers are trained to be sensitive to hesitation, gaze, etc., to gauge how “connected” the respondent is. They learn to re-stabilize attention when needed to counteract pitfalls of introspection (Bitbol & Petitmengin, Citation2013) such as memory lapse, omission, confabulation, and ad hoc justification (Vermersch, Citation1999). Visual anchoring of the descriptions in the video footage supports this further in our specific protocol.
To effectively explicate a specific experience sufficient time is needed to elevate to awareness and verbalize its multiple facets. Therefore, interviewers typically come at the event from various angles. They also employ iterative checks and frequently re-paraphrase, which enriches the report of the experience progressively. It is important to emphasize that the dialogic philosophy of Explication Interviewing includes its own validation procedure through recursive probing until consensual saturation is reached.
In Explication Interviewing, it is important for questions to target the “how” or “what” of the experience, never the “why.” Accordingly, open questions are preferred such as “what happened next?” “what else did you do?” “what did you perceive?” or “how do you know you are ready to start/continue?” It is also recommended to use certain paradoxical probes to break impasses, such as “how do you know you don’t know?”
Wholes, parts, and sharing
For the specific aims of this research, we additionally developed a set of probes that are sensitive to our topic of synergy. In this regard, Araújo and Davids (Citation2016) propose that performance parameters, elements, and sharing patterns need to be reconstructed.
Performance parameters refer to collective functionalities, which ensure task stability (Bernstein, Citation1967). Any synergy can be summed up from the viewpoint of its task-defining outcome, for example, when carrying a heavy object together to keep its position level and up. A performance parameter has (dynamic) stability and typically fluctuates less than the subordinate components (e.g., maintaining a stable body center while the legs stay adjustable for this purpose). To address the performance parameters, we asked the dancers about important invariants they need to consistently ensure for the task, for example, the task-defining geometry in which a liftee is placed above a lifting person. Since dancing involves powerful physical interconnections, we also asked about the underlying “collective physics” of jointly created structures, such as geometries of skeletal alignment in “stacks,” muscle chains, fulcrums and levers, force vectors, or counterbalance configurations. Asking experts to describe how, for example, a fulcrum, is created is frequently necessary to understand the collective task and how individuals work together in support of it.
The network of mutually adjustable elements that stabilize performance parameters may be termed synergists. A central research aim was to systematically describe what happens in different parts of the overall synergy. We took stock of elements and asked about the function and variability of each. Interview probes included “please enumerate all components whose absence would alter the overall pattern”, “what can go wrong when doing this together?”, “if you reduce this parameter slowly, when does the action opportunity disappear or another action become attractive?”, and “what is the smallest possible variation that would change the outcome?” Furthermore, we inquired into the specifics of what different body parts are doing and what their specific contribution is in order to identify the larger functions they are involved in. Furthermore, we frequently encouraged varying parameters such as timing, exact placement, force deployment, or who acts first. Using the quasi-experimental method sketched above, we explored how parts adjust either to changes of external task constraints or small-scale changes in the other person.
Finally, we aimed at identifying how components link up into collective functionalities. This has been called sharing patterns (Latash, Citation2008), which express the qualitative way a collective function is established between elements through linking them physically or by sychronizing them. Accordingly, we investigated how connections are built and kept in an optimal (or viable) state, for example, with respect to how one adjust one’s behavior so it “hooks into” the inner structure of another person. In terms of general habits, we asked about basic prerequisites so other components can successfully link. At a micro-scale, we took interest in how simultaneous actions are mutually calibrated, for example, when the dance couple aligns the body axis of person A with the axis of person B. A key aspect of this was to capture how smaller synergies form part of larger ones, which elements behave relatively independently, which rapidly adjust to variations elsewhere at a local scale, and which events may trigger a global pattern adjustment (“when element X changes, which other elements need to change?”; “what did you do to compensate for the change/variation?”).
Analytic reconstruction
The central challenge for this research is to integrate the analysis of synergies with an interaction analysis – after all the synergies occur not only within, but also quite literally through interaction. As we shall see, in improvisational domains the small-scale causalities of interaction determine which synergy actually manifests in the end. Interaction thus “carries” the emergence of a synergy.
To capture how this happens, we identified the individual regulation objectives from both agent perspectives at a given moment, especially the actions undertaken with respect to the other person (manipulation, enablement, invitation, dynamic complementation, nudging, constraining, redirecting, provoking, etc.). Complementarily, the inquiry targeted perceived affordances, notably micro-triggers and “go” signals for starting or continuing a process, information indicating that adaptation is called for, information indicating serendipitous “doables,” information indicating readiness in the partner, and perceived action constraints that define the “affordance landscape” as a whole (cf. Rietveld & Kiverstein, Citation2014). Beyond the immediate affordances of the next moment, experts can frequently even verbalize subjective horizons of synergy creation – for example, synergies that move into reach if a small enabling action is added or if a specific response is provided by the other person.
On this basis, we reconstructed the embodied “give-and-take” between agents A and B in a bottom-up fashion. Patterns of reciprocal causation lay in focus, notably sequential or interlacing co-actions whereby A and B generate affordances for each other. This threw into relief the transactional dynamic of cross-scaffolding between agents, which can involve a range of different ways of influencing the other person, a process which may carry the build-up of increasingly complex synergies, as we shall later see.
Note that this kind of inquiry is a far cry from a reductive methodological individualism. Although it uses actions and perceptions of individuals A and B to bootstrap the interaction analysis, the perspective is inherently relational and focuses on how individual actions regulate the collective structure and dynamics. Relational percepts of the participants are probed (e.g., ideal geometries relative to a partner, interpersonal distances, angles, or weight distribution) and the inquiry is firmly grounded in a joint material reality. More importantly, the resulting transactional process analysis reconstructs an unfolding process of “give-and-take” and effectively unpacks the circular causality between micro- and macro-scales (cf. Sawyer, Citation2003). Thus, it throws into relief how interlacing regulatory micro-moves give rise to collective dynamics, as well as how this, in return, feeds back on the participants by providing constraints and affordances: Actions of person A at tn merge with co-actions of person B and feed into the collective dynamic, where they produce emergent effects at tn+1. In sum, a micro-phenomenological approach can provide a dialectic mediation between individual and collective levels of analysis – not wholly unlike quantitative approaches that predicate ecological regulation laws followed by individuals onto a model of collective dynamics, which emerge from following these laws (Fogel, Citation2006; Marsh et al., Citation2006; Warren, Citation2006).
The analysis is necessarily synthetic since an interview is sampled from two perspectives and has considerable extension. Even a half-second’s worth of interaction has far more aspects than can be simultaneously described; we thus review the event recursively. Verbalizations emerge by and by over an hour or more. Integrating these (and the visual data) constitutes a skill in its own right and, for full disclosure, it should be said that the researchers’ background in somatics, movement observation skills, and embodied empathy are essential for “connecting the dots.”
Micro-analysis I
To illustrate the procedure and its payoffs I will now analyze “in vivo” two spontaneous dance synergies with respect to their assembly process. Each example will highlight distinct theoretical implications, which are subsequently discussed and which are representative of dozens of other events analyzed in the same way.
Contact improvisation
The examples come from Contact Improvisation (CI), a form of contemporary dance developed in the 1970s. CI has a strong commitment to experimentation and kinesthetic sharing, in which creative potentials are explored without designated leaders or followers. It is usually practiced on the so-called jams in duets or larger formations, usually without music. Bodies are in contact and “a spontaneous mutual investigation of the energy and inertia paths [is] created when two people engage actively and dance freely” (Torrents et al., Citation2016, p. 94). The dance system allows enormous freedom. Both individuals operate within the bounds of collective meaning, respect, and safety, but also act autonomously to put their own stamp on things. Playful exploration dominates and “novel places” are sought while exploring weight sharing, kinesthesia, touch, and momentum. Interaction patterns range from complex acrobatics (lifts, backflips, supported handstands, rolling across one another, leaning, cantilevers, “sloughing off” the partner, etc.) to moving around in space (e.g., slow walking in circles), still moments of interiority (e.g., sensitive joint breathing or exploring slight leaning), and some out-of-contact moments as well.
In CI, many synergies are of a physical and indeed intimately intercorporeal nature. The dancers’ sensoria literally interpenetrate each other; a person can “sense into” the partner beyond the point of contact. Dancers can also guide action impulses there. Physical push-pull causation connects the bodies. Collective architectures arise through weight sharing, kinetic chains, support geometries, inter-body skeletal and muscle structures, fascial connections and tensegrity of human tissue (Silva et al., Citation2010), as well as lever physics. Moreover, moments of intense sharing may give rise to a special phenomenology of oneness and of extended body boundaries; experiences of agency can be decentralized as if shaped by a “third mind” (Kimmel et al., Citation2018). All this rather sharply contrasts with domains where synergies are orchestrated without touch, for example, when we fall into lockstep when walking side by side, or which involve greater distances, for example, when soccer players form an attack configuration. I would argue that a “skin-to-skin” interaction setting such as CI is ideal to showcase mutual dynamic entanglement (Froese & Fuchs, Citation2012).
Despite there being recognizable families of techniques such as lifts or weight sharing, CI dancing offers a multiplicity of affordances at every moment and an enjoyment of “not knowing” what comes next. CI improvisers continuously respond, adapt, and (mostly) respect whatever emerges to keep the dance alive. However, they also explore possibilities, experiment, leave the beaten path, exploit serendipity, and take each other by surprise. This is reflected in quotes such as “We don’t have goals. Whatever happens is right” or “We love little glitches because they take us off.” Dancers, figuratively speaking, say “yes, and” or “no but” to their partner while maintaining continuity and working with existing dynamics. While a certain cooperativity default dominates in CI, such that partners provide assistance in risky moments, dancers also emphasize self-responsibility. Moments of challenging, teasing, or – occasionally – tricking one another are possible. Individuals are free to shape and modulate each other’s actions while in progress, that is, amplify, “hijack,” or “turn around” partner actions in real time (cf. Kimmel & Rogler, Citation2018). All this contributes to unplanned creative patterns that emerge between the individuals (“It wasn’t a concept to go up, it’s a result of the actions”). Novel interactions emerge from the myriad small-scale self-organizing dynamics that can occur when two partly autonomous agents engage in participatory sense-making (De Jaegher & Di Paolo, Citation2007). The intense sensory sharing, physical entanglement, and real-time mutual responsiveness create many surprising interaction moments. Hence, synergies are often unique as well as spontaneous. As we shall see, they can be mediated by the interaction itself – or to speak with Sawyer and DeZutter (Citation2009), they exhibit “distributed creativity” – rather than being the outcome of prior design of any individual.
Global event description
Our first example is a shoulder lift, which occurred within an improvisation of several minutes. Its spontaneous, slightly surprising (to one dancer at least), and biomechanically demanding, yet also organic nature make it a good example for our purposes. The sequence has an overall duration of eight seconds, plus four seconds of pre-event. I will now describe the synergy assembly as step-wise processes of cross-scaffolding between the dancers, where each moment is continuous with the preceding state of the couple.
As our event sets in, the two dancers are engaged in playfully exploring a synergy of a biomechanically undemanding sort. They are physically connected, yet move independently around each other. This lasts for about four seconds. The female dancer (F) is on her feet and the male dancer (M) kneels in a quadruped stance. As this goes on, F catches up and falls back again briefly, but her hand keeps touching his back. (The hand moves down from the shoulder, then up again.) The axis of joint rotation between the dancers runs through this contact point, with F moving on a larger clockwise circle and M rotating in the center. Then, M suddenly decides to stop and takes F by surprise; she keeps moving for about another quarter circle until she stops as well. This produces a double outcome: An almost frontally aligned configuration arises and F’s momentum pushes her weight into M’s back. Sensing this, M stands up and begins to lift F on his shoulders. The initiative is his, as he opportunistically uses her momentum. This seemed a spontaneous, yet evident option. F reports “It was surprising. But [exploiting the opposite forces] was also obvious.” Looking in more detail, we can distinguish four phases (see ):
Figure 1. Lift: (a) pre-event of circling, (b) readiness: pushing into the kneeling dancer’s back creates a stable support & force balance, (c) initiation of lift, (d) execution: balancing on shoulders, beginning of downward slide. Source: Authors.
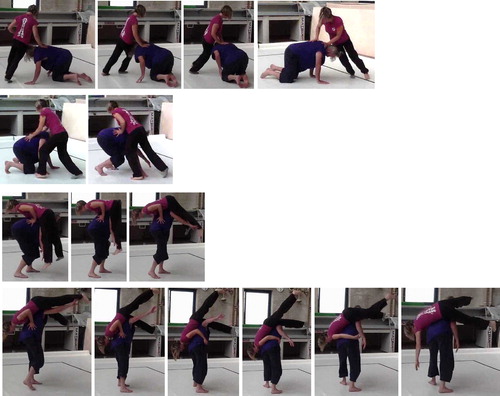
Pre-event (images 1–4): During the rotation, the two bodies move a bit closer. M stops rotating, she briefly continues about a quarter turn. F’s central body line meets him almost frontally; she stops just left to his head.
Transition toward readiness (images 5–6): F is sharing more weight now. M gets ready for receiving yet further weight by tucking his toes under and readies himself for the possibility of counter-pushing. F’s hand wanders from the shoulder interface to the mid back; her body weight is now more off her feet and both hands are now touching his back. M’s knees leave the ground.
Lift initiation (images 7–9): M gets up from the knees and begins a lift, using the existing momentum in addition to muscle force. F’s legs fully leave the ground; her elbows stabilize her weight on M’s back, with fingers spread out.
Lift execution (images 10–15): As the lift unfolds, adjustments are made. F is placed over M’s back on her belly, while he rotates. M becomes erect after F’s legs have left the ground. With a see-saw movement F balances her body on him; she embraces his torso with her head down; later in the lift she slides down very slowly. F now spreads her arms out as M bends forward a bit, which gives her more planar support and less need to hold on.
From pre-event to readiness
Let us now zoom in on what the dancers report for each phase: Through M’s sudden stopping of the rotation, F’s continued movement decouples their speed synchronization. Since they were, all along, in contact and shared minimal weight this makes F “fall into his body” with her center of gravity (“I felt gaining speed”). F notices this and gives up this weight more to M, thus actively yielding to a tendency that initially caught her by surprise. F also notes that during the “falling towards [M] the push made my center go into his shoulder.” They both realize a particular trigger affordance at this point. M notices that he is receiving more weight, which “triggered me to stand up.” Noticing a slight sense of F falling out and coming back in contributes here. As M gets up, he converts the force he has received by “giving it back into the lift.” The conserved momentum from stopping adds to his muscle power and facilitates standing up; possibly elastic rebound effects contribute here. M points out that the configurational change was a trigger moment (“oh, that’s something”) as F’s energy went from a lateral, via a diagonal to a frontal vector relation. The new inter-body geometry and their weight sharing create a single logic here, which the dancers perceive as what we may refer to as a springboard into a more complex acrobatic synergy.
Thus, for the lift to arise, precursor synergies are needed. Both dancers spatially align their centers of gravity; and they direct energy toward the partner’s center. F speaks of “bones getting aligned” between them and her “center being caught by him.” The last expression suggests that M contributes slightly more to creating this configuration, if only for the basic reason that he wants to effectively channel F’s weight into the ground through his arms and legs. Overall however, both dancers contribute to an organized (lower-dimensional) system of shared weight and alignment. They jointly converge on sending their energy into precisely opposed vectors. Thus, at each moment M, the dancer in the lower position responds to precisely the weight he receives from F on top (“It's just the fact of giving up the weight [that he] is giving […] back into the lift”).
To take stock of the individual contributions to this very first initiation of a lifting action we asked each dancer what they thought their task was at each moment:
F, even prior to the critical moment, was “orchestrating for the necessity of having my center close to him,” thus reducing interpersonal distance in a way that makes lifting an option.
F adjusts into a stable contact through both arms and pulls her elbows back, which allows her to stabilize herself and put more weight on M’s back. (She reacts to the challenging direction change, which had resulted from M’s sudden stopping and might have thrown her off balance.)
Falling toward M in this highly organized way allows F to create an arc between the point where they touch and her feet.
F also mentions creating vertical thighs and arms as well as a long spine.
Overall, F’s emphasis lies on creating a stable internal configuration in her body, while connecting with M in a way that directs her weight through both arms and brings her close enough to shift more weight from her legs to his shoulders. F’s own inner organization now increasingly extends into a collective architecture with her partner’s aligned organization and thus establishes a highly functional sharing pattern.
M emphasizes an inner organization that is habitual to him and already in place while F still circles around him: He is providing a stable quadruped stance and aligning his skeletal structure so his shoulders are placed precisely over the wrists and the spread out fingers. He connects with the ground and directs his weight through his structure. This CI habit provides a synergy kernel that M can then immediately build on without further preparation as the lift begins. It allows M to pick up F’s weight and channel it into the floor.
M tucks his toes under directly after he has stopped rotating and as more weight is coming to be shared. The toes are now ready to direct his lower-body force up through F’s hands, into her center of gravity. Note that he has no full intention of getting up and lifting at this moment yet, but the tucking under provides the condition of possibility, thus adding another synergy kernel to build on.
A moment later, an important inter-body synergy adds to M’s internal synergies. Just as F extends forth into M, M reciprocally extends forth into F’s body by fitting his inner alignment with the between-person geometry into an interpersonally aligned architecture.
M’s inner alignment and connection to the ground thus amplify the geometric alignment with F’s force vectors. This is what allows M to direct energy upward and “give back” F’s incoming momentum into the lift and, as he gets up, to effortlessly sustain F’s weight.
We can make two observations here. First, the collective alignment is created by and useful to both dancers. In a manner of speaking, two stable and well-aligned frames within each body are superimposed on each other. Second, we inquired into the perceptual triggers through which the subsequent lift gets built. This is a process of give-and-take: M initiates the lift precisely when F fully comes with her weight on his back. His “go” signal is sufficient “lightness” (i.e., perceived liftability) based on F’s forward-directed body center and minimal weight on her toes, her vector alignment with him, as well as her inner alignment (on perceived heaviness also see Waddell et al., Citation2016). The next moment, F is ready to pour her weight forward fully, based on perceiving M’s inner skeletal alignment and the recognition that it can therefore take up her body in a stable fashion. That is, without M’s stable support yielding her weight full-range would not feel safe to F.
From lift initiation to execution
Let us now take stock of the synergy components of the subsequent phase, in which M begins to rise and F’s legs fully leave the ground:
As before, M emphasizes that, to lift a partner effortlessly, “it doesn't need strength; it needs an understanding of the architecture,” a good inner skeletal organization where force goes into the bones.
M contributes a connective arc from the ground, via his body, to F’s body. As one central aspect of this he describes the need to connect body center to body center, which directs his lift energy into F’s center of gravity in a way that is stabilizing. Acting on someone’s center of gravity lessens the need to stabilize the lift with muscle force.
M keeps his back relatively planar, as a twist would make F slide off the side.
M keeps his legs relaxed and knees not locked to minimize muscle force needed to get up.
M provides preparatory synergies by further aligning his body center with his legs, dropping the tailbone and moving into her body center to pick her weight up. This further reduces muscle power needed.
A related principle for executing “an almost weightless” lift is that as M’s center moves toward his legs, he lifts his pelvis a bit, but then goes down “so we are going towards the floor and away from the floor at the same time.”
Once M becomes erect, he stands up with forward orientation to lift F and to keep her hanging head clear of any danger of crashing into the ground.
Once F lifts off fully her full weight is placed on M’s back via her hands, which hold on.
Next, as F is pulled up by M’s becoming erect, she drops her torso and head downwards, both falling into a perpendicular line (this begins slightly before he reaches full extension).
In the final phase, M rises to full length and F arrives on his shoulders. Now they must negotiate balance to achieve collective support stability:
For M, a critical element in this is a flexibly adaptive stance while moving around. He constantly micro-adjusts his stance to stay aligned enough so that his skeleton effectively carries F’s weight. This is especially evident in a brief moment of negotiation of stable balance as they arrive on top and as M loads F’s belly on his back. To micro-adjust the placement, M wiggles his shoulders and legs.
As the lift continues, M creates momentum through continuity of movement, viz. through some circling around in space on his feet.
F seems to hover quite unhurriedly, before sliding down. Letting the sliding movement flow is something both dancers enjoy at this moment. For F, it helps “keeping it light” and to avoid “weight stuck at the top.”
In the last phase, M ensure support stability with a slight reconfiguration; he bends forward to only about 45 degrees and keeps his back roughly planar in the lateral dimension, albeit with some rotation of the spine to accommodate F as she slides, who, as a result, feels that her “center is secured […] I don’t need the arm.”
F adds to the balancing the moment the lift begins. Surprised by the lift, she “almost unconsciously” initiates a leg scissors as she arrives on M’s shoulder. The left leg goes up; the right leg is stretched away at a right angle. As F teeters in a seesaw, she uses the left leg to regulate her balance.Footnote4
F also moves this leg into the line of gravitational pull, which helps to compensate for the momentum resulting from his energetic arrival in fully upright position.
F mentions that a central task is to supply enough tone and inner structure to be liftable (“not a sack of potatoes”). As subordinate synergy components the legs fall back and are kept “empty”; she lifts the head and keeps it motile, also contributing to her orientation.
F activates further auxiliary synergists to stabilize herself in inverse position. At first F hugs M, so her arms generate friction on his back. Once she slowly slides down his back bends a bit more forward and the need for holding ceases. F now uses the arms for a different function: She throws her arms outwards into a full leg and arm spread – a canonical CI technique for stabilizing and balancing the body.
Thus, every phase of the lift involves its own components and sharing patterns, which explains why the qualitative analysis is a lengthy endeavor, once we go into detail.
Further evidence indicates that elements are subtly calibrated with respect to one another, such as F’s leg extension, the position of F’s belly on M’s back, and M’s stance, uprightness, and even rotation in space. A system of global adjustment between individual degrees of freedom is confirmed by the fact that dancers know exactly how to react to perturbations and contingencies. M emphasizes that his job as the lifting dancer is one of constant adaptation and of remaining “movable according to the weight that's supported.” We asked how he might have compensated if he had not been aligned to provide perfect support for F. He says that “as soon as something is off, you […] get under it [with an added step], you push a little bit harder here, you turn your head, […] giving more space through extending.” Timing also matters, for example if F were off balance a quicker or more forward motion by M’s torso could compensate for this. Finally, if M bends his back more this can make up for F sliding off. In fact, if he prevents F’s head from dropping fully the compensatory leg see-saw that she did may become superfluous. All this validates the claim that collective parameters are regulated through interdependent adjustments (see Solnik et al., Citation2015; Solnik et al., Citation2016).
The case study also illustrates the benefits of a stratified analysis of interpersonal synergy. We identified the lift’s wider functions and specific micro-actions undertaken to supply these. On the top sit macro-functions such as inner stability, vector alignment, or balancing weight on top during a lift, that is, the dyad’s overall success conditions. Subordinate to this, each dancer supplies a set of individual synergies such as bone alignment, such as contributing with a stable inner frame to support the weight of a partner. Yet smaller individual synergies group around this, such as using a leg or the head for adapting balance or intensifying one’s torso bending/twisting for optimally supporting the liftee when she slides downward. As expected, the lower levels frequently allow for greater variation, for example, F’s holding grip and then extending all four extremities were almost interchangeable means to ensure her balance on M’s back.
Some lessons
This micro-analysis illustrated how a sophisticated, yet unpremeditated synergy is created through a “skin-to-skin” interaction process. It highlights several general issues:
The first question is by which “assembly logic” two persons converge on a complex synergy. Apparently, sophisticated joint forms require a highly specific assembly process.Footnote5 Our acrobatic lift emerges as two dancers mutually “home in” on a possible, and to them attractive, resonance configuration. The full lift is only afforded once the two dancers have convergently entered a basic resonant constellation of their individual alignments, where a moderate amount of weight sharing indicates that they connect in a stable fashion. The dancers perceive this as a triggering affordance to proceed to the next, more risky stage at which F fully yields her weight and lifts off. To get the process started to begin with, the dancers exploit an already present synergy kernel, a term that I propose to characterize collective potentials in the offing (i.e., a particular type of affordance suggestive of a more complex synergy). Such a kernel was present by virtue of M’s habitual alignment of arms and legs; stable force lines running to the ground were in place to be exploited without any preparation. Once M had also projected himself upward into F’s inner structure, F superimposed her internal alignment geometry onto his alignment. The two internal architectures now structurally resonated with each other; the macro-scopic result directed weight through M’s base-structure down to the ground. This afforded a full transfer of F’s weight to M’s shoulders until she lifted off. Resonance configurations like this are characterized by structural “freebies” that arise once elements are configured in a specific way. They avoid exhaustion and are part of good general dance technique.
A second, related question is how this synergy assembly can be spontaneous. How can the interaction itself provide the medium of creation? Instead of actualizing an agreed-upon sequence, existing dynamics and structures are taken up ad hoc. As the dancers explore synergistic possibilities in their physical sharing, each micro-action by one person provides micro-affordances for the other or what Sudnow (Citation1978) terms a “springboard” constellation. We can refer to the spontaneous synergy assembly as mediated by mutual scaffolding: If the dancers reciprocally enable and complement each other with micro-actions that respect collective resonance principles, this provides mutual fit at each moment. The trickier question, however, is how the dancers create the specific progression of affordances, on the basis of which they can complexify the physical architecture from one second to the next in a meaningful fashion. This tends to happen only when four factors coincide: (a) a high-quality embodied communication process, in which partners recursively provide affordances for each other; (b) a joint interest in exploring and expanding synergy kernels such that one person starts adding to the kernel and the other joins in; (c) technical principles that privilege “organic” movement directions; and (d) adherence to largely automated task-dynamic principles once a form begins to take on shape, which rule out risky actions and constrain the interaction sufficiently, for instance to ensure that a lift ends in a stable landing. We can thus conclude that scaffolding between partners, the attractiveness of synergy complexification, biomechanical ease, and technical rules work hand in hand as constraints. A shared directionality can hereby arise without prior planning, and even if both dancers stay open to surprise, rerouting, or “bail outs.”
The third question is what sort of expertise all this requires. The dancers knew and respected collective constraints that a general type of lift operates within (see Hristovski et al., Citation2011), starting with its basic functionality, but also its risks, and esthetic “nice-to-haves” such as the stated wish to maintain flow and create a feel of “lightness” through continuous motion. Particularly, a keen understanding of structural principles emerges from our interviews, which define the collective physics of a lift. Dancers equally understand dynamic principles, as well as entry paths and precursor states that are needed. At both levels, they know their own role as well as their partner’s responsibilities. Finally, the dancers dispose of an adaptive toolbox of regulators, which they can selectively activate and mix at will. They know which specific tools to activate or down-regulate to respond to contingencies, for example, when they want to compensate for something the partner unexpectedly does.
Micro-analysis II
The second case-study focuses more on transitions between synergies of different kinds. It presents an eight-second sequence from another dance couple, which allows us to compare different points on the timeline with respect to how demanding and tight the synergy is. Accordingly, I will propose several concepts, which researchers may find useful in addressing taxonomical questions about synergy types.
Global event description
shows a spontaneous co-creation sequence with five phases. It begins with the female dancer (= F) and a male dancer (= M) running around in space with loose contact kept through F’s outstretched arm. The sequence of interest begins as they move closer to each other.
Figure 2. Synergy flow with multiple phases: The boxes beneath the images show complementary co-actions of the dancers; the color code indexes the kind of coupling at the respective moment. Source: Authors.
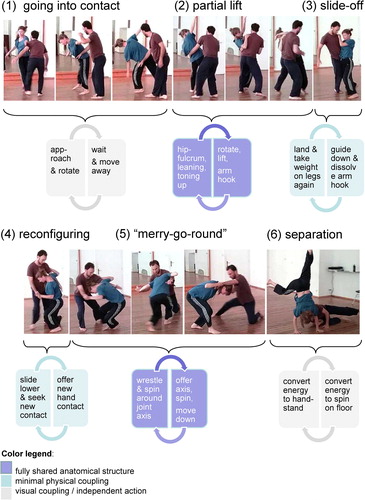
Going into contact (images 1–3): A phase of apparent “playing catch” ends, M stops, and F begins a reverse spiral to move closer until their torsos make contact.
Partial lift (images 4–6): The dancers create a fulcrum, axis positions, and joint body geometry, a potential preparatory movement and synergy kernel for side-lifting F. Instead, a low lift ensues with her legs still sliding on the floor, while M spins 180°.
Slide-off (image 7): F slides down to the ground again.
Reconfiguring (image 8): At this transitional moment, both dancers reorganize their spatial relationship and contact point after F lands and regains stability. F flexes her knees, points her head toward M and her lower hand finds his, which he offers, while her hand remains on his elbow.
“Merry-go-round” (images 9–11): An elastic rotation around a joint axis ensues, while the dancers remain connected through their arms and face each other; the movement first sweeps F outwards and continues with her giving a strong impetus to M that sends him backwards to the floor; he goes down on one knee and then fully.
Separation (image 12): to “process” the jointly created energy the dancers first separate one hand, then the other. M rolls over his back, while F goes into a cartwheel-like handstand in synchrony.
Preparation and low lift
We are now ready to take a closer look at the synergy dynamics of each phase. In the very first phase (images 1–3), F runs after M as if playing catch. Their only objective at this point is to stay close enough to not lose contact through the outstretched arm. M runs backwards one step and F follows. Then, M stops on two legs, now turning toward F who apparently wants to initiate fuller contact, which she does by moving her right leg backwards and initiating a spiraling move around her own axis. M waits a moment, with tiny backward steps to adjust. As F spirals, her torso is bent sideways; she lifts her arm diagonally to make space for their flanks to touch; a mid-body contact ensues.
In the next phase (images 4–6), an intense synergistic sharing pattern emerges. M slightly moves under F and supplies an arm hook around her body to pull her closer and into a low lift, while her feet slide on the ground. To do this, M utilizes the connection of body centers and a fulcrum at the hips. By stepping sideways M rotates F forward and then lands her as she slides off his hips. This lift remains partial since F stays in a relatively low position and is merely taken into a rotation in which her legs slide on the ground. Both dancers agree that they were preparing for the possibility of a higher lift and as “it didn't work out so we did this other version that was created spontaneously in the moment.” For both of them the hip fulcrum was a recognizable, indeed canonical springboard constellation for a possible high lift. However, a creative variation with unique properties followed instead: “We had a moment of rise that didn't take the pathway [shows up with her arm]. It could have taken going up all the way – on the shoulder or really a lift because it fell, it dropped. But we took that drop then to [shows a straight forward movement] […] to make something that goes into space.” The likely explanation for this is that the affordance for a higher lift remained absent due to F arriving a bit too high in relation to M’s torso; another possibility is that the affordance was there, but not ideal, and M did not want to invest the extra effort in a non-ideal constellation. Yet another interpretation could be that the dancers simply decided to reject the high-lift as being too much of a CI cliché. However, since they both agree they reckoned with a full lift, the explanation is likely that the missing or low-quality affordance inspired the creative variation.
As in our first case study, we can now systematically take stock of components, sharing patterns, and their collective functionalities:
M prepares by moving his pelvis under F’s center of weight, a logical prerequisite for (the option of) doing a lift. This establishes the requisite hip fulcrum and ensures that F does not slide off. Micro-timing is equally crucial here. M explains how being “on time” when merging centers of weight matters: “[You] get beneath it when her center is on an upward trajectory so that you are again merging with the weight in this direction rather than the way it's coming down.” The skill is to smoothly pick up the momentum of falling weight: “I am leaning back to bring the center onto my support at the same time continuing the momentum that we have in that rotational vector.” Recognition of the tipping point/apex of the natural ballistic arc is equally crucial: “It's important to sense and feel that arch of weight. And when the weight starts to come down, to allow it to come down rather than muscularly holding it up.” Similar to case study 1, this quotation exemplifies how skilled movers create a resonance pattern with the effects of gravity, which in this case is a matter of proper timing. The dancers are able to modulate the ballistic dynamics that are already in progress so that beneficial self-organizing properties can be “chartered.”
Both dancers contribute to a close center-to-center relation between their bodies, with F’s right flank lying on M’s sternum area. This proximity of body centers stabilizes their connection and hereby ensures a safe lift. F mentions that part of this is “to orient the whole body slightly toward him, rather than staying open or behind. Not just the arm but even the whole left side. So I am kind of curving my spatial relation toward him, toward his mid-line.”
To ensure staying up for long enough, F hooks her right arm on M’s left shoulder: Once this prerequisite is in place, F pushes her torso upwards while connecting her open-hand arm with M’s center. M explains that this is not only for F’s sake, but has a function for both of them: “So since she's connecting through the center through her arms, then I have access to the center through the periphery” (i.e., M can feel and manipulate the center).
F adjusts muscle tone to be a stable “object” for lifting. The combination of the latter two aspects facilitates the lifting for him (and, as she begins to fall again, to handle the momentum).
F slightly makes herself more liftable by pushing up, just as M begins to lift her. She also brings her body axis off-balance by tilting it and leaning diagonally into M’s left arm; she hereby transfers weight away from her feet and to her partner.
F’s off-balance axis requires immediate reciprocation by M, who counterbalances by leaning backwards in order to keep F’s center of weight close.
From this mutual coordination a dynamically stable collective weight system emerges and enables M to transfer F’s off-balance momentum into the lift.
Another mutually coordinated relational parameter is the inter-body geometry (almost parallel, just slightly tilted off the vertical axis); its preservation allows for a fast and elegant later landing.
The combination of these many elements supervenes on previously established communication channels with and a particular attentional orientation toward the partner (see Kimmel, Citation2016, Citation2019). This prominently includes connecting with the partner’s body/weight center. M says: “I can see where her center is and I imagine where her center is. But also through the periphery with the arms, I can feel into her structure through the arms and skin.”
Finally, both dancers mention important prerequisites of self-management inside their own bodies that positively impact the collective-level coordination. This includes relaxed and responsive muscle tone management, connecting one’s body periphery to one’s own center, and awareness of gravity with respect to the body axis moving in space. For the liftee, F, relaxed muscle tone of the legs (so they can swing) and of the whole body is important. This avoids drag during the lift. However, the legs must increase their activity again with the right timing to provide a “landing gear.” This last observation shows that certain parameters are re-scaled even within the execution of a single “thin slice” of our analysis.
Centrifugal energy and converting it
The rest of the sequence will be described slightly more concisely, as there was too little interview time left for full analytic detail: There is a brief intermission that lands F on her feet again and during which they reorganize the contact points. Then, a completely new kind of synergy begins: In images 9–11, we see a wrestling-like (“play-fight”) counter-position in which both dancers hold onto each other (shoulder-to-hand and hand-to-hand). At first F – now in almost a crouching position – is swept outward by the joint momentum and the dancers move on a semicircle, with M almost at the center and with F more at the periphery. The next moment forces are reversed as F pushes forward vigorously and into M, making him go backward. The two dancer’s push-and-pull connection is used for generating centrifugal rotation around a joint axis, much like a merry-go-round, with a sharp (if elastic) reversion of the direction of force, which happens midway in the rotation.
Image 12 shows the outcome. Both dancers convert their momentum into rotational energy, which, as F emphasizes, is necessary to avoid crashing into the ground. M does so by rolling over his back to the floor without yet losing contact. One of M’s hands separates as soon as he needs it to arrive on the ground. F stays in her shoving motion for a very short moment using the hand that still touches M, and then goes after him. While F is still pushing into him, M ceases all counter-force. What happens then is hard to tell from the video alone. Either F’s momentum continues, because resistance is taken away, or M’s momentum actively pulls her in the direction of his falling. On the first reading, there would be a sudden switch of the collective force-dynamic pattern from resistance to non-resistance that creates a physically self-organizing pattern between the two dancers.
To convert her momentum, F now uses her free hands for a cartwheel-like handstand. The connection of the dance partners through the other hand is still intact at first, but just before F’s hand touches the floor they break it. It is interesting to observe that both dancers rotate in synchrony and along fully parallel axes (F’s handstand’s axis naturally is slightly higher than that of M’s straddle role on the ground). This may be an outcome of the synchronized energy boost to both bodies, but perhaps also a partly orchestrated joint channeling of energy.
Synergy flows
As a whole, this event of about eight seconds displays quite distinct stages of collective synergy. I propose to speak of a synergy flow when different synergies emerge out of each other in continuity. Synergy flows provide us with a window on extended task dynamics, when a continuous interaction transits from one collective parameter and sharing pattern to the next. This applies both to multistage tasks such as a lift (preparation; lifting; landing) and in transitions such as between the lift and the “merry-go-round” (see Saltzman & Munhall, Citation1992 who refer to changes in the general system makeup as graph dynamics). On the one hand, the study of synergy flows highlights continuities within discontinuity. Even when some aspects change rapidly, extant elements may be used and built on. On the other hand, moments of sharp transition can inform us about how action continuity and rapport are maintained, even while the individuals re-negotiate the collective parameter. Synergy flows therefore offer a good way to study how transitions are jointly managed. Finally, the study of synergy flows benefits comparative sensibilities in a heuristic way, since different snapshots can vary quite a bit. Let us conclude the case study by proposing some contrastive dimensions:
First, the synergy medium did evidently change over time, a fact which distinguishes with a color code in the subscripts to the images. The event starts with almost nil mechanical coupling (images 1–3). F’s arm touches M in the function of a “feeler” mostly (informational coupling), but hardly transfers momentum. Right afterward, this changes into two strong anatomical co-dependencies (images 4–6; 9–10), separated by a brief transition during which the contact point is reorganized (images 7–8). Finally, as the dancers separate, the centrifugal momentum they have created together is channeled independently into a cartwheel and back roll. Hence, the process moves from (a) dominantly informational coupling to (b) a fully physical codependency as the fulcrum and arm hooks initiate the lift, (c) back to a mainly informationally coupled transition phase, (d) to mechanical push-pull in the merry-go-round, and (e) to complete separation, where it is debatable if we can speak of real synergy anymore.
Next, we may speculate about how synergy strength evolves, that is, the dancers’ functional codependency vs. autonomous degrees of freedom. This is the highest in the low lift in images 4–6; it intermittently shrinks at the moment of landing; as soon as the “wrestling” pattern establishes a strong push-pull force and creates centrifugal acceleration synergy strength grows again. Thus, a highly demanding joint physical architecture is needed to keep, both, the lift and the “merry-go-round” going, whereas in between greater degrees of freedom arise. (More generally, ballistic situations and other demanding lifts tend to require tight synergistic coupling, since they do not allow for an endless number of safe continuations and since dancers must look after one another here.)
Next, we can speak of synergy complexity, which refers to the number of components the dancers have to supply and which may index the involved level of coordinative skill. During the lift, numerous components were mentioned. In the phases before this as well as in the transition after it the dancers mention fewer elements that challenge them. The complexity of the centrifugal synergy on the ground is harder to evaluate, since we have no complete data, but seems fairly complex at least.
We can speak of synergy sensitivity as the ability to compensate for missing components without changing the overall dynamic; in other words how “forgiving” the task is in face of imprecision. Although this index is analytically separate, it seems that it runs in parallel to complexity here. Compared with the initial moments sensitivity grows during the lift, that is, any synergist missing changes the dynamic, say imprecise geometry or a missing fulcrum.
Note that despite all these changes over time continuity between synergies is high in our example. There is no apparent rupture of contact. Even at the transition the dancers keep negotiating their dynamics so effectively that the movement keeps flowing. Possibly, this reflects a general CI trend for co-action patterns to be continuous, although sharper transitions occasionally occur (Torrents et al., Citation2016; Torrents et al., Citation2010).
In terms of synergy participation, F at first assumes more initiative when she goes into contact, and then, the patterns are co-equally responsible for everything that happens. In terms of roles, both dancers give active assistance to one another and manage a slightly risk-laden situation through precise mutual adjustment.
There are also some general synergy properties that remain invariant across the whole event. The basic synergy constellation remains dominantly collaborative. No one tries to manipulate, coerce, or even take over the partner’s body, although both dancers “listen” to and incorporate feedback of the partner at each stage. The moment that comes closest to manipulation is when F shoves M away so that he has no choice but to roll. Also, the modal genesis of synergy remains the same throughout: The synergies are spontaneously created and arise through the negotiation process, which is to be expected in the CI domain, but may be less to be taken for granted in other domains.
To conclude, synergy flow properties can be analyzed along various axes; accordingly, several synergy indices are proposed here for future research and show just how many questions can be asked about the types of interpersonal synergy.
Theoretical perspectives
The aspects of interpersonal synergy that emerge from the case studies fall into two complementary analytic foci: a structural and synergy-dynamic focus. I will now discuss perspectives of both kinds, before asking how spontaneously improvised synergies of a complex sort are possible.
Structural aspects of collective synergy
Structural synergy inquiry aims to understand inter-body structures with respect to their organizational logic and underlying collective physics. It addresses how contributions to a collective pattern fit together and which principles individuals follow to constrain and adjust these. It can be a considerable asset for scholarship to tap into how experts subjectively conceptualize collective physical principles and to ask about their technical knowledge, for example, with respect to how the organization of one body can be effectively extended into another body.
In terms of collective physics, case study 1 illustrated how an aligned geometry between the two bodies gives rise to a stable lift architecture, while directing weight through the skeleton into the ground. Other forms of possible architectures include weight sharing, counterbalance, “stacked” bone alignment, connective muscle arcs, vector configurations, levers, as well as self-stabilizing tensegrity configurations, which combine skeletal struts with the elastic pull of the fascia. In some cases, several of the named principles may be combined. For example, Kimmel and Schneider (Citationforthcoming) illustrate how two acrobats complexify a lift architecture based on skeletal “stacking” by adding an element of counterbalance once the stacked structure has been sufficiently stabilized. The same paper, in the context of martial arts, analyzes how individuals cleverly manipulate a shared material connection through the arms to throw an opponent off balance.
When we describe interpersonal synergies from the structural viewpoint, we may frequently be able to contrast more invariant “core synergies” that have to be in place at all costs with flexible “task peripheries.” A typical example is a requisite geometry between the two torsos, but with variable foot positions. Future research should address what variability is admissible (compare “good” vs. “bad” variability in an uncontrolled manifold as posited by Latash et al., Citation2007; Scholz & Schöner, Citation1999), what the range of equifinal solutions is, and when weak or partial sharing suffices (cf. Bourbousson et al., Citation2010).
Similarly, structural inquiry needs to investigate “nested synergetic couplings in systems in which both intra- and interpersonal coordination occur simultaneously,” where the challenge is to “coordinate their movements with other individuals or environmental stimuli without sacrificing the stability of their own intrapersonal coordination” (Coey et al., Citation2011, p. 492). Intrapersonal coordination can be relatively stable even within an interpersonal synergy (cf. Sofianidis et al., Citation2015), but it is by no means evident that this is possible for all tasks and at all skill levels. There exist more complex tasks in which connecting makes certain individual synergies disappear, as a study on joint jumping would indicate (Slomka et al., Citation2015). Thus, complex forms of inter-adaptation across the synergy hierarchy pose many questions, with a wide range of possible associated regulation strategies.
An altogether neglected topic concerns how “structural intelligence” makes situated synergies possible in the first place (see Pfeifer & Bongard, Citation2007). This refers to semipermanent basic configurations, whose structural features simplify and guide cognitive regulation strategies. Notably domain-specifically habituated bodies frequently provide core constituents for a wide range of synergies by virtue of proper internal alignment, posture, balance, breath, or muscle tone. Without these habits a full synergy needs to be laboriously built from scratch; with habits in place it can kick in without further preparation. For example, Kimmel and Schneider (Citationforthcoming) argue that partner exercises of the martial art Tai chi (the so-called push-hands) are based on habitually pre-organized uprightness, groundedness, and internal connection. On this basis, the lower-body muscles can generate force to push the opponent through one’s whole body structure, or the practitioners exploit a rebound effect based on this habitual inner organization, which serves to channel the opponent’s push downwards against the ground. What examples like these indicate is that the notion of habit needs to be given a reading as a basic, albeit unspecific building block for variable synergies. More generally, in terms of “structural intelligence,” clever body arrangements lend themselves to specific self-organizing couplings with external features like gravity or floor resistance. This seems analogous to the mechanical arrangement of the “Watt’s governor” that is utilized for homeostatically regulating steam engines (Van Gelder, Citation1995).
Yet another inquiry concerns the wide possible diversity of codependency relations between individuals, such as mutual facilitation, imposing constraints on a partner, or competitive counteraction. In terms of sharing patterns, we can contrast general kinds of “division of labor” such as parallel vs. alternating actions (Bell & Kozlowski, Citation2002; Reynolds & Salas, Citation2015), mirror-symmetric vs. complementary movements, element aggregation vs. deep fusion (Araújo & Davids, Citation2016). Sharing patterns at a smaller scale can involve body segments that are temporarily “frozen” to move together (coalitions in Turvey et al., Citation1978), or inversely new behaviors may arise by decoupling previously integrated body parts (Goldfield, Citation1995). Also, linkages can be initiated from different ends in a chain (Kimmel et al., Citation2015).
Degrees of synergy can similarly be contrasted: Some may have very strict coupling requirements, and others may be selective and allow subordinate individual autonomy or even partial decoupling. A frequent phenomenon involves functionally co-specifying sub-synergies that remain relatively isolated because they are independently controlled, for example, when an acrobat begins a handstand on the partner by shifting only the upper body weight on the hands while the lower body remains connected to the floor, or when the lower body of a Tango dancer does independent footwork while the torso remains stable and communicates with the partner.
Finally, the physicality of synergies is important to consider. Dancing at close quarters involves shared materiality, in which sensorimotor interpenetration makes available tremendous information about the partner and which affords creating push-pull effects with almost zero delay. As the present case studies suggest, shared materiality is also an asset for creativity itself, which seemingly benefits from immediate, highly responsive scaffolding effects and allows individual action impulses to blend in novel ways. Furthermore, the structures that underlie physical sharing raise important questions about resonance techniques (see Raja, Citation2018; Ryan & Gallagher, Citation2020), which both case studies have illustrated. Improvisers are known to use gravity, momentum, bone alignment, elasticity of tissue, or breathing rhythms effectively so that they optimally resonate with the environment or the partner’s body, thus exploiting self-organizing properties of the physical coupling (Kimmel et al., Citation2018). This is somewhat similar to how infants modulate the impedance of their legs so that spring properties can arise when they interact with gravity and the floor (Goldfield et al., Citation1993; Holt et al., Citation2006).
Synergy dynamics
Complementarily, a dynamic focus is important, which aims to understand synergy build-up, evolution, and transitions. In the case of our micro-phenomenological approach, this was based on reconstructing the ongoing embodied communication that mediates the process.
At the micro-timescale, this focus sheds light on synergy assembly in terms of what gets activated when, how earlier elements constrain later ones, what component takes the lead, which degrees of freedom are narrowed down immediately, and which are kept responsive. A micro-dynamic focus equally clarifies if synergies require specific assembly progressions. Some synergies may auto-catalyze as soon as enough components are present, while others require key components to be supplied first, which then “attract” others. By a similar token, some assemblies may show instant fit, while others require preparatory adjustments, gradual complexification, or step-wise “homing in,” for example, by first freezing and then releasing certain degrees of freedom (Latash, Citation2010; Renshaw et al., Citation2009).
The next higher timescale of several seconds moves synergy flows into analytic focus and highlights how elements and sharing patterns co-evolve with the task. Even the degree of coupling can change repeatedly. As the second case study showed, coordination can be tightly controlled for a specifically difficult lift situation, only to be relaxed again once the feet are back on the ground.
Across all analytic timescales an important question to ask is how synergies co-exist, incorporate each other, and how individual complexify or withdraw components (Araújo & Davids, Citation2016; Turvey, Citation2007). They may tone down, suppress, or augment components through further “players”; they may activate components “standing by” in readiness; or they may modulate their phasing relations (cf. von Holst, Citation1939). Sometimes a whole set of components changes at once, at other times components are rescaled one after the other and make the overall pattern develop more incrementally.
Another dynamics-related research question is how complex collective functions arise when the effects of several well-sequenced synergies cumulate, as in our analyzed lift example. A similar process logic applies to the martial art Aikido, where defeating an attacker needs to be based on a process of evasion, taking up and then diverting the attacker’s energy, throwing, up to a final fixation (Kimmel & Rogler Citation2019) . This cumulative logic is required because the impending threat needs to be first defused before the defender can progressively narrow the opponent’s degrees of freedom until full control can be achieved.
Analyzing synergy assembly is well worthwhile in two different contexts. The first of these concerns relatively pre-agreed interaction forms, as in partner acrobatics (see Kimmel & Schneider, Citationforthcoming), where experts build synergies of an extremely precise sort, such as a handstand on the partners outstretched arms. Apparently, such techniques are best realized as routines due to their exacting practice requirements. Ongoing work by my team suggests that, to coordinate their interaction, acrobats draw on (partly) shared event schemas and on cue signals developed through their joint practice history. This is interesting in view of debates about preprocess coordination (Eccles & Tenenbaum Citation2004; Steiner et al., Citation2017) where prior shared knowledge partly constrains synergy assembly in addition to real-time participatory practices (Araújo et al., Citation2006; Seifert & Davids, Citation2017; Gesbert et al. Citation2017; cf. Knoblich et al., Citation2011, p. 85ff.)
However, a dynamic analysis has equal merits regarding spontaneous synergy assembly, as we see it in CI. A central benefit is that we can unpack processes of interaction-based creativity step by step (Kimmel & Hristova, Citationaccepted). A fine-grained analysis can shed light on how recursive interactions generate novel synergies and, in some cases, how creativity may no longer be attributable to any individual, but emerge from a distributed process (Sawyer, Citation2003; Sawyer & DeZutter, Citation2009). In such cases, creativity genuinely arises from multiplicative features of the interaction. A micro-analysis thus allows us to observe “in vivo” how novelty enters the world and how improvisers prepare the ground, create openings, or impose constraints for creativity to arise in self-organized ways.Footnote6
Improvised coordination
Analyzing the micro-genesis of spontaneous synergy can clarify the relationship between improvisation and coordination. As we have seen, in CI dancing no individual “directs” the joint action, as would be the case in leader–follower dances. Nor do pre-given task constraints direct self-organized coordination (as is the case in most experiments). Instead, the task arises as coordination itself arises, namely through bidirectional embodied negotiation.
Whereas many CI beginners start with standard techniques, especially when acrobatics are involved, and coordinate through meshplan-like conceptualizations of “who does what when” (Pacherie, Citation2006),Footnote7 CI dancers at the expert level are emphatically disinterested in “ready-made” forms. They take pride in negotiating synergies each moment at a time and deem openness to surprise a virtue. The information exchange with the partner is accordingly fine-grained and actions responsive; expert dancers train to not prematurely commit the sensorimotor system. They “stay in the present moment” and accord supreme importance to “not anticipating.” Or, if they do so at some higher level, they try to leave their motor intentionality untainted by this (see Pacherie, Citation2006 for this differentiation of levels, which maps nicely on phenomenological distinctions drawn by experts). Whenever they notice having unduly “primed” their sensorimotor system they take themselves to task for this. This is imperative to keep at bay the constant risk of mismatching actions, disruptive surprises, and co-actions of a partner that physically interfere with one’s own ongoing activities.
The explanation of how minute coordination is possible under these circumstances clearly must be based on guidance from real-time affordances (Marsh, Richardson, et al., Citation2009; Marsh et al., Citation2006), which is squarely confirmed by what experienced dancers report. To operate with improvisational flexibility in a dynamic-relational field and to produce new collective behaviors presupposes (a) specific cognitive and sensorimotor skills, (b) a convergence of constraints that assures collective meaning, and (c) the ability to operate at multiple ecological scales. I will now discuss these three synergy prerequisites in turn.
Unsurprisingly, acquiring malleable tools for the real-time assembly of movement is an essential training aim in CI. To begin with, a backdrop of reactivity, readiness, and high-quality communication must be in place, together with perceptual skills for reading never-experienced contexts in terms of their affordance-specifying invariants. Next, a sizable, dimensionally differentiated repertoire of regulatory tools is needed, together with the ability to activate “on-demand,” selectively mix, and recombine this set of dynamic primitives (Hogan & Sternad, Citation2012). When novel mixes of dynamic primitives are created, this requires an anticipatory feel for summary effects (Kimmel, Citation2019), or else the ability to rapidly accommodate surprises.
Expressed theoretically, CI dancers become adepts of soft assembly at an interpersonal level. The notion of soft assembly (Kello & Van Orden, Citation2009; Kugler & Turvey, Citation1987) refers to elements of a generative system that are organized for a task in a temporary and context-sensitive way – the opposite of deploying routines based on “hardwired” schemas.Footnote8 The conceptual emphasis lies on (a) flexible compositional synthesis, (b) plasticity of the system, and (c) dynamic incorporation of external resources (Schiavio & Kimmel, Citation2021). In CI experts, these criteria are clearly confirmed by the selective activation and finely adapted combination of dynamic primitives with all but minimal anticipation, the frequent occurrence of unique and novel forms, as well as the dancers’ skills for exploiting environmental or interpersonal resonance.
Evidently, the ability to selectively activate and mix dynamic primitives in small increments satisfactorily explains the flexibility and productivity of individual improvisers. However, how these basic abilities might extend beyond the skin and contribute to a meaningful co-assembly between two agents is less evident. Our micro-genetic approach provided answers here: To co-assemble meaningful collective behaviors, each individual must (a) orient toward what the collective dynamic affords at each moment, (b) dynamically complement the partner’s concurrent actions, (c) and do so without anticipating or making actions chunky. This complementation can be playful and exploratory to some extent, but will often gravitate toward collective resonance patterns and optimal biomechanic ease. It can even involve co-assemblies that complexify the coordination and thus create remarkable path-dependent effects such as lifts. In effect, these improvised co-assemblies can only become meaningful thanks to a convergence of constraints. Joint improvisers continuously operate in a “force-field” of interpersonal affordances, a tendency to seek biomechanic resonance, adherence to technical and safety principles, as well as short-lived task dynamic constraints such as the need to regain safe grounding after a lift or jump.Footnote9 Only with this set of constraints will a process of dynamic complementation effectively converge on interpersonally meaningful synergies.
A final complexity, which makes improvising together considerably more difficult than solo improvisation, is that interpersonal soft assembly inherently operates at multiple ecological scales and creates nested synergies (cf. Coey et al., Citation2011): The challenge is to regulate individual functions such as balance and grounding, while adding to collective ones such as partner support. Either a compromise is sought that keeps individual-level adaptations small enough not to negatively impact the collective coordination or a clever “simplex” solution is found that works at both levels, as a study on Tango dancing suggests (Kimmel, Citation2016).
In sum, the micro-scale analysis of interpersonal soft assembly provides insights about how two individuals may successfully converge into synergy and about the necessary constraints and cognitive organization improvisers must master to operate without planning ahead, yet also operate meaningfully in a dynamic, relational field. These insights help us to extend the theoretical scope of ecological psychology toward improvisational interaction of a sophisticated sort.
Conclusion
To vary an old adage, few things are as practical as a good method. The micro-phenomenological reconstruction of interaction-based synergies provides a versatile tool, with applications ranging from interaction routines to joint improvisation. A thoroughly qualitative process analysis of high zoom factor takes patience, yet makes up for it with high descriptive and theoretical payoffs.
The proposed protocol works its way up from individual experiences to a reconstruction of interdependencies and multiplicative effects. A fine-grained action score is created, a “who does what when”, to capture the assembly and evolution of an intercorporeal synergy “in vivo.” The protocol targets perceptual triggers and action regulation tools from both perspectives in order to take stock of required components, explain how they connect, and how a collective functionality emerges from this. The result is a time-sensitive reconstruction of situated synergy emergence, which taps into the experts’ rich knowledge of principles of collective physics.
Based on a quite free form of improvisational partner dance, our two case studies “unpacked” how biomechanically demanding, yet spontaneous synergies emerge by virtue of ongoing embodied communication. Accordingly, the physical and informational processes of scaffolding between two dancers were analyzed, for instance with respect to how so-called synergy build-up kernels are picked up on to complexify the interaction or regarding how one partner provides springboards for the other. It was demonstrated that unique and improvised synergies can emerge through a combination of exploration interests, resonance-seeking behavior, adherence to technical principles, and mutual scaffolding.
In this way, we unpacked the circular causality between the micro-level of individual action and the macro-level of collective emergence. Readers will have appreciated that bootstrapping the collective analysis from subjective meanings is neither a form of methodological individualism, nor does it imply lack of rigor. Instead, a “view from within” (Varela & Shear, Citation1999) allows addressing neglected questions effectively, notably concerning micro-scale processes of synergy build-up, evolution, and transition, the analysis of collective physics, and the question how experts regulate the collective level through their own body (i.e., scale interdependencies).
Overall, the proposed research format strikes a suitable balance between three important aims: (a) faithfulness to subjective sense-making, (b) a fine-grained analysis, and (c) descriptiveness regarding non-observables such as proprioception, internal or otherwise hidden micro-actions, imagery, anticipation, trigger percepts, exploration interests, or perceived constraints.
On the applied side, the method offers a didactic tool for teaching interaction skills. An inventory of synergy components and sharing patterns is precisely what trainers go through with novices, who may directly benefit from a detailed “process audit” of synergy processes. Similarly, the systematic self-reflection of practitioners stands to benefit. On the scholarly side, this approach complements aggregate measures, which frequently cloak micro-aspects of synergy evolution as well as underlying skills. The method may contribute to popularizing qualitative modeling more, perhaps following other fields of expertise research (e.g., Klein, Citation2008) and cognitive science (Steffensen, Citation2013), but it can also contribute to brokering with quantitative research. To speak with Gallagher (Citation2003), it is possible to “frontload” micro-phenomenology into quantitative designs; furthermore, there is now a rich tradition of approaches that mix and cross-validate the two types of methods (Bitbol & Petitmengin, Citation2017; Froese et al., Citation2011; Kimmel & Preuschl, Citation2015;). I close with the hope that the proposed tools will doubly facilitate cross-talk: on the one hand between scholars, practitioners, and trainers, as well as, on the other hand, between skill theory, interaction research, ecological dynamics, sports psychology, sports sociology, dance & somatics, arts-based research, and related fields.
Acknowledgments
The research design was created with the help of Kerstin Kussmaul and Dayana Hristova. The former played a central role in interviewing and data analysis, while the latter helped with the basic data compilation and the pre-analysis. I would also like to thank all informants who participated in the study and who let us use their images. Stefan Schneider, Robert Hristovski, Dayana Hristova, and Ad Foolen provided valuable comments to previous versions of the text, as did two anonymous reviewers. Priscilla Hill kindly helped with the proofs.
Additional information
Funding
Notes
1 Stability owes to elements co-adapting to stabilize the macro-scopic task, e.g., when one component is blocked, fatigued, or injured the ensemble rapidly compensates for this (Saltzman & Munhall, Citation1992) or further components are incorporated “on demand.” As to flexibility, every task allows a certain range of variance in orchestrating the available degrees of freedom (Latash & Zatsiorsky, Citation2016). Flexibility is inherent in how skilled individuals organize their behavior, since certain dimensions inherently require tighter control than others (Scholz & Schöner, Citation1999) or when needed, stability-inducing variables can be lowered so that they do not obstruct desired change (surveyed in Latash, Citation2019).
2 The shared functionality of an interpersonal synergy can however be indirectly mediated, for example, if several players of one soccer team orient themselves relative to the opponent who holds the ball (Gesbert et al., Citation2017).
3 However, it cannot be generalized that joint performance gets superior results by virtue of visual or haptic coupling. Quite on the contrary, it can even make individual synergies disappear (see Slomka et al., Citation2015). It is also not necessarily the case that stable optimization criteria are available in coupled interaction, compared to what is possible in individual motor synergies (Solnik et al., Citation2015).
4 It seems that M, as he rises to full length, contributes by giving F’s leg a brief impulse, adding to her tilt over his shoulder and bringing her head down rapidly. F’s hanging legs signal to M that he can now manipulate her weight himself.
5 Given that encompassing synergies can be distributed in time like this, it would be too narrow to define synergy in terms of time-locked activations and coherence producing synchronization phenomena, as Nowak et al. (Citation2017) suggest. This would reduce the inquiry to how elements establish coherence at a particular moment in time. Beyond this, scholars should also investigate how temporally extended synergy effects cumulatively arise from the “trail” of previous states.
6 For example, our CI informants emphasize how they strive to keep the dynamic “lively” and at the brink of multiple possibilities (i.e., metastable as Hristovski et al., Citation2009 and Pinder et al., Citation2012 would term it) and sometimes report seeking out spaces of the interaction matrix together where surprises – and perhaps unique synergies – become more likely (Kimmel et al., Citation2018).
7 Meshplans, however, are inflexible, which frequently makes dances of novices seem too calculated and stereotypical in the eyes of experts. Meshplans also require hoping that the partner has the same sequence in mind, unless the couple has communicated about this explicitly. Actualizing pre-planned sequences is thus not only uncreative, it also has practical disadvantages if the need arises to adapt the coordinative pattern or to reroute on-the-fly. Although experts may sometimes use standard techniques in a flexibilized fashion (e.g., as adaptation of a prototype or hybrid form), if they do so, they remain poised for shunting between different pathways of the dance matrix.
8 Soft assembly is no simple “either-or,” though. Even when a routine synergy is created, precise timing and movement details tend to be softly assembled, since these aspects elude precise pre-planning. In addition, it is conceivable that externally very similar forms are softly assembled by one person and created in schema-based ways by another.
9 Two domain-specific constraints add to this in CI: (a) the tendency to provide enabling or only moderately challenging complementation and (b) the frequent presence of shared exploration interests or theme preferences that have crystallized in the dance history (Kimmel et al., Citation2018).
References
- Anderson, M. L., Richardson, M. J., & Chemero, A. (2012). Eroding the boundaries of cognition: Implications of embodiment(1). Topics in Cognitive Science, 4(4), 717–730. https://doi.org/10.1111/j.1756-8765.2012.01211.x
- Araújo, D., & Davids, K. (2015). Towards a theoretically-driven model of correspondence between behaviours in one context to another: Implications for studying sports performance. International Journal of Sport Psychology, 46, 268–280.
- Araújo, D., & Davids, K. (2016). Team synergies in sport: Theory and measures. Frontiers in Psychology, 7, 1449. https://doi.org/10.3389/fpsyg.2016.01449
- Araújo, D., Davids, K., & Hristovski, R. (2006). The ecological dynamics of decision making in sport. Psychology of Sport and Exercise, 7(6), 653–676. https://doi.org/10.1016/j.psychsport.2006.07.002
- Axelsson, A., & Jansson, A. A. (2018). On the importance of mental time frames: A case for the need of empirical methods to investigate adaptive expertise. Journal of Applied Research in Memory and Cognition, 7(1), 51–59. https://doi.org/10.1016/j.jarmac.2017.12.004
- Bell, B. S., & Kozlowski, S. W. J. (2002). A typology of virtual teams: Implications for effective leadership. Group & Organization Management, 27(1), 14–49. https://doi.org/10.1177/1059601102027001003
- Bernstein, N. A. (1967). The coordination and regulation of movements. Pergamon Press.
- Bitbol, M., & Petitmengin, C. (2013). A defense of introspection from within. Constructivist Foundations, 8(3), 269–279.
- Bitbol, M., & Petitmengin, C. (2017). Neurophenomenology and the microphenomenological interview. In S. Schneider & M. Velmans (Eds.), The Blackwell companion to consciousness (2nd ed., pp. 726–739). Wiley & Sons.
- Bourbousson, J., & Fortes-Bourbousson, M. (2016). How do co-agents actively regulate their collective behavior states? Frontiers in Psychology, 7, 1732. https://doi.org/10.3389/fpsyg.2016.01732
- Bourbousson, J., Sève, C., & McGarry, T. (2010). Space-time coordination dynamics in basketball: Part 2. The interaction between the two teams. Journal of Sports Sciences, 28(3), 349–358. https://doi.org/10.1080/02640410903503640
- Chemero, A. (2016). Sensorimotor empathy. Journal of Consciousness Studies, 23(5–6), 138–152.
- Coey, C., Varlet, M., Schmidt, R. C., & Richardson, M. J. (2011). Effects of movement stability and congruency on the emergence of spontaneous interpersonal coordination. Experimental Brain Research, 211(3–4), 483–493. https://doi.org/10.1007/s00221-011-2689-9
- Correia, V., Passos, P., Araújo, D., Davids, K., Diniz, A., & Kelso, J. A. S. (2016). Coupling tendencies during exploratory behaviours of competing players in rugby union dyads. European Journal of Sport Science, 16(1), 11–19. https://doi.org/10.1080/17461391.2014.915344
- Crandall, B., Klein, G., & Hoffman, R. (2006). Working minds. A practitioner’s guide to cognitive task analysis. MIT Press.
- Cuijpers, L. S., Den Hartigh, R. J. R., Zaal, F. T. J. M., & de Poel, H. J. (2019). Rowing together: Interpersonal coordination dynamics with and without mechanical coupling. Human Movement Science, 64, 38–46. https://doi.org/10.1016/j.humov.2018.12.008
- Cummins, F. (2013). Towards an enactive account of action: Speaking and joint speaking as exemplary domains. Adaptive Behavior, 21(3), 178–186. https://doi.org/10.1177/1059712313483144
- de Poel, H. J. (2016). Anisotropy and antagonism in the coupling of two oscillators: Concepts and applications for between-person coordination. Frontiers in Psychology, 7, 1947. https://doi.org/10.3389/fpsyg.2016.01947
- Depraz, N., Varela, F. J., & Vermersch, P. (Eds.). (2003). On becoming aware: A pragmatics of experiencing. John Benjamins.
- Di Paolo, E., Cuffari, E. C., & De Jaegher, H. (2018). Linguistic bodies. The continuity between life and language. MIT Press.
- De Jaegher, H., & Di Paolo, E. (2007). Participatory sense-making: An enactive approach to social cognition. Phenomenology and the Cognitive Sciences, 6(4), 485–507. https://doi.org/10.1007/s11097-007-9076-9
- Dreyfus, H., & Dreyfus, S. (1999). The challenge of Merleau Ponty’s phenomenology of embodiment for cognitive science. In G. Weiss & H. F. Haber (Eds.), Perspectives on embodiment: The intersections of nature and culture (pp. 103–120). Routledge.
- Duarte, R., Araújo, D., Correia, V., & Davids, K. (2012). Sports teams as superorganisms: Implications of sociobiological models of behaviour for research and practice in team sports performance analysis. Sports Medicine, 42(8), 633–642. https://doi.org/10.2165/11632450-000000000-00000
- Eccles, D. W., & Tenenbaum, G. (2004). Why an expert team is more than a team of experts: A social-cognitive conceptualization of team coordination and communication in sport. Journal of Sport and Exercise Psychology, 26(4), 542–560. https://doi.org/10.1123/jsep.26.4.542
- Esteves, P. T., de Oliveira, R. F., & Araújo, D. (2011). Posture-related affordances guide attacks in basketball. Psychology of Sport and Exercise, 12(6), 639–644. https://doi.org/10.1016/j.psychsport.2011.06.007
- Feigean, M., R'Kiouak, M., Seiler, R., & Bourbousson, J. (2018). Achieving teamwork in naturalistic sport settings: An exploratory qualitative study of informational resources supporting football players’ activity when coordinating with others. Psychology of Sport and Exercise, 38, 154–166. https://doi.org/10.1016/j.psychsport.2018.06.008
- Fine, J. M., & Amazeen, E. L. (2014). Stabilizing perceptual-motor asymmetries during social coordination. Human Movement Science, 34, 91–108. https://doi.org/10.1016/j.humov.2014.01.004
- Fogel, A., Garvey, A., Hsu, H.-C., & West-Stroming, D. (2006). Change processes in relationships: A relational-historical research approach. Cambridge University Press.
- Fogel, A. (2006). Dynamic systems research on interindividual communication: The transformation of meaning-making. Journal of Developmental Processes, 1(1), 7–30.
- Froese, T., Gould, C., & Seth, A. K. (2011). Validating and calibrating first-and second-person methods in the science of consciousness. Journal of Consciousness Studies, 18(2), 38.
- Froese, T., & Fuchs, T. (2012). The extended body: A case study in the neurophenomenology of social interaction. Phenomenology and the Cognitive Sciences, 11(2), 205–235. https://doi.org/10.1007/s11097-012-9254-2
- Froese, T., Gould, C., & Barrett, A. (2011). Re-viewing from within. A commentary on first- and second-person methods in the science of consciousness. Constructivist Foundations, 6(2), 254–269.
- Fusaroli, R., Rączaszek-Leonardi, J., & Tylén, K. (2014). Dialog as interpersonal synergy. New Ideas in Psychology, 32, 147–157. https://doi.org/10.1016/j.newideapsych.2013.03.005
- Gallagher, S. (2003). Phenomenology and experimental design toward a phenomenologically enlightened experimental science. Journal of Consciousness Studies, 10(9–10), 85–99.
- Gesbert, V., Durny, A., & Hauw, D. (2017). How do soccer players adjust their activity in team coordination? An enactive phenomenological analysis. Frontiers in Psychology, 8, 854. https://doi.org/10.3389/fpsyg.2017.00854
- Goldfield, E. C., Kay, B. A., & Warren, W. H. (1993). Infant bouncing: The assembly and tuning of action systems. Child Development, 64(4), 1128–1142.
- Goldfield, E. C. (1995). Emergent forms: Origins and early development of human action and perception. Oxford University Press.
- Harrison, S. J., & Richardson, M. J. (2009). Horsing around: Spontaneous four-legged coordination. Journal of Motor Behavior, 41(6), 519–524. https://doi.org/10.3200/35-08-014
- Harrison, S. J., & Stergiou, N. (2015). Complex adaptive behavior and dexterous action. Nonlinear Dynamics, Psychology, and Life Sciences, 19(4), 345–394.
- He, J., & Ravn, S. (2017). Sharing the dance – On the reciprocity of movement in the case of elite sports dancers. Phenomenology and the Cognitive Sciences. https://doi.org/10.1007/s11097-016-9496-5
- Himberg, T., Laroche, J., Bigé, R., Buchkowski, M., & Bachrach, A. (2018). Coordinated interpersonal behaviour in collective dance improvisation: The aesthetics of kinaesthetic togetherness. Behavioral Sciences, 8(2), 23. https://doi.org/10.3390/bs8020023
- Høffding, S., & Martiny, K. (2016). Framing a phenomenological interview: What, why and how. Phenomenology and the Cognitive Sciences, 15(4), 539–564. https://doi.org/10.1007/s11097-015-9433-z
- Hogan, N., & Sternad, D. (2012). Dynamic primitives of motor behavior. Biological Cybernetics, 106(11–12), 727–739. https://doi.org/10.1007/s00422-012-0527-1
- Holt, K. G., Saltzman, E., Ho, C.-L., Kubo, M., & Ulrich, B. D. (2006). Discovery of the pendulum and spring dynamics in the early stages of walking. Journal of Motor Behavior, 38(3), 206–218. https://doi.org/10.3200/JMBR.38.3.206-218
- Hristovski, R., Davids, K., & Araújo, D. (2006). Affordance-controlled bifurcations of action patterns in martial arts. Nonlinear Dynamics, Psychology, and Life Sciences, 10(4), 409–444.
- Hristovski, R., Davids, K., & Araújo, D. (2009). Information for regulating action in sport: Metastability and emergence of tactical solutions under ecological constraints. In D. Araújo, H. Ripoll, & M. Raab (Eds.), Perspectives on cognition and action in sport (pp. 43–57). Nova Science.
- Hristovski, R., Davids, K., Araujo, D., & Passos, P. (2011). Constraints-induced emergence of functional novelty in complex neurobiological systems: A basis for creativity in sport. Nonlinear Dynamics-Psychology and Life Sciences, 15(2), 175–206.
- Hutchins, E. (1995). Cognition in the wild. MIT Press.
- Huys, R., Kolodziej, A., Lagarde, J., Farrer, C., Darmana, R., & Zanone, P.-G. (2018). Individual and dyadic rope turning as a window into social coordination. Human Movement Science, 58, 55–68. https://doi.org/10.1016/j.humov.2017.12.015
- Kello, C. T., & Van Orden, G. C. (2009). Soft-assembly of sensorimotor function. Nonlinear Dynamics, Psychology, and Life Sciences, 13(1), 57–78.
- Kelso, J. A. S. (2009). Coordination dynamics. In R. A. Meyers (Ed.), Encyclopedia of complexity and systems sciences (pp. 1537–1567). Springer.
- Kermarrec, G., & Bossard, C. (2014). Defensive soccer players’ decision making: A naturalistic study. Journal of Cognitive Engineering and Decision Making, 8(2), 187–199. https://doi.org/10.1177/1555343414527968
- Kimmel, M. (2016). Embodied “micro-“skills in tango improvisation – How a collaborative behavioral arc comes about. In F. Engel & S. Marienberg (Eds.), Out for a walk. Das Entgegenkommende Denken (pp. 57–74). DeGruyter.
- Kimmel, M. (2019). A cognitive theory of joint improvisation: The case of Tango Argentino. In V. L. Midgelow (Ed.), The Oxford Handbook of Improvisation in Dance (pp. 562–592). Oxford University Press. https://doi.org/10.1093/oxfordhb/9780199396986.013.32
- Kimmel, M., & Hristova, D. (accepted). The micro-genesis of improvisational co-creation. Creativity Research Journal.
- Kimmel, M., Hristova, D., & Kussmaul, K. (2018). Sources of embodied creativity: Interactivity and ideation in contact improvisation. Behavioral Sciences, 8(6), 52. https://doi.org/10.3390/bs8060052
- Kimmel, M., & Irran, C. (2021). Decision-making in Shiatsu bodywork: Complementariness of embodied coupling and conceptual inference. Phenomenology and the Cognitive Sciences. https://doi.org/10.1007/s11097-020-09718-7
- Kimmel, M., Irran, C., & Luger, M. (2015). Bodywork as systemic and inter-enactive competence: Participatory process management in Feldenkrais Method® & Zen Shiatsu. Frontiers in Psychology, 5, 1424. https://doi.org/10.3389/fpsyg.2014.01424
- Kimmel, M., & Preuschl, E. (2015). Dynamic coordination patterns in tango argentino: A cross-fertilization of subjective explication methods and motion capture. In J.-P. Lachaud & N. Abe (Eds.), Dance notations and robot motion (pp. 209–236). Springer.
- Kimmel, M., & Rogler, C. (2018). Affordances in interaction – The case of Aikido. Ecological Psychology, 30(3), 195–223. https://doi.org/10.1080/10407413.2017.1409589
- Kimmel, M., & Rogler, C. (2019). The anatomy of antagonistic coregulation: Emergent coordination, path dependency, and the interplay of biomechanic parameters in Aikido. Human Movement Science, 63, 231–253. https://doi.org/10.1016/j.humov.2018.08.008
- Kimmel, M., & Schneider, S. (forthcoming). Intercorporeal synergy practices – Perspectives from expert interaction. In J. Sutton & K. Bicknell (Eds.), Collaborative embodied performance. Bloomsbury.
- Klein, G. (2008). Naturalistic decision making. Human Factors, 50(3), 456–460. https://doi.org/10.1518/001872008X288385
- Klein, G. (2003). The power of intuition. Doubleday.
- Knoblich, G., Butterfill, S., & Sebanz, N. (2011). Psychological research on joint action. In B. Ross (Ed.), Psychology of learning and motivation (Vol. 54, pp. 59–101). Academic Press. http://linkinghub.elsevier.com/retrieve/pii/B9780123855275000036
- Krabben, K., Orth, D., & van der Kamp, J. (2019). Combat as an interpersonal synergy: An ecological dynamics approach to combat sports. Sports Medicine, 49(12), 1825–1836. https://doi.org/10.1007/s40279-019-01173-y
- Kugler, P. N., & Turvey, M. T. (1987). Information, natural law, and the self-assembly of rhythmic movement. Erlbaum.
- Lanini, J., Duburcq, A., Razavi, H., Le Goff, C. G., & Ijspeert, A. J. (2017). Interactive locomotion: Investigation and modeling of physically-paired humans while walking. PLOS One, 12(9), e0179989. https://doi.org/10.1371/journal.pone.0179989
- Latash, M. L. (2008). Synergy. Oxford UP.
- Latash, M. L. (2010). Stages in learning motor synergies: A view based on the equilibrium-point hypothesis. Human Movement Science, 29(5), 642–654. https://doi.org/10.1016/j.humov.2009.11.002
- Latash, M. L. (2012). Movements that are both variable and optimal. Journal of Human Kinetics, 34(1), 5–13. https://doi.org/10.2478/v10078-012-0058-9
- Latash, M. L. (2019). Human movements: Synergies, stability, and agility. In G. Venture, J.-P. Laumond, & B. Watier (Eds.), Biomechanics of Anthropomorphic Systems (Vol. 124, pp. 135–154). Springer International Publishing. https://doi.org/10.1007/978-3-319-93870-7_7
- Latash, M. L., Scholz, J. P., & Schöner, G. (2007). Toward a new theory of motor synergies. Motor Control, 11(3), 276–308. https://doi.org/10.1123/mcj.11.3.276
- Latash, M. L., Gorniak, S., & Zatsiorsky, V. M. (2008). Hierarchies of synergies in human movements. Kinesiology (Zagreb, Croatia), 40(1), 29.
- Latash, M. L., & Zatsiorsky, V. M. (2016). Biomechanics and motor control. Defining central concepts. Elsevier.
- Lavelli, M., Pantoja, A. P. F., Hui-Chin, H., Messinger, D., & Fogel, A. (2006). Using microgenetic designs to study change processes. In G. Adams & M. Berzonsky (Eds.), Blackwell handbook of adolescence. Blackwell Publishing.
- Legrand, D., & Ravn, S. (2009). Perceiving subjectivity in bodily movement: The case of dancers. Phenomenology and the Cognitive Sciences, 8(3), 389–408. https://doi.org/10.1007/s11097-009-9135-5
- Łucznik, K., & Loesche, F. (2017). Dance improvisational cognition. AVANT. The Journal of the Philosophical-Interdisciplinary Vanguard, VIII(Special), 227–239. https://doi.org/10.26913/80s02017.0111.0021
- Lyle, J. (2003). Stimulated recall: A report on its use in naturalistic research. British Educational Research Journal, 29(6), 861–878. https://doi.org/10.1080/0141192032000137349
- Macquet, A. C. (2009). Recognition within the decision-making process: A case study of expert volleyball players. Journal of Applied Sport Psychology, 21(1), 64–79. https://doi.org/10.1080/10413200802575759
- Macquet, A. C., & Fleurance, P. (2007). Naturalistic decision-making in expert badminton players. Ergonomics, 50(9), 1433–1450. https://doi.org/10.1080/00140130701393452
- Macquet, A.-C., & Kragba, K. (2015). What makes basketball players continue with the planned play or change it? A case study of the relationships between sense-making and decision-making. Cognition, Technology & Work, 17(3), 345–353. https://doi.org/10.1007/s10111-015-0332-4
- Marsh, K. L. (2015). Social ecological context of conversing. Ecological Psychology, 27(4), 310–334. https://doi.org/10.1080/10407413.2015.1086229
- Marsh, K. L., Johnston, L., Richardson, M. J., & Schmidt, R. C. (2009). Toward a radically embodied, embedded social psychology. European Journal of Social Psychology, 39(7), 1217–1225. https://doi.org/10.1002/ejsp.666
- Marsh, K. L., Richardson, M. J., Baron, R. M., & Schmidt, R. C. (2006). Contrasting approaches to perceiving and acting with others. Ecological Psychology, 18(1), 1–38. https://doi.org/10.1207/s15326969eco1801_1
- Marsh, K. L., Richardson, M. J., & Schmidt, R. C. (2009). Social connection through joint action and interpersonal coordination. Topics in Cognitive Science, 1(2), 320–339. https://doi.org/10.1111/j.1756-8765.2009.01022.x
- Merleau-Ponty, M. (1968). The visible and the invisible. Northwestern University Press.
- Nomikou, I., Leonardi, G., Rohlfing, K. J., & Rączaszek-Leonardi, J. (2016). Constructing Interaction: The development of gaze dynamics: Development of gaze dynamics in interaction. Infant and Child Development, 25(3), 277–295. https://doi.org/10.1002/icd.1975
- Nowak, A., Vallacher, R. R., Zochowski, M., & Rychwalska, A. (2017). Functional synchronization: The emergence of coordinated activity in human systems. Frontiers in Psychology, 8, 945. https://doi.org/10.3389/fpsyg.2017.00945
- Nyberg, G. (2015). Developing a ‘somatic velocimeter’ – The practical knowledge of freeskiers. Qualitative Research in Sport, Exercise and Health, 7(1), 109–124. https://doi.org/10.1080/2159676X.2013.857709
- O’Brien, J. (1993). Action research through stimulated recall. Research in Science Education, 23(1), 214–221. https://doi.org/10.1007/BF02357063
- Oullier, O., & Kelso, S. J. A. (2009). Social coordination from the perspective of coordination dynamics. R.A. Meyers. Encyclopedia of Complexity and Systems Sciences, 8198–8212.
- Pacherie, E. (2006). Toward a dynamic theory of intentions. In S. Pockett, W. P. Banks, & S. Gallagher (Eds.), Does consciousness cause behavior (pp. 145–167). MIT Press.
- Passos, P., Milho, J., & Button, C. (2018). Quantifying synergies in two-versus-one situations in team sports: An example from Rugby Union. Behavior Research Methods, 50(2), 620–629. https://doi.org/10.3758/s13428-017-0889-3
- Passos, P., Araújo, D., Davids, K., Gouveia, L., Milho, J., & Serpa, S. (2008). Information-governing dynamics of attacker-defender interactions in youth rugby union. Journal of Sports Sciences, 26(13), 1421–1429. https://doi.org/10.1080/02640410802208986
- Passos, P., Milho, J., Fonseca, S., Borges, J., Araújo, D., & Davids, K. (2011). Interpersonal distance regulates functional grouping tendencies of agents in team sports. Journal of Motor Behavior, 43(2), 155–163. https://doi.org/10.1080/00222895.2011.552078
- Petitmengin, C. (2006). Describing one’s subjective experience in the second person, an interview method for the science of consciousness. Phenomenology and the Cognitive Sciences, 5(3–4), 229–269. https://doi.org/10.1007/s11097-006-9022-2
- Pfeifer, R., & Bongard, J. (2007). How the body shapes the way we think: A new view of intelligence. MIT Press.
- Pinder, R. A., Davids, K., & Renshaw, I. (2012). Metastability and emergent performance of dynamic interceptive actions. Journal of Science and Medicine in Sport, 15(5), 437–443. https://doi.org/10.1016/j.jsams.2012.01.002
- Raja, V. (2018). A theory of resonance: Towards an ecological cognitive architecture. Minds and Machines, 28(1), 29–51. https://doi.org/10.1007/s11023-017-9431-8
- Ravn, S., & Hansen, H. P. (2013). How to explore dancers’ sense experiences? A study of how multi-sited fieldwork and phenomenology can be combined. Qualitative Research in Sport, Exercise and Health, 5(2), 196–213. https://doi.org/10.1080/2159676X.2012.712991
- Reed, K., Peshkin, M., Hartmann, M. J., Grabowecky, M., Patton, J., & Vishton, P. M. (2006). Haptically Linked dyads: are two motor-control systems better than one? Psychological Science, 17(5), 365–366. https://doi.org/10.1111/j.1467-9280.2006.01712.x
- Renshaw, I., Shuttleworth, R., & Chow, J. Y. (2009). Insights from ecological psychology and dynamical systems. Theory can underpin a philosophy.of coaching. International Journal of Sport Psychology, 40, 580–602.
- Reynolds, R. F., & Osler, C. J. (2014). Mechanisms of interpersonal sway synchrony and stability. Journal of the Royal Society, Interface, 11(101), 20140751. https://doi.org/10.1098/rsif.2014.0751
- Reynolds, R., & Salas, E. (2015). Integrating sports psychology into a human factors framework. International Journal of Sport Psychology, 47, 224–238.
- Richardson, M. J., Marsh, K. L., Isenhower, R. W., Goodman, J. R. L., & Schmidt, R. C. (2007). Rocking together: Dynamics of intentional and unintentional interpersonal coordination. Human Movement Science, 26(6), 867–891. https://doi.org/10.1016/j.humov.2007.07.002
- Rietveld, E., & Kiverstein, J. (2014). A rich landscape of affordances. Ecological Psychology, 26(4), 325–352. https://doi.org/10.1080/10407413.2014.958035
- Riley, M. A., Richardson, M. J., Shockley, K., & Ramenzoni, V. C. (2011). Interpersonal synergies. Frontiers in Psychology, 2, 38. https://doi.org/10.3389/fpsyg.2011.00038
- R'Kiouak, M., Saury, J., Durand, M., & Bourbousson, J. (2018). Joint action in an elite rowing pair crew after intensive team training: The reinforcement of extra-personal processes. Human Movement Science, 57, 303–313. https://doi.org/10.1016/j.humov.2017.09.008
- Rochat, N., Gesbert, V., Seifert, L., & Hauw, D. (2018). Enacting phenomenological gestalts in ultra-trail running: An inductive analysis of trail runners' courses of experience. Frontiers in Psychology, 9, 2038. https://doi.org/10.3389/fpsyg.2018.02038
- Ryan, K. J., & Gallagher, S. (2020). Between ecological psychology and enactivism: Is there resonance? Frontiers in Psychology, 11, 1147. https://doi.org/10.3389/fpsyg.2020.01147
- Saltzman, E. L., & Munhall, K. G. (1992). Skill acquisition and development: The roles of state-, parameter, and graph dynamics. Journal of Motor Behavior, 24(1), 49–57. https://doi.org/10.1080/00222895.1992.9941600
- Sawers, A., Bhattacharjee, T., McKay, J. L., Hackney, M. E., Kemp, C. C., & Ting, L. H. (2017). Small forces that differ with prior motor experience can communicate movement goals during human-human physical interaction. Journal of Neuroengineering and Rehabilitation, 14(1), 8.https://doi.org/10.1186/s12984-017-0217-2
- Sawyer, K. (2003). Group creativity. Music, theater, collaboration. Erlbaum.
- Sawyer, K., & DeZutter, S. (2009). Distributed creativity: How collective creations emerge from collaboration. Psychology of Aesthetics, Creativity, and the Arts, 3(2), 81–92. https://doi.org/10.1037/a0013282
- Schiavio, A., & Kimmel, M. (2021). The ecological dynamics of musical creativity and skill acquisition. In A. Scarinzi (Ed.), Meaningful Relations: The Enactivist Making of Experiential Worlds (pp. 119–153). Academia Verlag.
- Schmidt, R. C., Carello, C., & Turvey, M. (1990). Phase transitions and critical fluctuations in the visual coordination of rhythmic movements between people. Journal of Experimental Psychology: Human Perception and Performance, 16(2), 227–247.
- Schmidt, R. C., Fitzpatrick, P., Caron, R., & Mergeche, J. (2011). Understanding social motor coordination. Human Movement Science, 30(5), 834–845. https://doi.org/10.1016/j.humov.2010.05.014
- Schmidt, R., & Fitzpatrick, P. (2016). The origin of the ideas of interpersonal synchrony and synergies. In P. Passos, K. Davids, & J. Y. Chow (Eds.), Interpersonal coordination and performance in social systems (pp. 17–31). Routledge.
- Scholz, J. P., & Schöner, G. (1999). The uncontrolled manifold concept: Identifying control variables for a functional task. Experimental Brain Research, 126(3), 289–306. https://doi.org/10.1007/s002210050738
- Searle, J. (1990). Collective intentions and actions. In P. Cohen, J. Morgan, & M. E. Pollack (Eds.), Intentions in communication. (pp. 401–415). Bradford Books, MIT Press.
- Sebanz, N., & Knoblich, G. (2009). Prediction in joint action: What, when, and where. Topics in Cognitive Science, 1(2), 353–367. https://doi.org/10.1111/j.1756-8765.2009.01024.x
- Seifert, L., & Davids, K. (2017). Ecological dynamics: A theoretical framework for understanding sport performance, physical education and physical activity. In P. Bourgine, P. Collet, & P. Parrend (Eds.), First Complex Systems Digital Campus World E-Conference 2015. (pp. 29–40). Springer International Publishing. https://doi.org/10.1007/978-3-319-45901-1_3
- Silva, P. L., Fonseca, S. T., & Turvey, M. T. (2010). Is tensegrity the functional architecture of the equilibrium point hypothesis. Motor Control, 14(3), e35–e40. https://doi.org/10.1123/mcj.14.3.e35
- Sinnott, C., Kelly, M. A., & Bradley, C. P. (2017). A scoping review of the potential for chart stimulated recall as a clinical research method. BMC Health Services Research, 17(1). https://doi.org/10.1186/s12913-017-2539-y
- Slomka, K., Juras, G., Sobota, G., Furmanek, M., Rzepko, M., & Latash, M. L. (2015). Intra-personal and inter-personal kinetic synergies during jumping. Journal of Human Kinetics, 49(1), 75–88. https://doi.org/10.1515/hukin-2015-0110
- Sofianidis, G., Elliott, M. T., Wing, A. M., & Hatzitaki, V. (2015). Interaction between interpersonal and postural coordination during frequency scaled rhythmic sway: The role of dance expertise. Gait & Posture, 41(1), 209–216. https://doi.org/10.1016/j.gaitpost.2014.10.007
- Solnik, S., Reschechtko, S., Wu, Y.-H., Zatsiorsky, V. M., & Latash, M. L. (2015). Force-stabilizing synergies in motor tasks involving two actors. Experimental Brain Research, 233(10), 2935–2949. https://doi.org/10.1007/s00221-015-4364-z
- Solnik, S., Reschechtko, S., Wu, Y.-H., Zatsiorsky, V. M., & Latash, M. L. (2016). Interpersonal synergies: Static prehension tasks performed by two actors. Experimental Brain Research, 234(8), 2267–2282. https://doi.org/10.1007/s00221-016-4632-6
- Steffensen, S. V. (2013). Human interactivity: Problem-solving, solution-probing and verbal patterns in the wild. In S. J, Cowley., & F. Vallée-Tourangeau (Eds.), Cognition beyond the brain (pp. 195–221). Springer London. http://link.springer.com/10.1007/978-1-4471-5125-8_11
- Steiner, S., Macquet, A.-C., & Seiler, R. (2017). An integrative perspective on interpersonal coordination in interactive team sports. Frontiers in Psychology, 8, 1440. https://doi.org/10.3389/fpsyg.2017.01440
- Stern, D. N. (2004). The present moment in psychotherapy and everyday life. WW Norton & Company.
- Sudnow, D. (1978). Ways of the hand: The organization of improvised conduct. Harvard University Press.
- Sylos-Labini, F., d'Avella, A., Lacquaniti, F., & Ivanenko, Y. (2018). Human-human interaction forces and interlimb coordination during side-by-side walking with hand contact. Frontiers in Physiology, 9, 179. https://doi.org/10.3389/fphys.2018.00179
- Torrents, C., Castañer, M., Dinušová, M., & Anguera, M. T. (2010). Discovering new ways of moving: Observational analysis of motor creativity while dancing contact improvisation and the influence of the partner. The Journal of Creative Behavior, 44(1), 53–69. https://doi.org/10.1002/j.2162-6057.2010.tb01325.x
- Torrents Martín, C., Ric, Á., & Hristovski, R. (2015). Creativity and emergence of specific dance movements using instructional constraints. Psychology of Aesthetics, Creativity, and the Arts, 9(1), 65–74. https://doi.org/10.1037/a0038706
- Torrents, C., Hristovski, R., Coterón, J., & Ric, A. (2016). Interpersonal coordination in Contact improvisation dance. In P. Passos, K. Davids, & J. Y. Chow (Eds.), Interpersonal coordination and performance in social systems (pp. 94–108). Routledge.
- Trasmundi, S. B., & Steffensen, S. V. (2016). Meaning emergence in the ecology of dialogical systems. Psychology of Language and Communication, 20(2), 154–181. https://doi.org/10.1515/plc-2016-0009
- Travassos, B., Araújo, D., Davids, K., Vilar, L., Esteves, P., & Vanda, C. (2012). Informational constraints shape emergent functional behaviours during performance of interceptive actions in team sports. Psychology of Sport and Exercise, 13(2), 216–223. https://doi.org/10.1016/j.psychsport.2011.11.009
- Turvey, M. T. (2007). Action and perception at the level of synergies. Human Movement Science, 26(4), 657–697. https://doi.org/10.1016/j.humov.2007.04.002
- Turvey, M. T., Shaw, R., & Mace, W. (1978). Issues in the theory of action. Degrees of freedom, coordinative structures and coalitions. In J. Requin (Ed.), Attention and performance VII (pp. 557–595). Lawrence Erlbaum Associates.
- Valenzuela-Moguillansky, C., & Vásquez-Rosati, A. (2019). An analysis procedure for the micro-phenomenological interview. Constructivist Foundations, 14(2), 123–166.
- van der Wel, R., Knoblich, G., & Sebanz, N. (2011). Let the force be with us: Dyads exploit haptic coupling for coordination. Journal of Experimental Psychology. Human Perception and Performance, 37(5), 1420–1431. https://doi.org/10.1037/a0022337
- Van Gelder, T. (1995). What might cognition be, if not computation? The Journal of Philosophy, 92(7), 345–381.
- Varela, F., & Shear, J. (1999). The View from Within: First-person Approaches to the Study of Consciousness (Consciousness Studies). Imprint AcademicVarela, F.J.
- Vermersch, P. (1994). L’Entretien d’ explicitation en formation continue et initiale. ESF.
- Vermersch, P. (1999). Introspection as practice. In F. Varela & J. Shear (Eds.), The View from Within. First person approaches to the study of consciousness. (pp. 17–42). Imprint Academic.
- von Holst, E. (1939). Entwurf eines Systems der lokomotorischen Periodenbildungen bei Fischen. Zeitschrift Für Vergleichende Physiologie, 26(4).
- Waddell, M. L., Fine, J. M., Likens, A. D., Amazeen, E. L., & Amazeen, P. G. (2016). Perceived heaviness in the context of Newton's Second Law: Combined effects of muscle activity and lifting kinematics. Journal of Experimental Psychology. Human Perception and Performance, 42(3), 363–374. https://doi.org/10.1037/xhp0000151
- Walton, A. E., Richardson, M. J., Langland-Hassan, P., & Chemero, A. (2015). Improvisation and the self-organization of multiple musical bodies. Frontiers in Psychology, 6, 313. https://doi.org/10.3389/fpsyg.2015.00313
- Warren, W. H. (2006). The dynamics of perception and action. Psychological Review, 113(2), 358–389. https://doi.org/10.1037/0033-295X.113.2.358
- Yamamoto, Y., Okumura, M., Yokoyama, K., & Kijima, A. (2016). Interpersonal coordination in competitive sports contests: Martial arts. In P. Passos, K. Davids, & J. Y. Chow (Eds.), Interpersonal coordination and performance in social systems (pp. 179–184). Routledge.