
ABSTRACT
The fourth industrial revolution and the rise of collaborative robots (cobots) in industrial assembly lines are changing the traditional role of human operators in assembly tasks from following a sequence of operations to working together with a cobot and being able to intervene at different stages of the assembly process. Hence, it is important to focus on cognitive flexibility training, instead of on procedural skill training. The current research examined the effect of performing several task segments simultaneously on cognitive flexibility training in an assembly task. We used a novel 3D simulation system to train participants in three between-participants groups. The three groups together – One Segment, Two Segments, and Nine Segments – comprised 29 participants. Following training, participants were required to assemble the model including having to switch between different sequences. The results demonstrate that the Nine Segments group required significantly longer training time compared to the One Segment group. For the Two Segments group, the switching time was shorter and the mean number of errors after switching was higher compared to the other groups. To conclude, only performing the task in two segments simultaneously improved both the cognitive flexibility and the subjective feeling of competence regarding participants’ cognitive flexibility.
1. Introduction
Traditionally, industrial assembly tasks have required operators to have procedural skills. Procedural skills can be defined as the ability to execute a sequence of actions designed to solve problems (Rittle-Johnson et al., Citation2001). To accomplish an industrial assembly task, the operator needs to follow an ordered sequence of steps or operations in a specific environment or situation (Ellis et al., Citation1996). As a result, traditionally, industrial assembly operator training required has focused on acquiring procedural skills in various areas. de Giorgio et al. (Citation2021) showed the use of video recordings demonstrating assembly steps to train inexperienced operators. Hochmitz and Yuviler-Gavish (Citation2011) compared procedural skill training for an assembly task using a virtual environment versus addressing them mentally. Simultaneous presentation of the information about the steps through coaching and a virtual model was suggested by Claessens et al. (Citation2000). Irrazabal et al. (Citation2016) investigated the differences between teaching operators the assembly steps using text, images, or multimedia.
It seems that with the fourth industrial revolution and the rise in the use of collaborative robots (cobots) in industrial assembly lines, the operator’s tasks have changed. The fourth industrial revolution (also called “Industry 4.0”) is a term coined by Klaus Schwab, founder and executive chairman of the World Economic Forum, to describe a world where individuals use connected and embedded technology to enable and manage their lives (Davis, Citation2016; Kravchenko & Kyzymenko, Citation2019; Schwab, Citation2017; Xu et al., Citation2018). Cobots are part of the fourth industrial revolution. They are robots that are intended to cooperate and work in symbiosis with humans, in contrast to regular robots that replace the human operator and operate in designated cells (Villani et al., Citation2018; Vysocky & Novak, Citation2016). Cobots are used extensively in industrial assembly tasks, because they are a good solution when total automation is not applicable, for example, when product volume is moderate, product variant is high, and the workplace is too small to hold a robot cell (Cohen & Shoval, Citation2020; De Winter et al., Citation2019; El Makrini et al., Citation2018; Fast-Berglund et al., Citation2016; Kinast et al., Citation2021; Rossi et al., Citation2020; Salunkhe et al., Citation2019; Shchenikov et al., Citation2021).
The human operator performing industrial assembly tasks together with the cobot should be able to intervene at different stages of the assembly process, monitor the cobot, complete its work or replace it. Hence, instead of traditional procedural skills, which are part of cognitive persistence skills – the ability to maintain stable goals and eliminating competing goals (Dreisbach & Goschke, Citation2004; Goschke, Citation2003; Hommel, Citation2015) – today’s operators must acquire cognitive flexibility skills. Cognitive flexibility is the human ability to adapt cognitive processing strategies to face new and unexpected conditions in the environment (Cañas et al., Citation2003). Several studies have explored how cognitive flexibility changes with age (Cragg & Chevalier, Citation2012), the effect of cocaine usage on cognitive flexibility (Colzato et al., Citation2009), the relations between cognitive flexibility and religious belief (Zmigrod et al., Citation2019), the differences between experts and novices regarding cognitive flexibility (Anzai & Yokoyama, Citation1984; Frensch & Sternberg, Citation1989), and more.
Having cognitive flexibility is expressed through three main ways. First, through efficient shifting between tasks and matching the required response to the changing situation. A switch cost reflects the decrease in performance when the shift is performed (Cragg & Chevalier, Citation2012). Second, cognitive flexibility is expressed by being sensitive to alternative possibilities and discarding ineffective goals, for example: alternating between categories when it is no longer rewarding to persist with the previously rewarding category (Zmigrod et al., Citation2019). Third, cognitive flexibility can be expressed by changing complex behaviors instead of merely changing discrete responses (Canas et al., Citation2006), when a strategy in this context is defined as a sequence of operations that search through the problem space (Payne et al., Citation1993).
Past studies have demonstrated that cognitive flexibility can be acquired with experience (Canas et al., Citation2006), and therefore training methods to improve it could be suggested. The current research explores a new method to train the cognitive flexibility needed from a human operator performing industrial assembly tasks together with a cobot. Hence, the research focuses on the question of whether it is possible to acquire this cognitive flexibility through training requiring participants to perform several task segments simultaneously. Segmentation of a task was suggested by Mayer and Moreno (Citation2003) as one of the nine principles to foster meaningful learning when using multimedia. According to their definition, meaningful learning denotes “deep understanding of the material”, “mentally organizing it into a coherent cognitive structure”, and “the construction of a mental model of how a casual system works” (Mayer & Moreno, Citation2003, p. 43). Their theory of multimedia learning is based on three assumptions. One of them, in line with Wittrock’s (Citation1989) generative-learning theory and Mayer’s (Citation1999, Citation2002) selection-organization-integrating theory of active learning, is that to achieve meaningful learning, a substantial amount of cognitive processing should take place, including paying attention to the material and organizing it into a coherent structure.
In the current research, task segmentation and training to perform several task segments simultaneously was intended to mobilize the active processing needed to acquire cognitive flexibility in an assembly task. The cognitive flexibility will signal to the human operators working with a cobot whether it is time to step in, keep on simply monitoring the cobot or altogether replace the cobot and takeover the task, during different stages of the assembly task. This model is in sharp contrast to previous studies.
In the past, segmentation in multimedia learning focused on reducing the cognitive load by allowing learners to autonomously monitor their learning process and progress from one segment to another only when they finish the acquisition, and not continuously (Mayer & Moreno, Citation2003). Several examples for using segmentation to reduce cognitive load can be found in the literature. Mayer and Chandler (Citation2001) demonstrated that breaking a narrated animation explaining lightning formation into 16 segments and allowing the learners to pace their progress improved performance in problem-solving transfer tests. Similarly, for the case of a 20-minute tutorial addressing how an electric motor works, Mayer et al. (Citation2003) reported better transfer in the segmented condition. Other studies showed that segmented videos improved recall and transfer and reduced the subjective level of cognitive load (Hasler et al., Citation2007; Spanjers et al., Citation2010). Moreno (Citation2007) found that transfer of concepts was improved when a video was segmented. Interestingly, segmentation helped learners with low working memory capacity to compare their recall scores to those of learners with high working memory capacity (Lusk et al., Citation2009). Doolittle et al. (Citation2015) showed that the higher the number of segments, the better the recall and application.
As demonstrated, the use of segmentation for training to perform several segments simultaneously, instead of for pacing the learning, was not addressed in previous research. We hypothesize that assembly task training by segmenting the task and performing several task segments simultaneously will improve the operator’s cognitive flexibility when executing the assembly task afterwards in the real world, probably at the cost of increased training time. We test our hypothesis by using a novel browser-based 3D application called BLOCK6, specifically developed for this study using Amazon Sumerian software, which simulates a brick assembly task. Participants were divided into three between-participants groups, which were trained in the assembly task in one, two or nine segments simultaneously. Participants’ cognitive flexibility in the assembly task after the training phase (the transfer phase) was measured by the shift cost (Cragg & Chevalier, Citation2012) – their ease of switching between different randomly selected sequences of the assembly task, indicating the required operator’s ability to quickly and accurately step in at different stages of the task when working with a cobot.
2. Materials and method
2.1 Design
Participants were 87 students from ORT Braude College of Engineering, Israel (hereafter: ORT Braude College) who were randomly assigned to one of three between-participants groups: the One Segment group, whose members were trained in one segment; the Two Segments group, whose members were trained in two segments simultaneously; and the Nine Segments group, whose members were trained in nine segments simultaneously. Although the assignment to a group was random, an attempt was made to keep the percentage of males equal among the groups.
2.2 Participants
Participants were recruited from among the from ORT Braude College student body. In total, 87 students (42 males, 45 females) joined the study, of which 29 (13 males, 19 females) were randomly assigned to the One Segment group, 29 (15 males, 14 females) were randomly assigned to the Two Segments group, and 29 (14 males, 15 females) to the Nine Segments group. Participants’ average age was 24.9, with a range of 20–31. All participants had normal or corrected-to-normal visual acuity with no color blindness. 12.6% of the participants (6.9% in the One Segment group, 13.8% in the Two Segments group, and 17.2% in the Nine Segments group) had some prior experience with industrial assembly lines.
2.3 Instruments
Amazon Sumerian software was used to develop a novel simulation of a brick assembly task in a browser-based 3D application called BLOCK6. The application displays the complex model of a truck in three dimensions and allows the users to see the model from all directions and manipulate it from their own computer and browser using a mouse. The aim was for the participants to assemble the truck or part thereof. demonstrates the assembled model.
Figure 1. The assembled model.
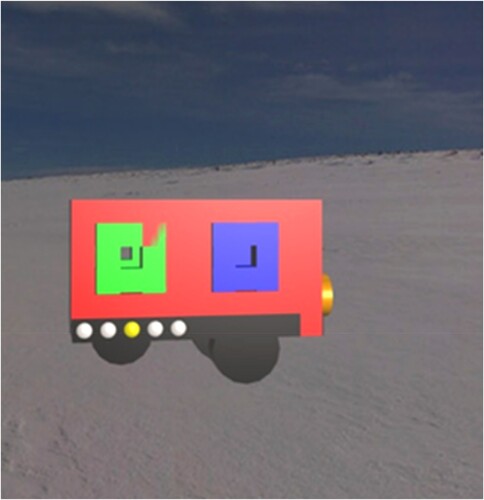
There were five types of parts. The white dots are the possible connection points in each part, and after selecting the desired connection point, it turns yellow, whether or not it is the right or wrong connection point. The selected part can be rotated on all possible axes. The rotary buttons are on the top left of . Operators choose one of five available colors – blue, red, green, orange, and black – for the selected part. The color buttons are also on the top left of , below the rotary buttons. Parts are connected by pressing the connection button, and canceling the last connection is done by clicking the cancel connection button. The assembly surface can be rotated using the buttons on the right side of the screen () in the Up, Back, Left, Front, Right, and Down directions.
Figure 2. The screen layout.
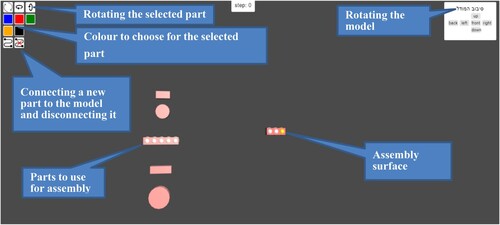
depicts the screen layout.
Two measures were evaluated in the training phase: the training time and the number of errors that were made during training. For the transfer phase, the shift cost (Cragg & Chevalier, Citation2012) – ease of switching – was evaluated by additional two measures: the switching time between the different sequences (i.e. the time from completing a sequence, e.g. steps #45–55, to starting the next sequence, e.g. steps #5–16), and the mean number of errors that were made in the first step in each sequence after switching to it (i.e. steps #5, 61, and 24).
2.4 Experimental task
The task comprised two phases: training and transfer. In each phase participants were required to complete the assembly steps according to the instructions without errors (they could not move on if they had made a mistake in the assembly) and as fast as possible.
Parts are assembled by connecting a new part to an existing part in the model. When handling the new part, operators select its connection point, color, and the desired direction they want the part to face in the model. The operators then have to select the desired connection point on the model. To connect the part to the existing model, the operator presses the connection button. The parts are then merged at the selected connection points. If the color or the connection point are not defined, then the system will notify the participant that they have to choose a color or connection point. If there is an error in the selected part, color, direction of the part or connection point, the system will notify the operator that a mistake had been made and the assembly should be canceled and corrected. The entire model is composed of 71 parts.
After enrollment in the experiment and assignment to a group, participants received a Word file (via email) containing an explanation about the system and the description of each assembly step as well as a picture demonstrating each step.
The training phase differed for the three groups. The One Segment group was directed to complete steps #1 through step #71, in that order. The Two Segments group were shown two segments. The first segment included steps #1–35, and the second one included steps #36–71. Participants in this group performed four steps from the first segment (#1–4), and then were moved to the second segment where they had to perform four steps (#36–39), after which they returned to the first segment and performed the next four steps (#5–8), and so on until they completed the 35 steps in the first segment and the 36 steps in the second segment. The Nine Segments group were shown nine segments, which included steps #1–7, 8–15, 16–23, 24–31, 32–39, 40–47, 48–55, 56–63, and 64–71. They performed four steps in one segment, then were moved to another segment to perform four steps in it, in a randomized order, and so on until they completed all the steps.
In the transfer phase, which evaluated the ability to switch between randomized sequences, all three groups performed steps #45–55, 5–16, 61–71, and 24–34, in that order.
2.5 Procedure
This research complied with the American Psychological Association Code of Ethics and was approved by the Institutional Review Board at ORT Braude College. Informed consent was obtained from each participant.
Participants enrolled for the study by an e-mail ad sent to all ORT Braude College students. First, they chose a date that suited them from a list of offered dates. They were then sent an e-mail notifying them of the date of the experiment to which they had registered and that also included a Zoom link to which they had to connect to participate in the experiment. The experiment was performed via the Zoom app (because of COVID19 restrictions the experiment could not take place on campus in a lab) through which a video meeting between the experimenter and the participants was held. The second email also contained a description of the equipment they would need during the experiment (a computer and mouse). The email gave them their research group name and an identification number, and included a personal information form (gender, age, and existence of prior experience with industrial assembly lines) and an informed consent form (to be filled out and returned by e-mail to the experimenter). The email also contained a link to two informational videos (participants were asked to watch the two informational videos about the experimental system in order to facilitate the use of the system), a WORD file containing the instructions for operating the system and instructions for the assembly steps, and a link to the experimental system. In each session, up to six participants performed the experiment simultaneously. Each session lasted about one hour.
At the beginning of the experiment, and after it had been verified that the participants had filled out the forms and watched the two instructional videos, the experimenter read the experiment instructions (which they had already received) out loud to the participants. The instructions simultaneously appeared on screen so that all participants in the specific session could see the instructions as the experimenter read them.
While the experimenter was reading the instructions, participants were asked to click on the link to the software sent to them, and type in on the system’s opening screen the group name and identification number they had previously received. After the software opened properly, the experimenter continued reading the instructions. When the experimenter finished reading the instructions, participants shared their computer screen so that the experimenter could watch them during the experiment. They then performed the training phase and the transfer phase, respectively, at their own pace. The experimenter remained in the Zoom meeting throughout the session to help with any technical problems. At the end of the session, participants were thanked and paid 80 NIS (about 26 USD) for their participation.
3. Results
Four ANOVAs were performed, one for each measure, with the group (One Segment, Two Segments, and Nine Segments) as the between-participants independent variable.
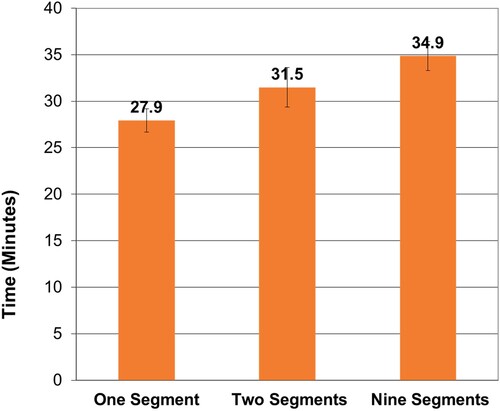
The training time significantly differed between the groups (F(2, 87) = 4.25, p = 0.018). An LSD (least significant difference) post hoc test pointed to longer training times for the Nine Segments group (M = 34.9 min, SD = 8.4) compared to the One Segment group (M = 27.9 min, SD = 6.8; p = 0.005). Neither the difference between the training time of the Nine Segments group and the Two Segments group (M = 31.5 min, SD = 11.4) (p = 0.16) nor the difference between the training time of the Two Segments and the One Segment groups (p = 0.14) were significant. These results are presented in .
Figure 3. Mean training time for each group (with standard error bars).
The mean number of errors that were made during training was not significantly different between the groups (One Segment group: M = 13.0, SD = 8.7; Two Segments group: M = 17.2, SD = 11.4; Nine Segments group: M = 13.6, SD = 7.3; F(2, 87) = 1.76, p = 0.18). An LSD post hoc test also did not indicate any significant differences between the groups (One Segment group and Two Segments group: p = 0.08; One Segment group and Nine Segments group: p = 0.80; Two Segments group and Nine Segments group: p = 0.14).
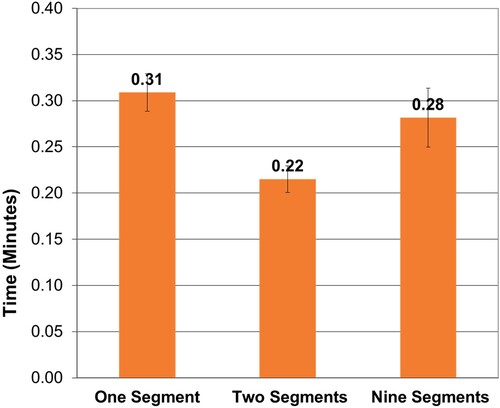
The mean switching time between sequences in the transfer phase was significantly different between the groups (F(2, 87) = 4.25, p = 0.018). An LSD post hoc test pointed to a significantly shorter switching time for the Two Segments group (M = 0.22 min, SD = 0.08) compared to both the One Segment group (M = 0.31 min, SD = 0.11; p = 0.006) and the Nine Segments group (M = 0.28 min, SD = 0.17; p = 0.048). The difference between the mean switching time of the One Segment and the Nine Segments groups was not significant (p = 0.42). These results are presented in .
Figure 4. Mean switching time in the transfer phase for each group (with standard error bars).
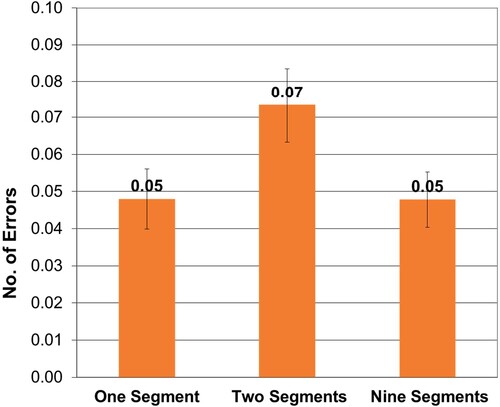
In the transfer phase also, the mean number of errors that were made in the first step of a sequence after switching to it was not significantly different between the groups (F(2, 87) = 2.91, p = 0.06). Nevertheless, an LSD post hoc test indicated a significantly higher mean number of errors for the Two Segments group (M = 0.07, SD = 0.05) compared to both the One Segment group (M = 0.05, SD = 0.04; p = 0.04) and the Nine Segments group (M = 0.05, SD = 0.04; p = 0.04). The difference between the mean number of errors of the One Segment and the Nine Segments groups was not significant (p = 0.99). These results are presented in .
Figure 5. Mean number of errors that were made in the first step of a sequence after switching to it (in the transfer phase, with standard error bars).
4. Discussion
The fourth industrial revolution (Davis, Citation2016; Kravchenko & Kyzymenko, Citation2019; Schwab, Citation2017; Xu et al., Citation2018) and the rise of cobots in industrial assembly lines (Cohen & Shoval, Citation2020; De Winter et al., Citation2019; El Makrini et al., Citation2018; Fast-Berglund et al., Citation2016; Kinast et al., Citation2021; Rossi et al., Citation2020; Salunkhe et al., Citation2019; Shchenikov et al., Citation2021; Villani et al., Citation2018; Vysocky & Novak, Citation2016) have changed the traditional role of the human operator in assembly tasks from following a sequence of operations to working together with a cobot and being able to intervene at different stages of the assembly process. Hence, in the operator training process, it is important to focus on cognitive flexibility training (Canas et al., Citation2006; Cañas et al., Citation2003; Cragg & Chevalier, Citation2012; Zmigrod et al., Citation2019), instead of on procedural skill training (Claessens et al., Citation2000; Ellis et al., Citation1996; de Giorgio et al., Citation2021; Hochmitz & Yuviler-Gavish, Citation2011; Irrazabal et al., Citation2016; Rittle-Johnson et al., Citation2001).
The current research examined the effect of segmenting an assembly task and performing several segments simultaneously on cognitive flexibility training in this task. Although task segmentation was suggested by Mayer and Moreno (Citation2003) as one of the nine principles to foster meaningful learning using multimedia, and was shown to be beneficial in previous research (Doolittle et al., Citation2015; Hasler et al., Citation2007; Lusk et al., Citation2009; Mayer et al., Citation2003; Mayer & Chandler, Citation2001; Moreno, Citation2007; Spanjers et al., Citation2010), the use of segmentation for training to perform several segments simultaneously and acquire cognitive flexibility, instead of the original purpose of pacing the learning, was not previously addressed.
Our assumption was that assembly task training wherein the trainee performs the task simultaneously in several segments will necessarily increase the training time yet will also improve the trainee’s cognitive flexibility. We used a novel computerized system called BLOCKS6 to train participants in three between-participants groups, with 29 participants in each group: a One Segment group, a Two Segments group, and a Nine Segments group. Following the training, participants were required to assemble the model by switching between different assembly sequences, and their cognitive flexibility was measured by the duration of the switching time between the sequences and the mean number of errors that were made in the first step in each sequence after switching to it.
The results demonstrated that only the Nine Segments group had a significantly longer training time compared to the One Segment group. This was not true for the Two Segments group vs. the One Segment group. The errors made during training were not affected by the number of segments in which participants trained. Hence, only the Nine segments group paid a price in terms of training time when performing the task in several segments simultaneously. This price, it appears, was not offset in enhanced cognitive flexibility, since we see that in the transfer phase, the Nine Segments group did not have an advantage over the One Segment group in either switching time or the number of errors made immediately after switching.
Interestingly, although the Two Segments group did not spend more time training compared to the One Segment group, its performance in the transfer phase was different. For the Two Segments group, the switching time was shorter compared to the other groups, and, in contrast, the mean number of errors after switching was higher compared to the other groups.
In light of our findings, the research question, whether segmenting the task and performing it in several segments simultaneously can improve cognitive flexibility, might be said to have a complex, not clear-cut, answer. Firstly, it depends on the number of segments being used. It appears that nine segments are too many to achieve this goal. Training with nine segments was tedious, as reflected in the training time, and long, and the resulting performance is no different from the performance achieved with regular training in one segment. It seems that participants were unable to keep the nine segments in their mind while training, could not remember what state a segment was in when they left it when they came back to this segment, and perceived the training phase as just randomly performing different steps without any logic. In terms of a mental model, which is the user’s understanding of how a particular system works, its internal structure, the related processes, etc. (Gentner & Stevens, Citation1983; Johnson-Laird, Citation1983; Norman, Citation1983), they could not develop a proper mental model that included several segments. Hence, it is not surprising that their cognitive flexibility in the transfer phase was no different from the cognitive flexibility of participants who trained in one segment.
The situation was very different for the Two Segments group. The two segments training was no longer than the One Segment training, but the resulting cognitive flexibility was better in terms of switching time. Training in two segments, however, also led to a higher number of errors right after switching. This can be explained by the overconfidence phenomenon: the excessive certainty regarding the accuracy of one’s belief or being too sure that you know the correct answer (Klayman et al., Citation1999; Koriat et al., Citation1980; Moore & Healy, Citation2008; Moore & Healy, Citation2008; Scheinkman & Xiong, Citation2003; Soll & Klayman, Citation2004). Hence, these two findings of shorter switching time and more errors after switching might reflect improved cognitive flexibility and participants’ subjective feeling that they learned more than they really did.
In terms of the theoretical contribution to learning and instruction, the current findings suggest that segmenting the task to two segments and performing these segments simultaneously can be successfully added to the reach literature of task segmentation for fostering meaningful learning (Doolittle et al., Citation2015; Hasler et al., Citation2007; Lusk et al., Citation2009; Mayer et al., Citation2003; Mayer & Chandler, Citation2001; Mayer & Moreno, Citation2003; Moreno, Citation2007; Spanjers et al., Citation2010). However, the goal achieved in the current research is improved cognitive flexibility instead of pacing the learning, and the method, performing the two segments simultaneously during training, is a modification of the original segmentation method.
5. Conclusions
The described research demonstrated how segmenting the task into two segments and performing the two segments simultaneously improves both cognitive flexibility and the subjective feeling of competence regarding one’s cognitive flexibility (the latter coming at the cost of less precise performance). In contrast, performing nine segments simultaneously was very tedious and did not improve cognitive flexibility. Future research could examine more carefully what the correct number of segments that would help improve trainees’ cognitive flexibility along the continuum between two to nine should be. Additionally, strategies to avoid unnecessary overconfidence should be considered.
It is important to mention that cognitive flexibility can be reflected by not only efficiently switching to different stages in the task, but also by efficient shifting between tasks (Cragg & Chevalier, Citation2012), being sensitive to alternative possibilities (Zmigrod et al., Citation2019), neglecting ineffective goals (Zmigrod et al., Citation2019), and changes in complex behaviors (Canas et al., Citation2006). To encompass the various aspects of cognitive flexibility, these areas should be further studied.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Nirit Yuviler-Gavish
Nirit Yuviler-Gavish serves as the Head of The Center for Engineering Education and Entrepreneurship and is a Senior Lecturer and researcher in the Department of Industrial Engineering and Management, ORT Braude College of Engineering, Karmiel, Israel. Nirit received her Ph.D. in Human factors and human–computer interaction (2008), and her M.Sc. (2003) and B.Sc. in Industrial Engineering and Management from the Technion–Israel Institute of Technology, Haifa. Her main research domains are human factors, human–computer interaction, decision making, augmented reality, virtual reality and cognitive training.
Omer Muati
Omer Muati is a B.Sc. student in the Department of Industrial Engineering and Management, ORT Braude College of Engineering, Karmiel, Israel.
Bar Hodya Gabbay
Bar Hodaya Gabay is a B.Sc. student in the Department of Industrial Engineering and Management, ORT Braude College of Engineering, Karmiel, Israel.
References
- Anzai, Y., & Yokoyama, T. (1984). Internal models in physics problem solving. Cognition and Instruction, 1(4), 397–450. https://doi.org/10.1207/s1532690xci0104_2
- Cañas, J., Quesada, J., Antolí, A., & Fajardo, I. (2003). Cognitive flexibility and adaptability to environmental changes in dynamic complex problem-solving tasks. Ergonomics, 46(5), 482–501. https://doi.org/10.1080/0014013031000061640
- Canas, J. J., Fajardo, I., & Salmeron, L. (2006). Cognitive flexibility. International Encyclopedia of Ergonomics and Human Factors, 1(3), 297–301.
- Claessens, M., Min, R., & Moonen, J. (2000). The use of virtual models for training procedural tasks. In Proceedings International Workshop on Advanced Learning Technologies. IWALT 2000. Advanced learning technology: design and development issues (pp. 229–230). IEEE. https://doi.org/10.1109/IWALT.2000.890615
- Cohen, Y., & Shoval, S. (2020). A new cobot deployment strategy in manual assembly stations: Countering the impact of absenteeism. IFAC-PapersOnLine, 53(2), 10275–10278. https://doi.org/10.1016/j.ifacol.2020.12.2760
- Colzato, L. S., Huizinga, M., & Hommel, B. (2009). Recreational cocaine polydrug use impairs cognitive flexibility but not working memory. Psychopharmacology, 207(2), 225–234. https://doi.org/10.1007/s00213-009-1650-0
- Cragg, L., & Chevalier, N. (2012). The processes underlying flexibility in childhood. Quarterly Journal of Experimental Psychology, 65(2), 209–232. https://doi.org/10.1080/17470210903204618
- Davis, N.. (2016). World Economic Forum: What is the Fourth Industrial Revolution?. In World Economic Forum (Vol. 12, pp. 2020). Available from: https://www.weforum.org/agenda/2016/01/what-is-the-fourth-industrialrevolution/.
- de Giorgio, A., Roci, M., Maffei, A., Jocevski, M., Onori, M., & Wang, L. (2021). Measuring the effect of automatically authored video aid on assembly time for procedural knowledge transfer among operators in adaptive assembly stations. International Journal of Production Research, 1–16. https://doi.org/10.1080/00207543.2021.1970850
- De Winter, J., De Beir, A., El Makrini, I., Van de Perre, G., Nowé, A., & Vanderborght, B. (2019). Accelerating interactive reinforcement learning by human advice for an assembly task by a cobot. Robotics, 8(4), 104. https://doi.org/10.3390/robotics8040104
- Doolittle, P. E., Bryant, L. H., & Chittum, J. R. (2015). Effects of degree of segmentation and learner disposition on multimedia learning. British Journal of Educational Technology, 46(6), 1333–1343. https://doi.org/10.1111/bjet.12203
- Dreisbach, G., & Goschke, T. (2004). How positive affect modulates cognitive control: Reduced perseveration at the cost of increased distractibility. Journal of Experimental Psychology: Learning, Memory, and Cognition, 30(2), 343–353. https://psycnet.apa.org/doi/10.10370278-7393.30.2.343 https://doi.org/10.1037/0278-7393.30.2.343
- Ellis, J. A., Whitehill, B. V., & Irick, C. (1996). The effects of explanations and pictures on learning, retention, and transfer of a procedural assembly task. Contemporary Educational Psychology, 21(2), 129–148. https://doi.org/10.1006/ceps.1996.0012
- El Makrini, I., Elprama, S. A., Van den Bergh, J., Vanderborght, B., Knevels, A.-J., Jewell, C. I. C., Stals, F., De Coppel, G., Ravyse, I., Potargent, J., Berte, J., Diericx, B., Waegeman, T., & Jacobs, A. (2018). Working with Walt: How a cobot was developed and inserted on an auto assembly line. IEEE Robotics & Automation Magazine, 25(2), 51–58. https://doi.org/10.1109/MRA.2018.2815947
- Fast-Berglund, Å., Palmkvist, F., Nyqvist, P., Ekered, S., & Åkerman, M. (2016). Evaluating cobots for final assembly. Procedia CIRP, 44, 175–180. https://doi.org/10.1016/j.procir.2016.02.114
- Frensch, P. A., & Sternberg, R. J. (1989). Expertise and intelligent thinking: When is it worse to know better? In R. J. Sternberg (Ed.), Advances in the psychology of human intelligence, vol. 5 (pp. 157–188). LEA.
- Gentner, D, & Stevens, A. L. (1983). Mental models. Psychology Press, https://doi.org/10.4324/9781315802725
- Goschke, T. (2003). Voluntary action and cognitive control from a cognitive neuroscience perspective. In S. Maasen, W. Prinz, & G. Roth (Eds.), Voluntary action: Brains, minds, and sociality (pp. 49–85). Oxford University Press.
- Hasler, B. S., Kersten, B., & Sweller, J. (2007). Learner control, cognitive load and instructional animation. Applied Cognitive Psychology, 21(6), 713–729. https://doi.org/10.1002/acp.1345
- Hochmitz, I., & Yuviler-Gavish, N. (2011). Physical fidelity versus cognitive fidelity training in procedural skills acquisition. Human Factors, 53(5), 489–501. https://doi.org/10.1177/0018720811412777
- Hommel, B. (2015). Between persistence and flexibility: The Yin and Yang of action control. In Advances in motivation science (Vol. 2, pp. 33–67). Cognitive Psychology Unit & Leiden Institute for Brain and Cognition, Leiden University, Leiden, The Netherlands. Elsevier. https://doi.org/10.1016/bs.adms.2015.04.003
- Irrazabal, N., Saux, G., & Burin, D. (2016). Procedural multimedia presentations: The effects of working memory and task complexity on instruction time and assembly accuracy. Applied Cognitive Psychology, 30(6), 1052–1060. https://doi.org/10.1002/acp.3299
- Johnson-Laird, P. N. (1983). Mental models: Towards a cognitive science of language, inference, and consciousness (No. 6). Harvard University Press, Cambridge.
- Kinast, A., Doerner, K. F., & Rinderle-Ma, S. (2021). Biased random-key genetic algorithm for cobot assignment in an assembly/disassembly job shop scheduling problem. Procedia Computer Science, 180, 328–337. https://doi.org/10.1016/j.procs.2021.01.170
- Klayman, J., Soll, J. B., Gonzalez-Vallejo, C., & Barlas, S. (1999). Overconfidence: It depends on how, what, and whom you ask. Organizational Behavior and Human Decision Processes, 79(3), 216–247. https://doi.org/10.1006/obhd.1999.2847
- Koriat, A., Lichtenstein, S., & Fischhoff, B. (1980). Reasons for confidence. Journal of Experimental Psychology: Human Learning and Memory, 6(2), 107–118. https://doi.org/10.1037/0278-7393.6.2.107
- Kravchenko, A., & Kyzymenko, I. (2019). The fourth industrial revolution: New paradigm of society development or posthumanist manifesto. Philosophy and Cosmology, 22, 120–128. https://doi.org/10.29202/phil-cosm/22/10
- Lusk, D. L., Evans, A. D., Jeffrey, T. R., Palmer, K. R., Wikstrom, C. S., & Doolittle, P. E. (2009). Multimedia learning and individual differences: Mediating the effects of working memory capacity with segmentation. British Journal of Educational Technology, 40(4), 636–651. https://doi.org/10.1111/j.1467-8535.2008.00848.x
- Mayer, R. E. (1999). The promise of educational psychology: Vol. 1, learning in the content areas. Prentice Hall.
- Mayer, R. E. (2002). The promise of educational psychology: Vol. 2, teaching for meaningful learning. Prentice Hall.
- Mayer, R. E., & Chandler, P. (2001). When learning is just a click away: Does simple user interaction foster deeper understanding of multimedia messages? Journal of Educational Psychology, 93(2), 390–397. https://psycnet.apa.org/doi/10.10370022-0663.93.2.390 https://doi.org/10.1037/0022-0663.93.2.390
- Mayer, R. E., Dow, G. T., & Mayer, S. (2003). Multimedia learning in an interactive self-explaining environment: What works in the design of agent-based microworlds?. Journal of Educational Psychology, 95(4), 806–812. https://psycnet.apa.org/doi/10.10370022-0663.95.4.806 https://doi.org/10.1037/0022-0663.95.4.806
- Mayer, R. E., & Moreno, R. (2003). Nine ways to reduce cognitive load in multimedia learning. Educational Psychologist, 38(1), 43–52. https://doi.org/10.1207/S15326985EP3801_6
- Moore, D. A., & Healy, P. J. (2008). The trouble with overconfidence. Psychological Review, 115(2), 502–517. https://doi.org/10.1037/0033-295X.115.2.502
- Moreno, R. (2007). Optimising learning from animations by minimising cognitive load: Cognitive and affective consequences of signalling and segmentation methods. Applied Cognitive Psychology, 21(6), 765–781. https://doi.org/10.1002/acp.1348
- Norman, D. A. (1983) Some observations on mental models. In: Gentner D, Stevens A L (ed) Mental models, Psychology Press, 7–14. https://doi.org/10.4324/9781315802725
- Payne, J. W., Payne, J. W., Bettman, J. R., & Johnson, E. J. (1993). The adaptive decision maker. Cambridge University Press.
- Rittle-Johnson, B., Siegler, R. S., & Alibali, M. W. (2001). Developing conceptual understanding and procedural skill in mathematics: An iterative process. Journal of Educational Psychology, 93(2), 346–362. https://doi.org/10.1037/0022-0663.93.2.346
- Rossi, F., Pini, F., Carlesimo, A., Dalpadulo, E., Blumetti, F., Gherardini, F., & Leali, F. (2020). Effective integration of cobots and additive manufacturing for reconfigurable assembly solutions of biomedical products. International Journal on Interactive Design and Manufacturing (IJIDeM), 14(3), 1085–1089. https://doi.org/10.1007/s12008-020-00682-9
- Salunkhe, O., Stensöta, O., Åkerman, M., Berglund, Å. F., & Alveflo, P. A. (2019). Assembly 4.0: Wheel hub nut assembly using a cobot. IFAC-PapersOnLine, 52(13), 1632–1637. https://doi.org/10.1016/j.ifacol.2019.11.434
- Scheinkman, J. A., & Xiong, W. (2003). Overconfidence and speculative bubbles. Journal of Political Economy, 111(6), 1183–1220. https://doi.org/10.1086/378531
- Schwab, K. (2017). The fourth industrial revolution. Currency.
- Shchenikov, Y. A., Gromova, O. S., & Smeshchuk, E. A. (2021). The human–cobot collaboration in mounting and assembly operations in instrument making. Journal of Physics: Conference Series, 1889(4), 042055. https://doi.org/10.1088/1742-6596/1889/4/042055
- Soll, J. B., & Klayman, J. (2004). Overconfidence in interval estimates. Journal of Experimental Psychology: Learning, Memory, and Cognition, 30(2), 299–314. https://doi.org/10.1037/0278-7393.30.2.299
- Spanjers, I. A. E., van Gog, T., & van Merriënboer, J. J. G. (2010). A theoretical analysis of how segmentation of dynamic visualizations optimizes students’ learning. Educational Psychology Review, 22(4), 411–423. https://doi.org/10.1007/s10648-010-9135-6
- Villani, V., Pini, F., Leali, F., Secchi, C., & Fantuzzi, C. (2018). Survey on human–robot interaction for robot programming in industrial applications. IFAC-PapersOnLine, 51(11), 66–71. https://doi.org/10.1016/j.ifacol.2018.08.236
- Vysocky, A. L. E. S., & Novak, P. (2016). Human-robot collaboration in industry. MM Science Journal, 9(2), 903–906. https://doi.org/10.17973/MMSJ.2016_06_201611
- Wittrock, M. C. (1989). Generative processes of comprehension. Educational Psychologist, 24(4), 345–376. https://doi.org/10.1207/s15326985ep2404_2
- Xu, M., David, J. M., & Kim, S. H. (2018). The fourth industrial revolution: Opportunities and challenges. International Journal of Financial Research, 9(2), 90–95. https://doi.org/10.5430/ijfr.v9n2p90
- Zmigrod, L., Rentfrow, P. J., Zmigrod, S., & Robbins, T. W. (2019). Cognitive flexibility and religious disbelief. Psychological Research, 83(8), 1749–1759. https://doi.org/10.1007/s00426-018-1034-3