
ABSTRACT
This research explored if a social robot would play a role in facilitating the development of friendship between young children while they engage in playful learning. Grounded in child–robot interaction and child development literature, we instantiated four sessions of triadic interaction activities among two children and a robot, where the robot mediated the children’s collaborative interactions. There were two types of robot-mediated activities (Conversational and Tablet assisted) with each type having two sessions and each session taking approx. 20 minutes, depending on the children. The activities were deployed with ten children (aged five to six) in an after-school program in a rural public school in the U.S. twice a week for two weeks. We video-recorded the sessions and later annotated these recordings for analysis. The friendship development between the children in a pair was observed in terms of five behavioral categories (liking, togetherness, parity, agreement, and co-construction). The results showed that both conversational and tablet-assisted robot mediation contributed complementarily to friendship development among the children.
Physically embodied, humanoid robots (a.k.a. social robots) have been gaining increasing interest among researchers in diverse disciplines such as engineering, computer science, healthcare, education, psychology, and communication (Fridin, Citation2014; Kurtz & Kohen-Vacs, Citation2022; Oliveira et al., Citation2021; Peter et al., Citation2021). Child–robot interaction is one promising area due to its affordance for facilitating the balanced development of young children (Janssen et al., Citation2011; Kurtz & Kohen-Vacs, Citation2022; Nalin et al., Citation2012). Research has sought to find ways to develop robotic applications to assist children in various domains of learning and examine their efficacy (Belpaeme et al., Citation2018).
The affordances that social robots can offer while interacting with children seem well suited to support core tenets of child development (Fridin, Citation2014; Oliveira et al., Citation2021; Peter et al., Citation2021). For example, unlike other advanced technologies (e.g. on-screen agents or virtual reality) where children enter synthetic worlds, physically embodied social robots can come into children’s worlds and interact with children in real contexts. A robot’s sensors and movements can support the multimodal and multisensory development of children while they engage in cognitive activities. Indeed, a robot’s movements were conducive to children’s active use of gestures and bodily movements to communicate their understanding of mathematical and science concepts (Kim & Tscholl, Citation2021). Children develop social and affective relationships with their robots; the robots’ emotional expressions can further assist children with their social and affective development (Baxter et al., Citation2017; Chen et al., Citation2020; Kory-Westlund & Breazeal, Citation2019; Ligthart et al., Citation2019). Collectively this can enable embodied social robots to be a viable tool for the holistic development of children, as well as providing practical implications for child development programs.
This study is part of a multi-year research project investigating a robot’s mediation of collaborative interactions among children. Our focus in the study was on a robot’s role in assisting children in developing friendships, referring to the child development literature. A defining characteristic of child development according to the literature is that children learn while they play with peers (Cook, Citation2000; Coolahan et al., Citation2000). We explored robot-mediated interaction activities for socio-technical triadic play, where a robot-mediated collaborative interactions between two kindergarten-aged children (aged five to six).
Child–robot interaction
Literature on human–computer interaction has established that people respond socially to machines and treat them similarly to the way they would treat other humans (Fridin, Citation2014; Kurtz & Kohen-Vacs, Citation2022; Oliveira et al., Citation2021; Peter et al., Citation2021; Reeves & Nass, Citation1996). This tendency seems more prominent with young children than adults. Young children not only anthropomorphize objects and phenomena around them (Berry & Springer, Citation1993; Smith, Citation2010), but also develop social and affective relationships with their anthropomorphized toys and animated on-screen characters and virtual pets (Turkle et al., Citation2004). This phenomenon has been demonstrated among many children regardless of their linguistic and cultural backgrounds (Turkle, Citation2011).
More recently, the human–robot interaction (HRI) community has paid increasing attention to research on child–robot interaction (CRI), and CRI has found a niche in humanoid robotics research (Kennedy et al., Citation2017). Physically embodied, humanoid robots (a.k.a. social robots) that are equipped with various sensors, facial expressions, and bodily movements, might be able to help address critical needs in the development of young children. Child development (spanning ages 2–10) is characterized as an integral coordination of intellectual, social, emotional, and sensorimotor development (McDevitt & Ormrod, Citation2015). That is, early sensorimotor development plays a crucial role in development of the part of the brain that affects successful performance in mathematics and science later (Radesky et al., Citation2015). Unlike other electronic devices (phones and tablets) that affix children to one screen at one station, an embodied social robot allows children’s movement which can support active development both psychologically and physically.
Also, when children interact with a social robot, they seem to engage socially, as opposed to often solitary screen time, as if the robot were a playmate (Martínez-Miranda et al., Citation2018). Children explicitly identify physically embodied humanoid robots (i.e. social robots) as unique beings which are distinct from humans, animals, and other machines (Beran et al., Citation2011; Kim et al., Citation2018), perceive them as life-like, and very often offer companionship to their robots (Turkle, Citation2011). The affinity that young children readily develop with their robots has created a promising space where children demonstrate sustained engagement in interactions with the robot (Baxter et al., Citation2017; Chen et al., Citation2020; Kory-Westlund & Breazeal, Citation2019; Ligthart et al., Citation2019). This seems to enable social robots to be a compelling tool to facilitate the learning and development of children in a variety of applications (Belpaeme, Baxter, Greeff et al., Citation2013; Belpaeme, Baxter, Read et al., Citation2013).
Indeed, research on CRI has investigated a broad range of topics, such as robots’ social behaviors and roles, children’s beliefs in and attribution of mind to a robot, and the comparative effects between robots and humans and between robots and other media. Further, robotic applications have been used in a broad range of domains including language, mathematics, music, motor skills, and socio-emotions (Barreto & Benitti, Citation2012; Cheng et al., Citation2018; Kory-Westlund & Breazeal, Citation2019). In general, robots are more effective in well-defined subject domains like mathematics and science than in ill-defined domains like social skills (Belpaeme et al., Citation2018). In fact, a social robot to assist children’s social and emotional development and assess its efficacy has not yet been widely explored. This area remains largely open.
Child development and friendship
Child development occurs in social and cultural contexts (National Academies of Science, Engineering, and Medicine, Citation2018). The social and cultural environments in which children are placed (such as family and friends) have a critical influence on determining developmental characteristics of the children. Further, according to the Developmentally Appropriate Practice recommended by National Association for the Education of Young Children (Citation2020), play in such contexts is a central practice that facilitates children’s development and learning. At play, children develop intellectually, socially, and physically as they think, innovate, take risks, and construct their understanding of the world (Jones, Citation2003).
When children play with peers, they have opportunities to negotiate, collaborate, empathize, and resolve conflicts, core skills in later development of leadership and problem-solving skills. Learning to develop healthy peer relationships and reciprocal friendships at an early age are as critically important as academic skills acquisition for the long-term well-being of children (Coelho et al., Citation2017; Copple & Bredekamp, Citation2008; Klein et al., Citation2003). Indeed, research finds that children who have difficulty in establishing and maintaining friendships are at risk not only for later academic problems and dropping out of school, but also for criminality and mental health problems (Morison & Masten, Citation1991; Pedersen et al., Citation2007). In contrast, children with reciprocal friendships demonstrated higher social competence (Vaughn et al., Citation2001). The ability to effectively make friends at an early age has a significant influence on individuals’ mental, emotional, and physical well-being as well as socio-cognitive development (Bukowsky & Sippola, Citation2005; Niffenegger & Willer, Citation1998).
In conventional education research and practice, however, children’s friendship development is often neglected, perhaps, due to the individualistic, elusive nature of friendship development. Some existing strategies and interventions for friendship development are limited only to deal with children with disabilities (Buysse et al., Citation2003; Frea et al., Citation1999; Hollingsworth & Buysee, Citation2009). Empirical research has rarely been conducted on peer relations and friendship development for non-disabled children in an ordinary context (Carter & Nutbrown, Citation2016).
Research purpose
In this study, the authors inquired if social robotic technology could assist young children with collaborative friendship development. Children should be provided with an opportunity to develop friendships in a psychologically safe environment (Niffenegger & Willer, Citation1998). This environment can promote positive social interaction with their peers, allows children to learn about each other, and interact collaboratively (Burk, Citation1996). Also, time and space for shared activities and playful interactions help children nurture and develop friendships on their own (Carter & Nutbrown, Citation2016). A social robot acting as a simulated peer can be designed to offer such a safe space that allows children’s autonomy and is free from external judgement or biases to facilitate constructive friendship development among children.
Friendship, defined as a mutual preference for peer interaction (Howes, Citation2009), is a multifaceted phenomenon. It is manifested in various behavioral patterns such as mutual affection, togetherness, companionship, reciprocity during play, and parity (Howes, Citation2009; Lauren & Hartup, Citation2002; Rubin et al., Citation2005). The thoughts, language, and emotions of young children are still developing, and friendship development is typically inferred from their behaviors while they interact and play (Papadopoulou, Citation2016), rather than measured by the classical pre/post surveys or interviews. In the present study, we sought whether a robot would be able to assist children with friendship development when designed appropriately. This study was conducted in compliance with the ethical principles and code of conduct issued by the American Psychological Association.
Method
Design of robot mediation: conversational and tablet-assisted interaction activities
We instantiated a small triadic interaction community of a robot and two children where the robot-mediated collaborative and equitable interactions between the children. The interaction design was grounded in child development theory which states that children like to engage in fantasy play with peers, conversing and doing things together to achieve a shared goal (McDevitt & Ormrod, Citation2015). We introduced the robot, Skusie, as a new friend who just arrived from another planet and wanted to know more about life on earth. A mobile phone is cradled on the head of Skusie and controlled by Android mobile application (see ). Optional sensors and microphone are embedded on the body of the Skusie that can speak and move. In addition, with the use of main controller, researchers can manually provide speech utterances and control its motion.
Figure 1. Robot Skusie.

Two children in each pair were asked to work together to help Skusie to learn. The topics for their interactions, animals and birthdays, were familiar and relevant to children. We adopted a Wizard of Oz method to control Skusie, where a hidden researcher remotely controlled Skusie’s utterances and bodily movements (e.g. nodding its head and moving to get close to a child for attention) while children interacted with it. The process of this robot-mediated activity was iterative in a repeated cycle of design, testing, and refinement with another group of children (Kim et al., Citation2018).
Children do many activities in play. Two of the most common activities are conversation and physically doing things together. We designed two activities: one for conversation and the other for tablet-assisted designing digital artifacts, in which children do things together in response to Skusie’s requests for creating a zoo and preparing a birthday party on their planet. The robot-mediated activities engaged children in two types of interactions: conversational and tablet-assisted design of digital artifacts (see ). In the two conversational sessions (Animal I and Birthday I), Skusie asked several types of questions to prompt children to engage in conversations with each other on the topics. For example, Skusie asked open-ended questions such as What are animals? What are birthdays? What do you do on your birthday? To prompt children to share their personal experiences, Skusie asked questions such as Do you have pets at home? What do you do with them? What did you do at your last birthday? Further, to prompt elaboration on a specific topic, Skusie would also ask why questions such as Why? tell me more! Finally, Skusie also prompted children to negotiate and collaborate with questions such as Can you work together? Can you two agree first? And it made encouraging statements such as We are a team!
Figure 2. Two types of robot-mediated interaction activities: conversational and tablet assisted.

The two tablet-assisted design sessions (Animal II and Birthday II) focused on children physically doing things together. In these sessions, Skusie asked children to help build an imaginary zoo for its planet, using a shared tablet (Animal II) and to help prepare a birthday party for Skusie’s friend (Birthday II). The children started these activities with a blank tablet screen and dragged and dropped the relevant items from the built-in item libraries to create a zoo and a party room. The item libraries included several image clips of animals, food, and habitats for Animal II, and the images of invitation cards, birthday cakes, party decorations, and party room furniture for Birthday II. To succeed in these tasks, children had to agree to choose one item at a time from the libraries and take turns to drag and drop the item to the target area. Skusie moderated the children’s collaboration reminding them such as Do you agree? Can you take turns? What’s next? when necessary and expressed its excitement verbally, Awesome! I like that! when they progressed. Children participated in the activities in the following order: Animal I (conversational), Animal II (tablet assisted), Birthday I (conversational), and Birthday II (tablet assisted). presents sample screenshots for the two types of interactions.
Participants and study context
The participants were 10 young children just starting public school (aged five to six). In the present study, ten kindergarten-aged children (six girls and four boys) from an elementary school in a small industrial town in the Midwestern U.S. Five children were from English-speaking families, and five children were from Spanish-speaking families. All children spoke English fluently. Parental consent was obtained for all participating children prior to the study.
Prior to the intervention, we asked the children to indicate their two to three best friends and avoided pairing best friends together, ensuring that the pairs would develop new friendships during the intervention. Four pairs were mixed gender, and one pair was girls only. Each pair participated in all four interaction sessions (each taking approx. 20 minutes). The interaction activities were implemented for two days per week over two weeks during an after-school program run by the school. Video and audio records were obtained by using two cameras and four microphones.
Multimodal assessment of friendship behaviors
Our target age group was quite young, and their communication was multimodal and richly embodied involving speech, facial expressions, gestures, and bodily movements. We employed an observational approach to assessing children’s friendship behaviors. This approach has been increasingly used in education research, overcoming some shortcomings of traditional measurements such as self-report surveys or interviews (Paris, Citation2012). In this approach, trained observers annotate behavior using predefined categories and their behavioral indicators.
Annotation of video recording
We first annotated video recordings of pairs of children manually. We developed a coding scheme consisting of five friendship behaviors (liking, togetherness, parity, agreement, and co-construction) and we defined behavioral indicators (BIs) for each, as presented in . BIs captured children’s eye gaze, gestures, posture, and bodily orientation and movements as well as their utterances. The presence or absence of a BI within a prespecified time segment was systematically recorded. Changes in friendship behaviors were traced over time and subsequently linked to other BIs or concurrent events.
Table 1. Friendship behaviors and indicators.
Two student researchers and one senior researcher annotated the video records, using the commercial software INTERACT. Video recordings were segmented into 5-second intervals (Crompton et al., Citation2018), and the coders annotated whether a behavioral indicator was present in each 5-second segment (1) or not (0). First, they coded 5-minute segments of randomly selected videos independently and then calculated Cohen’s kappa to check for inter-rater reliability. The coders discussed any coding discrepancies in person.
During this process, more behavioral indicators were identified and added to a code book. This adjustment process was repeated until the kappa values for all behavioral indicators reached above .88, indicating a strong agreement between coders. Second, the two student researchers then coded the entire video data independently, Cohen’s kappa was .92. The discrepancies were solved through discussions with two student researchers and one senior researcher.
Results
Frequency data for statistical testing
We aggregated the coding values of each behavioral indicator into 1-minute intervals to assess how frequently each of the five friendship behaviors was observed in the conversational and tablet-assisted interactions mediated by the robot (see ). The time series plot in showed the differences in friendship behaviors between the conversational and tablet-assisted sessions over time. For instance, the co-construction behavior manifested consistently higher during the tablet-assisted sessions than during the conversational sessions. In addition, the mean and standard deviation of the frequency of each behavior variable by interaction type (conversational and tablet assisted) are presented in below. The five friendship behavior variables included liking, togetherness, parity, agreement, and co-construction.
Figure 3. Time series plot of friendship behaviors.
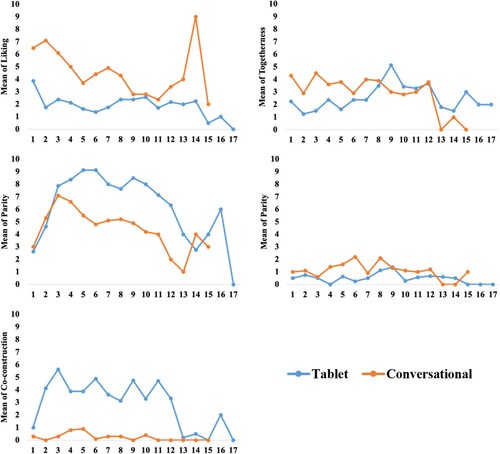
Table 2. Means and standard deviations of friendship behavior variables.
Robot-mediated interactions for friendship
The research question of interest was whether the designed robot-mediation influenced children’s friendship behaviors. The Wilcoxon Signed-Rank Test in was employed to determine the statistical difference in friendship behavior between the conversational and tablet-assisted sessions. Due to the non-normality of the data, we conducted non-parametric analysis (Wilcoxon Signed-Rank Test) using IBM SPSS Statistics 24. This technique is a non-parametric alternative to a paired t-test used to compare paired data (conversational vs. tablet-assisted). The negative ranks, positive ranks, and test statistics of each behavior variable were calculated. The statistical significance was set at p < 0.05.
Table 3. Wilcoxon signed-rank test results for friendship behavior, not liking behavior.
Liking
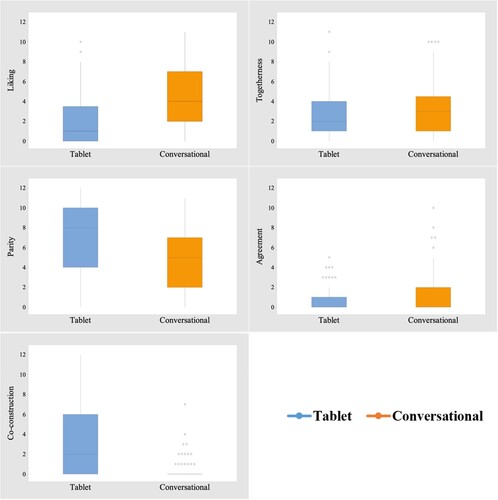
shows the results of the Wilcoxon Signed-Rank test of children’s liking behavior in two types of robot-mediated interactions: conversational and tablet-assisted. Liking was significantly differentiated by the interaction type (p < 0.001). Children showed liking behaviors in the conversational robot mediation more frequently than in the tablet-assisted robot mediation. The box plots in show the variation in friendship behavior across children for each conversational and tablet-assisted session. For example, the amount of liking was more spread out across children during the conversational session compared to the tablet-assisted session.
Figure 4. Box plots of friendship behaviors.
Togetherness
shows the results of the Wilcoxon Signed-Rank test of the togetherness behavior in two types of robot-mediated interactions: conversational and tablet assisted. Togetherness was significantly differentiated by the interaction type (p = 0.005). Children showed togetherness behaviors in the conversational robot mediation more frequently than in tablet-assisted robot mediation (see box plots in ).
Parity
shows the results of the Wilcoxon Signed-Rank test of the parity behavior in two types of robot-mediated interactions: conversational and tablet assisted. Parity was significantly differentiated by the interaction type (p < 0.001). Children showed parity behavior in the tablet-assisted robot mediation more frequently than in the conversational robot mediation (see box plots in ).
Agreement
shows the results of the Wilcoxon Signed-Rank test of the agreement behavior in two types of robot-mediated interactions: conversational and tablet assisted. Agreement was significantly differentiated by the interaction type (p = 0.002). Children showed agreement behavior in the conversational robot mediation more frequently than in the tablet-assisted robot mediation (see box plots in ).
Co-Construction
shows the results of the Wilcoxon Signed-Rank test of the co-construction behavior in two types of robot-mediated interactions: conversational and table assisted. Co-construction was significantly differentiated by the interaction type (p < 0.001). Children showed co-construction behavior in the tablet-assisted robot mediation more frequently than in the conversational robot mediation (see box plots in ).
Discussion
Grounded in child–robot interaction research and child development theory, this study examined a social robot’s role in facilitating children’s collaborative friendship development. By implementing two types of robot-mediated activities (conversational and tablet-assisted design), we found children engaged in five friendship behaviors: liking, togetherness, parity, agreement, and co-construction (see ). The robot-mediated conversational sessions induced more liking, togetherness, and agreement behaviors between two children than the robot-mediated tablet sessions (see and ). On the other hand, parity and co-construction behaviors were more evident during the tablet sessions than during the conversational sessions. The results showed that children demonstrated friendship behaviors differently according to the type of robot-mediated interaction activities.
In a sense, these differences in friendship behaviors by the interaction type were inherent in our designs. During the conversational sessions, when the robot asked a question, children typically demonstrated liking behavior, e.g. smiling at each other. When children presented conflicting pieces of information, the robot told them, “I am confused. Can you two agree first?” Then children discussed the matter with each other and demonstrated agreement behavior. During the tablet sessions, the items in the libraries were initially split into two pieces, so each child had to take turns and drag and drop one piece at a time to complete the whole. Very often some children tried to make all the selections by themselves. When this happened, the robot spoke out, “can you take turns?” or “Max, can you yield to Lini?” The robot’s mediation worked well and was followed by the immediate correction of the children’s behavior.
Of note was children’s willingness to listen to the robot and voluntarily respond to its requests. This phenomenon is not commonly observed during children’s interactions with a human caregiver: for example, a previous study showed that children were significantly less engaged and distracted more with a human moderator than with a robot throughout the interaction sessions (Kim et al., Citation2018). The robot’s identity as an alien peer seemed to trigger the children’s curiosity as well as a sense of play. Once children acknowledged the robot as their playmate, they seemed to embrace the robot’s direct speech style as innocuous and willingly accepted its requests. Also, children were patient with the robot’s technical glitches and forgave its errors, often even finding them fun. We suspect that this kind of voluntary acceptance by the children of the robot also enabled children’s sustained engagement in their collaborative learning and play. Very similar phenomena have been observed in previous studies (e.g. Chen et al., Citation2020; Kennedy et al., Citation2015; Kim et al., Citation2018), collectively confirming the constructive role that a social robot can play in the development of children in various domains.
Also, the robot’s potential for supporting equitable development of children is worthy of note. An incidental observation from our study was that children assigned similar gender attributes as themselves to the robot: i.e. girls said that Skusie was a girl and called it “her”; boys called it “him”. Robot identities are by nature neutral in many ways and not imbued with human characteristics, so designers can design flexibly to address the social and cultural needs of a child. The robot also could be multilingual, speaking any language of interest. This potential is important, given that the racial, ethnic, and gender dynamics between students and teachers significantly influenced the learning gains of students (Dee, Citation2005) and that cross-ethnic friendships help reduce cognitive biases against outgroups (Ellison & Powers, Citation1994) and develop positive intergroup attitudes (Pettigrew, Citation1998). The unbiased identity of a robot opens opportunities for designers to define a robot as a cultural mediator to help develop constructive intergroup friendships (Kim, Citation2016).
Lessons learned from the present study are also aligned with some tenets of the literature on child development. Our target age group of children is still developing intellectually, emotionally, socially, and physically, with great individual differences (Clark, Citation2009). Likewise, the children in the study varied greatly in verbal and gestural expressiveness and bodily motions: e.g. some children talking a lot, some nodding or using hand gestures constantly but not talking, and others physically moving around the interaction space. Alternating the robot-mediated activities between conversational and tablet-assisted designing of digital artifacts seemed to have worked effectively to accommodate such individual differences. Likewise, we believe that assessing multimodal friendship behaviors during the activities provided more authentic and valid assessments of friendship development compared to classical surveys or interviews a posteriori. Overall, this study showed that social robots, when designed appropriately, could be an effective tool to address the lack of interventions to support healthy friendship development in formal and informal education settings.
Limitations and future research
We acknowledge this study is somewhat limited. Some may find that the approx. twenty-minute-long interaction time in each session was too short to obtain reliable research outcomes. We implemented the robot-mediated activity using ordinary kindergarten classes, pulling out each child pair one by one from class. Although each research observation session took about 20 minutes per pair, the total time spent on an interaction session (from introduction to conclusion) took almost the whole class hour. This also limited our sample size. We used manual annotations of multimodal behaviors. It demanded a great deal of resources, presenting a big challenge in continuing this line of research. In future research, advanced sensor and image processing technologies, such as the optical motion capture system and inertial measurement unit sensors, could provide an extensive dataset on time and over time and reduce the burden of manual annotations. Lastly, future research may confirm our findings by comparing the robot-mediated interaction group with a control group without the interaction.
Ethics in human subjects
This research, involving human subjects, was approved by Northern Illinois University’s Internal Review Board prior to conducting the research.
Acknowledgements
Authors’ contribution: Yanghee Kim: Conceptualization, design of child–robot interaction (CRI) activities, study implementation, and writing. Jaejin Hwang: Multimodal data analysis and writing methodology and results, discussion. Seongmi Lim: Conceptualization and writing on friendship development. Moon-Heum Cho: Writing, review & editing. Sungchul Lee: CRI technology development, writing coordination.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Barreto, F., & Benitti, V. (2012). Exploring the educational potential of robotics in schools: A systematic review. Computers & Education, 58(1), 978–988. https://doi.org/10.1016/j.compedu.2011.10.006
- Baxter, P., Ashurst, E., Read, R., Kennedy, J., & Belpaeme, T. (2017). Robot education peers in a situated primary school study: Personalization promotes child learning. PLoS ONE, 12(5), Article e0178126. https://doi.org/10.1371/journal.pone.0178126
- Belpaeme, T., Baxter, P., Greeff, J. d., Kennedy, J., Read, R., Looije, R., Neerincx, M., Baroni, I., & Zelati, M. C. (2013). Child-robot interaction: Perspectives and challenges. In G. Herrmann, M. J. Pearson, A. Lenz, P. Bremner, A. Spiers, & U. Leonards (Eds.), Social robotics: Lecture notes in computer science (Vol. 8239, pp. 452–459). Springer. https://doi.org/10.1007/978-3-319-02675-6_45
- Belpaeme, T., Baxter, P., Read, R., Wood, R., Cuaýahuitl, H., Kiefer, B., Racioppa, S., Ivana, K., Athanasopoulos, G., Enescu, V., Looije, R., Neerincx, M., Demiris, Y., Ros-Espinoza, R., Beck, A., Cãnamero, L., Hiolle, A., Baroni, I., Nalin, M., … Humbert, R. (2013). Multimodal child robot interaction: Building social bonds. Journal of Human Robot Interaction, 1(2), 33–53. https://doi.org/10.5898/JHRI.1.2.Belpaeme
- Belpaeme, T., Kennedy, J., Ramachandran, A., Scassellati, B., & Tanaka, F. (2018). Social robots for education: A review. Science Robotics, 3(21), Article eaat5954. https://doi.org/10.1126/scirobotics.aat5954
- Beran, T., Ramirez-Serrano, A., Kuzyk, R., Fior, M., & Nugent, S. (2011). Understanding how children understand robots: Perceived animism in child-robot interaction. International Journal of Human-Computer Studies, 69(7–8), 539–550. https://doi.org/10.1016/j.ijhcs.2011.04.003
- Berry, D. S., & Springer, K. (1993). Structure, motion, and preschoolers’ perceptions of social causality. Ecological Psychology, 5(4), 273–283. https://doi.org/10.1207/s15326969eco0504_1
- Bukowsky, W. M., & Sippola, L. K. (2005). Friendship and development: Putting the most human relationship in its place. New Directions for Child and Adolescent Development, 2005(109), 91–98. https://doi.org/10.1002/cd.141
- Burk, D. I. (1996). Understanding friendship and social interaction. Childhood Education, 72(5), 282–285. https://doi.org/10.1080/00094056.1996.10521867
- Buysse, V., Goldman, B. D., & Skinner, M. L. (2003). Friendship formation in inclusive early childhood classrooms: What is the teacher’s role? Early Childhood Research Quarterly, 18(4), 485–501. https://doi.org/10.1016/j.ecresq.2003.09.007
- Carter, C., & Nutbrown, C. (2016). A pedagogy of friendship: Young children’s friendships and how schools can support them. International Journal of Early Years Education, 24(4), 395–413. https://doi.org/10.1080/09669760.2016.1189813
- Chen, H., Park, H. W., & Breazeal, C. (2020). Teaching and learning with children: Impact of reciprocal peer learning with a social robot on children’s learning and emotive engagement. Computers & Education, 150, Article 103836. https://doi.org/10.1016/j.compedu.2020.103836
- Cheng, Y. W., Sun, P. C., & Chen, N. S. (2018). The essential applications of educational robot: Requirement analysis from the perspectives of experts, researchers and instructors. Computers & Education, 126, 399–416. https://doi.org/10.1016/j.compedu.2018.07.020
- Clark, E. V. (2009). First language acquisition (2nd ed.). Cambridge University Press.
- Coelho, L., Torres, N., Fernandes, C., & Santos, A. J. (2017). Quality of play, social acceptance and reciprocal friendship in preschool children. European Early Childhood Education Research Journal, 25(6), 812–823. https://doi.org/10.1080/1350293X.2017.1380879
- Cook, G. (2000). Language play, language learning. Oxford University Press.
- Coolahan, K., Fantuzzo, J., Mendez, J., & McDermott, P. (2000). Preschool peer interactions and readiness to learn: Relationships between classroom peer play and learning behaviors and conduct. Journal of Educational Psychology, 92(3), 458–465. https://doi.org/10.1037/0022-0663.92.3.458
- Copple, C., & Bredekamp, S. (2008). Developmentally appropriate practice in early childhood program serving children from birth through age 8. National Association for the Education and Young Children.
- Crompton, H., Gregory, K., & Burke, D. (2018). Humanoid robots supporting children’s learning in an early childhood setting. British Journal of Educational Technology, 49(5), 911–927. https://doi.org/10.1111/bjet.12654
- Dee, T. S. (2005). A teacher like me: Does race, ethnicity, or gender matter? American Economic Review, 95(2), 158–165. https://doi.org/10.1257/000282805774670446. https://www.jstor.org/stable/4132809
- Ellison, C. G., & Powers, D. A. (1994). The contact hypothesis and racial attitudes among Black Americans. Social Science Quarterly, 75, 385–400.
- Frea, W., Craig-Unkefer, L., Odom, S. L., & Johnson, D. (1999). Differential effects of structured social integration and group friendship activities for promoting social interaction with peers. Journal of Early Intervention, 22(3), 230–242. https://doi.org/10.1177/105381519902200306
- Fridin, M. (2014). Kindergarten social assistive robot: First meeting and ethical issues. Computers in Human Behavior, 30, 262–272. https://doi.org/10.1016/j.chb.2013.09.005
- Hollingsworth, H. L., & Buysee, V. (2009). Establishing friendships in early childhood inclusive settings: What roles do parents teachers play? Journal of Early Intervention, 31(4), 287–307. https://doi.org/10.1177/1053815109352659
- Howes, C. (2009). Friendship in early childhood. In K. H. Rubins, W. M. Bukowski, & B. Lauresen (Eds.), Handbook of peer interactions, relationships, and groups (pp. 180–194). Guilford Press.
- Janssen, J. B., van der Wal, C. C., Neerincx, M. A., & Looije, R. (2011). Motivating children to learn arithmetic with an adaptive robot game. In B. Mutlu, C. Bartneck, J. Ham, V. Evers, & T. Kanda (Eds.), ICSR 2011. LNCS (vol. 7072, pp. 153–162). Springer.
- Jones, E. (2003). Playing to get smart. Young Children, 58(3), 32–36. https://www.jstor.org/stable/42729776
- Kennedy, J., Baxter, P., & Belpaeme, T. (2015). Comparing robot embodiments in a guided discovery learning interaction with children. International Journal of Social Robotics, 7(2), 293–308. https://doi.org/10.1007/s12369-014-0277-4
- Kennedy, J., Lemaignan, S., Montassier, C., Lavalade, P., Irfan, B., Papadopoulos, F., Senft, E., & Belpaeme, T. (2017, March 6–9). Child speech recognition in human-robot interaction: Evaluations and recommendations. Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria (pp. 82–90). https://doi.org/10.1145/2909824.3020229
- Kim, M., Yi, S., & Lee, D. (2018). Between living and nonliving: Young children's animacy judgments and reasoning about humanoid robots. PLoS ONE, 14(6), Article e0216869. https://doi.org/10.1371/journal.pone.0216869
- Kim, Y. (2016). Designing a robot for cultural brokering in education. Educational Technology, 56(4), 41–43. https://www.jstor.org/stable/44430477
- Kim, Y., Mark, S., Pham, H., & Nguyen, T. T. (2018). Designing technology as a cultural broker for young children: Challenges and opportunities. ICLS proceedings. In J. Kay, & R. Luckin (Eds.), Proceedings of the 13th international conference of the learning sciences (ICLS) 2018: Vol. 1. (pp. 88–95). International Society of the Learning Sciences. https://repository.isls.org//handle/1/475
- Kim, Y., & Tscholl, M. (2021). Young children’s embodied interactions with a social robot. Educational Technology Research and Development, 69(4), 2059–2081. https://doi.org/10.1007/s11423-021-09978-3
- Klein, T. P., Wirth, D., & Linas, K. (2003). Play: Children’s context for development. Young Children, 58(3), 38–45. https://www.jstor.org/stable/42729778
- Kory-Westlund, J. M., & Breazeal, C. (2019). Exploring the effects of a social robot’s speech entrainment and backstory on young children’s emotion, rapport, relationship, and learning. Frontiers in Robotics and AI, 6, Article 54. https://doi.org/10.3389/frobt.2019.00054
- Kurtz, G., & Kohen-Vacs, D. (2022). Humanoid robot as a tutor in a team-based training activity. Interactive Learning Environments. Advance online publication. https://doi.org/10.1080/10494820.2022.2086577
- Lauren, B., & Hartup, W. W. (2002). The origins of reciprocity and social exchange in friendship. New Directions for Child and Adolescent Development, 2002(95), 27–40. https://doi.org/10.1002/cd.35
- Ligthart, M., Fernhout, T., Neerincx, M. A., Van Bindsbergen, K. L. A., Grootenhuis, M. A., & Hindriks, K. V. (2019, May 13–17). A child and a robot getting acquainted - interaction design for eliciting self-disclosure. Proceedings of the International Joint Conference on Autonomous Agents and Multiagent Systems, AAMAS, Montreal QC, Canada (pp. 61–70).
- Martínez-Miranda, J., Perez-Espinosa, H., Espinosa-Curiel, I., Avila-George, H., & Rodríguez-Jacobo, J. (2018). Age-based differences in preferences and affective reactions towards a robot's personality during interaction. Computers in Human Behavior, 84, 245–257. https://doi.org/10.1016/j.chb.2018.02.039
- McDevitt, T. M., & Ormrod, J. E. (2015). Child development and education. Pearson.
- Morison, P., & Masten, A. (1991). Peer reputation in childhood as a predictor of adaption in adolescence: A seven year follow-up. Child Development, 62(5), 991–1007. https://doi.org/10.2307/1131148
- Nalin, M., Baroni, I., Kruijff-Korbayová, I., Cãnamero, L., Lewis, M., Beck, A., Cuaý Lahuitl, H., & Sanna, A. (2012, September 9–13). Children’s adaptation in multi-session interaction with a humanoid robot. Proceedings of the Ro-Man Conference, Paris, France. https://doi.org/10.1109/ROMAN.2012.6343778
- National Academies of Science, Engineering, and Medicine. (2018). How people learn II: Learners, contexts, and cultures. The National Academies Press. https://doi.org/10.17226/24783
- National Association of the Education of Young Children. (2020). Position statement: Developmentally appropriate practice. https://www.naeyc.org/resources/position-statements/dap/principles
- Niffenegger, J. P., & Willer, L. R. (1998). Friendship behaviors during early childhood and beyond. Early Childhood Education Journal, 26(2), 95–99. https://doi.org/10.1023/A:1022903329637
- Oliveira, R., Arriaga, P., Santos, F., Mascarenhas, S., & Paiva, A. (2021). Towards prosocial design: A scoping review of the use of robots and virtual agents to trigger prosocial behavior. Computers in Human Behavior, 114, Article 106547. https://doi.org/10.1016/j.chb.2020.106547
- Papadopoulou, M. (2016). The ‘space’ of friendship: Young children’s understandings and expressions of friendship in a reception class. Early Child Development and Care, 186(10), 1544–1558. https://doi.org/10.1080/03004430.2015.1111879
- Paris, D. (2012). Culturally sustaining pedagogy: A needed change in stance, terminology, and practice. Educational Researcher, 41(3), 93–97. https://doi.org/10.3102/0013189X12441244
- Pedersen, S., Vitaro, F., Barker, E. D., & Borge, A. I. H. (2007). The timing of middle-childhood peer rejection and friendship: Linking early behavior to early-adolescent adjustment. Child Development, 78(4), 1037–1051. https://doi.org/10.1111/j.1467-8624.2007.01051.x. https://www.jstor.org/stable/4620688
- Peter, J., Kühne, R., & Barco, A. (2021). Can social robots affect children’s prosocial behavior? An experimental study on prosocial robot models. Computers in Human Behavior, 120, Article 106712. https://doi.org/10.1016/j.chb.2021.106712
- Pettigrew, T. F. (1998). Intergroup contact theory. Annual Review of Psychology, 49(1), 65–85. https://doi.org/10.1146/annurev.psych.49.1.65
- Radesky, J. S., Schumacher, J., & Zuckerman, B. (2015). Mobile and interactive media use by young children: The good, the bad, and the unknown. Pediatrics, 135(1), 1–3. https://doi.org/10.1542/peds.2014-2251
- Reeves, B., & Nass, C. (1996). The media equation: How people treat computers, television, and new media like real people and places. Cambridge University Press.
- Rubin, K. H., Coplan, R., Chen, X., Buskirt, A. A., & Wojslawowicz, J. C. (2005). Peer relationships in childhood. In M. H. Bornstein, & M. E. Lamb (Eds.), Developmental science: An advance textbook (pp. 469–512). Erlbaum.
- Smith, P. K. (2010). Children and play: Understanding children’s worlds. Wiley-Blackwell.
- Turkle, S. (2011). Alone together: Why we expect more from technology and less from each other. Basic Books.
- Turkle, S., Breazeal, C. L., DastÅLe, O., & Scassellati, B. (2004). Encounters with kismet and cog: Children respond to relational artifacts. IEEE-RAS/RSJ International Conference on Humanoid Robots, Los Angeles, CA.
- Vaughn, B. E., Colvin, T. N., Azria, M. R., Caya, L., & Krysik, L. (2001). Dyadic analyses of friendship in a sample of preschool-age children attending Head Start: Correspondence between measures and implications for social competence. Child Development, 72(3), 862–878. https://doi.org/10.1111/1467-8624.00320