
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In a convex mosaic in we denote the average number of vertices of a cell by
and the average number of cells meeting at a node by
Except for the d = 2 planar case, there is no known formula prohibiting points in any range of the
plane (except for the unphysical
strips). Nevertheless, in d = 3 dimensions if we plot the 28 points corresponding to convex uniform honeycombs, the 28 points corresponding to their duals and the 3 points corresponding to Poisson-Voronoi, Poisson-Delaunay and random hyperplane mosaics, then these points appear to accumulate on a narrow strip of the
plane. To explore this phenomenon we introduce the harmonic degree
of a d-dimensional mosaic. We show that the observed narrow strip on the
plane corresponds to a narrow range of
We prove that for every
there exists a convex mosaic with harmonic degree
and we conjecture that there exist no d-dimensional mosaic outside this range. We also show that the harmonic degree has deeper geometric interpretations. In particular, in case of Euclidean mosaics it is related to the average of the sum of vertex angles and their polars, and in case of 2 D mosaics, it is related to the average excess angle.
Keywords and phrases:
1. Introduction
1.1. Definition and brief history of mosaics
A d-dimensional mosaic is a countable system of compact domains in
with nonempty interiors, that cover the whole space and have pairwise no common interior points [Citation11]. We call a mosaic convex if these domains are convex and in this case all domains are convex polytopes [Citation11, Lemma 10.1.1]. In this paper we deal only with convex mosaics. We call these polytopes the cells of the mosaic, the k-dimensional faces of the cells, for
the faces of the mosaic, and the vertices of the cells the nodes of the mosaic. In particular, in case of 3-dimensional mosaics, we may use the term face instead of facet of the mosaic. A cell having v vertices is called a cell of degree v, and a node which is the vertex of n cells is called a node of degree n. Our prime focus is to determine how average values of these quantities, denoted by
and
respectively, depend on each other. We remark that for planar regular mosaics, the pair
is called the Schläfli symbol of the mosaic so, by generalizing this concept, we will refer to the
plane as the symbolic plane of convex mosaics. These, and closely related global averages have been studied before and proved to be powerful tools in the geometric study of mosaics: in [Citation9] the planar isoperimetric problem restricted to convex polygons with v < 6 vertices is resolved using these quantities.
Our main focus will be face-to-face mosaics, in which any two distinct cells intersect in a common face or have empty intersection. Unless stated otherwise, any mosaic discussed in our paper will be a convex face-to-face mosaic and we will only discuss non face-to-face mosaics in Subsection 4.2. Furthermore, we assume that the mosaic is normal, that is, for some each cell contains a ball of radius r, and is contained in a ball of radius R (see, e.g. [Citation13]). This implies, in particular, that the volumes of the cells are bounded from above, and that the mosaic is locally finite; that is, each point of space belongs to finitely many cells. We note that a precise definition of
and
can be obtained in the usual way, that is, by taking the limit of the average degrees of cells/nodes contained in a large ball whose radius tends to infinity. Here, we always tacitly assume that these limits exist.
Geometric intuition suggests that and
should have an inverse-type relationship: more polytopes meeting at a node implies smaller internal angles in the polytopes, which, in turn, suggests a smaller number of vertices for each polytope. To be able to verify this intuition we introduce
Definition 1.
The harmonic degree of a mosaic is defined as
(1)
(1)
where
denote the average cell and nodal degrees of
respectively.
The variation of the harmonic degree (computed on an ensemble of mosaics) may serve as a measure of how good our intuition was: a constant value of
describes an exact inverse-type relationship while small variation of
still indicates that our intuitive approach is, to some extent, justified. To describe a deeper, geometric meaning of the harmonic degree we introduce
Definition 2.
Let be a mosaic, C be a cell of
and p be a vertex of C. Then the total angle
of the pair (C, p) is the sum of the internal and external angles of C at p; the former defined as the surface area of the spherical convex hull of the unit tangent vectors of the edges of C at p, the latter defined as the surface area of the set of the outer unit normal vectors of C at p. The average total angle
associated with the mosaic
is defined as the average of
taken over all pairs (C, p) in
Although appears to be a combinatorial property and
appears to be a metric property of the mosaic, nevertheless, they are closely linked, which is expressed in
Theorem 1.
Let be a convex, face-to-face mosaic in
and let
denote the surface area of the d-dimensional unit sphere. Then we have
We will prove Theorem 1 in Section 3, and in Section 4 we extend it to 2-dimensional spherical mosaics. Since there is no natural definition of average for hyperbolic mosaics (cf. also Subsection 4.1.2), Theorem 1 cannot be extended to mosaics in hyperbolic planes. While is constant in d = 2 dimensions for Euclidean mosaics (implying, via Theorem 1, constant value for the harmonic degree
) however, if d > 2 then
may vary, so our original intuition appears to become ambiguous for d > 2 and the variation of
will serve as an indicator of this ambiguity.
In one dimension (d = 1) we have for each cell and vertex and thus, trivially
for all mosaics. In two dimensions one can have cells and nodes of various degrees, nonetheless, it is known [Citation11, Theorem 10.1.6] that for all convex mosaics
The situation in d = 3 dimensions appears, at least at first sight, to be radically different. Schneider and Weil [Citation11] provide the general equations governing 3D random mosaics. In Section 2 we present an elementary proof that the same governing equations hold for any convex mosaic under some simple finiteness condition. These equations have three variable parameters. We also show that, beyond the trivial inequalities these formulae do not yield additional constraints on
suggesting that in the
symbolic plane, except for the unphysical domains characterized by
we might expect to see mosaics anywhere. However, this is not the case if we look at the best known mosaics: uniform honeycombs. The latter are a special class of convex mosaics where cells are uniform polyhedra and all nodes are equivalent under the symmetry group of the mosaic. The list of all possible convex uniform honeycombs was completed only recently by Johnson [Citation8] who described 28 such mosaics (for more details on the 28 uniform honeycombs see [Citation2, Citation7] and more details on the history see [Citation10]). To provide the complete list of these 28 honeycombs has been a major result in discrete geometry. If these mosaics were spread out on the
symbolic plane, that would certainly imply that the associated values of the harmonic degree
cover a very broad range. However, this is not the case: all values of
are in the range
In addition, we also computed the values of
associated with the 28 dual mosaics, hyperplane random mosaics, the Poisson-Voronoi and Poisson-Delaunay random mosaics and found that for the total of all the 60 mosaics the range is the same (cf. in the Appendix). The indicated narrow range for the harmonic degree implies that on the
symbolic plane the points corresponding to these mosaics appear to accumulate on a narrow strip (cf. ).
Figure 1. The 28 uniform honeycombs, their duals, the hyperplane mosaics, the Poisson-Voronoi and Poisson-Delaunay mosaics, iterated foams and their duals (for details on the latter see Section 3.2) shown as black dots on the symbolic plane (left) and on the plane
where
denotes the average number of faces of a cell of the mosaic (right). For detailed numerical data see in the Appendix. Continuous curve on the left panel shows prismatic mosaics. Dotted lines represent the
and
curves, illustrating Conjecture 1. Continuous straight lines on the right panel correspond to simple and simplicial polyhedra.
![Figure 1. The 28 uniform honeycombs, their duals, the hyperplane mosaics, the Poisson-Voronoi and Poisson-Delaunay mosaics, iterated foams and their duals (for details on the latter see Section 3.2) shown as black dots on the symbolic plane [n¯,v¯] (left) and on the plane [f¯,v¯], where f¯ denotes the average number of faces of a cell of the mosaic (right). For detailed numerical data see Table A1 in the Appendix. Continuous curve on the left panel shows prismatic mosaics. Dotted lines represent the h¯=3 and h¯=4 curves, illustrating Conjecture 1. Continuous straight lines on the right panel correspond to simple and simplicial polyhedra.](/cms/asset/ada378ab-b5b3-4c2e-9d8a-63b94cf56f03/uexm_a_1691090_f0001_b.jpg)
While we can not offer a full explanation of this phenomenon, we think that the concept of the harmonic degree may help to explain its essence. In particular, we introduce
Conjecture 1.
For any normal, face-to-face mosaic in
we have
To build intuitive support for Conjecture 1 we will show in Section 3 that the interval indicated in the Conjecture has indeed some significance: we demonstrate mosaics corresponding to the lower and upper endpoints (the former understood as a limit outside the interval) and we also prove
Theorem 2.
For all , there is a normal, face-to-face mosaic
in
satisfying
Also, as a small step towards establishing the Conjecture, we prove
Proposition 1.
For any normal, face-to-face mosaic in
we have
Furthermore, if d = 3, then
We provide the general formulae governing 3 D mosaics in Section 2. Next, we prove Theorems 1 and 2 in Section 3. Section 4 discusses non-Euclidean mosaics and non-face-to-face mosaics in d = 2 and d = 3 dimensions. In Section 5 we draw conclusions.
2. General formulae defining 3D mosaics
In [Citation11], for any and for any random mosaic
in the d-dimensional Euclidean space
the quantity nij is defined as the number of j-faces of a typical i-face of
if
and as the number of j-faces containing a typical i-face of
if j > i. Relations between these quantities are described in [Citation11, Theorem 10.1.6] for the case d = 2, and in [Citation11, Theorem 10.1.7] for the case d = 3. Here we use elementary, combinatorial arguments to show that these relations hold for any convex mosaic in
Throughout this section, let be a convex, face-to-face, normal mosaic in
Then we may define
as the average number of j-faces contained in or containing a given i-face, if
or j > i, respectively. If it is clear which convex mosaic
we refer to, for brevity we may use the notation
Here we assume that the average of any nij, for all values of i and j exists.
Theorem 3.
For any convex mosaic in
satisfying the conditions in the previous paragraph, we have
(2)
(2)
where
and
Proof.
Clearly, nii = 1 for and since each face belongs to exactly two cells, and each edge has exactly two endpoints, we have
The formula
follows from applying Euler’s formula for each cell of
and observing that then the same formula holds for the average numbers of faces, edges and vertices of a cell.
Let r be sufficiently large, and let Br be the Euclidean ball, centered at the origin o and with radius o. Let and
denote the number of vertices, edges, faces and cells of
in Br, respectively.
Note that if r is sufficiently large, the sum of the numbers of edges of all faces in Br is approximately and since almost all face in Br belongs to exactly two cells in Br, and each edge of a given cell belongs to exactly two faces of the cell, we have that this quantity is approximately equal to
On the other hand, the sum of the numbers of faces the cells in Br have is approximately
More specifically, we have
which readily yields that
Note that the number of cell-vertex incidences in Br is approximately Furthermore, for any incident cell-vertex pair C, v, the number of faces that contain the vertex and is contained in the cell is equal to the number of edges with the same property. Let us denote this common number by
which then denotes the degree of the vertex v in the cell C. We compute the approximate value of the quantity
in two different ways.
On one hand, we have
where e(C) denotes the number of the edges of the cell C. On the other hand, since any face belongs to exactly two cells, we also have
More precisely, we have obtained that
which implies the expression for n02.
The value of n01 can be obtained from the application of Euler’s formula for the vertex figure at every node. Finally, the value of can be obtained from the values of the other nijs like the value of
Remark 1.
By Theorem 3, it seems that many combinatorial properties of the convex mosaic are determined by three parameters, say by v, f, n. One may try to find upper and lower bounds for these values by observing that each entry in
has a minimal value: e.g.
and
Nevertheless, solving these inequalities puts no restriction on the values of v, f, n, apart from the trivial inequalities
It is worth noting that in contrast, for convex polyhedra (or, in other words, for convex spherical 2-dimensional mosaics, cf. Remark 8), the sharp inequalities
[Citation14, Citation15] are immediate consequences of the fact that each face of the polyhedron has at least 3 vertices, and each vertex belongs to at least 3 faces.
Remark 2.
Note that if is a convex mosaic in
and a convex mosaic
is its dual, then
for all
3. Proof of the theorems
3.1. Proof of Theorem 1 and the volumes of polar domains
Proof.
First we show that in case of Euclidean mosaics (in arbitrary dimensions) the harmonic degree may be interpreted as the averaged inverse sum of two angles linked by polarity, one of which is the internal vertex angle of a cell.
Consider a convex face-to-face mosaic in
For any cell C in
and any vertex p of C, let
denote the set of unit vectors such that the rays in the direction of a vector in I(C, p) and starting at p contain points of
Furthermore, let
denote the set of outer unit normal vectors of C at p. Then, by definition, we have that E(C, p) is the polar
of I(C, p). Let us denote the spherical volumes of E(C, p) and I(C, p) by
and
respectively, and let
define the average values of
and
respectively, over all incident pairs C and p.
Note that for any cell C, the family of sets E(C, p), where p runs over the vertices of C, is clearly a spherical mosaic of and thus, the total area of the members of this family is the surface area
of the sphere. The same statement holds for the family of sets I(C, p), where C runs over the cells containing a given node p.
Now, consider a large ball B of space with radius r, and denote by Nc and Nv the numbers of cells and nodes of in B, respectively. Then, for the number k(r) of incident pairs of cells and vertices in B we have
(3)
(3)
The sums of
and
(over all pairs of cells C and incident vertices p in B) may be written as:
(4)
(4)
so, for the averages
we get
(5)
(5)
Thus, by (Equation5(5)
(5) ) we have
(6)
(6)
implying that
(7)
(7)
Remark 3.
Substituting the value of into (Equation7
(7)
(7) ), we obtain that for planar mosaics
and for mosaics in
Remark 4.
If d = 2, then at each vertex we have implying
and this, via equation (Equation7
(7)
(7) ) yields
Remark 5.
As we observed, for any node p and any cell C incident to p, we have
While the equality
does not hold in general, it does hold in case of hyperplane mosaics.
Remark 6.
Clearly, the inequalities readily imply
and by Theorem 1,
This inequality is also an immediate consequence of the well-known result of Gao, Hug and Schneider [Citation6], stating that for any spherically convex set A of a given spherical volume, the volume of its polar
is maximal if A is a spherical cap of the given spherical volume.
3.2. Proof of Theorem 2 and the range of the harmonic degree
3.2.1. Mosaics with high harmonic degree: hyperplane mosaics
If is generated by dissecting
with
-dimensional hyperplanes then it is called a hyperplane mosaic [Citation11]. An elementary computation shows that the harmonic degree of a normal mosaic, generated by hyperplanes in general position, is
(8)
(8)
These mosaics appear to have the highest harmonic degree. They are certainly not the only mosaics with though. In d = 2 dimensions all convex mosaics have
and in d = 3 dimensions we have the continuum of prismatic mosaics with
3.2.2. Mosaics with low harmonic degree: iterated foams and their duals
Here we define mosaics which appear to have extremely low harmonic degrees.
Consider a Euclidean mosaic with
as the average degree of nodes; we remark that such mosaics exist in all dimensions, we construct the dual of such a mosaic in the proof of Theorem 2. In addition, we assume that the edge lengths of the mosaic are uniformly bounded; that is there are some
such that the value of each such quantity is between a and b, and we assume the same about the angles between any two faces of
Note that since all d-dimensional convex polytopes with d + 1 vertices are simplices, the vertex figures of ‘almost all’ nodes of are simplices. Now, for each node having a simplex as a vertex figure, replace the node with its vertex figure. More precisely, if p is a node whose vertex figure is a simplex, define the cell Cp as the convex hull of the points of the edges starting at p, at the distance
from p for some fixed value of ε independent of p, and replace each cell C containing p with the closure of
Then, if this process is carried out simultaneously at all nodes p, we obtain a convex, face-to-face mosaic
which, under our condition, is normal. Applying this procedure k times we obtain the convex, face-to-face, normal mosaic
We will call the
limit of such a sequence a d-dimensional iterated foam, referring to the fact that in a physical foam in d = 2 and d = 3 dimensions we always have
Clearly, for all we have
Consider a sufficiently large region of space. Then the number of vertex-cell incident pairs in
is approximately
where Nc and Nv denote the numbers of the cells and the nodes of the mosaic in this region, respectively. An elementary computation yields that for the mosaic
this number is approximately
and the number of cells of
in this region is about
Thus, taking limit, we obtain that the average degree of a cell of
is
Setting
we similarly obtain the recursive formula
for all nonnegative integers k.
An elementary computation yields that for all
This implies that for any initial value
the sequence
converges to
and thus, the sequence
converges to
We note that the above procedure can be dualized. In this case, starting with a mosaic in which all cells are simplices, in each step we divide the cell into regions by taking the convex hulls of a given interior point of the cell with each facet of the cell. Lines 31 and of in the Appendix summarize the main parameters of these iterated mosaics.
Remark 7.
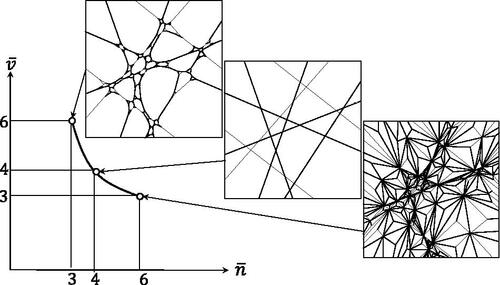
We note that for planar mosaics the iterating process (and also its dual), can be extended to any mosaic in a natural way, and after one iteration step the degree of every node (in case of its dual the degree of every cell) is equal to 3. This is illustrated in where we iterate a (finite domain of a) hyperplane mosaic for k = 2 steps in both directions.
Figure 2. Illustration of an iterated foam and its dual in d = 2 dimensions. We used the hyperplane mosaic (middle panel) as initial condition and ran k = 2 iterative steps both in the direction of iterated foams (upper panel) as well as their duals (lower panel). Note that in d = 2 dimensions these iterative steps change both and
however, the harmonic degree remains constant at
Also note that in higher dimensions hyperplane mosaics may not be used as initial conditions for these iterations. Iterated foams and their duals in d = 3 dimensions are shown in the symbolic plane on .
3.2.3. Proof of Theorem 2
Let be the standard cubic mosaic in
whose vertices are the points of the integer lattice
and note that
We define a new lattice
as the first barycentric subdivision of
In this lattice the centroid of each face of
is a vertex of
and cells correspond to flags of
where a flag is a sequence
of faces of
with
for all values of i. In this case the cell associated to the flag is the convex hull of the centroids of the Fis.
We compute the harmonic degree of Note that since every cell of
is a simplex, we have
First, observe that since any cell of
has 2d facets and by the fact the every face of a cube is a cube, choosing the faces of a flag in the order
we have that the number of flags belonging to any given cube in the mosaic is
We note that the same quantity can be obtained if we choose the faces of a flag in the opposite order. In this approach first we choose a vertex of the cell, then we extend this point to an edge parallel to a chosen coordinate axis, which then can be extended to a 2-face choosing another coordinate axis. In this way the number of flags is equal to the product of the number of vertices (
), and the number of permutations of the d coordinate axes (
).
Applying arguments similar to these two counting arguments, one may show that each i-face belongs to flags within one cell, and as each i-face belongs to
cells, the total number of flags an i-face belongs to is
Furthermore, the proportion of the i-faces compared to the number of cells is
Thus, the average degree of a node in the barycentric subdivision of the cubic lattice is
implying
(9)
(9)
where an elementary computation yields that
for all
Case 1, We construct a mosaic with harmonic degree
To do it, we use four types of layers.
A first type layer is a translate of the part of the cubic lattice between the hyperplanes and
A second type layer is the same part of the subdivided cubic lattice
For the third type, we take the translates of a partial subdivision of the cubic lattice: each cube in the strip between
and
is subdivided by the centroids of all faces apart from those in the hyperplane
The fourth type layers are the reflected copies of third type layers about the hyperplane
The building bricks of the mosaic are strips S(k, l) of width where k and l are positive integers. Here S(k, l) consisting of k first type, 1 fourth type, l second type and 1 third type layer in this consecutive order, where the layers are attached in a face-to-face way. Observe that if k and l are sufficiently large, then the harmonic degree of a strip S(k, l) is approximately
Since there is some
such that
Let
be a sequence of pairs of positive integers such that
and
We define the mosaic as follows. Consider a strip
Attach two copies of
to the two bounding hyperplanes of S1 in a face-to-face way, to obtain S2 as the union of these three strips. Then S3 is constructed by attaching two copies of
to S2 in a face-to-face way. Continuing this procedure, we obtain the mosaic
as the limit of the strip Sm, where
Then the harmonic index of
is
Case 2, Observe that in the subdivided cubic mosaic
defined above, every cell is a simplex. Thus, we may apply the dual of the algorithm discussed in Subsection 3.2.2, namely in each step we divide each cell C into d + 1 new cells by taking the convex hulls of a given interior point of C and the facets of C. Let us denote by
and
the mosaic obtained by k subsequent applications of this procedure, and its harmonic degree, respectively. Then the sequence
tends to d, and thus, there is a smallest value of k such that
is in the interval
To construct a suitable mosaic
with harmonic degree
we follow the idea of the proof in Case 1, and divide only a part of the cells of
into new cells.
3.2.4. Proof of Proposition 1
The first part of the proposition follows from the trivial estimates To prove the second part, we need a lemma. We note that the minimum number of tetrahedra such that each convex polyhedron with k vertices can be decomposed into is not known. This fact and the idea of the proof of Lemma 1 can be found in [Citation4].
Lemma 1.
Any convex polyhedron P in with v vertices can be decomposed into at most
tetrahedra.
Proof.
Let the faces of P be and let fi denote the number of edges of Gi. Then
where e is the number of edges of P.
Let p be any vertex of P. Let us triangulate each face of P containing p by the diagonals starting at p, and all other faces of P by the diagonals starting at an arbitrary vertex of the face. Then the number of all triangles is Since each face contains at least one triangle, and each vertex belongs to at least three faces, the number m of triangles in the faces not containing p is at most
Now, if these triangles are
then the tetrahedra
is a required decomposition of P.□
Consider a mosaic in
and a sufficiently large region. Let Nc and Nv denote the numbers of cells and nodes of
in this region. For any cell Ci, let vi denote the number of vertices of Ci. Then the number of cell-vertex incidences in this regions is approximately
By Lemma 1, these cells can be decomposed into at most tetrahedra. It is well known that the sum of the internal angles of any tetrahedron is greater than 0 and less than
[Citation5]. Thus, the sum of all the internal angles of the cells is at most
On the other hand, this sum is approximately equal to the product of the number of nodes and the total angle of a sphere; that is
Thus, apart from a negligible error term, we have
Taking a limit, we obtain that
implying that
Since
clearly holds, we have that
(10)
(10)
It is an elementary computation to check that if and only if
Since for any fixed value of
is minimal at the minimal value of
it follows that under the condition that
we have
Furthermore, if
then
which is minimal if
and thus,
also in this case.
4. Non-Euclidean and non face-to-face mosaics
4.1. Non-Euclidean mosaics
Mosaics, convex mosaics, and all notions described in Subsection 1.1, excluding the notions of average degrees of cells and vertices, can be defined in a natural way for spherical and hyperbolic spaces as well. For spherical space, this includes average degrees as well; because of the compactness of the space it is even possible to avoid the usual limit argument applied to compute these values in
On the other hand, defining average values in hyperbolic space seems problematic. Indeed, it is well known that under rather loose restrictions, in a packing of congruent balls in the number of balls intersecting the boundary of a hyperbolic ball B of large radius is not negligible compared to the number of balls contained in B. This phenomenon is explored in more details, for instance, in [Citation3], and can be generalized for the numbers of cells of a normal mosaic in a natural way.
A straightforward solution to this problem is to examine only regular mosaics, in which the degree of every cell, and the degree of every vertex is equal, which offers a natural definition for and
We do this in Subsection 4.1.1. To circumvent this problem in a more general way, we use the geometric interpretation of harmonic degree for mosaics in
appearing in Subsection 3.1; this interpretation, in particular, provided a different proof of the fact that harmonic degree is 2 for every planar Euclidean mosaic.
In Subsection 4.1.2 we generalize this geometric interpretation for mosaics in and
and show that for spherical mosaics it coincides with the original definition of harmonic degree. Finally, we show that this value is less than 2 for any spherical mosaic, and it is at least 2 for any hyperbolic mosaic, using any reasonable interpretation of average.
4.1.1. Non-Euclidean regular honeycombs in  for d = 2, 3
for d = 2, 3
Here we show that in d = 2 dimensions, Euclidean mosaics separate regular spherical mosaics from regular hyperbolic mosaics on the symbolic plane.
While Plato’s original idea of filling the Euclidean space with regular solids proved to be incorrect, if we relax the condition that the embedding space has no curvature then all Platonic solids may fill space by what we call a regular honeycomb. We briefly review these mosaics to show how they are represented in our notation and how their harmonic degrees are spread.
Let be a honeycomb in a space of constant curvature of dimension d. A sequence
where Fi is an i-dimensional face of
is called a flag of
(cf. the proof of Theorem 2). We say that
is regular, if for any two flags of
there is an element of the symmetry group of
that maps one of them into the other one. In particular, if
is a regular planar mosaic, then the cells of
are congruent regular p-gons, and at each node, an equal q number of edges meet at equal angles. In this case
is called the Schläfli symbol of
It is well known that up to congruence, for any values
there is a unique regular mosaic with Schläfli symbol {p, q} (cf. [Citation12]). This mosaic if spherical if p = 3 and q = 3, 4, 5 or if q = 3 and p = 3, 4, 5, Euclidean if
and hyperbolic otherwise. We note that the five regular spherical honeycombs correspond to the five Platonic polyhedra. The Schläfli symbol of a higher dimensional mosaic can be defined recursively: it is
if the Schläfli symbol of its cells are
(which must correspond to a regular spherical mosaic), and the intersection of
with any sufficiently small sphere centered at a node of
is the regular spherical mosaic
In d = 2 dimensions the curve defines a partition of the
grid on the
symbolic plane with the constraints
For a regular mosaic with Schläfli symbol
set
or equivalently,
Then an elementary computation (determining the sign of the quantity
for all integers
) shows that grid points on the
line correspond to regular Euclidean mosaics, grid points with
correspond to regular spherical mosaics and grid points with
correspond to regular hyperbolic mosaics.
In d = 3 dimensions the curve defines a partition of the
grid on the
symbolic plane in a similar sense, although here only a finite number of grid points correspond to regular mosaics. We summarize these in .
Table 1. Regular honeycombs in d = 3 dimensions.
As we can observe, the harmonic degree of a mosaic appears to carry information both on the dimension and the curvature of the embedding space:
curves separate convex mosaics embedded in spaces with the same curvature sign but different dimension and vice versa, they also separate regular mosaics embedded in spaces with the same dimension but different sign of curvature. Knowing one of those parameters seems to permit us to obtain the other, based on the mosaic’s harmonic degree.
4.1.2. Non-Euclidean general face-to-face mosaics on and
Our goal is to extend the geometric interpretation of the harmonic degree to convex face-to-face mosaics on and
First we describe how the duals of spherical mosaics can be constructed. To do this, first we compute the harmonic degree of spherical mosaics directly.
Remark 8.
Clearly, projecting a convex polyhedron P from an interior point to a sphere concentric to this point yields a spherical mosaic. Furthermore, in a spherical mosaic any two cells intersect in one edge, one vertex or they are disjoint. Using these properties it is easy to show that the edge graph of any spherical mosaic is 3-connected and planar; such an argument can be found, e.g. in the proof of [Citation1, Claim 9.4]. By a famous theorem of Steinitz [Citation15], every 3-connected planar graph is the edge graph of a convex polyhedron. Thus, up to combinatorial equivalence, we may regard a spherical mosaic as the central projection on of a convex polyhedron P containing the origin in its interior. This representation permits us to define the dual of a spherical mosaic associated to P as the mosaic associated to its polar convex polyhedron
In two dimensions, spherical mosaics may be characterized by the angle excess associated with their cells which is equal to the solid angle subtended by the cell or, alternatively, the spherical area of the cell. Let be a convex mosaic on
with Nv nodes and Nc cells. Since
is a tiling of
the average area of a cell is
Similarly, the average area of a cell in the dual mosaic is
Definition 3.
For any spherical mosaic we call the quantity
the harmonic angle excess of
Proposition 2.
The harmonic degree of any convex, face-to-face mosaic on
is
(11)
(11)
Proof
. Let Nc and Nv denote the numbers of cells and nodes of and let
and
denote the average degree of a cell and a node, respectively. Then the number of adjacent pairs of cells and nodes of
is equal to
(12)
(12)
Let αij denote the angle of the cell Ci at the vertex vj if they are adjacent, and let otherwise. We compute the sum
in two different ways. First, note that
On the other hand, the area of any cell Ci is equal to the angle sufficit of Ci, or more specifically,
where
is the number of vertices of Ci (see Subsection 1.1). Since
and
it follows that
This implies the equality
(13)
(13)
Now, (Equation11(11)
(11) ) follows from (Citation12, Citation13) and the equation
(which follows from Definition 3).□
Corollary 1.
The harmonic degree of any face-to-face convex mosaic of
is
While it does not seem feasible to extend the definition of for mosaics in
in a straightforward way, the geometric interpretation of this quantity in Subsection 4 permits us to find a variant of Corollary 1 also in this case.
Let be a convex face-to-face mosaic in any of the planes
or
Let C be a cell of
with v vertices. Let pj,
be the vertices of C, and fix an arbitrary point
Let Lj denote the sideline of C passing through the vertices pj and
and let Rj denote the ray starting at q and intersecting Lj in a right angle. The convexity of C implies that the rays
are in this cyclic order around q. Let
denote the angle of the angular region which is bounded by
and whose interior is disjoint from all the rays
Furthermore, let
denote the interior angle of C at pj. Now we define the quantity
where
is the sum of the interior angles of C.
Observe that if is a Euclidean mosaic, then the weighted average value of
with the weight equal to v, over the family of all cells of
coincides with
Next, assume that is a spherical mosaic. Let the cells of
be Ci,
and let Nv and Ne be the number of nodes and edges of the mosaic, respectively. If the degree of Ci is vi, then
and by Euler’s formula,
yielding
Furthermore, for all values of i, the area formula for spherical polygons yields that
Thus,
Since the total area of all cells is
this implies
We have shown that for face-to-face, convex mosaics on we have
(cf. (Equation11
(11)
(11) )). Thus, for these mosaics we have
extending Theorem 1 for 2-dimensional spherical mosaics.
Finally, consider the case that is a hyperbolic mosaic. Let
denote the cells of
and let vi denote the degree of Ci. As in the spherical case, by the area formula for hyperbolic polygons, we have that
for all values of i. For any nonnegative function
we may define the harmonic degree of
with respect to f as
where the inequalities
imply
Note that since any measure on a countable set is atomic, the above formula exhausts all reasonable possibilities for defining harmonic degree.
4.2. Non face-to-face mosaics on and
Conjecture 1 formulates the hypothesis that the harmonic degree of d-dimensional Euclidean face-to-face mosaics is confined to the range In the current subsection we would like to point out that in case of non face-to-face mosaics this range may be much broader. According to the convention introduced in Subsection 1.1, the degree of a node is equal to the number of vertices coinciding at that node, both for face-to-face and non face-to-face convex mosaics.
In d = 2 dimensions we already stated that for face-to-face mosaics we have [Citation11, Theorem 10.1.6], which is equivalent to
(14)
(14)
If we admit non face-to-face mosaics and we sum the internal angles over all cells and also sum the same angles as nodal angles over all nodes then (Equation14(14)
(14) ) generalizes to
(15)
(15)
where p is the proportion of the regular nodes in the family of all nodes, where we call a node regular if it is the vertex of every cell it belongs to. As we can see, in 2 dimensions convex mosaics have two free parameters and they form a compact, 2D subset of the
symbolic plane as illustrated in . By computing the harmonic degree
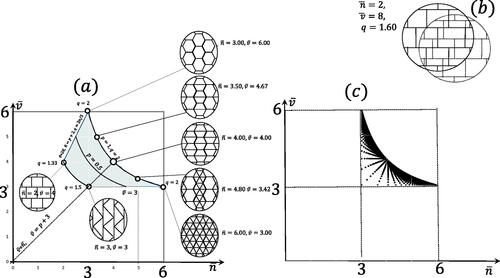
over the admissible domain marked on we find that
which indicates that non face-to-face mosaics may admit lower harmonic degrees than face-to-face mosaics. (b) shows an example of a non face-to-face mosaic in d = 3 constructed as alternated, shifted layers of a brick-wall-type planar mosaic. At every node just 2 vertices meet so we have
and each cell is a cuboid yielding
This results in a value
which is certainly below the maximal value of
for planar mosaics.
Figure 3. (a) Symbolic plane for planar mosaics. The p = 1 line corresponds to face-to-face mosaics. Gray shaded area marks the descriptors of all admissible mosaics in the plane. (b) Example of a special 3D mosaic with Solid line: odd layer, dotted line, even layer. Both layers correspond to the planar mosaic in panel (a) at
(c) Parameter plane for spherical mosaics in d = 2 dimensions. All mosaics shown with
Nc denoting the number of cells, Nv denoting the number of nodes. Mosaics on the
and
lines correspond to simple and simplicial polyhedra, respectively. Observe how mosaics accumulate on the line corresponding to face-to-face Euclidean mosaics.
Remark 9.
Using the proof of Proposition 2, the generalization of formula (Equation15(15)
(15) ) to 2D spherical mosaics is straightforward:
(16)
(16)
5. Summary
In this paper we proposed to represent mosaics in the symbolic plane of average nodal and cell degrees and we introduced the harmonic degree
constant values of which appear as curves in this space. We pointed out that these curves appear to have special significance: in d = 2 dimensions all convex, face-to-face mosaics appear as points of the h = 2 curve and a compact domain can be associated to non face-to-face mosaics. We showed that in case of 2D spherical mosaics
differs only in a constant from the suitably averaged angle excess and this explains why points associated with 2D regular mosaics on manifolds with constant curvature are separated by the
line.
The most interesting geometric interpretation of appears to be Theorem 1, stating that the harmonic degree is the inverse of the averaged sum of two angles associated with polar domains, one of which is the internal angle of a cell at a vertex of the cell. We showed that this interpretation of
remains valid for Euclidean mosaics in arbitrary dimensions as well as 2D spherical mosaics. The link established in Theorem 1 between the harmonic degree
and the average total angle
illustrates that the combinatorial and metric properties of convex mosaics are closely related. While Ω is constant in 2D (resulting in
), in 3 D there exists a broad range in which Ω may fluctuate. Nevertheless, we found that for a set of 60 mosaics (which included all uniform honeycombs as well as random mosaics) the actual fluctuation is very small and the harmonic degree of all investigated mosaics was in the range
By using a recursive algorithm we also constructed d-dimensional Euclidean mosaics which approach, as the number of recursive steps tends to infinity, the harmonic degree
We proved that
may assume any value in the interval
All the above computations and results led us to formulate Conjecture 1, stating that there exist no Euclidean, normal, face-to-face mosaics the harmonic degree of which lies outside the interval. If true, this conjecture would not only yield an interesting alternative explanation for the averaged behavior of 1D and 2D mosaics but also deepen our current understanding of 3D (and higher dimensional) honeycombs.
Acknowledgments
The authors are very grateful to Rolf Schneider for his repeated encouragement which contributed to shape this manuscript. We also thank Egon Schulte and Frank Morgan for their positive comments, and an anonymous referee for careful reading and valuable comments.
Declaration of Interest
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- Bezdek, K., Lángi, Z., Naszódi, M, Papez, P. (2007). Ball-polyhedra. Discrete Comput. Geom. 38: 201–230. doi:10.1007/s00454-007-1334-7
- Deza, M, Shtogrin, M. (2000). Uniform partitions of 3-space, their relatives and embedding. Eur. J. Combin. 21: 807–814. doi:10.1006/eujc.1999.0385
- Fejes Tóth, G, Kuperberg, W. (1993). Packing and covering with convex sets, Chapter 3.3 Handbook of Convex Geometry. Amsterdam: North-Holland, pp. 799–860.
- Fung, S. P. Y., Wang, C, Chin, F. Y. L. (2007). Approximation algorithms for some optimal 2D and 3D triangulations In: T. F. Gonzalez, ed. Handbook of Approximation Algorithms and Metaheuristics. Boca Raton, FL: Chapman& Hall/CRC.
- Gaddum, J. W. (1952). The sums of the dihedral and trihedral angles in a tetrahedron. Amer. Math. Monthly. 59: 370–371. doi:10.2307/2306805
- Gao, F., Hug, D, Schneider, R. (2003). Intrinsic volumes and polar sets in spherical space. Math. Notes. 41: 159–176.
- Grünbaum, B. (1994). Uniform tilings of 3-space. Geombinatorics. 4: 49–56.
- Johnson, N. W. (1991). Uniform polytopes. manuscript.
- Chung, P. N., Fernandez, M. A., Li, Y., Mara, M., Morgan, F., Plata, I. R., Shah, N., Vieira, L. S, Wikner, E. (2012). Isoperimetric pentagonal tilings. Notices Amer. Math. Soc. 59: 632–640. doi:10.1090/noti838
- Senechal, M. (1981). Which tetrahedra fill space? Math. Mag. 54(5): 227–243. doi:10.2307/2689983
- Schneider, R, Weil, W. (2008). Stochastic and Integral Geometry. Berlin, Germany: Springer-Verlag.
- Schulte, E. (1997). Symmetry of polytopes and polyhedral. In Handbook of Discrete and Computational Geometry. Boca Raton, FL: CRC Press Ser. Discrete Math. Appl., CRC, pp. 311–330.
- Schulte, E. (1993). Tilings, Handbook of Convex Geometry, Vol. A, B, Amsterdam: North-Holland, pp. 899–932.
- Steinitz, E. (1906). Über die Eulersche Polyderrelationen. Arch. Math. Phys. 11: 86–88.
- Steinitz, E. (1922). Polyeder und Raumeinteilungen. Enzykl. Math. Wiss. 3(Part 3AB12): 1–139. (Geometrie).
Appendix
Table A1. Harmonic degree of uniform convex honeycombs, their duals, Poisson-Voronoi, Poisson-Delaunay and Hyperplane random mosaics, iterated foams and their duals.