
ABSTRACT
PHC pile head cutting is an essential operation in foundation works, as it is needed to level the pile foundations. However, as it involves workers manually cutting the PHC pile with a grinder, the PHC pile head cutting process has several challenges with regard to safety, convenience, productivity, and quality. To address such problems, in this study, we define the core element technologies and automated work processes of an all-in-one attachment-based PHC pile head cutting robot that allow a series of operations to be performed in sequence – recognizing a cut-off line on PHC piles; cutting them; and separating, lifting, transporting, and unloading the severed top parts of the piles – without the need to involve workers onsite. Additionally, a prototype of the robot is developed and subjected to performance evaluation and productivity analysis. The results of the performance evaluation and productivity analysis of the conventional and automated methods performed using Web-CYCLONE simulations indicate that the automated method can improve the productivity by 3.13% compared with the conventional method. It is anticipated that when deployed onsite, the proposed robot can not only increase the productivity but also improve the convenience and quality of work at the PHC pile head cutting job site.
1. Introduction
Pretensioned spun high strength concrete (PHC) pile head cutting work involves a laborer cutting high-strength concrete piles of >78.5 MPa embedded in the ground using a grinder and is an essential operation in levelling pile heads of varying heights or trimming the upper parts of pile heads that are damaged during pile driving (Yeom et al. Citation2017a).
Such PHC pile head cutting work presents several challenges with regard to safety, as it is likely to lead to accidents, such as the workers being injured while using the grinder or losing their footing owing to ground water flooding. Additionally, the quality of work and productivity can vary depending on the skill level of the workers, making it difficult to manage work onsite (Yeom et al. Citation2018). Furthermore, the recent trend of using larger-diameter PHC piles has increased the complexity of the work, presenting challenges with regard to work hazards, quality, and productivity.
To address such challenges, a wide range of patented technologies and equipment have been developed to mechanize and automate the PHC file head cutting operation (Shinhan Technologies Inc Citation2009; Lee Citation2015, Citation2008, Citation2007; Daehoba Contec Inc. Citation2007; Costal Pile Cutters International LLC Citation2019; Mantovanibenne Citation2019; MOTOCUT. PILE CUTTING Citation2019; TAETSA Citation2019) . However, our analysis revealed that most of the related patented technologies and equipment introduced thus far focus solely on the function of cutting PHC piles, indicating a limitation with regard to putting them to practical use at PHC pile head cutting work sites where a series of tasks are to be performed in sequence: 1) marking a cut-off line on the PHC piles; 2) cutting them; 3) separating and pushing over severed piles; and 4) lifting them and putting them away.
Therefore, the objectives of this study were 1) to define the core technologies and automated work process of an all-in-one attachment-based PHC pile head cutting robot that allows the aforementioned PHC pile head cutting operations to be accomplished in a sequentially integrated manner without the need to involve workers onsite and 2) to conduct a performance evaluation and productivity analysis on the prototype that we developed.
The scope and methodology of the study are as follows.
1) Defining the core technologies and automated work process of the all-in-one attachment-based PHC pile head cutting robot
We analyzed the conventional PHC pile head cutting process and its problems and examined the development status of relevant patents and technology. Additionally, we identified the core technologies and operation processes of the robot and defined its automated work process.
2) Prototyping and performance evaluation of the all-in-one attachment-based PHC pile head cutting robot
According to the predefined core technologies and operation and work processes, we developed a prototype robot and evaluated the performance for each core technology of the prototype via laboratory tests.
3) Productivity analysis of the all-in-one attachment-based PHC pile head cutting robot versus the conventional method
By performing a field investigation and analysis, we examined the lead times of detailed work processes involving the conventional and automated methods and developed a model for analyzing the productivity of each method through a Web-CYCLONE simulation. Using the developed Web-CYCLONE model, we compared the productivity of the conventional method with that of the automated method.
2. Theoretical considerations
2.1. Conventional PHC pile head cutting process and problem analysis
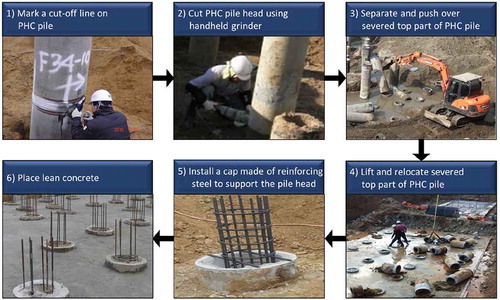
We conducted field investigations and found that the conventional PHC pile head cutting process involves the following steps: 1) mark a cut-off line on the PHC pile; 2) cut the PHC pile head using a handheld grinder; 3) separate and push over the severed top part of the PHC pile; 4) lift and relocate the severed top part of the PHC pile; 5) install a cap made of reinforcing steel to support the pile head; and 6) place lean concrete (). According to the findings of the field investigations, we categorized the problems of the conventional process into 1) safety, 2) productivity, and 3) quality-related concerns, as follows.
Figure 1. Conventional PHC pile head cutting work process.
1) Safety concerns
As PHC pile head cutting occurs before a drain is installed, the work site is often susceptible to ground water flooding. Therefore, safety accidents, such as slips, trips, falls, and electrocutions, occur at the work site ().
Figure 2. Submerged PHC pile head cutting work site.

Workers can be injured by grinder blades or fragments from the PHC pile while cutting a high-strength PHC pile manually. Additionally, when a PHC pile is lifted by a crane using a rope, it can fall if not secured tightly, resulting in serious injuries ().
Figure 3. Pile lifting using an excavator and rope.

2) Productivity concerns
The PHC pile head cutting work is characterized by its heavy dependence on the worker performing the operation, who manually cuts piles using a grinder blade. Thus, the productivity depends on the skill level of the worker. Currently, owing to the lack of skilled workers, the productivity of PHC pile head cutting work has exhibited a steady decline. Additionally, as the work requires not only workers to cut PHC piles but also substantial construction equipment, such as a crane and excavator, to separate and push over severed PHC piles and then lift them and put them away, the lack of work continuity throughout the process often reduces the productivity.
3) Quality concerns
As the quality of PHC pile head cutting heavily depends on the skill level of the worker, the lack of a skilled workforce affects the work quality. In particular, when PHC piles are separated and pushed over, if the upper part of the severed PHC pile being pushed hits a finished surface, it can damage the surface, having a great impact on the work quality ().
Figure 4. Damage to a PHC pile caused by pushing work.

2.2. Analysis of patent and technology development status for automated PHC pile head cutting equipment
We examined the current patent and technology development status regarding PHC pile head cutting equipment and analyzed its characteristics and problems.
Our analysis indicated that most of prior technologies (Shinhan Technologies Inc Citation2009; Lee Citation2007, Citation2015; Lee Citation2008; Daehoba Contec Inc. Citation2007; Costal Pile Cutters International LLC Citation2019; Mantovanibenne Citation2019; MOTOCUT. PILE CUTTING Citation2019; TAETSA Citation2019) were focused on mechanizing and automating only the PHC pile cutting operation, not allowing a series of subsequent tasks to be performed in an integrated manner, ie, marking a cut-off line on a PHC pile; cutting the pile; and separating, pushing over, lifting, and putting away the severed PHC piles. The resulting lack of work continuity causes productivity issues. Another limitation is that pile cutting work requires an operator onsite, as well as lifting equipment such as a crane. The all-in-one excavator attachment-based PHC pile head cutting robot developed in the present study was designed to allow the following series of operations to be executed in an integrated manner with a single set of equipment: marking a cut-off line on a PHC pile; cutting the pile; and separating, pushing over, lifting, and putting away the severed PHC pile tops. Thus, it is expected to enhance the work productivity and work quality compared with previously developed technologies. Additionally, we expect the robot to significantly increase the work safety by removing the operator from the work site.
2.3. Hardware development for each key function of all-in-one attachment-based PHC pile head cutting robot
The proposed all-in-one attachment-based PHC pile head cutting robot was designed and prototyped for its three major components – 1) the sensing unit, 2) the cutting unit, and 3) the handling unit – according to the key functions that it must perform.
2.3.1. Sensing unit
The sensing unit was designed to help automatically recognize where a PHC pile is to be cut during the PHC pile head cutting process. The core technologies applied are a laser level (CitationLP510, Sokkia 2019) and an optical receiver (CitationLR300; Sokkia 2019). The sensing unit () was developed such that the optical receiver detects the laser beam transmitted by the laser level and generates a beeping sound, allowing the operator to determine where to cut either by recognizing the interval between the beeps or through sensing data displayed on a small liquid-crystal display monitor mounted inside the cabin.
Figure 5. Sensing-unit hardware.

2.3.2. Cutting unit
The cutting unit was designed to automate the PHC pile cutting operation during the PHC pile head cutting process. The core technology of the cutting unit is a diamond wheel saw. The cutting unit was developed such that two grinder blades operated by a hydraulic motor make forward and rotation movements powered by a gear motor to execute the cutting operation ().
Figure 6. Cutting-unit hardware.

2.3.3. Handling unit
The handling unit was designed to automate the separation, push-over, lifting, and relocation operations of the PHC pile head cutting process. The core technology of the handling unit is a rotating grapple, and for the hardware, a hydraulic cylinder (KH001-SD80- S50), a gear pump (GP20/6.5) to operate the cylinder, and a hydraulic motor (KMH-03HK8) to run the device through the pressure generated by the hydraulic pump are used to enable the technology. The handling unit () is capable of securely grabbing a PHC pile using a hydraulic clamp-based semicircular grip or claw on both sides, preventing safety accidents involving laborers during the push-over operation and ensuring safety and stability during the cutting process.
Figure 7. Handling-unit hardware.

2.4. Defining automated process of all-in-one attachment-based PHC file head cutting robot
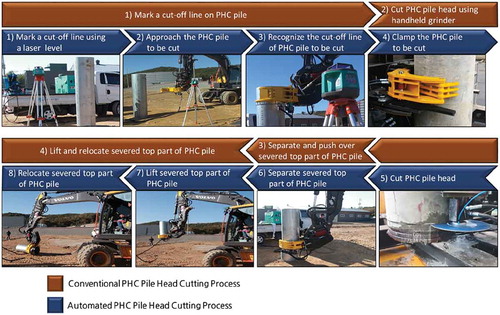
The all-in-one attachment-based PHC pile head cutting robot was developed to automate part of the conventional PHC pile head cutting process involving marking a cut-off line on PHC piles; cutting them; and separating, pushing over, lifting, and carrying away the severed top parts of the piles. The subsequent process involving cap installation to support the pile head and lean concrete placement was excluded from the automated process, as it is to be performed in the same way as in the conventional process. Therefore, in this study, we defined the automated process of the all-in-one attachment-based PHC pile head cutting robot as shown in .
Figure 8. Automated process of the PHC pile head cutting robot.
2.5. Prototyping and field testing of all-in-one attachment-based PHC pile head cutting robot
We developed a prototype of the all-in-one PHC pile head cutting robot, as shown in , by combining the hardware of the sensing unit, cutting unit, and handling unit illustrated in Section 2.3. The prototype is applicable to an 0.2–0.6-m3 excavator as an attachment and is capable of recognizing a cut-off line on a PHC pile using its sensing unit, completing the cutting operation with its cutting unit, and freely handling (separation, push-over, lift, relocation, etc.) the severed top part of the pile with its handling unit.
Figure 9. Prototype of the all-in-one attachment-based PHC pile head cutting robot.

As illustrated in , we performed field tests on the developed prototype. The objectives of the tests were to gather data for analyzing the productivity of the automated method and to evaluate the performance of the key functional components, ie, the sensing unit, cutting unit, and handling unit.
Figure 10. Field test of the PHC pile head cutting robot prototype.

3. Performance evaluation for key units of all-in-one PHC pile head cutting robot prototype
3.1. Performance test for key units of all-in-one PHC pile head cutting robot prototype
3.1.1. Test results for sensing unit
We evaluated the sensing unit with regard to the 1) recognition accuracy, 2) maximum detection sensitivity, and 3) sensing time. The results of >30 tests of the sensing unit () indicated that the average recognition accuracy of the sensing module was 1.20 mm in the case of high precision and 3.39 mm in the case of standard precision, and the average maximum detection sensitivity was 57.35 mm. Additionally, in recognition testing, where a 0.6 m3 excavator was used, the average time taken for the sensing unit to recognize where to cut was 8.0 s.
Figure 11. Sensing-unit test.

3.1.2. Test results for cutting unit
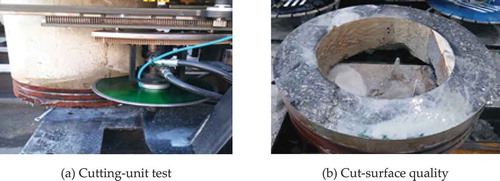
The cutting unit was evaluated with regard to the 1) base-frame movement time, 2) wheel-saw rotation time, 3) cutting time, and 4) cut-surface quality. The results of >30 tests of the cutting unit ()) indicated that the average speed at which the base frame was attached to the bottom of a claw-type clamp was 10 mm/s and that the wheel saw attached to the lower part of the base frame was able to rotate 2° per second. The average time taken to cut each PHC pile (with a diameter of 600 mm) was 210 s (3 min and 35 s), with a discharge flow rate of 34.4 cc/rev and a rotational speed of 500 rpm for the wheel saw. Additionally, the analysis indicated that executing the PHC pile cutting work according to the aforementioned specifications can ensure that the quality of the cut surface is far superior to that achieved via the conventional method ()).
Figure 12. Cutting-unit test.
3.1.3. Test results for handling unit
The handling unit was evaluated with regard to the 1) grasp stability and 2) excavator rotation/travel time. The test results () indicated that more than six contact points were identified for a 600 mm-diameter PHC pile, as initially intended in the design of the robot, allowing the pile to be held securely. Additionally, the excavator travel time on the job site was found to be 0.18 and 0.36 s/m when it operated at speeds of 20 and 10 km/h, respectively, and the time taken for the excavator to rotate 90° was 3 s.
Figure 13. Handling-unit test.

presents the test results for the key units of the all-in-one PHC pile head cutting robot prototype.
Table 1. Test results for each key unit.
The results of the performance evaluation for the key units indicated that the recognition accuracy of the sensing unit was <3.39 mm, which is sufficient to satisfy the requirements for accurately recognizing a cut-off line on a PHC pile at the job site. Additionally, the maximum detection sensitivity was 57.35 mm on average, at which an excavator operator can easily recognize where to cut and manipulate the machine accordingly. The average time taken for the cutting unit to cut a PHC pile was 3 min and 35 s, which is longer than the time taken in the conventional method. Thus, a productivity analysis is needed to determine whether the cutting time is feasible. Finally, the PHC pile holding stability of the handling unit was outstanding, which we expect to be maintained even in a rough environment where manipulating the excavator is challenging.
4. Analysis of productivity of all-in-one attachment-based PHC pile head cutting robot
4.1. Analysis of detailed conventional and automated PHC pile head cutting work processes
We conducted field investigations at four PHC pile cutting sites to investigate the detailed process of the conventional PHC pile head cutting work and found that once PHC files are cut off, they are loaded into a dump truck within the excavator work zone and then moved to a designated location for unloading. For building a Web-CYCLONE model (Seo, Kim, and Han Citation2015), we divided the conventional and automated PHC pile head cutting work processes illustrated in and into detailed work processes, as shown in .
Table 2. Analysis of conventional and automated PHC pile head cutting processes.
Analysis of the conventional and automated PHC pile head cutting work processes revealed that some of the detailed work processes, such as “Set up the survey equipment,” “Set the benchmark and mark the reference PHC pile,” and “Set up a laser level” are executed in the same manner for both methods. Therefore, the detailed work processes used in this study for productivity analysis to build Web-CYCLONE models for the conventional and automated methods were limited to “Mark a cutting line on each PHC pile” through “Dump truck returns” for the conventional method and “Deploy the robot, excavator, and operator” through “Dump truck returns” for the automated method.
4.2. Overview of work site for productivity analysis of conventional and automated methods
Of the four pile cutting work sites examined for data collection for the conventional PHC pile head cutting process, we selected one to analyze the productivity of the conventional and automated methods. The site was a construction project site for building a flat-type apartment complex consisting of six buildings, including steel-frame-enhanced concrete structure apartment buildings (2 basement levels, 23 levels above ground) and ancillary facilities.
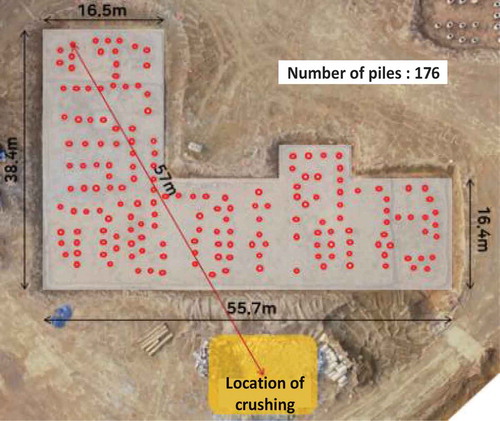
Of the six apartment buildings under construction at the selected site, one was chosen for the productivity analysis. For the chosen building to be constructed, 176 PHC piles of 600 mm in diameter were required. Once they were cut, the severed top parts of the PHC piles were moved to a designated area to be crushed, and the debris was split into reinforcing bars and concrete to be discarded separately ().
Figure 14. Overview of the work site for productivity analysis of the conventional and automated methods.
4.3. Productivity analysis of conventional PHC pile head cutting process
In this study, four pile head cutting job sites were investigated to analyze the productivity of the conventional PHC pile head cutting process. The duration of each work process was measured. Prior to the development of the Web-CYCLONE model, the box-plot method was implemented using IBM SPSS Statistics 18.0 (Pallant Citation2013) (a statistical analysis tool) to analyze the time data. There were two outliers in survey work data: 9 in the pushing work data and 1 in the lifting work data. After the outliers were eliminated, a one-sample t-test was performed with a confidence interval of 95% (α = 0.05), which revealed that the p-value was lower than the significance level for all the time data for each work process. Thus, the data collected were reliable. The time data for the conventional PHC pile head cutting process that were applied to the Web-CYCLONE model according to the foregoing analysis are presented in .
Table 3. Conventional PHC pile head cutting work time data.
According to the conventional PHC pile head cutting work process described in , we developed a Web-CYCLONE model for analyzing the productivity of the conventional method, as shown in , by taking into account work preparation times, possible delays, and resources (176 PHC piles, 1 concrete worker, 1 grinder, 1 excavator, and 1 dump truck).
Figure 15. Web-CYCLONE model for productivity analysis of the conventional method.
The productivity analysis conducted using the Web-CYCLONE model indicated that the total work time for cutting 176 PHC piles was 46,141 s (~12.8 h), and the average time taken for cutting one PHC pile was 262 s (~4.4 min) ().
Table 4. Web-CYCLONE results for the conventional PHC pile head cutting method.
4.4. Productivity analysis of automated PHC pile head cutting process
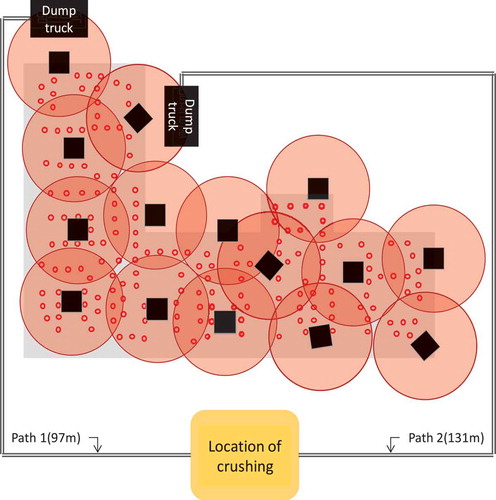
For the productivity analysis of the automated PHC pile head cutting process (Yeom et al. Citation2017b), the working scope (operating radius) of the automated robot was set as 7 m (Yeom et al. Citation2016) considering the specifications and stability of the excavator used, and given the characteristics of the target job site, the working scope was divided into 15 zones ().
The average number of piles that can be worked on per zone was identified as 11.73, and analysis of the transport route of the dump truck based on the zoning results indicated that the longest traveling route was 131 m long. In most scenarios, dump trucks at the job site cannot take the shortest route, owing to interference due to work, construction equipment, open-air materials, etc. Thus, with the transport distance used for the productivity analysis set as 131 m (the longest transport route), the travel time was calculated to be 24 s (for a speed of 20 km/h).
Figure 16. Working-scope zoning for the target building.
According to the work process of the all-in-one attachment-based PHC pile head cutting robot described in , we developed a Web-CYCLONE model for analyzing the productivity of the automated method, as shown in , by taking into account the work duration and resources (176 PHC piles, 1 excavator, and 1 dump truck).
Figure 17. Web-CYCLONE model for the automated PHC pile head cutting process.
The productivity analysis conducted using the Web-CYCLONE model indicated that the total work time required for 176 PHC piles was 44,764 s (~12.4 h), and the average time spent on one PHC pile was 254 s (~4.2 min) ().
Table 5. Web-CYCLONE results for the automated PHC pile head cutting method.
4.5. Comparative productivity analysis of conventional and automated methods
The productivity of the conventional method was compared with that of the automated method according to the developed Web-CYCLONE models. The work durations for the conventional and automated methods at the target job site were 46.141 and 44.746 s, respectively. The time required for handling one PHC pile was 262 and 254 s for the conventional and automated methods, respectively ().
Table 6. Web-CYCLONE results for the conventional and automated PHC pile head cutting methods.
According to the results, the productivity of the conventional and automated methods was 13.74 and 14.17 piles/h, respectively, indicating that the automated method was approximately 3.13% more productive than the conventional method.
5. Conclusions
A prototype of an all-in-one attachment-based PHC pile head cutting robot was developed. The robot addresses key problems of the conventional pile head cutting method with regard to safety, productivity, and quality. By performing field investigations and using the Web-CYCLONE methodology, the productivity was compared between the conventional and automated methods. According to the results, the following conclusions are drawn.
The field investigations indicated that the conventional PHC pile head cutting process presents challenges with regard to safety, productivity, and quality. Prior technologies and equipment for addressing such problems have a limited focus on the task of cutting PHC piles for mechanization/automation; thus, productivity issues remain owing to the lack of work continuity.
To address the limitations of prior technologies and equipment, we decided that the newly developed robot would consist of a sensing unit, cutting unit, and handling unit, according to its key functions, and selected relevant core element technologies and developed hardware for each unit. Additionally, we developed a prototype of the all-in-one PHC pile head cutting robot by combining the three key units and defined the automated work process that the robot would perform.
Performance evaluations of the key units of the prototype revealed the following. The sensing unit had an average recognition accuracy of <3.39 mm, satisfying the requirements at the job site. The cutting unit had an average PHC pile cutting time of 3 min and 35 s, which is longer than the time taken in the conventional method. The handling unit exhibited excellent performance with regard to securely grabbing a PHC pile, indicating that it is highly applicable at an actual job site.
The productivity was compared between the conventional and automated methods using Web-CYCLONE simulations. At the target site (1300 m3 in size, 176 PHC piles to be cut), the total time taken by the conventional method was 46,237 s, while that for the automated method was 44,770 s. Thus, the productivity of the automated method was approximately 3.13% higher than that of the conventional method.
It is anticipated that the proposed all-in-one attachment-based PHC pile head cutting robot will address some of the challenges that the conventional pile cutting method faces and substantially improve the productivity, with benefits regarding work safety, convenience, and quality consistency. With further research for reducing the PHC pile cutting time of the robot, we expect that the proposed all-in-one PHC pile head cutting robot will become even more applicable at actual job sites.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
Notes on contributors
Dong-Jun Yeom
Dong-Jun Yeom, who earned his Ph.D. in Construction Management in Department of Architectural Engineering in 2018 from Inha University. He has given a series of lectures on computer aided design, computer programming for engineering application, construction information technologies and etc. at Inha University since 2015. He currently serves as a postdoctoral research engineer in Industrial Science and Technology Research Institute at Inha University ([email protected]).
Yesul Park
Yesul Park earned her master in Construction Management in Department of Architectural Engineering in 2019 from Inha University. She currently works at SAMOO CM ([email protected]).
Young-Suk Kim
Young-Suk Kim earned his Ph.D. in Construction Engineering and Project Management in 1997 from the University of Texas at Austin. He has given a series of lectures on an execution of building work, construction management, time management, cost management, contract management, construction information technology, and automation in construction and etc. at Inha University since 1999. He currently serves as a professor in Department of Architectural Engineering at Inha University and a chairman of University Development Commission at Korea Institute of Construction Engineering and Management. His research interests are in the areas of sustainable construction, cost and time management, engineering education, and automation in construction. He has conducted various research projects in terms of automation in construction: an Automated Pavement Crack Sealing Machine, Tele-operated Concrete Pipe Laying Manipulator in the Trenches, Automated Controller for Checking Verticality and Automated, an Intelligent Excavating System, and etc ([email protected]).
Jung-Yeol Kim
Jung-Yeol Kim earned his Ph.D. in Construction Engineering and Project Management from the University of Texas at Austin. He worked for the Korea Institute of Civil Engineering and Building Technology for 16 years and performed various research projects on BIM, sensor and sensor network, construction information technology, automation and robotics in construction area funded by the Korean government and major construction and equipment companies. Dr. Kim currently serves as an assistant professor in the Department of Architectural Engineering at Inha University since 2016. He gives a series of lectures on project control, estimation, cost management, BIM, data mining, construction information technologies. His research interests are in the areas of project performance assessment, productivity improvement, cost and time management, sensor-based monitoring, BIM, construction object recognition and tracking, AR/VR in construction, and various applications of information technologies and automation in construction ([email protected]).
References
- Costal Pile Cutters International LLC. “Equipment Package.” Accessed 12 August 2019. http://www.coastalpilecutters.com/equip-list-video.html
- Daehoba Contec Inc. 2007. “A Pile or Both Concrete Column and Rod Etc.” KR patent 10-0714433, filed April 26. doi: 10.8080/1020050135674.
- Lee, C. 2007. “Head Cutting Device for Concrete Pile.” KR patent 10-0760869, filed September 17. doi: 10.8080/1020060111483.
- Lee, J. 2008. “Head Cutting Device for Concrete Pile.” KR patent 10-0813595, filed March 07. doi: 10.8080/1020070069064.
- Lee, J. 2015. “The Concrete Pipe Pile Cutting Device for a Construction Foundation Work.” KR patent 10-2015-0034341, filed August 17. doi: 10.8080/1020130114278.
- Mantovanibenne. “Portfolio, Piles and Foundations, Pile Breaker PB.” Accessed 12 August 2019. https://www.mantovanibenne.com/attrezzature/pb- scapitozzatore/
- MOTOCUT. “PILE CUTTING.” Accessed 12 August 2019. https://www.motocut.fi/en/products/concrete-pile-cutting/
- Pallant, J. 2013. SPSS Survival Manual. 4th ed. UK: Open University Press.
- Seo, W., Y. Kim, and S. Han. 2015. “A Study on the Calculation of Man Power Required for Noise-reduced Aluminum Form Construction Using Simulation Technique.” Journal of the Architectural Institute of Korea Structure & Construction 31 (4): 127–136. doi:10.5659/JAIK_SC.2015.31.4.127.
- Shinhan Technologies Inc. 2009. “Cutting Device for Concrete Pile.” KR patent 10-2009-0117439, filed November 12. doi: 10.8080/1020080043484.
- Sokka. “LP510.” Accessed August 12 2019a. https://www.sokkia.co.kr/default/1004web/bb/b08.php?com_board_basic=read_form&com_board_idx=11&&com_board_search_code=&com_board_search_value1=&com_board_search_value2=&com_board_page=&&com_board_id=11&&com_board_id=11
- Sokka. “LR300.” Accessed 12 August 2019b. https://www.sokkia.co.kr/default/1004web/bb/b08.php?com_board_basic=read_form&com_board_idx=11&&com_board_search_code=&com_board_search_value1=&com_board_search_value2=&com_board_page=&&com_board_id=11&&com_board_id=11
- TAETSA. “Pilebreakers for Square Piles.” Accessed 12 August 2019. http://www.pilebreaker.com/pilebreakers-for-square-piles
- Yeom, D., E. NA, M. Lee, Y. Kim, and C. Cho. 2017a. “Performance Evaluation and Life Cycle Cost Analysis Model of a Gondola-Type Exterior Wall Painting Robot.” Sustainability 9 (10): 1809–1826. doi:10.3390/su9101809.
- Yeom, D., J. Hwang, Y. Park, and Y. Kim. 2018. “Detail Design and Structural Stability Analysis for Automated PHC Pile Cutting Machine.” Journal of the Architectural Institute of Korea 19 (2): 117–125. doi:10.6106/KJCEM.2018.19.2.117.
- Yeom, D., J. Seo, H. Yeom, H. Yoo, and Y. Kim. 2016. “The Development of around View Monitoring System Pilot Type for Construction Equipment.” Korea Institute of Construction Engineering and Management 17 (3): 143–155. doi:10.6106/KJCEM.2016.17.3.143.
- Yeom, D., J. Seo, J. Choi, and Y. Kim. 2017b. “A Conceptual Design for Automated PHC Pile Cutting Machine.” Journal of the Architectural Institute of Korea 33 (5): 55–62. doi:10.5659/JAIK_SC.2017.33.5.55.