
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Cleaning the facade of high-rise buildings is a dangerous task that may cause workplace accidents, such as falls and collisions with the façade. Various technologies and devices have been conceived to address this problem, including a façade cleaning robot guided by built-in rails which was developed in South Korea. In this study, a life cycle cost (LCC) analysis was performed to verify the applicability and commercial feasibility of the robot in question. The LCC analysis results showed that the benefit/cost ratio, rate of return, and annual reduction in façade cleaning costs for the automated method were 1.97, 7.19%, and 49.21%, respectively. Thus, the developed robot was confirmed to provide high economic efficiency for high-rise buildings. In addition, a sensitivity analysis of the results to changes in the values of the main input variables was conducted to verify the reliability of the LCC analysis. The results of this study indicated that commercial application of the robot in consideration should improve the safety of façade cleaning work and have very positive economic, industrial, and societal effects.
1. Introduction
Buildings with curtain walls as exterior finishing require them to be regularly cleaned for maintenance (Lee, J.G and Lee, D.J Citation2012). A survey has shown that such maintenance work is currently performed by workers aboard a gondola or using suspended scaffolding hanging from ropes connected to the roof. These methods may cause workplace accidents, such as falls and collisions with the façade (Seo et al. Citation2019; Nansai et al. Citation2017; Kim et al.). Particularly for high-rise buildings, accidents caused by gusts of wind have led to worker deaths at an alarmingly increasing rate (Moon et al. Citation2015). In recent years, researchers have recognized the risks involved with cleaning the façade of high-rise buildings and have conceived various technologies and devices to mitigate such risks (Nansai and Mohan Citation2016). In South Korea, a façade cleaning robot guided by built-in rails was developed and is being field-tested to reduce the risks and improve work productivity and quality (Lee et al. Citation2018; Moon et al. Citation2015, Citation2012). To ensure the commercial feasibility and applicability of the developed robot, a life cycle cost (LCC) analysis is required that considers actual working conditions (Zhao, Wu, and Liu Citation2021; Hu et al. Citation2021). In particular, a methodology is needed that allows major decision-makers, including the building owner, to analyze the convenience of including the developed robot from the planning stage. Several studies have conducted LCC analyses to assess the practical and sustainable use of different automation technologies in the construction industry (Zhao, Wu, and Liu Citation2021; Hu et al. Citation2021; Weng et al. Citation2020; Han et al. Citation2020; Yeom et al. Citation2017; Zwicker et al. Citation2016). Although the LCC analysis methodologies used in these studies do not differ significantly from one another, they are not readily applicable to the LCC analysis of the developed robot. Therefore, an LCC analysis model that conforms to the specific features of the robot, its operation procedures and the characteristics of the target working environment, needs to be devised.
In this study, an LCC analysis model was proposed for evaluating the economic feasibility and applicability of the developed robot for high-rise buildings. In the model, the economic efficiency of automation is compared with that of conventional methods through case application and sensitivity analysis. The proposed analysis model is expected to serve as a reliable evaluation tool and a basic framework for objectively testing the feasibility of incorporating the developed robot into a building. Applying the developed robot to cleaning the exterior walls of high-rise buildings is expected to have very positive economic, industrial, and societal effects.
2. Theoretical background
2.1. Conventional façade cleaning method
For general business facilities, building owners regularly clean the façade for the comfort of the building occupants and the aesthetical improvement of the residential environment. Interviews with building owners, building facility management companies, and companies specializing in exterior cleaning indicated that exterior surfaces need to be cleaned once or twice a year, and more frequent cleaning is performed for important buildings such as corporate and major government offices. As shown in , building exteriors are conventionally cleaned by workers aboard a gondola or using suspended scaffolding while hanging on ropes.
Figure 1. Conventional methods for high-rise building exterior cleaning.
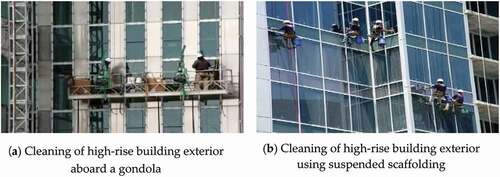
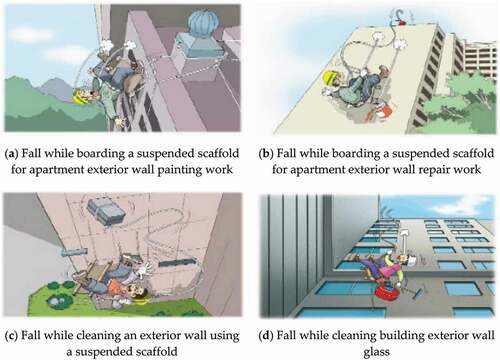
While gondolas tend to be safer than suspended scaffolding, both pose a high risk of accidents, such as falls or collisions with the outer wall owing to gusts of wind. Moreover, there is a high risk of safety accidents, such as falling objects hitting pedestrians passing by below. In particular, the severity of an accident would be very high if it occurs when exterior cleaning work is performed after the safety structures (safety net, flared shield in, etc.) have been removed (Yeom et al. Citation2017). shows the representative disaster cases related to work on exterior walls as suggested by the Korea Occupational Safety & Health Agency (KOSHA), which has been continuously making efforts to promote safety awareness by publishing educational material to prevent such cases. More effective measures to prevent safety accidents are urgently required.
Figure 2. Representative disaster cases related to work on exterior walls suggested by KOSHA (Korea Occupational Safety & Health Agency Citation2019).
2.2. Cases of façade cleaning robots
Some automated exterior wall cleaning robots are being developed to solve the safety problems of the conventional method described in Section 2.1. The automated robots have the advantage that they solve these safety problems by eliminating the need of manual labor, while simultaneously ensuring better work productivity and economy than the conventional method. However, automated robots have a high initial cost, and some of them have a limitation that they must be incorporated from the beginning of the building plan. In addition, automated robots are only compatible with certain building shapes, and their cleaning quality is slightly lower than that of the conventional method.
presents a list of automated façade cleaning robots that are currently being used or have recently been developed. These automated robots can be mainly divided into two types, depending on the support mechanism used: wire-suspended (Akinfiev, Armada, and Nabulsi Citation2009; Balaguer and Abderrahim Citation2008; Qian et al. Citation2006; Hamburg University Citation2001; Fraunhofer Citation2021; Manntech Citation2021; IPC Eagle Citation2021; Gambao and Hernando Citation2006; Yoo et al. Citation2019; Kim et al. Citation2017) and rail-guided (Sugiyama Citation1998; Yokota, Nishiyama, and Takasaki Citation1987).
Table 1. Cleaning robots developed worldwide.
Wire suspended automated robots are economical, relatively easy to set up, and can be applied to various building types. However, this type of devices is more prone to safety accidents, such as collisions with exterior walls, due to high wind pressure and gusts generated by high-rise buildings. Meanwhile, rail-guided type automated robots have the advantage of being more stable and less affected by the environment under the expected working conditions. Nonetheless, they involve higher initial investment costs for the installation of the guide rails and require high technology owing to the compatibility of two vertical/horizontal robots.
○: possible, Δ: partially possible, ×: impossible
2.3. Development of façade cleaning robot guided by built-in rails
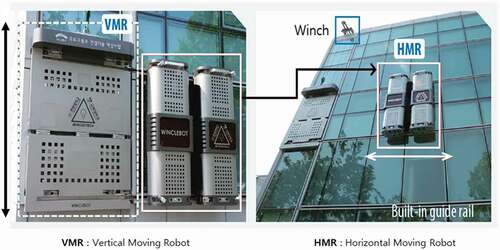
The robot considered in this study can be installed in high-rise buildings during construction or reconstruction (remodeling). As shown in , the major components of the robot include a winch-system vertical moving robot (VMR), a horizontal moving robot (HMR), a handheld operator (HHO), and a user-interface-based local commander (LC). The detailed descriptions of the components are presented below.
Figure 3. Components of the evaluated robot.
2.3.1. Vertical moving robot
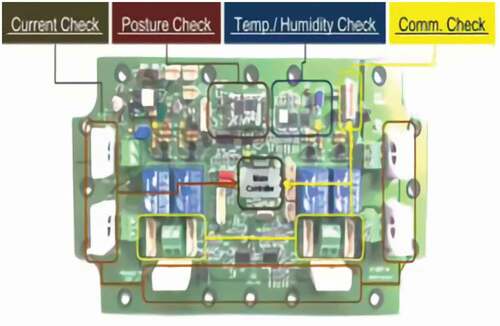
The VMR utilizes a winch installed in the upper part of a building that enables the developed robot to move vertically along a rail. Another important function of the VMR is serving as a gateway for communication and control. The highest-level controller, which is responsible for communication, control, and sensing (), is installed here to control and monitor the robot. Like many other exterior wall maintenance robots, the VMR uses a conventional wire system, but enhanced with a wheel system that comprises auxiliary and main wheels to maintain contact with the building. In addition, a vibration reduction control algorithm is applied to the wire winch system of the VMR to maintain driving stability even at a reference movement speed of 3.6 m/min (Han Citation2015).
Figure 4. Components of the VMR (Han Citation2015).
2.3.2. Horizontal moving robot
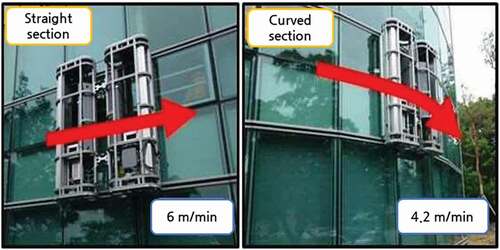
The HMR is responsible for the actual cleaning of the building exterior. It is equipped with a cleaning tool and various sensors, and it cleans the façade while moving horizontally along guide rails. shows the major components of the HMR. Apart from cleaning the façade, the system’s functions also include providing the horizontal movement to the robot, serving as a sensor gateway for monitoring the cleaning tool and work environment, cleaning the guide rail interior, and monitoring the guide rail and curtain wall. The driving mechanism of the HMR consists of a wheel system comprising auxiliary and main wheels, waterproof motors, and encoders directly connected to the wheels. The wheel system is designed to prevent the robot from deviating from the building guide rail while supporting the loads. The motors that rotate the upper main wheels can respond to changes in the external environment because they meet the IP 68 waterproof rating. The positional information of the HMR is measured with encoders connected to the lower main wheels. As shown in , the HMR can travel at a reference speed of 6 m/min in a straight section and 4.2 m/min in a curved section. Its excellent driving stability has been verified in several experiments (Han Citation2015).
Figure 5. Components of the HMR (Han Citation2015).
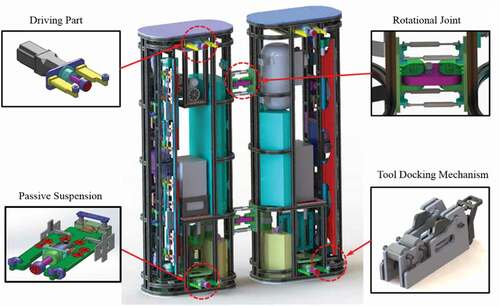
Figure 6. Driving performance of the HMR (Han Citation2015).
2.3.3. Handheld operator
As shown in , the HHO is a device that allows wired and wireless (RF type) remote control of the robot in the event of wireless communication failure. The HHO was designed to prevent safety accidents in the case of a system error by allowing emergency remote manipulation and control.
Figure 7. HHO of the HMR (Han Citation2015).
2.3.4. Local commander
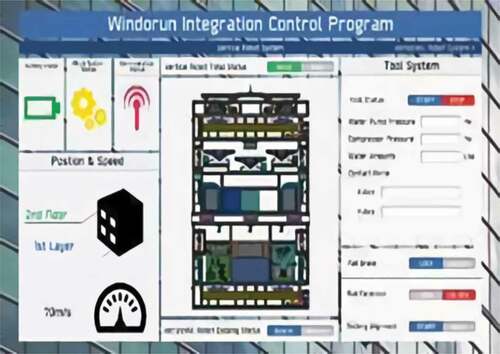
As shown in , the LC is a system that allows workers to remotely control the robot and ensure active fail-safe response by finding abnormal conditions during operation.
Figure 8. LC of the HMR (Han Citation2015).
2.3.5. Robot operation
shows the different steps involved in the operation of the robot. The robot is operated by a building manager. Once its operation is started, it automatically cleans along the predefined path without additional manipulation.
Figure 9. Automated operation of the robot.

3. Formulation of the Life Cycle Cost Analysis Model for the façade cleaning robot guided by built-in rails
As a first step for the LCC analysis of the automated high-rise building exterior cleaning system herein considered (Yeom and Kim Citation2014), direct and phone interviews were conducted with five companies specializing in exterior wall cleaning and facility management (FM) to determine the annual frequency, required personnel, and cost of the conventional cleaning methods. The interview results showed that building owners determine the cleaning cycles of their buildings. Exterior walls are generally cleaned twice a year in the case of public institutions and conglomerate headquarters and once a year in the case of other private high-rise buildings. The daily labor cost for exterior cleaning is 150–500 USD per worker, with actual wages depending on the worker’s skill level. In this study, the LCC analysis of the robot was performed under the conservative assumption of one cleaning per year, and an analysis of the sensitivity of the results to the number of cleanings per year was then conducted.
3.1. Setting the scope of the life cycle cost analysis
3.1.1. Specifications and initial investment cost of the façade cleaning robot guided by built-in rails
The hardware of the robot consists of a vertical moving module, a horizontal moving module, a wire winch system, and a cleaning tool, in addition to the guide rails. The performance and specifications of the robot are presented in . According to the manufacturer, one robot costs 106,250 USD.
Table 2. Performance and specifications of the hardware of the developed robot.
3.1.2. Annual cost of the conventional cleaning method
An order for cleaning the exterior walls of a high-rise building is placed after the owner or facility management (FM) requests quotes from companies specializing in exterior cleaning. In South Korea, the cost is calculated per unit labor or unit area. The survey results showed that lump-sum contracts are mainly used to pay the cleaning costs of high-rise buildings because extra charges owing to height and complexity differ by company, and there is no standardized quotation method. The economic efficiencies of conventional and automated methods were compared for the target building (see Section 4) based on the actual quotes from companies specializing in exterior wall cleaning.
3.1.3. Costs of the installation of guide rails for the operation of the cleaning robot
In this study, the guide rail installation cost for operating the robot was calculated based on the actual quote from a company that manufactures and installs the guide rails(). According to this manufacturer, installing the guide rail to the target building increases the cost of one curtain wall unit (1.5 m × 3.5 m) by approximately 25.6%. Therefore, the cost difference between the curtain wall with the guide rail and the conventional curtain wall was used in the LCC analysis model as the guide rail installation cost for the target building.
Table 3. Costs of main components of a conventional curtain wall.
Table 4. Costs of main components of a curtain wall with guide rails.
3.1.4. Service life and maintenance cost of the cleaning robot
The service life of the target building and guide rail system was set to 40 years based on the Enforcement Decree of the Corporate Tax Act in South Korea. The service life of the robot should also reach 40 years with regular maintenance and replacement of main components, but it was set to 20 years for a conservative analysis. Thus, the robot was assumed to be replaced once within the service life of the building. For the LCC analysis model, the maintenance cost of the robot was calculated according to the replacement and inspection costs of components with a service life of less than 10 years.
3.2. Development of the life cycle cost analysis model for the façade cleaning robot guided by built-in rails
The LCC analysis of the robot herein considered was performed in the following order: analysis of the target building settings and restrictions, analysis of the cash flows (i.e., net present value and equivalent annual worth methods), and sensitivity analysis. shows the detailed components of each process in the LCC analysis model.
Figure 10. LCC analysis model for the robot.
4. Case study application of the life cycle cost analysis method formulated for the façade cleaning robot guided by built-in rails
4.1. Overview of the target building
The LCC analysis of the automated method was based on the assumption that the owner of the high-rise building operates the developed robot for 40 years. As presented in , a 66-story high-rise mixed-use building with curtain walls located in Seoul, South Korea, was selected as the target building. The actual quote for a once-per-year exterior wall cleaning of the target building received from a company specializing in the subject was 64,500 USD, which was used for the LCC analysis of the conventional method. For the automated method, the LCC analysis was performed using the difference in installation costs between a conventional curtain wall and a curtain wall with guide rails (695,371.48 USD), the initial cost of purchasing the cleaning robot (106,250 USD), and the maintenance cost of the robot (see ).
Table 5. Maintenance cost of the robot.
Table 6. Target building used in the LCC analysis.
4.2. Discount rate for the life cycle cost analysis
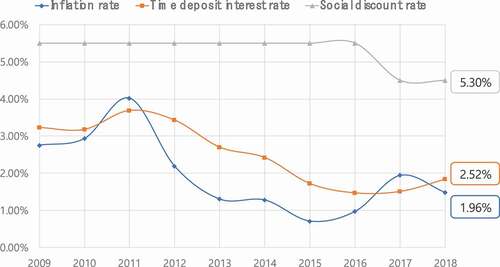
Financial data from the last 10 years, including inflation rate, time deposit interest rate, and social discount rate (Economic Statistics System Citation2019a, Citation2019b; National Law Information Center Citation2019), was incorporated to improve the reliability of the LCC analysis results for the cleaning robot (). . A social discount rate is generally applied in LCC analysis, but an average inflation rate of 1.96% was applied as a discount rate in this study aiming for a more conservative analysis. Considering the ranges of the time deposit interest rate and social discount rate for the last 10 years, a sensitivity analysis was also performed on the discount rate in the range of 0–5.5%.
Figure 11. Changes in financial data over the last 10 years.
4.3. Results of the cycle cost analysis of the cleaning robot
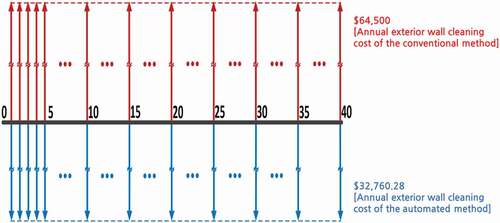
4.3.1. Cash flow diagram for the life cycle
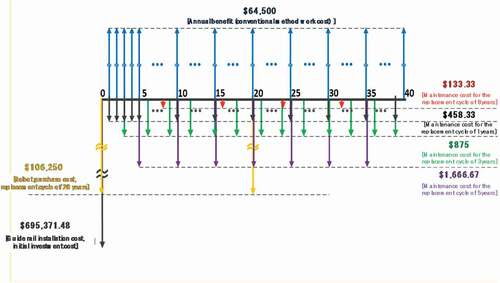
As explained in Section 3, prior to the LCC analysis of the cleaning robot, the annual labor cost of the conventional method, the guide rail installation cost for the operation of the automated method, and the robot purchase and maintenance costs were calculated considering the variables and restrictions set above. shows the resulting cash flow diagram.
Figure 12. Cash flow diagram for the conventional and automated methods.
4.3.2. Present value, benefit/cost ratio, rate of return, and breakeven point
(1) Net present value
The net present value (NPV) method compares the cash flows of the conventional and automated methods by summing the involved benefits and costs discounted at their present value, as presented in Equationequation (1)(1)
(1) . The present value of the net profit derived from the incorporation of the cleaning robot was analyzed for 40 years of operation, i.e., the service life of the target building. The results indicated that the robot produced a benefit of 874,377.35 USD in present value. This confirmed the excellent economic efficiency of the automated method compared to the conventional method.
(2) Benefit/cost ratio
The B/C ratio determines economic profitability by comparing the present value of the generated benefit to that of the generated cost. A B/C ratio greater than 1 means that the generated benefit is greater than the generated cost. As presented in Equationequation (2)(2)
(2) , the B/C ratio of the developed robot was found to be 1.97, which demonstrates its economic efficiency.
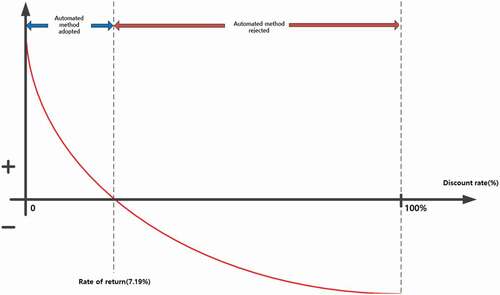
(3) Rate of return
The rate of return (return on investment) analyzes economic efficiency by computing the rate of return that makes the NPV of an investment equal to zero. As presented in Equationequation (3)(3)
(3) and , the rate of return of the automated method compared to the conventional method was found to be 7.19%, which indicates very high profitability for the developed robot.
Figure 13. Rate of return analysis results.
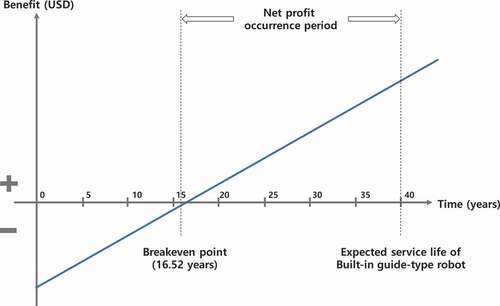
(4) Breakeven point analysis
The breakeven point is time at which the present value of the generated benefit is equal to that of the generated cost. The profit owing to utilization of the cleaning robot occurs after the breakeven point. As presented in Equationequation (4)(4)
(4) and , the breakeven point of the automated method was found to be 16.52 years.
Figure 14. Breakeven point analysis results.
4.3.3. Reduction in annual cleaning costs with the equivalent annual worth method
The equivalent annual worth method compares the cash flow of an investment under the assumption that the benefits and costs are evenly generated each year during the analysis period. EquationEquation (5)(5)
(5) and present the annual reduction in the cost of exterior wall cleaning achieved with the automated method compared to the conventional method. The automated method saves 31,739.72 USD per year during the service life of the target building (40 years), which is a cost reduction of 49.21%.
Figure 15. Cost reduction with the equivalent annual worth method.
4.3.4. Sensitivity analysis
A sensitivity analysis is needed to evaluate the variability of the LCC analysis results because the input variables or assumptions may change depending on the environment and conditions. Therefore, a sensitivity analysis was performed on 1) the number of exterior wall cleanings per year, 2) the discount rate and annual maintenance cost, and 3) the robot and guide rail installation costs.
(1) Sensitivity analysis on the number of exterior wall cleanings per year
Although the number of exterior wall cleanings per year was set to one in the LCC analysis previously discussed, a sensitivity analysis was performed on the number of cleanings per year because public institutions and conglomerate headquarters are generally cleaned twice a year, and the number of times the cleaning is undertaken may also change at the discretion of the building owner. indicates that the economic efficiency of the cleaning robot compared to the conventional method significantly improved as the number of times cleaning was undertaken per year increased.
(2) Sensitivity analysis on the discount rate and maintenance cost
Table 7. Sensitivity analysis on the number of times cleaning is undertaken per year.
Changes in discount rates such as the inflation rate and time deposit interest rate, as well as the robot maintenance cost, are the primary assumptions and variables that affect future commercial application and marketing of the automated cleaning technology. present the sensitivity analysis on the discount rate and maintenance cost, respectively. The developed robot was found to be economically efficient in the analyzed ranges of the discount rate and maintenance cost. Therefore, the robot demonstrated high economic efficiency under all economic conditions and working environments.
(3) Sensitivity analysis on the robot and guide rail installation costs
Table 8. Sensitivity analysis on the discount rate.
Table 9. Sensitivity analysis on the maintenance cost.
A sensitivity analysis was conducted considering the cost of the manufacturing of the robot components and the cost of the changes required in the curtain wall design to incorporate the guide rails. The results presented in showed that the automated method is not economically viable if the cost derived from installing the guide rails exceeded 57.74% of that of a conventional curtain wall. This indicates that the manufacturing cost of the guide rail curtain wall should be reduced. Eventually, a commercialization model should be developed that focuses on reducing the installation costs of the guide rails to improve the economic efficiency.
Table 10. Sensitivity analysis on the robot cost.
Table 11. Sensitivity analysis on the guide rail installation cost.
(4) Synthesis of results
As a result of the sensitivity analysis, the economic feasibility of the cleaning robot was found to be most sensitive to the installation costs of the guide rails, making the automated method unviable if the price of the guide rail increased by 57.74% compared to a conventional curtain wall. Furthermore, it was confirmed that the possible profit is sensitive to the number of exterior wall cleanings per year, with the economic feasibility significantly improving as the number of times cleaning was undertaken increased. Conversely, it was concluded that the sensitivity was lower to other variables, such as the discount rate, maintenance cost, and cost of the cleaning robot, .
In addition to the above LCC analysis results, introducing a cutting-edge and landmark element to the exterior of newly constructed high-rise buildings such as the developed robot should provide significant intangible benefits, such as an increase in real estate value. This is because the introduction of new technologies such as information and communications technology affects the value of real estate (Dixon Citation2005).
5. Conclusions
The conclusions of this study are as follows:
The annual cleaning cost of the conventional cleaning method, specifications and initial investment cost of the considered robot, guide rail installation cost, and service life and maintenance cost of the robot were specified to develop the LCC analysis model of the automated cleaning method ().
For the exterior wall cleaning of the target building, the conventional method incurred a cost of 64,500 USD, while the automated method required the installation of guide rails at a cost of 695,371.48 USD, excluding the initial investment and maintenance costs of the robot. The cleaning robot had an NPV of 874,377.35 USD, B/C ratio of 1.97, rate of return of 7.19%, breakeven point of 16.52 years, and annual cost reduction of 31,739.72 USD/year (49.21%). This indicates that the automated method has significantly higher economic efficiency than conventional methods for the case study herein discussed.
The sensitivity analysis showed that the economic efficiency of the automated method improved with the number of exterior wall cleanings per year. The sensitivity analysis on the discount rate and maintenance cost revealed that the robot demonstrated excellent economic efficiency under all possible economic conditions and working environments. The sensitivity analysis on the robot and guide rail installation costs showed that the economic efficiency significantly improved as the robot cost decreased and that the automated method lost the economic efficiency if the installation of the guide rails requires an investment of more than 57.74% of the cost of a conventional curtain wall. Therefore, the manufacturing cost of the guide rail curtain wall should be reduced for future marketing and distribution of the developed robot.
The developed LCC analysis model has high utilization value because it not only provides the results for the robot in its current state but can also be applied to future developments of the robot. In addition, the LCC analysis model is not limited to the robot model herein considered but can also be applied to various robots for automating construction.
However, the developed robot has a limitation that it can be used only when the exterior of the building is simple. As a result, depending on the building shape, the suspended scaffold might be partially needed for complete cleaning, and economic feasibility may be questionable. A plan to overcome these limitations should be discussed through future research. Long-term data from building testbeds in which the developed robot is applied should be analyzed to further verify the reliability of the results of this study. In addition, the analysis model formulated in this study will enable an LCC analysis of cases in which various building facades and green walls are included.
Nomenclature
| LCC | = | Life Cycle Cost |
| VMR | = | Vertical Moving Robot |
| HMR | = | Horizontal Moving Robot |
| HHO | = | Handheld Operator |
| LC | = | Local Commander |
| FM | = | Facility Management |
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Dong-Jun Yeom
Dong-Jun Yeom, who earned his Ph.D. in Construction Management in Department of Architectural Engineering in 2018 from Inha University. He worked for the Industrial Science and Technology Research Institute at Inha University for 2 years. He has given a series of lectures on computer aided design, computer programming for engineering application, construction information technologies and etc. at Inha University since 2015. He currently serves as a postdoctoral research engineer in the Korea Institute of Civil Engineering and Building Technology.
Ju-Hak Kim
Ju-Hak Kim, who earned his Ph.D. in Construction Management in Department of Architectural Engineering in 2020 from Inha University. He currently serves as a President/CEO in Taebo Industries, Ltd.
Jun-Sang Kim
Jun-Sang Kim, who earned his matser in Construction Management in Department of Architectural Engineering in 2020 from Inha University. He is a Ph.D. student majoring in Construction Management at Inha University.
Young Suk Kim
Dr. Young Suk Kim, who earned his Ph.D. in Construction Engineering and Project Management in 1997 from the University of Texas at Austin. He has given a series of lectures on an execution of building work, construction management, time management, cost management, contract management, construction information technology, and automation in construction and etc. at Inha University since 1999. He currently serves as a professor in Department of Architectural Engineering at Inha University and a chairman of University Development Commission at Korea Institute of Construction Engineering and Management. His research interests are in the areas of sustainable construction, cost and time management, engineering education, and automation in construction. He has conducted various research projects in terms of automation in construction: an Automated Pavement Crack Sealing Machine, Tele-operated Concrete Pipe Laying Manipulator in the Trenches, Automated Controller for Checking Verticality and Automated, an Intelligent Excavating System, and etc.
References
- Akinfiev, T., M. Armada, and S. Nabulsi. 2009. “Climbing Cleaning Robot for Vertical Surfaces.” Industrial Robot: An International Journal 36 (4): 352–357. doi:10.1108/01439910910957110.
- Balaguer, C., and M. Abderrahim. (2008). “Robotics and Automation in Construction.” In Reviews in IntechOpen. Balaguer, C. ed. London, UK: InTech, pp. 295–306 978-953-7619-13-8.
- Dixon, T. 2005. “The Impact of Information and Communications Technology on Commercial Real Estate in the New Economy.” Journal of Property Investment & Finance 23 (6): 480–493. doi:10.1108/14635780510626529.
- Economic Statistics System. (2019a). “Consumer Price Index of Bank Korea.” Retrieved from http://ecos.bok.or.kr/flex/EasySearch_e.jsp
- Economic Statistics System. (2019b). “Deposit Bank Weighted Average Interest Rate of Bank Korea.” http://ecos.bok.or.kr/flex/EasySearch_e.jsp
- Fraunhofer, I. F. F. (2021). “Facade Cleaning Robot Sirius.” https://www.iff.fraunhofer.de/en/business-units/robotic-systems/facade-cleaning-sirius.html
- Gambao, E., and M. Hernando (2006). “Control System for a Semi-Automatic Façade Cleaning Robot,” In Proceedings of the 23rd ISARC 2006, Tokyo, Japan, pp. 3–5.
- Hamburg University. (2001). “Sky Cleaners.” https://tams.informatik.uni-hamburg.de/people/alumni/hzhang/projects/skycleaners/index.php (accessed on 1 April 2020).
- Han, C. S. (2015). “Report on the Development of Intelligent Robot System for High-rise Building Exterior Wall Maintenance. Ministry of Land, Infrastructure and Transport Research Report.” South Korea.
- Han, J.-H., D.-J. Yeom, J.-S. Kim, and Y. S. Kim. 2020. “Life Cycle Cost Analysis of the Steel Pipe Pile Head Cutting Robot.” Sustainability (Switzerland) 12 (10). doi:10.3390/SU12103975.
- Hu, R., K. Iturralde, T. Linner, C. Zhao, W. Pan, A. Pracucci, and T. Bock. 2021. “A Simple Framework for the Cost-benefit Analysis of Single-task Construction Robots Based on A Case Study of A Cable-driven Facade Installation Robot.” Buildings 11 (1): 1–17. doi:10.3390/buildings11010008.
- IPC Eagle. (2021). “High Rise.” http://www.ipcworldwide.com/us/product/highrise-automatic-window-cleaning-system
- Kim, T., Y. Jeon, S. Yoo, K. Kim, H. S. Kim, and J. Kim. 2017. “Development of a Wall-climbing Platform with Modularized Wall-cleaning Units.” Automation in Construction 83 (April): 1–18. doi:10.1016/j.autcon.2017.07.004.
- Korea Occupational Safety & Health Agency. (2019). “Domestic Disaster Cases.” http://www.kosha.or.kr/english/index.do ( assesed on 2019).
- Lee, Y.-S., S.-H. Kim, M.-S. Gil, S.-H. Lee, M.-S. Kang, S.-H. Jang, B.-H. Yu, B.-G. Ryu, D. Hong, and C.-S. Han. 2018. “The Study on the Integrated Control System for Curtain Wall Building Façade Cleaning Robot.” Automation in Construction 94 (June): 39–46. doi:10.1016/j.autcon.2017.12.030.
- Lee, J. G., and D. J. Lee. 2012. “Study of Automatic Cleaning Tool Design for Façade in High-rise Buildings.” Journal of the Korean Society for Precision Engineering 29 (1): 56–63. doi:10.7736/KSPE.2012.29.1.056.
- Manntech. (2021). Manntech https://www.manntech.com
- Moon, S. M., D. Hong, S. W. Kim, and S. Park (2012). “Building Wall Maintenance Robot Based on Built-in Guide Rail.” 2012 IEEE International Conference on Industrial Technology, ICIT 2012, Proceedings Athens, Greece, pp. 498–503. 10.1109/ICIT.2012.6209987.
- Moon, S. M., C. Y. Shin, J. Huh, K. W. Oh, and D. Hong. 2015. “Window Cleaning System with Water Circulation for Building Façade Maintenance Robot and Its Efficiency Analysis.” International Journal of Precision Engineering and Manufacturing - Green Technology 2 (1): 65–72. doi:10.1007/s40684-015-0009-8.
- Nansai, S., M. R. Elara, T. T. Tun, P. Veerajagadheswar, and T. Pathmakumar. 2017. “A Novel Nested Reconfigurable Approach for A Glass Façade Cleaning Robot.” Inventions 2 (3): 1–14. doi:10.3390/inventions2030018.
- Nansai, S., and R. E. Mohan. 2016. “A Survey of Wall Climbing Robots: Recent Advances and Challenges.” Robotics 5 (3): 1–14. doi:10.3390/robotics5030014.
- National Law Information Center. (2019). “The Preliminary Feasibility Study Guideline.” http://www.law.go.kr/admRulSc.do?tabMenuId=tab107&query=%EC%98%88%EB%B9%84%ED%83%80%EB%8B%B9%EC%84%B1%EC%A1%B0%EC%82%AC#liBgcolor5
- Qian, Z.-Y., Y.-Z. Zhao, Z. Fu, and Q.-X. Cao. 2006. “Design and Realization of a Non-Actuated Glass-Curtain Wall-Cleaning Robot Prototype with Dual Suction Cups.” The International Journal of Advanced Manufacturing Technology 30 (1–2): 147–155. doi:10.1007/s00170-005-0031-z.
- Seo, T. W., Y. Jeon, C. Park, and J. Kim. 2019. “Survey on Glass and Façade-Cleaning Robots: Climbing Mechanisms, Cleaning Methods, and Applications.” International Journal of Precision Engineering and Manufacturing - Green Technology 6 (2): 367–376. doi:10.1007/s40684-019-00079-4.
- Sugiyama, Y. (1998). “Device for Horizontal Moving an Apparatus Working at a High Location.” US Patent, No. 4811819. http://patft.uspto.gov/netacgi/nphParser?Sect1=PTO1&Sect2=HITOFF&d=PALL&p=1&u=%2Fnetahtml%2FPTO%2Fsrchnum.htm&r=1&f=G&l=50&s1=4811819.PN.&OS=PN/4811819&RS=PN/4811819
- Tun, T. T., M. R. Elara, M. Kalimuthu, and A. Vengadesh. 2018. “Glass Facade Cleaning Robot with Passive Suction Cups and Self-locking Trapezoidal Lead Screw Drive.” Automation in Construction 96 (September): 180–188. doi:10.1016/j.autcon.2018.09.006.
- Weng, Y., M. Li, S. Ruan, T. N. Wong, M. J. Tan, K. L. Ow Yeong, and S. Qian. 2020. “Comparative Economic, Environmental and Productivity Assessment of a Concrete Bathroom Unit Fabricated through 3D Printing and a Precast Approach.” Journal of Cleaner Production 261: 121245. doi:10.1016/j.jclepro.2020.121245.
- Yeom, D.-J., and Y.-S. Kim. 2014. “Development of an Approximate Estimate System for Exterior Finishing Works of Super High-rise Buildings.” Journal of the Architectural Institute of Korea Structure and Construction 30 (7): 97–104. doi:10.5659/JAIK_SC.2014.30.7.97.
- Yeom, D. J., E. J. Na, M. Y. Lee, Y. J. Kim, Y. S. Kim, and C. S. Cho. 2017. “Performance Evaluation and Life Cycle Cost Analysis Model of a Gondola-type Exterior Wall Painting Robot.” Sustainability (Switzerland) 9 (10). doi:10.3390/su9101809.
- Yokota, T., Y. Nishiyama, and T. Takasaki (1987). “Horizontal Moving Automatic Outer Surface Cleaning.” US Patent, No. 4809384. http://patft.uspto.gov/netacgi/nph-Parser?Sect1=PTO1&Sect2=HITOFF&d=PALL&p=1&u=%2Fnetahtml%2FPTO%2Fsrchnum.htm&r=1&f=G&l=50&s1=4809384.PN.&OS=PN/4809384&RS=PN/4809384
- Yoo, S., I. Joo, J. Hong, C. Park, J. Kim, H. S. Kim, and T. Seo. 2019. “Unmanned High-rise Façade Cleaning Robot Implemented on a Gondola: Field Test on 000-building in Korea.” IEEE Access 7: 30174–30184. doi:10.1109/ACCESS.2019.2902386.
- Zhao, X., C. Wu, and D. Liu. 2021. “Comparative Analysis of the Life-cycle Cost of Robot Substitution: A Case of Automobile Welding Production in China.” Symmetry 13 (2): 1–33. doi:10.3390/sym13020226.
- Zwicker, C., V. Hammerstingl, C. Possin, and G. Reinhart. 2016. “Life Cycle Cost Estimation of Robot Systems in an Early Production Planning Phase.” Procedia CIRP 44: 322–327. doi:10.1016/j.procir.2016.02.117.