
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
In the structural engineering field, multi-objective optimization is a difficult task as demands of objective functions in structural designs are sometimes conflicting, such as costs and structural weight. Some previous studies which are mainly based on metaheuristics have investigated multi-objective optimizations to deal with such conflicts. However, the optimized results obtained by the populations-based methods do not present the tradeoff ratios contributed by each objective function. This study provides a five-step multi-objective optimization that can be used by structural engineers and decision-makers who are not familiar with optimization algorithms. The unified function of objectives (UFO) is optimized to derive the Pareto frontier. Design requirements are imposed by equality and equality constraints. The multiple design variables are obtained using Newton-Raphson iterations which solves huge differential equations representing Jacobi equations of UFO. The five steps to optimize the design of a doubly reinforced concrete beam proposed in this study are based on an ANN-based Lagrange optimization algorithm developed in previous studies by the authors. Optimized designs are presented and verified, showing trade-off ratios of objective functions. An example of decision-making based on the UFO is presented, which engineers and decision-makers can use as a guide throughout a preliminary design stage.
GRAPHICAL ABSTRACT
1. Introduction and previous studies
Over the last few decades, an optimization in structural design has gained an interest of researchers and engineers. According to Mei, L. and Wang, Q. et al. (Mei and Wang Citation2021), structural optimization objective functions can be divided into four major categories, including cost minimization, structural performance improvement, environmental impact minimization, and multi-objective optimization. The objective functions are typically conflicting, requiring careful steering to achieve a balance. Multi-objective-based optimization challenges arise in many areas of the structural engineering field. For example, a common task based on multiple objective functions is to minimize cost while reducing the amount of carbon dioxide (CO2) emissions. These objective functions are reasonably prevailing when the demands of the architect, structural engineers, construction engineers, and the government are conflicting. Choi, S.W. et al. (Choi, Oh, and Park Citation2017) proposed design strategies for reducing high-rise building costs and CO2 emissions. Martinez-Martin et al. (Martinez-Martin et al. Citation2012) included the economic cost, embedded CO2 emissions, and reinforcing steel congestion as three objective functions to design bridge piers with hybrid heuristic algorithms. Munk, D.J. et al. (Munk, Vio, and Steven Citation2015) reviewed studies of bi-objective-based optimization, including topology and shape optimization using evolutionary algorithms. Numerous researchers have investigated and developed optimization algorithms to solve multiple-objective optimization (MOO) challenges. A prevailing MOO algorithm is based on an evolutionary algorithm such as Nondominated Sorting Genetic Algorithm I and II (NSGA and NSGA II) by Deb et al. (Deb et al. Citation2002), Self-regulated Particle Swarm Multi-task optimization by Zheng et al. (Zheng et al. Citation2021) and Mohd Zain et al. (Mohd Zain et al. Citation2018), Multi-objective Tabu Search algorithm by D Jaeggi et al. (Jaeggi et al. Citation2005), MOO for diversity and performance in conceptual structural design by Brown (Brown, Tseranidis, and Mueller Citation2015; Brown Citation2016). Zheng and Hu in 2018 (Zheng and Hu Citation2018) studied multi-objective optimal design on vibration suppression of building structures with active mass damper. MOO design of truss structures has been studied by Nan (Nan, Bai, and Wu Citation2020) and Kaven (Kaveh and Mahdavi Citation2019). Afshari et al. (Afshari, Hare, and Tesfamariam Citation2019) reviewed and compared MOO algorithms with constraints in reinforced concrete (RC) structures. Metaheuristics-based algorithms applied to multi-objective functions optimizing a design of RC frames have been studied in Babaei and Mollayi (Citation2021; Bekdaş and Nigdeli (Citation2017); Kaveh and Sabzi (Citation2012). Barraza M. and his partners (Barraza et al. Citation2017) investigated MOO of structural steel buildings. Some other MOO studies of RC structures have been done in Arama et al. (Citation2020); Lee, Hong, and Choi Citationn.d.; Park et al. (Citation2013); Kayabekir et al. (Citation2020). Researchers have investigated populations-based MOO algorithms in a design of RC beams (Shaqfa and Orbán Citation2019) in Tahmassebi et al. (Citation2020); Zhang et al. (Citation2021); Ferreira, Barros, and Barros (Citation2003); Bekdas and Nigdeli (Citation2013); Coello, Hernández, and Farrera (Citation1997); Jahjouh, Arafa, and Alqedra (Citation2013).
A Pareto frontier or a Pareto front is regarded as a set of the multi-objective optimized results. One of the engineers’ interests is to investigate the particular tradeoff ratio estimating how much sacrifice each objective function makes. The evolutionary-based MOO algorithms such as NSGA and Particle Swarm Optimization require post-processing techniques to show the tradeoff ratio, making them known as approaches with a posterior articulation of preferences (Marler and Arora Citation2004). This seems unwelcome by engineers and decision-makers who are unfamiliar with optimization algorithms while having more interests in trade-off ratios among several objective functions that prevent applications of evolutionary-based MOO algorithms to real-life situations. Furthermore, the methodology of the population-based MOO algorithms is based on biological rules such as crossover and mutation in NSGA I and II that are unfamiliar to structural engineers. When a full understanding of the evolutionary-based optimization algorithms is absent, the evolutionary-based MOO studies can be difficult for engineers to apply to real-life structural design cases. Few studies have investigated the gradient-based MOO algorithms in which the first gradient of objective functions become zero at a saddle point, yielding optimized results. Xin Liu et al. (Liu and Reynolds Citation2016) proposed a gradient-based multi-objective-based optimization implementing a weighted sum approach.
In the present study, the authors implemented the AI-based Lagrange optimization algorithm incorporating multiple objective functions and its application in design of RC beams following the Building Code Requirements for Structural Concrete ACI 318–19 (Citation2019). The ANN-based Lagrange algorithm based on a weighted sum approach (Yang Citation2014) to formulate the unified function of objective including a five-step optimization is used to solve MOO problems in this study. Lagrange multipliers are used with equality and inequality conditions based on KKT conditions to handle constrained conditions following design requirements. The unified function of objectives (UFO) is used to globalize multiple objective functions so that multiple objective functions can be optimized simultaneously to derive the Pareto frontier which cannot be found using conventional design methods. Design requirements are imposed by equality and equality constraints. The multiple design variables are obtained using Newton-Raphson iteration which solves huge differential equations representing Jacobi equations of UFO. Saddle points are, then, identified using initial trial input variables which are updated until the solutions converge. Thus, ANN-based Lagrange optimization algorithm calculates saddle points at which the first derivative of Lagrange function becomes zero. An application to a design of doubly RC beams minimizing cost, environmental impact, and beam weight is conducted based on the five-step optimization using the optimization and training toolbox provided by MATLAB (MathWorks Citation2020b). An example of decision-making using the optimized results are introduced in this study that can aid engineers for final decisions in preliminary design stage. The Pareto frontier illustrates the tradeoff ratio of investigated objective functions that are not displayed by the metaheuristics-based results. The algorithm has been initially proposed by Hong et al. (Hong and Nguyen Citation2021) and (Hong, Nguyen, and Nguyen Citation2021), utilizing Artificial Neural Networks (ANN) to generalize objective functions. Lagrange multiplier method and KKT conditions are used to handle constraining conditions (Kuhn and Tucker Citation1951; Karush Citation1939). ANNs have been investigated in optimization design of RC members by Yücel et al. (Yücel et al. Citation2021b) and (Yücel et al. Citation2021a), in design of steel beams in (Ferreira et al. Citation2022; Nguyen, Ly, and Tran Citation2021; Hosseinpour, Sharifi, and Sharifi Citation2020; Sharifi et al. Citation2020).
The present study consists of the following sections. Section 2 introduces design scenarios of a doubly RC beam, while Section 3 explains a five-step optimization. This manuscript describes the ANN-based Lagrange optimizations, leading to Pareto frontier in Section 3.2. The case study of the manuscript shows the design accuracies of the Pareto frontier is validated by structural-based large datasets in Section 4. Section 5 shows a design example based on a set of optimizations minimizing several objective functions simultaneously as decision-making guidance. Finally, practical conclusions and design recommendations are drawn in Section 6.
2. Design scenarios of RC beams
2.1. Selection of design parameters based on design criteria of doubly RC beams
This study presents an application of ANN-based Lagrange optimization of doubly RC beams with two-end fixed boundary conditions, as shown in , where denotes a span length, cross-sectional dimensions are also denoted by beam width (
) and beam depth (
).
and
denote compressive and tensile reinforcement ratio (or rebar ratio), respectively. A beam section (
,
), and reinforcement details (
and
) of a doubly RC beam must be designed to satisfy requirements in terms of strength, serviceability, and reinforcement detailing specified in the design code ACI 318–19 (Citation2019). In this study, nominal flexural strength (
) is required to be equal to factored moment (
), which is a combination of dead load (
) and live load (
) meeting strength criteria. To avoid brittle behaviour in the case of an overload, a reinforcement strain is limited at a design strength.
and
are reinforcement strains at a concrete strain of 0.003. Serviceability is reflected in
and
, referring to immediate deflections and time-independent deflections which are limited to
and
, respectively. It is worth noting that the cracking moment
, which must be less than
to control a minimum of flexural reinforcement according to ACI 318–19 (Citation2019), is investigated when calculating
. A design of a longitudinal compressive and tensile rebar in this study includes a calculation of compressive rebar ratio (
) and tensile rebar ratio (
) based on their rebar areas
and
, respectively. For a rectangular cross-section of doubly RC beams, a reinforcement ratio is calculated as the ratio of rebar area to cross-sectional gross area, which is equal to
. Rebar details such as maximum and minimum spacing are also determined, where a clear concrete cover
of
, reinforcement of ϕ29, and aggregates of ϕ20 are used in this study. shows the nine inputs for these design criteria, which include five parameters to define a beam section (
), two material properties (
) for concrete strength and rebar yield strength, respectively, and two externally imposed moments (
,
). Seven output parameters,
and
, are calculated from nine inputs. A forward design of doubly RC beams requires determining seven outputs from nine given input parameters. describes input and output parameters with their nomenclature.
Table 1. Nomenclature of design parameters.
Table 2. Design criteria for a design of ductile RC beams according to ACI 318–19 (Citation2019).
Figure 1. Configuration of a doubly RC beam.
2.2. Selection of objective functions
In this study, a design of a doubly RC beam is optimized based on three objective functions, overall construction cost and material cost (), beam weight (
), and
emissions, which are selected based on engineers’, contractors’, and the government’s interests. The overall cost or cost index (
) of a doubly RC beam is calculated based on Korean unit cost for concrete and rebar, as defined in (Hong et al. Citation2010).
emission units and the unit weight of concrete and rebar are shown in to calculate
emissions and the weight of a doubly RC beam.
Table 3. Unit cost of reinforcement and concrete based on Korean unit (Hong et al. Citation2010).
2.3. An optimization scenario
In this study, a design of a doubly RC beam in which and
are minimized simultaneously is performed. Beam sections (
) are designed for a fix–fix boundary conditions having a beam span
mm. Beam depth
is designed in a range of
mm, while a beam section has an aspect ratio
within
. The concrete strength and rebar yield strength used in this study are
MPa and
MPa, respectively. Dead load
and live load
are given as
kN.m and
kN.m, respectively. The design of ductile doubly RC beams follows ACI-based requirements in terms of strength, serviceability, and rebar details, as described in . The conventional design parameters in contain nine input parameters and ten output parameters when generating large datasets. Optimized beam parameters (
) are then determined on an output-side during an optimization design of a doubly RC beam, resulting in minimized
and
. Input parameters and 0 output parameters implemented in beam optimization will be discussed in Section 3.2.
3. MOO design of doubly RC beams
3.1. Optimization using the optimization toolbox of Matlab
Hong et al. (Hong and Nguyen Citation2021) described ANN-based Lagrange optimization based on a single-objective function. The authors introduced an ANN-based Lagrange optimization and its application to cost minimization for RC beams (Hong, Nguyen, and Nguyen Citation2021). In the authors’ previous study, an algorithm based on the weighted sum method was used to develop a unified function of objective (UFO) for RC columns (CitationHong et al. XXXX). This study derives a UFO for RC beams so that several objective functions can be optimized simultaneously. UFO is optimized based on MATLAB’s optimization toolbox; thus, readers do not have to derive any optimization code. Engineers and users only have to provide constraint conditions of their interests. Engineers can follow five steps demonstrated in to optimize the unified function of objective minimizing cost, beam weight, and emissions of doubly RC beams.
Figure 2. AI-based Lagrange optimization algorithm of five steps based on unified functions of objectives (UFO).
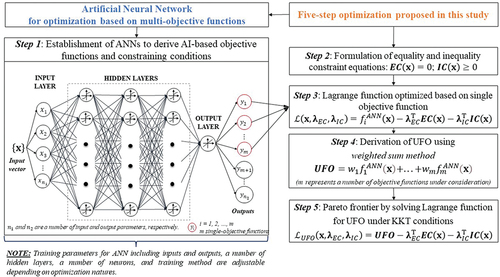
MATLAB’s toolbox is used to perform UFO optimization. Section 3.2 explains the five steps in detail. A general description of a five-step optimization is introduced as follows. Initially, structural datasets are generated based on structural mechanics-based software by using randomly selected input parameters within their design ranges to obtain corresponding outputs. Structural mechanics-based software is developed based on strain-compatibility theory following a conventional design. An Artificial neural network (ANN) is established on the basis of design and training parameters such as a number of hidden layers, a number of neurons, and a training method chosen according to optimization natures. ANNs are trained by generated datasets to derive objective functions, ,
, and
emissions. These ANN-based objective functions can replace analytical ones, which are difficult to be derived by structural engineers analytically and explicitly because there are abounding design parameters for each type of structure. The design of RC beams should meet various requirements imposed by the design codes, architectural interests, and construction limitations.
, with
being an input vector based on
to
is an objective function generated by ANNs, where
is a number of objective functions. Each objective function
is “weighted” by a fraction
to be united in a UFO as shown in EquationEq. (1
(1)
(1) ), where the weighted sum is simple and convenient for MOO problems. A set of optimizations in MOO problems yields a Pareto frontier. As shown in EquationEq. (2
(2)
(2) ), the fractions of all objective functions sum up to 1. UFO is optimized using fractions ranging from 0 to 1.
In this study, the FMINCON function from the MATLAB’s optimization toolbox (MathWorks Citation2020b) is used to find saddle points for a constrained nonlinear multivariable UFO. Engineers and users provide constrained conditions and objective functions, determining optimization natures. Lagrange functions shown in EquationEquations (3a)(3a)
(3a) and (Equation3b
(3b)
(3b) ) present objective functions to be optimized by FMINCON. EquationEquation (3a)
(3a)
(3a) is used when single objective is optimized while EquationEquation (3b)
(3b)
(3b) is used in case of an optimization based on multi-objective functions. Multiple-objective functions
are included in UFO. Constrained conditions of optimization problems are included in the equality constraint
and inequality constraint
in which
and
are Lagrange multipliers used for constrained conditions. The gradient-based algorithm in MATLAB’s optimization toolbox finds saddle points
by updating the Hessian of the Lagrangian
through Newton–Raphson iterations based on initial saddle points
, shown in EquationEq. (6)
(6)
(6) and EquationEq. (7)
(7)
(7) . Saddle points
are found when a convergence criterion
, as shown in EquationEq. (8
(8)
(8) ), is met.
3.2. Five steps to optimize the design of doubly RC beams based on three objective functions
This section describes five steps minimizing cost, beam weight, and emissions simultaneously for doubly RC beams. A Pareto frontier optimizing a doubly RC beam design based on multiple-objective functions is obtained by five steps.
Step 1 describes how to establish an ANN to generate ANN-based objective functions of , and
. A topology of an ANN used in this study is described in . Step 2 introduces design and an optimization scenario. Equality constraints
and inequality constraints
are also imposed in Step 2 based on the code requirements and other interests from architects and engineers. AI-based objective functions derived in Step 1,
and inequality constraints
formulated in Step 2 are used to calculate ANN-based Lagrange optimization shown in EquationEq. (3a)
(3a)
(3a) for optimization of single objective function in Step 3. The optimized design parameters
and
are obtained on an output-side using the Newton–Raphson iteration, described in shows a flow of an optimization for beam designs based on the ANN-based Lagrange optimization algorithm established in . The optimized beam parameters
and prescribed parameters
provided in are input parameters in the ANN model and structural mechanics-based software to calculate corresponding design parameters
and
on an outside. The obtained parameters
and
are optimized design parameters, which yield a Pareto frontier. Step 4 derives UFO based on equally spaced fractions of objective functions shown in EquationEquations (1)
(1)
(1) and (Equation2
(2)
(2) ) to globalize multiple objective functions derived from a trained ANN as shown in Step 1. UFO is used in EquationEq. (3b
(3b)
(3b) ), formulating Lagrange function of multiple objective functions. Saddle (stationary) points of Lagrange function of UFO under KKT conditions are the optimized design parameters to identify a Pareto frontier. The Pareto frontier based on UFO, which is obtained by UFO-based ANN as shown in , is verified by structural mechanics-based software Autobeam where
and
are validated.
Table 4. Optimization design scenario of a doubly RC beam.
Figure 3. A topology of an ANN for a design of doubly RC beams.
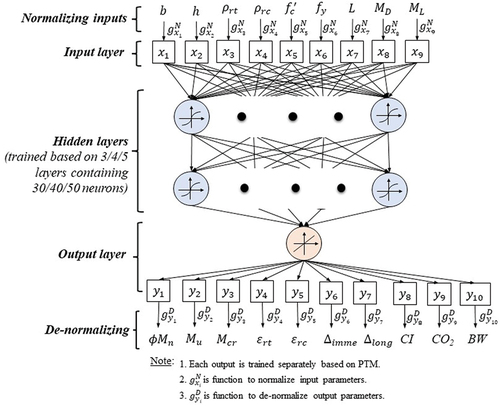
Figure 4. Flow of optimized designs based on AI-based Lagrange optimization algorithm.
3.2.1. Step 1–Establishment of an ANN
Step 1.1: Selecting random design ranges to generate large datasets
shows the nomenclatures of 19 input and output parameters generated in 100,000 datasets. Large datasets of ductile doubly RC beams are generated by randomly varying input parameters (,
) within their design ranges described in . Corresponding outputs (
) are obtained using Autobeam, structural mechanics-based software developed by Nguyen and Hong et al. (Nguyen and Hong Citation2019), which is based on a strain-compatibility-based algorithm. It is worth noting that the design criteria shown in are included in Autobeam. To consider a wide range of beam designs, a beam length
randomly varies from
. Beam depth
is randomized in a range of
, while beam width is generated to satisfy an aspect ratio
of
. Load parameters
and
are generated within
and
, respectively. Concrete compressive strength and rebar yield strength are randomized in their ranges, such as
and
, respectively. The 100,000 datasets used to train ANNs derived in Step 1.2 are provided in , where non-normalized datasets and datasets normalized between
1 and 1 are shown.
Table 5. Design range to generate 100,000 data used for training ANNs.
Table 6. 100,000 datasets to train ANNs.
Step 1.2: Selecting training parameters
Training parameters implemented in training ANNs include the following:
A number of hidden layers
A number of neurons
A type of activation functions applied to all layers including the output layer
A number of required epochs and number of validated epochs
A training method, such as training on entire datasets (TED), parallel training method (PTM), chained training scheme with revised sequence (CRS) (Hong Citation2020).
Training parameters are selected based on the complexity of large datasets and the availability of computation hardware. An ANN in this study uses three, four, and five hidden layers, each of which contains 30, 40, and 50 neurons. shows the training accuracies. The activation functions are tanh at hidden layers and linear at an output layer. PTM is selected in which nine input parameters are mapped to each of the 10 outputs separately. shows the topology of an ANN. MATLAB training toolbox (MathWorks Citation2020b) is used to train ANNs.
Table 7. Training accuracies obtained based on three, four, and five hidden layers, each of which contains 30, 40, and 50 neurons.
3.2.2. Step 2–Defining MOO problems
Step 2.1: Deriving objective functions
This study investigates a design of doubly RC beams having an optimization scenario described in Section 2.3. Functions of three objectives , and
to be minimized are derived from an ANN denoted as
and
, respectively, as shown in Step 1 and illustrated in EquationEquations (9)
(9)
(9) –(Equation11
(11)
(11) ), where
consists of five preassigned inputs (
, and
) shown in and four input variables (
, and
), which are to be determined based on the Newton–Raphson iteration.
is used to normalize inputs so that it has a dimension of
. These normalized inputs are then interconnected to hidden layers through interior weight and bias matrices before being sent to an output layer.
is a weight matrix to transfer an input parameters
to the first hidden layer, making its dimension
, representing 30 neurons and 9 inputs.
is a bias matrix added in hidden layers 1 to 3, making their dimensions of 30 neurons
1 layer.
and
are weight matrices of interior layers (hidden layers 2 and 3) so that they are a square matrix of
.
and
are matrices of weight and bias at an output layer so that their dimensions are
and
, respectively. Normalized output parameters are denormalized based on a denormalization function
. The matrix dimensions of the objective functions vary because the dimension of training parameters can change to train objective functions the best. In this study, dimensions of weight and bias matrices in the three objective functions are the same because training parameters with 3 layers and 30 neurons are used to train three objective functions as shown in .
Step 2.2: Formulation of equality and inequality constraints
Six equalities and eleven inequalities are formulated in to reflect constrained conditions based on design criteria and engineers’ needs.
Table 8. Formulation of equality and inequality constraints.
(a) Equality constraints:
Five equalities represent five preassigned parameters
. Factored moment
is formulated as another equality
.
(b) Inequality constraints:
Strength requirements and
imposed by the ACI 318–19 are formulated into two inequalities
and
, respectively. A design range of beam depth
that is within
is reflected by
and
The beam width
is constrained by an aspect ratio
, presented by
and
. Inequalities
illustrate serviceability requirements described in .
3.2.3. Step 3–Optimization based on a single-objective function
This step is required to maximize and minimize each objective function to define their boundaries for normalization because each normalized objective function is multiplied by a fraction to derive UFO. Optimization based on a single-objective function is based on the FMINCON function in MATLAB optimization toolbox, which was introduced in Section 3.1, including equalities and inequalities formulated in . EquationEquations (12) and (14)(12)
(12) formulate Lagrange functions based on three single-objective functions
and
shown in EquationEquations (9) and (11)
(9)
(9) .
Single-objective functions and
are normalized from their corresponding minimum to maximum provided in , as shown in EquationEq. (15)
(15)
(15) to (17).
Table 9. Optimized single-objective functions.
3.2.4. Step 4–Formulation of UFO
(a) Defining fractions
Fractions of three objective functions are generated based on the linspace function in MATLAB, which is a function of linear spacing to assure that they are equally distributed between 0 and 1. EquationEq. (18)
(18)
(18) defines 19 fractions of
that are equally spaced between 0 and 1 so that their spacing is equal to
. In EquationEq. (19)
(19)
(19) , 19 fractions of
are, then, equally spaced between 0 and
obtained in EquationEq. (18)
(18)
(18) . Fractions of
are calculated with respect to
and
using EquationEq. (20)
(20)
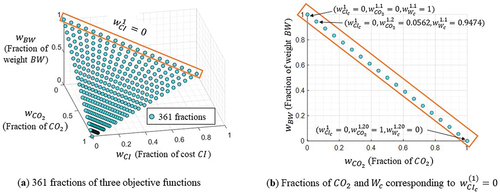
(20) . A total of 361 fractions of three objective functions are generated based on the formulas presented in and . A number of fractions is adjustable considering optimization natures.
Table 10. Equally spaced fractions generated based on MATLAB function, .
(b) Formulating UFO
EquationEq. (21)(21)
(21) shows UFO derived based on normalized objective functions obtained in EquationEquations (15)
(15)
(15) –(Equation17
(17)
(17) ). A Pareto frontier showing optimized designs of doubly RC beam is plotted on 361 fractions of three multiple-objective functions, as shown in .
3.2.5. Step 5–Optimization of UFO
Substituting equalities, inequalities shown in and UFO having 361 fractions shown in EquationEq. (21)(21)
(21) into Eq. (3) provides a Lagrange function for UFO, which minimizes designs of a doubly RC beam using the FMINCON function of MATLAB.
4. Discussions on the Pareto frontier
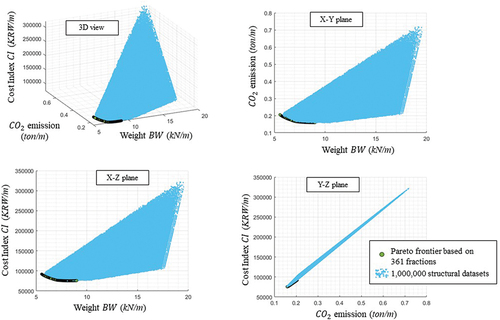
shows a Pareto frontier using 361 fractions optimizing designs of doubly RC beams based on the optimization scenario presented in Section 2.3. Each point on the Pareto frontier corresponding to a fraction in uncovers design parameters when optimizing doubly RC beams, providing engineers and decision-makers with particular trade-off ratios contributed by each of the three objective functions. An optimization accuracy is estimated based on two criteria:
Figure 5. Equally spaced fractions generated based on MATLAB function.
(1) Calculation accuracies obtained using EquationEq. (22)(22)
(22) are defined to indicate computational errors.
and
are obtained output parameters
and
using optimized parameters
,
and prescribed parameters
and
based on the ANN model and structural mechanics-based software Autobeam. In ) and , six optimized designs based on six fractions on a Pareto frontier are verified. Design points P1, P2, and P3 minimize the UFO of the multi-objective functions
, and
based on fractions
of 1:0:0, 0:1:0, and 0:0:1, respectively. Three other design points P4, P5, and P6 are based on fractions of the three objective functions with 0.34:0.33:0.33, 0.50:0.25:0.25, and 0.12:0.44:0.44, respectively, in which fractions of the three objective functions with 0.34:0.33:0.33 indicate optimizations contributed by each of the three objective functions,
, and
, are 34%, 33%, and 33%, respectively. Design accuracies obtained using EquationEq. (22)
(22)
(22) based on ANN and structural mechanics-based software Autobeam are as large as 5.5%.
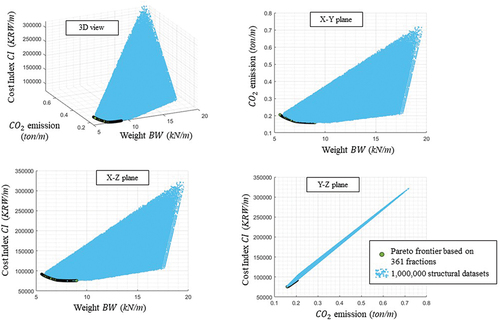
(2) Optimization accuracies are based on large structural datasets.
A Pareto frontier minimizing three objective functions (
, and
) simultaneously for a doubly RC beam obtained by the ANN-based Lagrange optimization algorithm is verified by a lower boundary generated by one million structural data based on structural mechanics-based software Autobeam, as shown in . One million structural data are filtered through preassigned five parameters
shown in . As shown in , the Pareto frontier representing minimized design parameters of a doubly RC beam predicts the lower boundary of one million structural datasets, verifying the optimization accuracies of the proposed AI-based Lagrange optimization.
Table 11. Optimized design parameters on a Pareto frontier illustrated in .
Figure 6. A Pareto frontier based on 361 fractions for RC beams based on three objective functions.
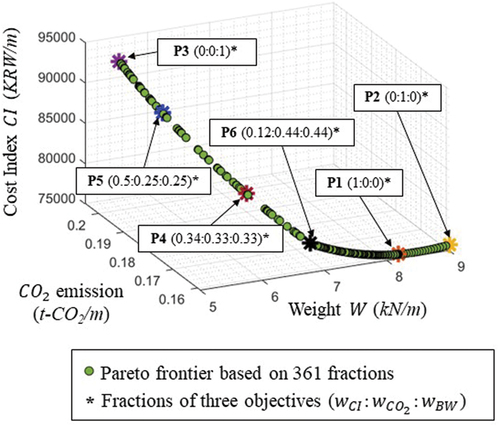
Figure 7. Verification of a Pareto frontier by 1 million structural datasets.
5. Decision–making based on a Pareto frontier
As shown in , a Pareto frontier provides optimized design parameters by simultaneously minimizing three objective functions (cost , and beam weight
), while a particular trade-off among the three objective functions is represented by a fraction
. The optimized design parameters and their corresponding fractions can significantly aid engineers and decision-makers in a preliminary design stage, offering them optimal designs minimizing
, and
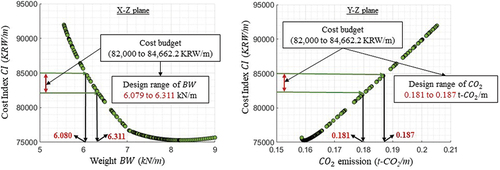
simultaneously. This section’s optimization example presents a design recommendation for a doubly RC beam. When the budget is assumed between 82,000 and 85,000 KRW/m, a doubly RC beam with constraint conditions shown in can be designed. When a design yields the least weight and
emissions at the same time, the ranges of
emissions and beam weight corresponding to the budget between 82,000 and 85,000 KRW/m can be estimated as 0.181–0.187 t-CO2/m and 6.079–6.311 kN/m, respectively, as shown in . The green dots in denote a Pareto based on 361 fractions obtained in and . A Pareto frontier shown in illustrates an estimated least design range of CO2 and BW when cost ranges from 82,000 to 85,000 KRW/m. helps determine a design meeting the least
of 6.079 kN/m in the range (6.079–6.311 kN/m) that corresponds to the minimized
= 84,662.2 KRW/m and
= 0.187 t-CO2/m when minimizing beam weight is preferable. A fraction of the design shown in is 0.11:0.49:0.40, indicating that minimizing
(
= 84,662.2 KRW/m) contributes 11% to the optimization based on multi-objective functions, UFO, while contributions of minimizing of
(
= 0.187 t-CO2/m) and
(
kN/m) are 49% and 40% to the unified optimization, respectively. As shown in , engineers without any computational limitations can choose one of design diverse options based on the trade-off ratios or fractions among the three objective functions corresponding to a project preference, allowing them to calculate minimized
and
for a pre-determined budget
and vice versa. For example, engineers can choose the design having the fractions of three objective functions
of 0.28:0.36:0.36 and 0.55:0.10:0.35 as shown in . An optimized design can now be selected based on multi-objective functions, assisting engineers to perform efficient designs.
Table 12. Design option with tradeoff ratios for an example shown in .
Table 13. Design parameters of two designs marked in blue color in .
Figure 8. Estimated design ranges for minimized and
corresponding to a defined cost budget.
6. Conclusions and contributions
This study proposed an optimization of multi-objective functions by which engineers and policymakers can make decisions. To enable simultaneous optimization, ANN-trained objective functions are globalized into one function UFO. A five-step optimization is described in detail and can be applied to help engineers design diverse structural systems. Optimization examples based on the multi-objective functions will assist engineers and decision-makers in the preliminary design stage. The following are some conclusions drawn from this study.
(1) This study formulates the unified functions of objectives (UFO) where multiple objective functions are globalized into one function. Saddle points of the Lagrange function of the UFO are found where multiple objective functions are optimized simultaneously. Engineers, contractors, and government can simply establish objective functions according to their own interests.
(2) A Pareto frontier is obtained from multi-objective functions, UFO, and confirmed by yielding a lower boundary which coincides with one obtained from a large structural dataset, ensuring the proposed optimization’s reliability. The accuracy of optimized designs provided by a five-step optimization based on ANN-based Lagrange optimization is verified by computation errors as large as 5.5%.
(3) Design requirements imposed by structural codes are reflected by equality and equality constraints while RC beams are optimized based on unified functions of objectives (UFO). The multiple design variables are now obtained using Newton–Raphson iteration which solves huge differential equations representing Jacobi equations of UFO.
(5) It is now possible to find holistic design parameters optimizing multi-objective functions with identifying fractions contributed by each objective function. The proposed ANN-based Pareto frontier offers the trade-off ratios that are not well presented when using the metaheuristics-based MOO algorithm.
(6) The optimized design parameters and their corresponding fractions can significantly aid engineers and decision-makers in a preliminary design stage, offering them optimal designs minimizing , and
simultaneously. An optimized design can now be selected based on multi-objective functions that can be implemented in achieving efficient designs.
Acknowledgements
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korean government (MSIT 2019R1A2C2004965).
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Won-Kee Hong
Dr. Won-Kee Hong is a Professor of Architectural Engineering at Kyung Hee University. Dr. Hong received his Master’s and Ph.D. degrees from UCLA, and he worked for Englelkirk and Hart, Inc. (USA), Nihhon Sekkei (Japan) and Samsung Engineering and Construction Company (Korea) before joining Kyung Hee University (Korea). He also has professional engineering licenses from both Korea and the USA. Dr. Hong has more than 30 years of professional experience in structural engineering. His research interests include a new approach to construction technologies based on value engineering with hybrid composite structures. He has provided many useful solutions to issues in current structural design and construction technologies as a result of his research that combines structural engineering with construction technologies. He is the author of numerous papers and patents both in Korea and the USA. Currently, Dr. Hong is developing new connections that can be used with various types of frames including hybrid steel–concrete precast composite frames, precast frames and steel frames. These connections would help enable the modular construction of heavy plant structures and buildings. He recently published a book titled as ”Hybrid Composite Precast Systems: Numerical Investigation to Construction” (Elsevier).
Thuc-Anh Le
Thuc Anh Le is a Master’s student at Structural Engineering/ Construction Technology at Kyung Hee University, Korea.
References
- “ACI CODE 318-19: Building Code Requirements for Structural Concrete and Commentary”. 2019
- Afshari, H., W. Hare, and S. Tesfamariam. 2019. “Constrained multi-objective Optimization Algorithms: Review and Comparison with Application in Reinforced Concrete Structures.” Applied Soft Computing Journal 83 (July): 105631. doi:10.1016/j.asoc.2019.105631.
- Arama, Z. A., A. E. Kayabekir, G. Bekdaş, and Z. W. Geem. 2020. “CO2 and Cost Optimization of Reinforced Concrete Cantilever Soldier Piles: A Parametric Study with Harmony Search Algorithm.” Sustainability 12 (15): 5906. doi:10.3390/su12155906.
- Babaei, M., and M. Mollayi. 2021. “Multiobjective Optimal Design of Reinforced Concrete Frames Using Two Metaheuristic Algorithms.” Journal of Engineering Research (Kuwait) 9 (4 B): 166–192. doi:10.36909/jer.9973.
- Barraza, M., E. Bojórquez, E. Fernández-González, and A. Reyes-Salazar. 2017. “Multi-objective Optimization of Structural Steel Buildings under Earthquake Loads Using NSGA-II and PSO.” KSCE Journal of Civil Engineering 21 (2): 488–500. doi:10.1007/s12205-017-1488-7.
- Bekdas, G., and S. M. Nigdeli. 2013. “Optimization of t-shaped RC Flexural Members for Different Compressive Strengths of Concrete.” International Journal of Mechanics 7 (2): 109–119.
- Bekdaş, G., and S. M. Nigdeli. 2017. “Modified Harmony Search for Optimization of Reinforced Concrete Frames.” Advances in Intelligent Systems and Computing 514: 213–221. doi:10.1007/978-981-10-3728-3_21.
- Brown, N., S. Tseranidis, and C. Mueller (2015). “Multi-objective Optimization for Diversity and Performance in Conceptual Structural Design.” Proceedings of the International Association for Shell and Spatial Structures (IASS) Symposium “Future Visions,” 20, 1–12. https://www.ingentaconnect.com/content/iass/piass/2015/00002015/00000020/art00012 Accessed 9 April 2020)
- Brown, N. C. (2016). “Multi-Objective Optimization Conceptual Design of Structures.” Massachusetts Institute of Technology - MSc Thesis, 1–113.
- Choi, S. W., B. K. Oh, and H. S. Park. 2017. “Design Technology Based on Resizing Method for Reduction of Costs and Carbon Dioxide Emissions of high-rise Buildings.” Energy and Buildings 138: 612–620. doi:10.1016/j.enbuild.2016.12.095.
- Coello, C. C., F. S. Hernández, and F. A. Farrera. 1997. “Optimal Design of Reinforced Concrete Beams Using Genetic Algorithms.” Expert Systems with Applications 12 (1): 101–108. doi:10.1016/S0957-4174(96)00084-X.
- Deb, K., A. Pratap, S. Agarwal, and T. Meyarivan. 2002. “A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II.” IEEE Transactions on Evolutionary Computation 6 (2): 182–197. doi:10.1109/4235.996017.
- Ferreira, C. C., M. H. F. M. Barros, and A. F. M. Barros. 2003. “Optimal Design of Reinforced Concrete T-sections in Bending.” Engineering Structures 25 (7): 951–964. doi:10.1016/S0141-0296(03)00039-7.
- Ferreira, F. P. V., R. Shamass, V. Limbachiya, K. D. Tsavdaridis, and C. H. Martins. 2022. “Lateral–torsional Buckling Resistance Prediction Model for Steel Cellular Beams Generated by Artificial Neural Networks (ANN).” Thin-Walled Structures 170 (September 2021): 108592. doi:10.1016/j.tws.2021.108592.
- Hong, W.-K., J.-M. Kim, S.-C. Park, S.-G. Lee, S.-I. Kim, K.-J. Yoon, H.-C. Kim, and J. T. Kim. 2010. “A New Apartment Construction Technology with Effective CO2 Emission Reduction Capabilities.” Energy 35 (6): 2639–2646. doi:10.1016/j.energy.2009.05.036.
- Hong, W.-K. 2020. “Chapter 10 - Artificial-intelligence-based Design of the Ductile Precast Concrete Beams.” In Woodhead Publishing Series in Civil and Structural Engineering, edited by W.-K. B. T.-H. C. P. S. Hong, 427–478. Sawston, Cambridge: Woodhead Publishing. doi:10.1016/B978-0-08-102721-9.00010-8.
- Hong, W.-K., and M. C. Nguyen. 2021. “AI-based Lagrange Optimization for Designing Reinforced Concrete Columns.” Journal of Asian Architecture and Building Engineering 1–15. doi:10.1080/13467581.2021.1971998.
- Hong, W.-K., V. T. Nguyen, and M. C. Nguyen. 2021. “Optimizing Reinforced Concrete Beams Cost Based on AI-based Lagrange Functions”. Journal of Asian Architecture and Building Engineering, no. ja. doi:10.1080/13467581.2021.2007105.
- Hong, W. K., T. A. Le, M. C. Nguyen, and T. D. Pham 2022 . “ANN-based Lagrange optimization for RC circular columns having multi-objective functions.” Journal of Asian Architecture and Building Engineering doi:10.1080/13467581.2022.2064864.
- Hosseinpour, M., Y. Sharifi, and H. Sharifi. 2020. “Neural Network Application for Distortional Buckling Capacity Assessment of Castellated Steel Beams.” Structures 27: 1174–1183. doi:10.1016/j.istruc.2020.07.027.
- Jaeggi, D., G. Parks, T. Kipouros, and J. Clarkson. 2005. A Multi-objective Tabu Search Algorithm for Constrained Optimisation Problems BT - Evolutionary Multi-Criterion Optimization, eds. C. A. C. Coello, A. H. Aguirre, and E. Zitzler., 490–504. Berlin Heidelberg: Springer.
- Jahjouh, M. M., M. H. Arafa, and M. A. Alqedra. 2013. “Artificial Bee Colony (ABC) Algorithm in the Design Optimization of RC Continuous Beams.” Structural and Multidisciplinary Optimization 47 (6): 963–979. doi:10.1007/s00158-013-0884-y.
- Karush, W. (1939). “Minima of Functions of Several Variables with Inequalities as Side Constraints” (M.Sc. thesis). Dept. of Mathematics, Univ. of Chicago, Chicago, Illinois.
- Kaveh, A., and O. Sabzi. 2012. “Optimal Design of Reinforced Concrete Frames Using Big bang-big Crunch Algorithm.” International Journal of Civil Engineering 10 (3): 189–200.
- Kaveh, A., and V. R. Mahdavi. 2019. “Multi-objective Colliding Bodies Optimization Algorithm for Design of Trusses.” Journal of Computational Design and Engineering 6 (1): 49–59. doi:10.1016/j.jcde.2018.04.001.
- Kayabekir, A. E., Z. A. Arama, G. Bekdaş, S. M. Nigdeli, and Z. W. Geem. 2020. “Eco-Friendly Design of Reinforced Concrete Retaining Walls: Multi-objective Optimization with Harmony Search Applications.” Sustainability 12 (15): 6087. doi:10.3390/su12156087.
- Kuhn, H. W., and A. W. Tucker (1951). “Nonlinear Programming”. Proceedings of 2nd Berkeley Symposium. Berkeley: University of California Press. pp. 481–492.
- Lee, M.-S., K. Hong, and S.-W. Choi. nd. “Genetic Algorithm Based Optimal Structural Design Method for Cost and CO2 Emissions of Reinforced Concrete Frames TT - 철근콘크리트 모멘트골조의 비용 및 이산화탄소 배출량을 고려한 유전자알고리즘 기반 구조최적화기법.” Journal of the Computational Structural Engineering Institute of Korea 29 (5): 429–436. doi:10.7734/COSEIK.2016.29.5.429.
- Liu, X., and A. C. Reynolds. 2016. “Gradient-based multi-objective Optimization with Applications to Waterflooding Optimization.” Computational Geosciences 20 (3): 677–693. doi:10.1007/s10596-015-9523-6.
- Marler, R. T., and J. S. Arora. 2004. “Survey of multi-objective Optimization Methods for Engineering.” Structural and Multidisciplinary Optimization 26 (6): 369–395. doi:10.1007/s00158-003-0368-6.
- Martinez-Martin, F. J., F. Gonzalez-Vidosa, A. Hospitaler, and V. Yepes. 2012. “Multi-objective Optimization Design of Bridge Piers with Hybrid Heuristic Algorithms.” Journal of Zhejiang University: Science A 13 (6): 420–432. doi:10.1631/jzus.A1100304.
- MathWorks. 2020b. MATLAB R2020b, Version 9.9.0. Natick, MA: MathWorks.
- Mei, L., and Q. Wang. 2021. “Structural Optimization in Civil Engineering: A Literature Review.” Buildings 11 (2): 1–28. doi:10.3390/buildings11020066.
- Mohd Zain, M. Z. B., J. Kanesan, J. H. Chuah, S. Dhanapal, and G. Kendall. 2018. “A multi-objective Particle Swarm Optimization Algorithm Based on Dynamic Boundary Search for Constrained Optimization.” Applied Soft Computing Journal 70: 680–700. doi:10.1016/j.asoc.2018.06.022.
- Munk, D. J., G. A. Vio, and G. P. Steven. 2015. “Topology and Shape Optimization Methods Using Evolutionary Algorithms: A Review.” Structural and Multidisciplinary Optimization 52 (3): 613–631. doi:10.1007/s00158-015-1261-9.
- Nan, B., Y. Bai, and Y. Wu. 2020. “Multi-objective Optimization of Spatially Truss Structures Based on Node Movement.” Applied Sciences (Switzerland) 10 (6). doi:10.3390/app10061964.
- Nguyen, D. H., and W. K. Hong. 2019. “Part I: The Analytical Model Predicting post-yield Behavior of concrete-encased Steel Beams considering Various Confinement Effects by Transverse Reinforcements and Steels.” Materials 12 (14): 2302. doi:10.3390/ma12142302.
- Nguyen, T.-A., H.-B. Ly, and V. Q. Tran. 2021. “Investigation of ANN Architecture for Predicting Load-Carrying Capacity of Castellated Steel Beams.” Complexity 2021: 6697923. doi:10.1155/2021/6697923.
- Park, H. S., B. Kwon, Y. Shin, Y. Kim, T. Hong, and S. W. Choi. 2013. “Cost and CO2 Emission Optimization of Steel Reinforced Concrete Columns in high-rise Buildings.” Energies 6 (11): 5609–5624. doi:10.3390/en6115609.
- Shaqfa, M., and Z. Orbán. 2019. “Modified parameter-setting-free Harmony Search (PSFHS) Algorithm for Optimizing the Design of Reinforced Concrete Beams.” Structural and Multidisciplinary Optimization 60 (3): 999–1019. doi:10.1007/s00158-019-02252-4.
- Sharifi, Y., A. Moghbeli, M. Hosseinpour, and H. Sharifi. 2020. “Study of Neural Network Models for the Ultimate Capacities of Cellular Steel Beams.” Iranian Journal of Science and Technology, Transactions of Civil Engineering 44 (2): 579–589. doi:10.1007/s40996-019-00281-z.
- Tahmassebi, A., B. Mohebali, A. Meyer‐Baese, and A. H. Gandomi. 2020. “Multiobjective Genetic Programming for Reinforced Concrete Beam Modeling.” Applied AI Letters 1 (1): 1–10. doi:10.1002/ail2.9.
- Yang, X.-S. 2014. “Chapter 14 - Multi-Objective Optimization.” In Nature-Inspired Optimization Algorithms, edited by X.-S. Yang, 197–211. Amsterdam: Elsevier. doi:10.1016/B978-0-12-416743-8.00014-2.
- Yücel, M., G. Bekdaş, S. M. Nigdeli, and A. E. Kayabekir. 2021a. “An Artificial Intelligence-Based Prediction Model for Optimum Design Variables of Reinforced Concrete Retaining Walls.” International Journal of Geomechanics 21 (12): 1–10. doi:10.1061/(asce)gm.1943-5622.0002234.
- Yücel, M., S. M. Nigdeli, A. E. Kayabekir, and G. Bekdaş. 2021b. “Optimization and Artificial Neural Network Models for Reinforced Concrete Members.” In Nature-Inspired Metaheuristic Algorithms for Engineering Optimization Applications, edited by S. Carbas, A. Toktas, and D. Ustun, 181–199. Singapore: Springer Singapore. doi:10.1007/978-981-33-6773-9_9.
- Zhang, Z.-Y., Z. Gifari, Y.-K. Ju, and J. H. Kim (2021). “Multi-objective Optimization of the Reinforced Concrete Beam.” In S. M. Nigdeli, J. H. Kim, G. Bekdaş, and A. Yadav (Eds.), Proceedings of 6th International Conference on Harmony Search, Soft Computing and Applications (pp. 171–178). Springer Singapore.
- Zheng, Y. G., and X. X. Hu (2018). “Multi-objective Optimal Design on Vibration Suppression of Building Structures with Active Mass Damper Based on State Difference Feedback.” Chinese Control Conference, CCC (China), 2018-July,1249–1253. 10.23919/ChiCC.2018.8482723
- Zheng, X., D. Zhou, N. Li, T. Wu, Y. Lei, and J. Shi. 2021. “Self-Regulated Particle Swarm Multi-Task Optimization.” Sensors 21 (22): 7499. doi:10.3390/s21227499.