
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
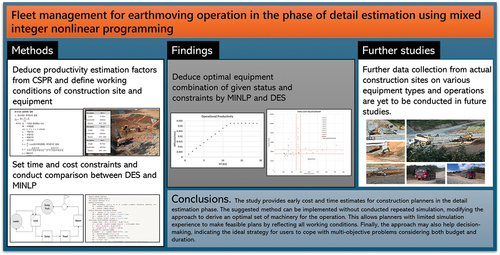
Earthmoving operations generally account for about a quarter of the construction budget in high-way constructions. Feasible planning is thus required for delivering the successful performance of such projects. Selecting the best fleet for the operation is one of the crucial factors affecting both duration and cost. However, owing to changing operating circumstances and the uncertainty of construction projects, this task is yet conducted based on the experience of site managers. The existing literature has witnessed that discrete event simulation (DES) and references such as the construction standard production rate (CSPR) are used to assist the decision-making. Those methods have shown limitations for practical application due to the need for expert knowledge of simulation modeling and time-consuming efforts for data collection. Accordingly, this study proposes a more efficient method of using mixed integer nonlinear programming (MINLP) in multi-objective problems, enabling optimal fleet information derivation based on given circumstances. The proposed method uses the CSPR-based mathematical equations for the consideration of productivity generated by the types and sizes of equipment. A comparative study of the proposed method and a DES approach was given for further discussions.
GRAPHICAL ABSTRACT
1. Introduction
1.1. Background and research objective
Before commencing the construction project, there are many factors for planners to consider regarding resource allocation and task sequences with minimal risk in terms of profitability (Czarnigowska and Sobotka Citation2014). This practice helps support construction planners in the bidding stage to carefully assess the feasibility of a particular project in advance to avoid overestimation or underestimation of a particular plan. Furthermore, the absence of an optimal concrete plan may result in a higher risk of low cost and schedule performance in the operational stage. Construction operations are monitored by site officers, however, may not always be able to observe and check the recorded data at all times (Zhang et al. Citation2021). Existing studies have witnessed this issue and suggested automated monitoring methods (Shehadeh, Alshboul, and Almasabha Citation2024). The lack of machinery planning and monitoring can cause cost and schedule conflicts in construction, particularly in earthmoving. Furthermore, defining constraints in construction operations is crucial to deriving an ideal combination of equipment used in the operation. In particular, those constraints are generally concerned with schedule and budget (Abbasnia, Afshar, and Eshtehardian Citation2008; Czarnigowska and Sobotka Citation2014). Therefore, project managers face optimal fleet selection problems that are crucial in monitoring the duration of the completion of the project.
Several techniques have been employed to deal with this issue. First, the conventional method of incorporating CSPR (Construction Standard Production Rate) of equipment in South Korea allows a planner to forecast the productivity rate and cost of machinery allocation (Jung et al. Citation2009). Significant achievements in investigating appropriate productivity measurement and assessment methods have been acknowledged for acquiring reliable CSPR (Chae et al. Citation2021; E. Kim et al. Citation2023; J. Kim et al. Citation2022; Kwon and Huh Citation2021). This gives planners some insights but is inefficient because planners must verify every production rate and price estimation for each scenario before deciding. In addition, the CSPR cannot mimic the reality of a link system of an operation that involves different kinds of equipment (Ko et al. Citation2022). This could involve uncertainty in estimation. The second approach is estimating the duration and cost of an operation using DES (Discrete Event Simulation) because a simulation can visit and analyze more functional scenarios in the sensitivity analysis (AbouRizk Citation2010). Therefore, to some extent, it is helpful for planners to oversee optimal sets that can be employed to solve time-cost constraints. On the other hand, this technique will require planners to be familiar with simulation techniques and cause repetitive simulation works when dealing with various combinations of equipment availability and working conditions. Moreover, the technique is resource-intensive regarding data collection of measuring event times as input for the simulation, such as GPS data or CCTV. Performing the technique during the early stage of the project is inefficient.
Similarly, the integration of optimization algorithms, such as GA (Genetic Algorithm) and MINLP (Mixed Integer Nonlinear Programming) with DES (Discrete Event Simulation), has also been employed to find optimal sets of equipment in operation. Most of these concerns are about the overall sequence of different operations in the critical path but may overlook the importance of a particular operation. This technique requires detailed data that may not be achievable during the detail estimation stage. Moreover, planners need a strategy to deal with rapid change to generate different plans because working operations constantly alter from one site to another (Lin et al. Citation2012).
Therefore, this research evaluated a framework for finding the optimal set of equipment in a construction operation by incorporating CSPR and MINLP. This research study is expected to:
assist the planner in the detail estimation stage where data availability is limited,
overcome the limitation of CSPR by embodying the operation systematically using DES to derive a more accurate estimation of total cost and duration, and
time-efficiently provide ideal sets of equipment without repetitive simulation work in DES.
It is expected that the suggested method and discussion, especially the implementation of GEKKO (a python library for solving MINLP) algorithm, fills a gap in the literature that deal with fleet optimization in earthmoving operations. The study will serve as a preliminary study for fleet optimization using multi-objective optimization in other operations also.
1.2. Research methods and scopes
Earthwork is one of the most common operations in a construction project, mostly conducted under many circumstances involving significant uncertainty. In particular, earthmoving machinery accounts for approximately one-quarter of the overall construction budget in construction projects (W. L. Hare, Koch, and Lucet Citation2011; Parente, Cortez, and Correia Citation2015). The number is estimated to be more than 30% for highway infrastructure projects (Alshboul, Shehadeh, Mamlook, et al. Citation2022). As mentioned, because earthmoving is conducted before other tasks, it must carefully consider the resources required to accomplish it within a specific period and limited budget (H. Kim et al. Citation2019; Sherafat et al. Citation2020). Owing to such constraints, seeking the optimal plan remains challenging, particularly where planners must perform cost estimation and scheduling. Therefore, selecting the ideal plan for equipment in each operation in preplanning will help planners to avoid adverse impacts on the overall schedule in the construction phase because earthwork must be completed before the commencement of other activities on site (H. Kim et al. Citation2019; Marzouk and Moselhi Citation2004; Morley, Lu, and AbouRizk Citation2013; Shehadeh et al. Citation2022).
CSPR (Construction Standard Production Rate) is the reference book used in South Korea for cost estimations. The CSPR is used in this study since it is the most used reference in South Korea for initial cost estimations. The CSPR provides the necessary productivity calculation for each equipment used in the earthmoving operations. However, this information is given only to individual equipment and not to an operation as a whole which generally includes activities such as “LOADING”, “HAULING”, “EXCAVATING.
The research proposed this method based on the addressed limitations of using conventional methods such as CSPR and DES in detailed estimation for optimal fleet selection when there is limited available data and a time-consuming complex process. To simplify the problem of estimating, MINLP is suggested. The MINLP mathematical formula model of CSPR takes into account several parameters such as productivity, total estimated cost and durations, some initial constraints, planned cost and duration, earth quantity to be moved, and the number and types of construction equipment to be allocated. In the optimization procedure, the decision variables are the combination of the number of loaders and trucks with their specification in terms of capacity. In other words, MINLP will seek for the optimal combination of loader and truck that minimizes both duration and cost for the earthmoving planning in an accurate and time-efficient way. Lastly, to solve MINLP, GEKKO python library was employed to model all the required mathematical relationships between each necessary variable. presents the details of the proposed methodology, which consists of three important steps.
Figure 1. Research methodology diagram.
The first step is obtaining a reference from Korea CSPR for earthmoving operation. To estimate the productivity, it is necessary to identify the important aspects, such as working circumstances, equipment configurations, working capacity, and mathematical relationship for productivity estimation of each piece of equipment from CSPR. Thus, this can be considered the process of deriving the event time such as load, travel, return and dump time. The second step is the process of modeling the MINLP in GEKKO python library. This python package provides several types of built-in optimization problem solvers for mixed-integer and differential algebraic equations, which include several modes of operation for nonlinear predictive control (Beal et al. Citation2018). All of the mathematical relationships in step 1 are used to model every component for MINLP optimization. The main goal is to correctly model the system of mathematical equations in terms of logical variables and intermediate variables to solve for operational productivity, total estimated cost, and total estimated duration. Meanwhile, in MINLP, it requires a decision variable or, in other words, solution variables that are used to determine whether the objective function is optimized. In this case, the decision variables are the discrete variables of the number and the specification of loaders and dump trucks. The literature reviews discuss the utilization of GEKKO in solving optimization problems. Furthermore, the model requires users to provide some inputs, such as working conditions, the maximal range of equipment, and constraints, such as the total duration and cost. After running the MINLP optimization, the algorithm will search for the optimal sets of equipment for the targeted operation plan. After running the model, the output will include a combination of the number and type of loaders and dump trucks, total estimated cost and total estimated duration. In the third step of the proposed method is the case analysis. This procedure is conducted to validate the MINLP model with DES approach. The optimal result of the total cost, total duration, and sets of equipment obtained from MINLP is compared with the ones from DES, and the error metrics in the discussion section. Further details of MINLP model process are discussed in section 4.2 to better understand the application of MINLP in real case scenario.
2. Literature review
2.1. Conventional method approach
The duration and cost of a particular operation can be estimated through a computational process that can be performed through simulation techniques for productivity analysis. On the other hand, this technique requires event time input to model the whole process. GPS was used in many studies to collect all that information for simulation. Comparative studies of productivity analysis by different means of earthmoving productivity measurements were illustrated, and the utilization of GPS data in the simulation technique was also investigated to validate the performance of the GPS-based simulation technique through WebCYCLONE (S. W. Han, Lee, and Halpin Citation2005; S. Han et al. Citation2006). Deterministic model-based, queuing theory-based, and simulation-based were studied. As a result, the simulation technique with input generated from the GPS outperformed the others and accurately measured the actual productivity of a particular earthwork operation (S. Han Citation2010). Alshibani and Moselhi (Citation2016) presented a productivity-based method to estimate the cost and time of earthmoving in which GPS data are required to collect sufficient data before investigating each equipment’s activity event time and proceed to model the whole operating process for predicting the cost and duration of a given plan. An overarching tracking-technology-independent framework was proposed to track new locations and other details of equipment movements to modify the simulation model. The modified simulation was then used for sensitivity analysis to study resource combinations (Vahdatikhaki and Hammad Citation2014). Similarly, efforts to measure the event time of the equipment activity in the construction process have been long investigated. An algorithm to access logs of dump trucks by analyzing videotapes at the construction site was developed and used to construct an earthwork report and improve the potential of saving the cost and time of earthworks with an updated allocation plan according to the numbers of trucks (H. Kim et al. Citation2019). These studies concentrated on using real-time data for planning, which could be a considerable obstacle for planners in the preplanning stage when the operation has not started. As a result, the proposed method incorporated CSPR-based event time as input in the simulation model. In solving time-cost tradeoff problems with multiple constraints, various optimization methods are employed together with simulation. These studies solely concentrated on estimating cost and duration and are free of constraints in terms of time and cost.
2.2. Optimization and machine learning approach
The existing literature has witnessed the efficacy of machine learning models in various prediction purposes (Al-Shboul et al. Citation2023, Citation2023; Almasabha, Al-Shboul, et al. Citation2023; Alshboul, Shehadeh, Mamlook, et al. Citation2022; Kim and Kim Citation2023; Park and Cha Citation2023). Al-Shboul et al. (Citation2023) stated the difficulty of using traditional regression methods for quantification of complex content as the correlation between soil radon exhalation rate and its natural radionuclide. The study suggested an ANN (Artificial Neural Networks) and GEP (Gene Expression Programming) approach to cope with such difficulty. Almasabha et al. (Citation2023) conducted a study on predicting the shear strength of synthetic fiber-reinforced concrete beams without stirrups using machine learning methods such as LightGBM, XGBoost, and Gene Expression. Al-shboul et al. (Citation2023) also conducted a comparative study of different machine learning methods such as Light Gradient Boosting Machine (LightGBM), Extreme Gradient Boosting (XGBoost) and Gene Expression (GEP) to predict the shear strength values of stirrups-free Steel Fiber Reinforced Concrete (SFRC) deep beams. Alshboul et al. (Citation2022) stated the importance of accurate quantification of liquidated damages in highway construction projects and thus conducted a study for predicting liquidated damages in high-way construction projects by using ensemble machine learning technique that combines algorithms of the Extreme Gradient Boosting, Categorical Boosting, k-Nearest Neighbor, Light Gradient Boosting Machine, Artificial Neural Network and Decision Tree. Almadi et al. (Citation2022) highlighted the traffic collision issue on highways due its influence on delaying the sustainable development of society. The study identified the factors contributing to highway user crashes and aimed to find the relationship between the change in the speed limit and the number of crashes. The study utilized a multi-user driving simulator and a multinomial logistic regression (MNL) model has been investigated and crash modification factors were developed. Many techniques have been used to assist simulation techniques and deal with earthmoving under time and cost constraints, but mixed integer programming, genetic algorithm (GA), and dynamic optimization algorithms are most well-known for solving multi-objective problems (Falcão, Nobre Júnior, and Prata Citation2016). The task of finding the most cost-effective alternatives in construction projects has also been suggested by numerous studies. Almasabha et al. (Citation2023) conducted a study to cope with the limitation of experimentally assessing pipeline efficiency with high soil fill depth by using a dependable FEA (Finite Element Analysis). The results show that the suggested algorithm can successfully deduce the lowest required value of steel reinforcement.
A mixed integer program is an excellent technique for solving multi-objective problems. A previous study incorporated mixed integer linear programming (MILP) to optimize earthwork operation in road design to save cost for most road designs by considering the removal of physical blocks in the process beyond the scope of linear programming (W. L. Hare, Koch, and Lucet Citation2011). MILP was used to find optimal vertical alignment considering blocks and side-slopes in road work (W. Hare, Lucet, and Rahman Citation2015). Another study was introduced by implementing MILP to optimize temporary haul road layout, assist the earthmoving operation, and improve construction performance (Yi and Lu Citation2019). MILP was used to solve a multi-objective problem in sew networks, pipe purchase costs, pipe-layering, and manhole construction under various constraints (Safavi and Geranmehr Citation2017). In terms of whole schedule planning, which involves numerous activity sequences, cost objective function, the relationship between activity, start and finish time, and other factors as constraints, could also be modeled in MINLP. The model could yield the precise optimal cost of the production process with associated resource constraints (Klanšek Citation2019). On the other hand, many researchers have also studied the integration of GA and DES. A hybrid optimization mechanism based on DES and GA was also developed to derive a near-optimal truck fleet in earthmoving operations and used to aid planners in decision-making to minimize the duration of the process (Hsiao et al. Citation2011). A framework for optimizing earthwork operations using DES and GA was introduced for minimal cost and duration by considering the factors affecting the operation, including machinery availability and their indirect cost (Marzouk and Moselhi Citation2004). Further factors, such as construction site conditions, soil type, and equipment characteristics, were also considered in a study for large-scale earthmoving operations that applied a similar technique (Moselhi and Alshibani Citation2009). Another mechanism developed by Lin et al. (Citation2012) also used GA and DES to manage truck fleets in earthmoving in a single project from the general contractors’ point of view to optimize resource utilization and equipment suitability while meeting the targeted duration and balancing utilization of equipment. These studies depend primarily on historical and real-time measurement data, which are difficult to acquire during the preplanning stage. Recently, however, a mathematical model for earthmoving fleet selection using GA to solve the time-cost tradeoff problem was also investigated. The model was based on the manufacturer handbook and state law for productivity and cost estimation, where the user was required to set constraints regarding equipment number and capacity (Shehadeh et al. Citation2022). On the other hand, the practice of mixed integer programming to solve optimal fleet selection for the earthmoving operation has not been investigated thoroughly. In addition, each study concerning earthmoving focused on monitoring the operation in the construction phase, which appears to overlook the importance of scheduling and budgeting in the preplanning phase when real-time data, such as GPS, is absent. Therefore, the proposed methodology in this research aims to model the earthmoving mathematical model and information derived from CSPR in terms of productivity and cost estimation in mixed integer programming to find an optimal fleet selection regarding the equipment capacity and number under time-cost constraints.
2.3. MINLP in GEKKO
MINLP is an optimization problem where the objective function and constraints contain continuous and discrete variables. In MINLP, some decision variables must be integers, while others are allowed to take continuous values. The solution to a MINLP problem entails determining the values of both the continuous and integer decision variables that minimize the objective function while meeting the constraints (Sahinidis Citation2019). The solution techniques for MINLP problems can be classified broadly into exact and heuristic methods. Exact methods involve solving the problem to optimality using mathematical algorithms, such as branch-and-bound and branch-and-cut. Heuristic methods, however, involve approxima tion algorithms and other techniques to obtain good solutions quickly but without guaranteeing optimality (Morrison et al. Citation2016). GEKKO is a mixed integer and differential algebraic equation optimization software that is used with large-scale solutions for linear, quadratic, nonlinear, and mixed integer programming. Data reconciliation, real-time optimization, dynamic modeling, and nonlinear predictive control are all modes of operation. It integrates with APOPT (Advanced Process Optimization) solvers known for their ability to solve optimization efficiently (Beal et al. Citation2018). The GEKKO python package has been used to solve optimization problems in many industries. GEKKO can solve difficult grid design and control challenges. A set of non-dimensional benchmark examples for grid energy production is presented, as are approaches for solving control problems with sequential and simultaneous solutions to the objective and dynamic constraints (Gates et al. Citation2021). The multi-objective optimization model of multi-pass turning operations to minimize energy, carbon emissions, and production costs was also constructed to deal with sustainable manufacturing aspects using GEKKO and Interior Point Optimizer (Dityarini, Pujiyanto, and Suletra Citation2020). The GEKKO optimization package was also used for a numerical optimization framework in oil production planning problems. The techniques used depicted a high degree of convergence in profit and production line calculation by showing accurate optimal solutions (Alridha, Salman, and Al-Jilawi Citation2022). The development of a realistic Fuel Gas Supply System (FGSS) configuration for ships to reduce accidents and fulfill the emission criteria of the International Maritime Organization was also conducted using MINLP in GEKKO by taking separation distance, deck size, and non-overlapping functions of equipment into account (Nubli, Sohn, and Prabowo Citation2022). Overall, GEKKO optimization has shown excellent performance in solving optimization problems in different industries. Therefore, this study uses the GEKKO algorithm to solve the optimal fleet derivation problem in earthmoving that consists of two pieces of equipment (loader and dump truck) working dynamically with constraints to the total cost, total duration, working conditions, and availability of equipment and its unit cost.
3. Data collection
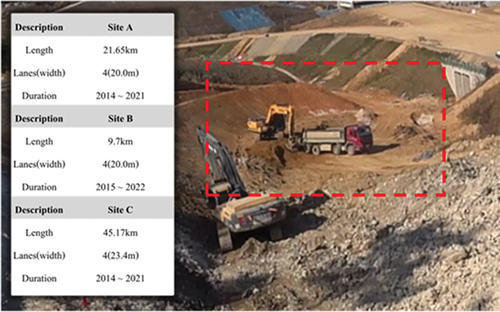
3.1. Earthmoving operation from road construction sites
This operation detail was based on observing an actual construction site CCTV in South Korea from various sites. The study concentrates entirely on the earthwork operation in road construction sites. shows the process of the targeted operation at road construction sites. Based on the data of the input values of the time necessary for each cycle, the simulation model produces production-rate information of the overall processes formed by multiple cycles. The event time necessary for each of the critical activities was calculated using the production capacity of the equipment and the production rate of the process reported in the CSPR to determine the input values of the simulation model. The activities conducted during the recorded earthmoving operation are loading, traveling, dumping, and returning. The event times of each activity was calculated by the capacity of the equipment used in the operation and productivity equations given in the CSPR. Details of such estimations are provided in the below chapters.
Figure 2. CCTV tape of the earthmoving operation.
3.2. CSPR-based event time calculation
The Korea Information & Communication Industry Institute defines the CSPR to represent the amount of labor and equipment operating time required for each activity based on the representative and general construction processes and construction techniques used in the construction of facilities. The CSPR specifies the specifications and operation times of construction equipment needed for the job per unit amount (Son, Hong, and Kim Citation2010). According to the CSPR, the production rate of the loader is determined as in Equationequation (1)(1)
(1) and the production rate of the dump truck as in Equationequation (2)
(2)
(2) .
Based on Equationequations (1(1)
(1) ,Equation2
(2)
(2) ), event times of the activities “LOADING”, “TRAVELING”, “RETURNING” and “DUMPING” are calculated as Equationequations (3
(3)
(3) –Equation6
(6)
(6) ).
where,
hourly production-rate
loader’s bucket capacity
= bucket coefficient
= swell factor
= efficiency
= loader cycle time
where,
= dump truck loading capacity
= load capacity of a truck
= density of soil in natural condition
= volume conversion coefficient for the swell factor
where,
= dump truck’s speed when loaded
= the speed of a dump truck when empty
4. Optimal fleet selection
4.1. DES-based optimal fleet selection
The process from the construction site CCTV was modeled in DES as shown in to examine its productivity. Therefore, sensitivity analysis can be conducted to estimate productivity and the optimal combination of equipment (Soibelman and Kim Citation2002).
Figure 3. DES Model for earthmoving in WebCYCLONE.
Based on the result, it can identify what combination of machinery will yield the most operational productivity and total cost of the case analysis used to validate the performance of mixed integer programming results. The event time of each node is required to formulate the simulation model: loading time, traveling time, returning time, and dumping time. These values can be acquired from the CPSR, which contains information on specifications and operating time for each machinery for a particular operation per unit quantity (Son, Hong, and Kim Citation2010). The derived formula can be extracted as described in .
Table 1. GEKKO modeling variable definition.
Table 2. GEKKO optimization model.
According to this model, sensitivity analysis can be conducted on how the number of trucks and the number of loaders affect the OP (operational productivity). presents an example of a sensitivity analysis of OP according to the number of dump trucks with a fixed number of loaders.
Figure 4. Sample of sensitivity analysis-number of dump trucks.
4.2. MINLP-based for optimal fleet selection
From the result in DES, the OP of the system increases as the NT (number of dump trucks) increases. Therefore, the OP of the system is determined by the productivity of the dump trucks working in a continuous cycle. On the other hand, the OP remained unchanged because of the fixed number of loaders. The operational productivity of the whole system is determined by the productivity of loaders working collaboratively in the system. Therefore, the OP can be estimated as shown in Equationequation (7)(7)
(7) , which is comparable to the value derived from the DES. The total duration and total cost is then can be calculated by Equationequations (8)
(8)
(8) and (Equation9
(9)
(9) ).
where,
NL = number of loaders
NT = number of dump trucks
LF = loader’s unit fixed cost per hour
TF = truck’s unit fixed cost per hour
The problem needs to be modeled using the GEKKO language, where all values are defined by constants, parameters, and variables to conduct a multi-objective problem. The relationship of the Equationequations (1)(1)
(1) - (Equation6
(6)
(6) ), (Equation8
(8)
(8) ) and (Equation9
(9)
(9) ) was modeled as the intermediate variables or equations in the MINLP model. Objective functions are defined to maximize or minimize specific values (Beal et al. Citation2018). In the earthmoving operation case, the GEKKO model was built based on the equations and relationships of each variable, as shown in . The model was then used to accept inputs from the user to derive the optimal sets of solutions that meet the objectives of the model. In this case, the objective function is set to be the standardized value of total time and total cost, which are the goals to be optimized. This value is used to make a fair tradeoff between the duration and cost based on the user’s desired plan and to consider both objectives equally. The objective function is determined as follows:
Table 3. Event time for case analysis.
where,
tdstd = standardized total duration derived from (8)
tcstd = standardized total cost derived from (9)
TDmax: Maximal planed total duration
TDmin: Minimal planed total duration
TCmax: Maximal planed total cost
TCmin: Minimal planed total cost
Therefore, setting the objectives is crucial for finding the optimal sets of equipment in the operation. The users must utilize the parameters efficiently from CSPR and constraints of resource equipment and total costs as inputs if desired in the GEKKO model to derive optimal sets of equipment, including the number and type of each equipment, estimated total duration, and estimated total cost. The pseudocode of the process is illustrated in and the step-by-step of MINLP in GEKKO python library process can be summarized as:
Figure 5. Algorithm pseudo code.
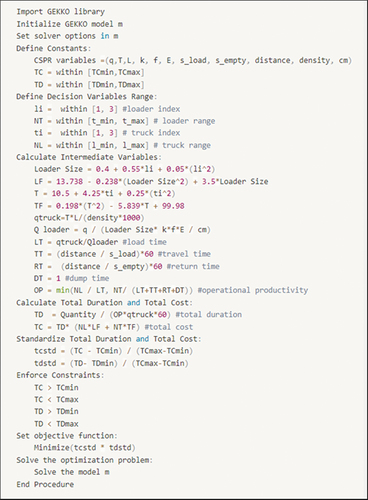
Step1: Construct MINLP model for optimization using GEKKO python library using mathematical formula from CSPR to derive operational productivity of earthmoving, standardizing operation, and objective functions.
Step2: Input information about construction condition based on CSPR.
Step3: Planner’s constraints such as equipment availability and number of equipment range
Step4: Run GEKKO and solve.
5. Comparative studies
This chapter deals with a comparative analysis of a typical earthwork operation that consists of the activities “LOADING” and “HAULING” of soil. The conditions for the assumed scenario are summarized as follows:
Hauling distance: 2 km
Hauling speed of the dump truck when loaded: 7 km/hour
Hauling speed of the dump truck when empty: 8 km/hour
Soil density: 12 kg/m3
Swell factor: 0.87
Bucket coefficient: 1
Loading efficiency: 0.7
Average loading time of one bucket by the loader: 0.98 min
Available sizes of loaders: 1, 1.7, and 2.5 m3
Hourly cost of loaders: 17, 19, 21 USD respectively
Available sizes of trucks: 15, 20, 25.5 ton
Hourly cost of dump trucks: 57, 62.5, 80 USD respectively
Quantity of soil to be hauled: 10000 m3
Project budget range: 35000 ~ 42,000 USD
Project duration range: 250 ~ 300 hours
5.1. DES-based analysis
The DES-based analysis was first carried out to compare the results of the suggested method with that of DES later. As stated in the above chapters, the optimal number of equipment can be derived through DES, however the DES model must be accompanied with new modeling, data collection and evaluation for every new input such as the size of equipment size, hourly cost, hauling distance, soil density, swell factor. Accordingly, in this scenario, 9 cases were analyzed by using the DES approach considering the combinations of equipment sizes listed above. According to Equationequations (3)(3)
(3) , (Equation4
(4)
(4) ), and (Equation5
(5)
(5) ) from the above case, the event times, such as loading, traveling, dumping, and returning time can be derived. The result of each event time can be identified as described in , and sensitivity analysis will be conducted according to the number of trucks. In this case, however, the DES model needs to be simulated nine times, which are the possible cases of equipment combinations derived from different types of trucks and loaders. The simulation is conducted through WebCYCLONE, and sensitivity analysis is then performed according to the number of dump trucks. shows the result of operational productivity derived from the simulation, while is the conversion to estimation productivity. The total duration and cost of the nine cases are illustrated in . Although case nine has the highest productivity rate, it does not guarantee the optimal total time and cost of the operation.
Table 4. Operation productivity derived from DES (cycle/min).
Table 5. Estimation productivity derived from DES (m3/min).
Table 6. Total duration derived from DES (hrs).
Table 7. Total cost derived from DES (USD).
5.2. Mixed integer programming-based analysis
As stated above, variables in terms of integers are required for the proposed model. Accordingly, Equationequations (13)(13)
(13) –(Equation16
(16)
(16) ) were fitted in order to transform loader bucket size, loader hourly cost, dump truck capacity, and dump truck hourly cost values to integer values.
where li = 1, 2, and 3 for the loader = 1, 1.7, and 2.5 m3, respectively
where ti = 1, 2, and 3 (11) for T = 15, 20, and 125.5 ton, respectively
In this case, an integer variable of the loader index (li) and truck index (ti) will be used to modify the loaders and trucks available. Regarding the unit price of each equation, the loader size is needed to determine each one. The following relationship can be obtained based on the given study case, as expressed in Equationequations (13)(13)
(13) –(Equation16
(16)
(16) ). For example, if li = 1, the loader size = 1 m3, and the hourly unit cost of 1 m3 size loader is 17 USD. These relationships (13)–(16) serve as intermediate variables that show the relationship between the unit cost and the type of equipment. For the given case above, the CSPR parameter values can be set accordingly, and the maximal range of loaders is 1 and the maximal range of the number of trucks is 5. The input parameters of the MINLP analysis of the case study are shown in and they represent the same conditions that were carried out in the DES approach.
Table 8. Inputs for MINLP in case analysis.
As shown in , after giving the inputs into MINLP model, steady state optimization continuously iterates until the solver finds a satisfying solution or until the stop requirements, such as maximum number of iterations, convergence tolerance, and so on, are satisfied. The solver will seek an optimal solution by iteratively exploring the search region, modifying variables, and attempting to minimize or maximize its objective function while adhering to all restrictions. Consequently, it suggests an optimal set that suits the user’s plan, including equipment’s type and number as well as estimated total cost and duration.
Figure 6. MINLP solver.
5.3. Comparative analysis and discussion
The scatter plot in illustrates the time cost relationship of each case of equipment combination derived from the DES simulation. DES can guarantee more reliable productivity even under uncertain conditions. In the preplanning stage, however, there is insufficient data to form a distribution of every event time instead of using a deterministic value derived from CSPR. In this case, the users can foresee the estimated total cost and duration of all possible conditions after multiple simulations. A plot of the time cost relationship can provide insight to users into which combination of equipment can guarantee the global minimum. Case 8, with one loader and four dump trucks, yielded the most feasible result with a total cost of 37,578 USD and a total duration of approximately 278.36 hours, as shown in .
Figure 7. Time-cost relationship of case analysis.
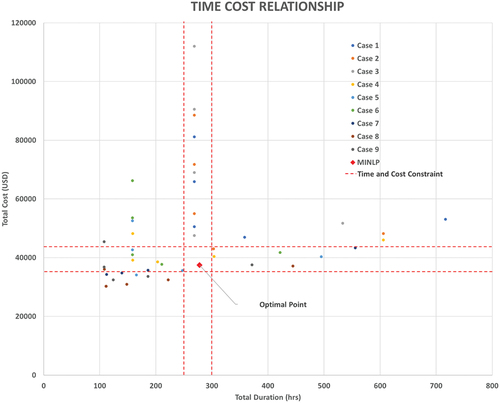
As mentioned in the previous chapters, finding the optimal combination without multiple simulations is yet considered a challenging task for planners due to the difficulty of modeling and time-consuming tasks to be carried out. The proposed method can also capture the whereabouts of the optimal tradeoff position in the graph derived from DES simulation.
A multi-objective optimization approach using GEKKO was utilized in this paper. The mixed integer program-based method can indicate the type of equipment combination yielding the minimum tradeoff between total cost and total duration effectively. Compared to the result derived from DES, the proposed GEKKO-based model could approximate a similar total cost of 37,490 USD and a total duration of approximately 277.92 hours and suggest a combination of (NL = 1, Loader Type = 2.0 m3 , NT = 1, T = 15.0 ton). The DES uses a queuing system approach to estimate productivity, while the GEKKO model works on mathematical formulae. According to , the error of the total duration and cost are relatively below 0.3%.
Table 9. Case analysis result comparison.
The equations given in the CSPR for the calculation of productivity based on equipment type and size, swell factor of soil, and job efficiency were used for the optimization algorithm. This trial was also not conducted in the existing literature. In conclusion, on the academic point of view, this study shows which optimization algorithm is suitable for the purpose of optimizing equipment combination (in this case, deriving optimal vehicle information) at a construction site where data collection is extremely limited. This study presents preliminary steps that illustrate a specific implementation example of the applied GEKKO algorithm. In addition, the proposed methods can serve as useful references for construction engineers who often conduct such operations according to their experience, which could sometimes lead to unintentional cost overruns or even delays in the industrial point of view.
6. Conclusions
Operation planning in the detail estimation stage plays a vital role in determining the success of a construction. The crucial part is budget and scheduling problems in every operation that planners usually encounter when selecting the ideal set of equipment problems to deal with certain circumstances in the project characteristics. This research paper proposed a method that could efficiently find the optimal sets of equipment to estimate the best plan accurately compared to the conventional technique, which employs DES as a tool. The technique targets the earthmoving operation because of the complexity of equipment dynamically working together and accounts for most of the budget of the whole project. Therefore, with a proper estimation of earthmoving operation, there is more likelihood of improved cost and schedule performance during the operational stage and accurate bidding estimation for the profitability of the contractors.
Conventionally, CSPR is preferred when making a particular estimation with a lack of real data in construction sites. On the other hand, CSPR cannot estimate the productivity of a link system where two or more pieces of equipment work together. Therefore, CSPR must be modified to derive important factors, such as the event time and equipment configuration used as input for DES to estimate the productivity of an earthmoving system. Furthermore, the DES technique can be adapted to estimate the productivity of the entire operation, which can assist planners in estimating the overall cost and time required to complete the process. However, this practice requires planners to be familiar with simulation techniques and the effort to simulate all possible equipment combinations. According to the result section, integrating mixed integer programming with CSPR can effectively estimate the total cost and total duration of the whole project and suggest an optimal set of equipment with a relatively small error (<0.3%).
As stated above, the study aimed to use estimation equations given in the CSPR as part of the optimization process of GEKKO. Such a trial was not found in the existing literature and will serve as a preliminary study for implementing multi-objective optimization algorithms for fleet management in the construction management field not only for earthmoving but for other operations also. In an industrial point of view, site engineers can use this method as a reference tool for estimation purposes where their experience is generally the only source of information that can be used. Such estimations sometimes could lead to cost overruns and delays. Overall, the study provides several critical elements. The study provides early cost and time estimates for construction planners in the detail estimation phase. Regardless of uncertain working conditions of earthmoving when real data is not accessible, planers may still be able to efficiently estimate the entire cost and length of a particular operation and cope with the issue. Second, even without a repeated simulation, modifying the approach to derive an optimal set of machinery for the operation is still possible and reliable. This allows planners with limited simulation experience to make feasible plans by reflecting all working conditions. Finally, while resource or budget restrictions are unavoidable in construction planning, the approach may also help decision-making, indicating the ideal strategy for users to cope with multi-objective problems.
Lastly, in addition to earthmoving, the concept can be applied to other operations that need the interaction of several machines or laborers. Considering the limitations of this method, spline equations must be derived in modeling to provide correct results. Furthermore, modification is required if the application differs from CSPR and the availability and unit price of equipment in Korea because the MINLP model is confined to equipment types and hourly unit prices. Before utilizing the strategy, further data on the equipment types and prices must be studied and updated. Future studies will be needed to increase the generality of the model in terms of equipment kinds and unit pricing.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Abbasnia, R., A. Afshar, and E. Eshtehardian. 2008. “Time-Cost Tradeoff Problem in Construction Project Management, Based on Fuzzy Logic.” Journal of Applied Sciences 8 (22): 4159–4165. https://doi.org/10.3923/jas.2008.4159.4165.
- AbouRizk, S. 2010. “Role of Simulation in Construction Engineering and Management.” Journal of Construction Engineering and Management 136 (10): 1140–1153. https://doi.org/10.1061/(ASCE)CO.1943-7862.0000220.
- Almadi, A. I., R. E. Al Mamlook, I. Ullah, O. Alshboul, N. Bandara, and A. Shehadeh. 2022. “Vehicle Collisions Analysis on Highways Based on Multi-User Driving Simulator and Multinomial Logistic Regression Model on US Highways in Michigan.” International Journal of Crashworthiness 28 (6): 770–785. https://doi.org/10.1080/13588265.2022.2130608.
- Almasabha, G., K. F. Al-Shboul, A. Shehadeh, and O. Alshboul. 2023. “Machine Learning-Based Models for Predicting the Shear Strength of Synthetic Fiber Reinforced Concrete Beams without Stirrups.” Structures 52:299–311. https://doi.org/10.1016/j.istruc.2023.03.170.
- Almasabha, G., A. Shehadeh, O. Alshboul, and O. Al Hattamleh. 2023. “Structural performance of buried reinforced concrete pipelines under deep embankment soil.” Construction Innovation. https://doi.org/10.1108/CI-10-2021-0196.
- Alridha, A. H., A. M. Salman, and A. S. Al-Jilawi. 2022. “Numerical Optimization Approach for Solving Production Planning Problem Using Python Language.” Central Asian Journal of Mathematical Theory and Computer Sciences 3 (6): 6–15.
- Al-Shboul, K. F., G. Almasabha, A. Shehadeh, and O. Alshboul. 2023. “Exploring the Efficacy of Machine Learning Models for Predicting Soil Radon Exhalation Rates.” Stochastic Environmental Research and Risk Assessment 37 (11): 4307–4321. https://doi.org/10.1007/s00477-023-02509-x.
- Alshboul, O., A. Shehadeh, R. E. A. Mamlook, G. Almasabha, A. S. Almuflih, and S. Y. Alghamdi. 2022. “Prediction liquidated damages via ensemble machine learning model: Towards sustainable highway construction projects.” Sustainability 14 (15): 9303. https://doi.org/10.3390/su14159303.
- Alshboul, O., A. Shehadeh, O. Tatari, G. Almasabha, and E. Saleh. 2022. “Multi-Objective and Multivariable Optimization for Earthmoving Equipment.” Journal of Facilities Management 22 (1): 21–48. https://doi.org/10.1108/JFM-10-2021-0129.
- Alshibani, A., and O. Moselhi. 2016. “Productivity Based Method for Forecasting Cost & Time of Earthmoving Operations Using Sampling GPS Data.” Journal of Information and Technology in Construction 21 (3): 39–56.
- Beal, L. D., D. C. Hill, R. A. Martin, and J. D. Hedengren. 2018. “Gekko optimization suite.” Processes 6 (8): 106. https://doi.org/10.3390/pr6080106.
- Chae, Y., M. Park, J. Cho, J. Lee, S. Joo, and Y. Hong. 2021. “Causal Loop Diagram for the Relation Between Degree of Field Safety Management and Productivity Based on Effectiveness Metrics: Focusing on Plumbing Work in Mega Project.” Korean Journal of Construction Engineering and Management 22 (2): 12–20.
- Czarnigowska, A., and A. Sobotka. 2014. “Estimating Construction Duration for Public Roads During the 8. Preplanning Phase.” Journal of Engineering, Project, and Production Management 4 (1): 26–35. https://doi.org/10.32738/JEPPM.201401.0004.
- Dityarini, A., E. Pujiyanto, and I. W. Suletra. 2020. “Multi-Objective Optimization Model of Multi-Pass Turning Operations to Minimize Energy, Carbon Emissions, and Production Costs.” Jurnal Teknik Industri 21 (2): 213–224. https://doi.org/10.22219/JTIUMM.Vol21.No2.213-224.
- Falcão, V. A., E. F. Nobre Júnior, and B. D. A. Prata. 2016. “Optimization Techniques Applied to Earthmoving and Highway Construction: A Survey.” International Review of Civil Engineering (IRECE) 7 (5): 137. https://doi.org/10.15866/irece.v7i5.10294.
- Gates, N. S., D. C. Hill, B. W. Billings, K. M. Powell, and J. D. Hedengren. 2021 “Benchmarks for Grid Energy Management with Python Gekko.” 2021 60th IEEE Conference on Decision and Control (CDC), Austin, Texas, USA: 4868–4874. IEEE.
- Han, S. 2010. “Productivity Analysis Comparison of Different Types of Earthmoving Operations by Means of Various Productivity Measurements.” Journal of Asian Architecture and Building Engineering 9 (1): 185–192. https://doi.org/10.3130/jaabe.9.185.
- Han, S. W., S. Y. Lee, and D. W. Halpin. 2005. “Productivity Evaluation of the Conventional and GPS-Based Earthmoving Systems Using Construction Simulation.” Construction Research Congress 2005, San Diego, California, USA: Broadening Perspectives: 1–9.
- Han, S., S. Lee, T. Hong, and H. Chang. 2006. “Simulation Analysis of Productivity Variation by Global Positioning System (GPS) Implementation in Earthmoving Operations.” Canadian Journal of Civil Engineering 33 (9): 1105–1114. https://doi.org/10.1139/l05-124.
- Hare, W. L., V. R. Koch, and Y. Lucet. 2011. “Models and Algorithms to Improve Earthwork Operations in Road Design Using Mixed Integer Linear Programming.” European Journal of Operational Research 215 (2): 470–480. https://doi.org/10.1016/j.ejor.2011.06.011.
- Hare, W., Y. Lucet, and F. Rahman. 2015. “A Mixed-Integer Linear Programming Model to Optimize the Vertical Alignment Considering Blocks and Side-Slopes in Road Construction.” European Journal of Operational Research 241 (3): 631–641. https://doi.org/10.1016/j.ejor.2014.08.035.
- Hsiao, W. T., C. T. Lin, H. T. Wu, and T. M. Cheng. 2011. ”A Hybrid Optimization Mechanism Used to Generate Truck Fleet to Perform Earthmoving Operations.” Road Materials and New Innovations in Pavement Engineering 151–159. Geotechnical Special Publication. https://doi.org/10.1061/47634(413)20.
- Jung, D. K., Y. H. Tae, B. R. Ahn, and Y. H. Cho. 2009. ““A Study on the Standard of Cost Estimation in the Construction of Pavement and Maintenance.” International Journal of Highway Engineering 11 (1): 85–94.
- Kim, H., Y. Ham, W. Kim, S. Park, and H. Kim. 2019. “Vision-Based Nonintrusive Context Documentation for Earthmoving Productivity Simulation.” Automation in Construction 102:135–147. https://doi.org/10.1016/j.autcon.2019.02.006.
- Kim, H. J., and H. S. Kim. 2023. ”A Study on the Development of Construction Budget Estimating Model for Public Office Buildings based on Artificial Neural Network.” Korean Journal of Construction Engineering and Management 24 (5): 22–34. https://dx.doi.org/10.6106/KJCEM.2023.24.5.022.
- Kim, E., J. Kim, S. Joo, C. Ahn, and M. Park. 2023. “A Method of Calculating Baseline Productivity by Reflecting Construction Project Data Characteristics.” Korean Journal of Construction Engineering and Management 24 (3): 3–11.
- Kim, J., I. Yoon, M. Jung, S. Joo, S. Park, Y. Hong, and M. Park. 2022. “Establishment of Measurement Standards for Productivity Assessment in Construction Project.” Korean Journal of Construction Engineering and Management 23 (3): 3–12.
- Klanšek, U. 2019. “Cost Optimization of Project Schedules Under Constrained Resources and Alternative Production Processes by Mixed-Integer Nonlinear Programming.” Engineering, Construction & Architectural Management 16 (10): 2474–2508. https://www.emerald.com/insight/content/doi/10.1108/ECAM-01-2019-0013/full/html.
- Ko, Y., K. Ngov, J. Noh, Y. Kim, and S. Han. 2022. “Discrete Event Simulation Based Equipment Combination Optimization Method - Based on Construction Equipment Performance Estimation of the Construction Standard Production Rate Korean.” Korean Journal of Construction Engineering and Management 23 (6): 21–29.
- Kwon, J., and Y. Huh. 2021. “Productivity Analysis of Reinforced Concrete Works and Tower Crane Working Ratio for High-Rise Apartment Buildings.” Korean Journal of Construction Engineering and Management 22 (1): 55–62.
- Lin, C. T., M. Hsie, W. T. Hsiao, H. T. Wu, and T. M. Cheng. 2012. “Optimizing the Schedule of Dispatching Earthmoving Trucks Through Genetic Algorithms and Simulation.” Journal of Performance of Constructed Facilities 26 (2): 203–211. https://doi.org/10.1061/(ASCE)CF.1943-5509.0000219.
- Marzouk, M., and O. Moselhi. 2004. “Multi-Objective Optimization of Earthmoving Operations.” Journal of Construction Engineering and Management 130 (1): 105–113. https://doi.org/10.1061/(ASCE)0733-9364(2004)130:1(105).
- Morley, D., M. Lu, and S. AbouRizk. 2013, December. “Utilizing simulation derived quantitative formulas for accurate excavator hauler fleet selection.” 2013 Winter Simulations Conference (WSC) Washington D.C., USA: 3018–3029. IEEE.
- Morrison, D. R., S. H. Jacobson, J. J. Sauppe, and E. C. Sewell. 2016. “Branch-And-Bound Algorithms: A Survey of Recent Advances in Searching, Branching, and Pruning.” Discrete Optimization 19:79–102. https://doi.org/10.1016/j.disopt.2016.01.005.
- Moselhi, O., and A. Alshibani. 2009. “Optimization of Earthmoving Operations in Heavy Civil Engineering Projects.” Journal of Construction Engineering and Management 135 (10): 948–954. https://doi.org/10.1061/(ASCE)0733-9364(2009)135:10(948).
- Nubli, H., J. M. Sohn, and A. R. Prabowo. 2022. “Layout Optimization for Safety Evaluation on LNG-Fueled Ship Under an Accidental Fuel Release Using Mixed-Integer Nonlinear Programming.” International Journal of Naval Architecture and Ocean Engineering 14:10044. https://doi.org/10.1016/j.ijnaoe.2022.100443.
- Parente, M., P. Cortez, and A. G. Correia. 2015. “An Evolutionary Multi-Objective Optimization System for Earthworks.” Expert Systems with Applications 42 (19): 6674–6685. https://doi.org/10.1016/j.eswa.2015.04.051.
- Park, D. S., and H. S. Cha. 2023. ”A Developing a Machine Leaning-Based Defect Data Management System For Multi-Family Housing Unit.” Korean Journal of Construction Engineering and Management 24 (5): 35–43. https://dx.doi.org/10.6106/KJCEM.2023.24.5.035.
- Safavi, H., and M. A. Geranmehr. 2017. “Optimization of Sewer Networks Using the Mixed-Integer Linear Programming.” Urban Water Journal 14 (5): 452–459. https://doi.org/10.1080/1573062X.2016.1176222.
- Sahinidis, N. V. 2019. “Mixed-integer nonlinear programming 2018.” Optimization and Engineering 20 (2): 301–306. https://doi.org/10.1007/s11081-019-09438-1.
- Shehadeh, A., O. Alshboul, and G. Almasabha. 2024. “Slope displacement detection in construction: An automated management algorithm for disaster prevention.” Expert Systems with Applications 237:121505. https://doi.org/10.1016/j.eswa.2023.121505.
- Shehadeh, A., O. Alshboul, O. Tatari, M. A. Alzubaidi, and A. H. E. S. Salama. 2022. “Selection of Heavy Machinery for Earthwork Activities: A Multi-Objective Optimization Approach Using a Genetic Algorithm.” Alexandria Engineering Journal 61 (10): 7555–7569. https://doi.org/10.1016/j.aej.2022.01.010.
- Sherafat, B., C. R. Ahn, R. Akhavian, A. H. Behzadan, M. Golparvar-Fard, H. Kim, and E. R. Azar. 2020. “Automated Methods for Activity Recognition of Construction Workers and Equipment: State-Of-The-Art Review.” Journal of Construction Engineering and Management 146 (6): 03120002. https://doi.org/10.1061/(ASCE)CO.1943-7862.0001843.
- Soibelman, L., and H. Kim. 2002. “Data Preparation Process for Construction Knowledge Generation Through Knowledge Discovery in Databases.” Journal of Computing in Civil Engineering 16 (1): 39–48. https://doi.org/10.1061/(ASCE)0887-3801(2002)16:1(39).
- Son, C., S. Hong, and H. Kim. 2010. “Strategies for Improving a Measurement System of Standard Unit Productivity Data on Construction Projects.” Architectural Institute of Korea 26 (6): 157–166.
- Vahdatikhaki, F., and A. Hammad. 2014. “Framework for Near Real-Time Simulation of Earthmoving Projects Using Location Tracking Technologies.” Automation in Construction 42:50–67. https://doi.org/10.1016/j.autcon.2014.02.018.
- Yi, C., and M. Lu. 2019. “Mixed-Integer Linear Programming–Based Sensitivity Analysis in Optimization of Temporary Haul Road Layout Design for Earthmoving Operations.” Journal of Computing in Civil Engineering 33 (3): 04019021. https://doi.org/10.1061/(ASCE)CP.1943-5487.0000838.
- Zhang, Y. G., J. Tang, Z. Y. He, J. Tan, and C. Li. 2021. “A Novel Displacement Prediction Method Using Gated Recurrent Unit Model with Time Series Analysis in the Erdaohe Landslide.” Natural Hazards 105 (1): 783–813. https://doi.org/10.1007/s11069-020-04337-6.