
ABSTRACT
Intact pavement markings organize the utilization of the pavement surface area, increase the road capacity, and improve traffic safety. However, deterioration occurring over the service life will lead to traffic safety hazards. A detailed inspection is regarded as the central tenet of pavement marking management. Conventional manual assessment approaches are time-consuming, qualitative, and argued to be subjective. Thus, cost reduction, quantitative analysis, and automatization have been the focus of research. Unmanned Aerial Vehicle (UAV) platform has been studied wildly in civil tasks due to its low cost and high maneuverability. A UAV-based platform was developed in this research to address the inefficiency, access limitations, and image processing of existing road marking inspection systems. In this research, the resolution of the image is 5472 × 3080 pixels and is captured with a fixed focal length of 8.8 mm. Given intensity differences between pixels of paintings and asphalt backgrounds, the pixels belonging to painting regions are classified using the K-mean clustering algorithm. After detecting all parking lines from images, the Otsu method was employed to determine the threshold of 0.9 as the quantitative indicator of painting quality. The UAV-based platform exhibits expected performance in assessing the pavement markings in a parking area. Future research will explore the deployment in city-scale applications.
1. Introduction
Pavement markings are regarded as a crucial element in securing the safe operation of road networks (Bahar et al. Citation2006). Indeed, the correlation between deterioration of the retro-reflectivity of the marking material and safety has been the focus of several research projects such as a) Explanatory analysis on the frequency of traffic crashes and the state of degradation of lane strips (Donnell, Karwa, and Sathyanarayanan Citation2009), b) Serviceability level of markings in terms of age and traffic volume (Benz et al. Citation2009), and c) Emphasize on maintaining the quality level of strips to avoid road incidents (Carlson, Park, and Kang Citation2013). Sitzabee, Hummer, and Rasdorf (Citation2009) concluded that degradation of markings was associated with service age, initial retro-reflectivity, traffic load, and the lateral location of the line. Besides, the factorial analysis did not observe a significant correlation between the durability of markings and factors such as snowplow activities, region, line width, and line thickness. Thus, inspection becomes a feasible measure to control the quality of markings since the complexity of the overarching degradation model. Jiang (Jiang Citation2008) recommends a 20% sampling rate of all existing markings to assure effective management, referring to the work completed by (Weinkein, Branham, and Ginder Citation2002). Sampling is the backbone of an empirical pavement marking management system. Accordingly, Sasidharan, Karwa, and Donnell (Citation2009) proposed a data-driven decision-making platform for reliable maintenance of pavement markings. In practice, a great amount of resources is allocated to the maintenance and replacement of marking segments since their important functions on regulating and navigating the traffic. For example, the Washington State Department of Transportation (WSDOT) re-strips more than 4,500 miles (7242 km) of highways every year. The average cost for pavement marking application is $1,811 per mile (1125 $/km) and $2.6 per unit for marker replacement, calculated by data from (Pike et al. Citation2014). A sizable amount of resources is spent on maintaining roads in acceptable conditions defined by regulations. Manual inspection exhibits great reliabilities in ascertaining the safety of road users. However, traditional manual inspection approaches are costly, time-consuming, subjective, and risk-prone (Gong et al. Citation2022; Liu et al. Citation2021; McGhee Citation2004). New methods with accuracy and automation are urgent in the integrity assessment of pavement marking.
Road quality inspection vehicles emerged in the 1980s to improve the detection of common forms of defects such as cracks and potholes. Kinds of sensors have been integrated into the road inspection and condition assessment systems to collect data on different aspects of road quality. For instance, laser scanning and ultrasonic waves were used to measure rutting, and cameras were deployed to detect cracks (Feng et al. Citation2022; Maser Citation1988). Specifically, road safety audits and safety inspections are two out of four instruments highlighted in the EU’s blueprint for Road Safety Action Program 2010–2020 (Townsend and Avenoso Citation2008). Therefore, endeavors to automate the process of safety inspection have been a focus of research (Qingyang et al. Citation2022; J. Sun et al. Citation2021; Zhao et al. Citation2021). For example, a periodic inspection of road marking or traffic devices is mandatory every 2 years in Germany (Cardoso et al. Citation2007). Data analysis still takes a great amount of labor and time during data collection, while little disturbance is caused by pavement management systems in traffic flow. Thus, many semi-automated or automated assessment systems have been proposed to improve working efficiency and avoid individual judgment. Fukuhara et al. [20] proposed an automated system to detect cracks on concrete structures by integrating image processing methods. In the following years, much work focuses on the investigation of visual data segmentation and classification methods to improve the performance of pavement quality assessment (Koutsopoulos, Sanhouri, and Downey Citation1993; Saar and Talvik Citation2010). Recently, much research is conducted on further improving the automation level and robustness of assessment methods with different types of pavement defect evaluation (Cao, Fan, et al. Citation2021; J. Sun, Huang, et al. Citation2021; Wang et al. Citation2022; W. Zhang et al. Citation2019). 3D sensing technologies for pavement distress detection like stereo imaging, shape (depth) from focus, and laser scanning are investigated (Mathavan, Kamal, and Rahman Citation2015; G. Sun et al. Citation2020). Besides, machine learning and multi-objective optimization have been adopted in the design and prediction for the performance of the pavement (J. Sun, Tang, et al. Citation2022). Great advancement will be achieved with the development of hardware and data processing methods in the detection of pavement defects. However, challenges remain in the high cost of advanced hardware and latency in processing large-volume data (Koch et al. Citation2015). Ground vehicles can collect measurements more effectively than conventional manual inspection, regarding pavement quality. But there are also some disadvantages to the ground-vehicle inspection platform. For instance, the field of view and position of cameras is impacted due to the height limit of a vehicle. Besides, it is difficult for a vehicle to access some areas, including foot walks, bridges, and cycling paths.
Unmanned Aerial Vehicle (UAV) has been widely used for military applications as early as the 1950s (Cambone et al. Citation2005). Over the past decades, UAV has been largely developed in civil and commercial applications. UAV-based remote sensing has been applied in many inspection and assessment tasks, including power line inspection (Deng et al. Citation2014), bridge assessment (Khan et al. Citation2015), industrial facility inspection (Nikolic et al. Citation2013), and building inspection [37]. Zhang [38] developed a UAV-based mapping system to create 3D models and assess defects of unpaved roads. This study shows the great potential of UAV-based remote sensing in road condition assessment. The wide application of UAV is mainly attributed to its agility that UAV is much easier to access complex structures than traditional inspection approaches (Hallermann and Morgenthal Citation2013). UAV can access high or complex areas without the assistance of other equipment such as scaffolding. Particularly, Schnebele et al. (Citation2015) emphasized the capacity of UAV-mounted cameras in capturing high-resolution imagery at a fast speed. Therefore, the UAV platform is promising to replace manual or ground vehicle inspection for detection of road defects including road marking examination.
In this research, a UAV-based platform will be deployed to demonstrate its value in data collection specifically for areas with dense intense marking, such as multi-lane highways and car parks. The full width of each lane needs to be scanned since pavement defect detection is the major objective of road condition surveying systems. Hence, UAV can collect the required data for marking assessment in one passage, while the ground vehicle is just able to survey one lane per passage.
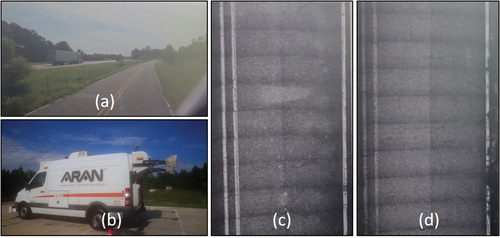
The footage in is captured by the automatic road analyzer (ARAN), which is reported to be deployed by corresponding road agencies in 20 countries (Okine and Adarkwa Citation2013). The analysis exhibits the shortcomings of existing platforms in that several parallel lines are to be surveyed in data collection. The road surface images captured by ARAN of the segment of the road seen in the front view of the vehicle are provided in . This example demonstrates the challenges of deployment of an image-based system for road marking quality assessment. As seen, curbside vegetation blocks the view of the right camera, essentiating the need for reliance on a second camera on the left of the vehicle. Synchronization and adjustment to the captured footages are then required due to different angles of view. The problem exacerbates in scenarios involving sophisticated marking patterns and coloring. Indeed, PASCO, the multinational company that originated in Japan, has developed a wide image capturing in its product “Road Excellent Automatic Logging” (REAL) system. REAL realizes the combination of wide and stereo image capturing by replicating the front view of the driver. Thus, RFAL generates a better understanding of objects in the right of ways such as signage, streetlights, ditches, and curbs. Whereas a UAV-borne camera instead of a ground vehicle is utilized in this paper to capture photos of pavement. Furthermore, an advanced digital image processing method is employed to analyze pavement marking quality and support the selection of cost-effective treatments.
Figure 1. a) Driver’s front view, b) Footage of pavement cameras mounted in the back of the ARAN VAN, c) Left-hand side, and d) Right-hand side (STPGtv ARAN Automatic Road Analyzer Citation2016).
2. UAV platform for pavement-marking evaluation
2.1. A UAV system
A UAV system is mainly composed of four parts: flying platform, navigation, and control system, ground station, and sensors onboard. According to the structure, UAV flying platforms are generally categorized into two classes: fixed-wing or rotary-wing. Fixed-wing UAVs have the advantage of high efficiency and large range, but they also require take-off and landing strips or special launching equipment. On the other side, rotary-wing UAVs, also referred to as model helicopters, have characteristics of vertical takeoff and landing, and hovering, which makes them easy to deploy. According to the definition of the Association for Unmanned Vehicle Systems International (AUVSI), the characteristics of different model helicopters are specified in (Samad et al. Citation2013). Peddinti, Puppala, and Kim (Citation2023) have reported similar classifications that different countries have adopted. Payload is the backbone of all existing classifications. As seen in , there is a positive correlation between payload and flight range and height. UAVs referred to as mini/small are suitable for pavement monitoring purposes. Rotary-wing UAVs can address the access limitations of current inspection platforms due to the advantage of easy deployment, high feasibility, and stability.
Table 1. UAV categories depending on size, payload, endurance, and flying height.
UAV control can be decomposed into two levels: low-level flight control and high-level flight planning. A UAV control unit translates the input commands from the pilot or pre-loaded navigation trajectories into movement. Low-level UAV control includes hovering ability, disturbance rejection, and path following, which are usually accomplished by UAVs. At present, the navigation of UAV platforms relies mainly on Global Navigation Satellite System. Many integrated navigation systems combine vision navigation and radio navigation system to technically improve reliability and security. With a navigation system and autopilot module, UAV flies autonomously above the ground. High-level control is task-related and refers to mission planning including flight path.
Sensors mounted on UAVs are critical parts of the inspection system, which determine the types and quality of raw data regarding pavement conditions. At present, there are various types of sensors including optical, infrared, multi-spectral cameras, ultrasound, and 3D laser scanners. More details on sensors that can be applied to infrastructure inspection are presented by (Máthé and Buşoniu Citation2015). Size and weight are critical factors limiting the choices of sensors as a result of the limited payloads of a small UAV. When performing pavement assessment projects, choices of sensors should also meet task requirements to collect sufficient data. Among them, optical cameras are one of the most prevalent sensors on board because of their low cost and efficient data collection. In this paper, a high-resolution camera is employed by the UAV to collect raw measurements.
2.2. Digital image processing
Digital images are a numeric representation of a photo and are composed of pixels, which are usually organized in a rectangular array. In a computer, an image is often stored as a raster image of two-dimensional arrays. The dimension of an image is the number of rows and columns of pixels. For color images, each pixel has three intensity values of three different channels, e.g. red, green, and blue (RGB). Digital image processing techniques use computer algorithms to identify objects and their relationships in a digital image. The key step in this process is the identification of the edges in the digital image (Donovan Citation2002). The K-mean clustering algorithm divides the whole image into k clusters, in which each pixel belongs to the cluster with the closest mean. Therefore, the K-mean clustering algorithm was adopted to identify objects using the intensity differences between pixels of paintings and asphalt backgrounds (Vora and Oza Citation2013).
2.3. System of UAV-based pavement marking integrity evaluation
In this part, a framework for pavement-marking evaluation using UAV is proposed. As shown in , the framework introduces all aspects of a UAV-based evaluation platform and how it is applied in a pavement-marking management system and is categorized into four groups: pavement marking assessment requirements, data collection, data analysis, and decision-making.
Figure 2. Framework of pavement marking assessment using UAV.
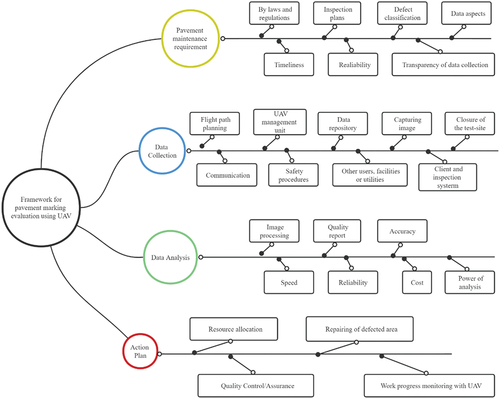
Qualifications of UAV-based assessment are defined by the pavement assessment requirements, which are the foundations for the following procedures. Some of these requirements correspond to certain inspection tasks for different types of defects such as cracking, potholes, and decayed painting retro-reflectivity (J. Sun, Aslani, et al. Citation2021; J. Sun, Wang, et al. Citation2022). Assessment tasks are supposed to define quality problems that should be detected and explain the expected quality indexes. Enforceable standards are listed in related codes and regulations and are usually maintained by the transport department. Other requirements on the data attributes include timeliness, reliability, and transparency of the collection process. Timeliness and reliability describe the efficiency and quality of data collection, while transparency indicates whether the user can fully control and interrupt the data collection process. The data collection performance is useful for managing the schedule and cost of an assessment project.
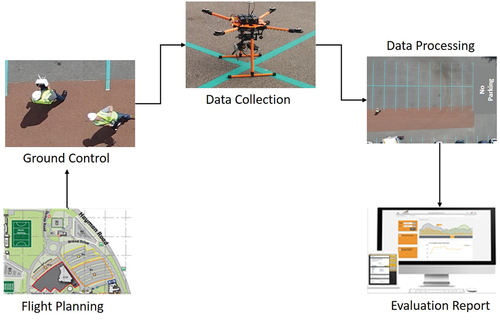
Effective collection of data to reflect pavement conditions is a central component of a pavement management system. The data collection process is the most resource-intensive part of UAV-based quality assessment and mainly comprises the following steps: a) flight planning, b) UAV control, c) onsite collection, d) data repository, and e) communication. The overall process of onsite data collection is described in .
Figure 3. Process of UAV-based data collection.
The flight path for autonomous data capture is a crucial component in the planning phase. Despite the common factors considered in task specification and work permission, other factors such as weather and obstacles should also be paid attention to. Weather condition impacts the image quality and severe weather condition could jeopardize the safety of the UAV. Vegetation and other obstacles may cover some parts of the road surface and adversely impact the flight altitude adjustment. The final flight and work plans are designed according to all these factors. The flight is supposed to cover all inspection assessment areas at a workable resolution and minimize costs including manual effort, battery usage, and flight time. Thus, the flight path designing process is derived by solving the optimization problem. Parallel genetic algorithms and particle swarm optimization have been utilized in the UAV autonomous control module to achieve real-time optimal trajectories (D. Li, Ge, and Lee Citation20210; Roberge, Tarbouchi, and Labonté Citation2013). Furthermore, the design can take advantage of as-built or as-designed models of the infrastructure to be inspected (Lv, Chen, and Lv Citation2022; W. Zhang et al. Citation2021). Sufficient information such as obstacles and constraints regarding the flight mission is contained in GIS (Geographical Information System) or BIM (Building Information Model).
UAV certain management team is urgent for each project to be responsible for the transportation, flight, monitoring, and retrieval of the UAV platform during the whole period of data collection. After taking off, a UAV can fly autonomously according to the planned path with its navigation and control system. This autonomous flight has major benefits including high efficiency, minimized workforce, and low cost, particularly for large-scale projects. Ground control is necessary to set up the initial environment and monitor the UAV operation. As an alternative to autonomous flight, the UAV can be remotely controlled during the entire flight by an operator. The flying height of a UAV varies from a few meters up to 300 m depending on the safety requirements of the relevant civil aviation authorities. A suitable flight altitude is based on terrain conditions and data collection requirements to satisfy both safety and functionality. The management team will then retrieve the UAV platform once all the regions of interest are covered and the flight process is completed.
UAV-borne cameras can capture high-resolution images of pavement surfaces by cooperating with the flight altitude and camera performance. The accurate assessment will then be realized based on the clear record of pavement defects. The raw data can either be stored on a UAV platform or transferred back in real time to a ground station via a wireless communication system. Besides, instant communications support the transfer of inspection data like videos and images between the UAV platform and ground control. Real-time data transmission plays an important role in the real-time inspection of pavement quality (Zhou et al. Citation2022; Zhu et al. Citation2022). However, the bandwidth of data transmission restricts real-time data transmission (Jiang and Li Citation2022; Wu et al. Citation2021). Thus, onboard data processing is preferred and studied to enable autonomous online data processing and reduce the volume of data transmission. The onboard data processing means data compression and redundant data cleaning for the assessment task.
Safety must be secured in the data collection stage when flying an unmanned assessment platform over roads or inhabited areas. Especially, remote control of high flight altitude and assessment systems are exposed to risks that are different from conventional methods. Electromagnetic interference may lead to the failure of navigation and communication of a UAV platform. Besides, the climate of the inspection region has an impact on both data quality and safety. For example, the assessment procedure may impose temporary speed and access limits on the infrastructure or facilities being inspected. Furthermore, the altitude of the UAV should be adjusted to avoid powerlines otherwise serious hazards may occur. Many regulations for UAV flights are released by civil aviation authorities in the past decade. However, there are still many violated rules, which are likely to cause not only crashes of UAVs but also public safety issues. This is especially important for special environments near airports and aerodromes. Therefore, several key points are anticipated to be considered including detailed planning, technical reliability of hardware, and compliance with regulations.
Data processing is the interpretation of images to produce information supporting pavement management and plays a key role in any successful pavement management system (Du et al. Citation2021; Y. Li et al. Citation2021; Zheng, Liu, and Yin Citation2021). It classifies the raw images, detects regions and features related to road quality, and finally recognizes defection and surface anomalies of pavements (Cao, Li, et al. Citation2021). Depending on sensor and data types, many approaches have been investigated and applied for defect detection, including conventional feature detection, machine learning, and the state-of-the-art deep learning approaches (J. Sun, Lin, et al. Citation2021; J. Sun, Wang, et al. Citation2021; Tang et al. Citation2021). A critical review of computer vision-based approaches for defect and condition assessment of infrastructure is presented by (Koch et al. Citation2015). Besides, current image-based reconstruction techniques 2D and 3D models of road surfaces can be built and used to detect geometric defects (Lhuillier Citation2012). The accuracy of surveying with the UAV platform is up to centimeters. The power of the analysis approach can be assessed in the following aspects: speed, reliability, cost, and level of automation. A high automation level can reduce labor costs and time of assessment work. Computation cost and reliability are two main factors influencing the choices of different approaches. The extremely high computation complexity of analysis algorithms leads to the impossibility or high cost of real-time online data analysis. The low altitude of flight and the high-quality camera produces images of high resolution, which contain rich information regarding painting quality and pavement defects. In the following section, a painting quality evaluation method using UAV imagery is proposed. The final evaluation report will describe the results of pavement evaluation with UAV and give quantitative indicators regarding surface conditions. Compared to decision-making based on the knowledge and experience of road supervisors, those high-quality data and quantitative indicators make the assessment system more objective, accurate, and reliable.
The action plan is related to decision-making and means actions required to retrofit pavement markings given the results of the UAV assessment. The extent of deterioration of pavement markings is properly ranked based on quality indicators from UAV-based evaluation on maintenance and rehabilitation. Pavement managers make working plans regarding pavement maintenance. If repairment is required, available resources are distributed based on conditions and the priority of repairing tasks. At present, heuristic methods like genetic algorithm or artificial intelligence techniques are studied to solve the resource allocation task, which is modeled as an optimization problem. More importantly, the UAV platform can also be applied to quality control, progress monitoring, and documentation process of the maintenance project. Through repeated flights over the repaired areas, updated information can be obtained with the same procedure as the initial assessment.
3. Case study and results
3.1. Pavement marking image collection
An experiment was conducted to test the feasibility of the developed method in a parking area of a university. An overview of the experiment site is displayed in . The UAV is a small fixed-wing one and is transported to the site by car. To avoid influencing parking users and ensure safety, the experiment was arranged in the early morning when there were few cars and the inspection area was temporarily closed.
Figure 4. UAV platform adopted in the experiment: (a) Vehicle to transport the UAV, (b) The small four-winged rotary UAV, and (c) The test bed and two pilots controlling the flight.
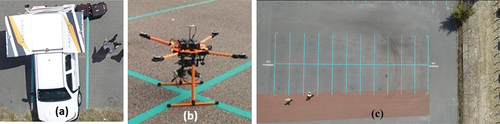
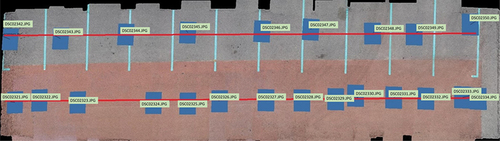
Rather than in an autonomous mode, the UAV is manually controlled by a pilot with a remote controller during the inspection process. The UAV flew along two strips above the car park and the approximate flight path is shown in with red lines. The platform is embedded with a camera of SONY DSC-RX100M3. The resolution of the image is 5472 × 3080 pixels and is captured with a fixed focal length of 8.8 mm. The distribution of captured images is also depicted in , where blue rectangles show where pictures were taken. All the images are stored in the camera’s storage and processed after the UAV is retrieved.
Figure 5. Overview of the car park area in the experiment and positions of cameras when capturing photos.
3.2. Parking marking quality evaluation through digital image processing
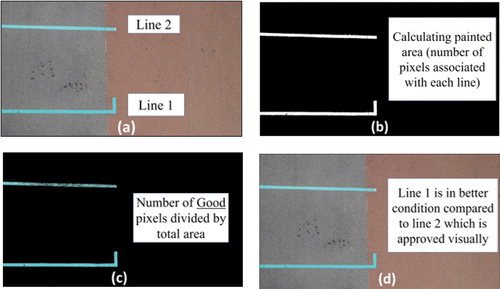
In this study, a marking quality evaluation method based on UAV imagery is developed (). This method first extracts painting areas from images taken by the UAV and then classifies painting areas according to their texture. A quantitative indicator of marking quality is finally proposed based on the classification results.
Figure 6. Process of evaluating painting quality: (a) Original image, (b) Binary image, (c) Pixels of good quality, and (d) Evaluating results.
Given intensity differences between pixels of paintings and asphalt backgrounds, the pixels belonging to painting regions are classified using the K-mean clustering algorithm (Vora and Oza Citation2013). The K-mean clustering algorithm divides the whole image into k clusters, in which each pixel belongs to the cluster with the closest mean. The color differences between painting areas of parking lines and backgrounds are obvious. Based on this, a color-based K-mean clustering algorithm is used to cluster the whole painting area into two groups. One of the groups contains pixels that are of parking bay lines and the other contains pixels of backgrounds. During clustering, the distance between two pixels is measured by the Euclidean distance between their color vectors. Instead of the original RGB color space, the clustering process is performed in the LAB color space, as it can avoid the influence of illumination and objectively distinguish different colors. To avoid local minima, the clustering process is repeated several times until a stable clustering is achieved. After clustering, the painting area is filtered with morphological operations, which reduce the impacts of painting abrasion and random noise. With the above-described method, we tried to detect all parking lines in the experiment area and detection results are shown in , where parking lines are isolated as blue lines on dark background. The experiment illustrates that the approach succeeds in detecting all parking lines from images.
Figure 7. Results of parking lines detection (paintings are represented as blue areas).

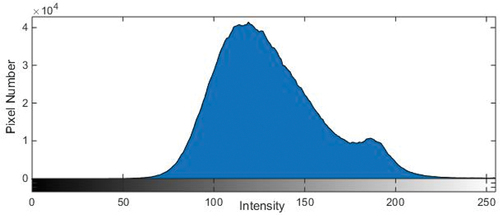
Due to the intensity differences between pixels of different qualities, they belong to two different clusters in the histogram of the image. displays the histogram of a UAV image including the painting area. In the histogram, there are two peaks corresponding to two clusters. To extract painting regions of high quality from the whole painting area, the original photo is converted to a binary one with the grayscale thresholding method. Thresholding changes pixels below a certain threshold into zero (poor) and pixels above the threshold into one (high quality). A key part of this method is to determine thresholds that divide pixels of images into background and foreground. This paper applies the Otsu method to find the threshold that minimizes the overlap between the background and foreground (Otsu Citation1979). After thresholding, the painting area of high quality will be segmented into the foreground of a binary image, while the remaining areas are backgrounds.
Figure 8. Histogram of a UAV image.
Then, the number of high-quality pixels in a painting area is counted, and its ratio to the whole number of pixels in this area is chosen as a quantitative indicator of painting quality. If the ratio value is above a predefined threshold, a painting area will be considered as of good condition. Otherwise, it will be marked as poor condition. The threshold is determined according to the inspection criterion.
The following procedure was adopted to set the threshold of 0.90. Two of the researchers visually inspected the 12 surveyed lines before the experiments separately. They then agreed on a ranking of the lines in terms of their deterioration status. The outcome of the manual onsite examination was that the four lines shown at the far-right side of needed repainting. Those lines had suffered from degeneration as a result of heavy abrasion of vehicle tires. The ranking was then mapped against the calculated indices to inform the threshold that should be used as an indicator of poor line quality in the current and future applications. It must be noted that the threshold can be set at the discretion of each user based on their own tolerance of the degree of deterioration.
Figure 9. Quality evaluation results of parking lines where lines of poor quality are marked as red.

3.3. Decision making
The UAV-based evaluation system produces the ratio of complying pixels overall painted area as a quantitative index of painting integrity, enabling a pavement marking manager to make proper decisions on maintenance. The results of the parking-line quality evaluation are shown in and , where lines of different qualities are displayed and their corresponding quality indexes are presented. In the test area, there are 12 parking lines in total. Four of them have an index of lower than 0.90 and are of poor quality and required to be repainted or fixed. The four lines are highlighted in .
Table 2. Quality index of parking lines.
4. Discussion and limitation
Given the result of the case study, the assessment conducted by UAV could match human judgment greatly. UAV can complete the task of automated pavement marking assessment and exhibits the potential for large-scale application. However, the UAV is controlled manually but not automatically since the small size of the parking lot and the evenly distributed road marking lines. The conditions of the above practice are not complex enough, despite the dense road markings. First, no obstacle interfered with the flight and the inspection area was temporarily closed to avoid influencing parking users and ensure safety. The parking was kept vacant for the purpose of this study, but it is anticipated that the shadow of the cars, fully or partially, cover pavement marking in real-life applications. This is not going to be an issue in practical scenarios because the K-mean clustering algorithm that is used for extracting painted regions works on the basis of color difference of the marking and the pavement. Only two clusters, namely the painted lines and the background pavement, are required to be produced in our image processing. Hence, the overshadowed lines are still expected to be clustered as painting. Note that the use of LAB color space instead of RGB also reduces the impact of varying illumination.
Second, the K-means algorithm should also be expanded to process non-vertical angle photos to improve the efficiency of data collection and flexibility of flight routes.
Third, the endurance of the UAV limits the large-scale application of the UAV in the inspection of the road marker line. The flight time of a UAV in this experience is about 22 min, which is enough to deal with a small task like a parking lot but not affordable for city-scale tasks. Thus, higher-performance batteries and optimized flight routes have been the key content in the design and deployment of UAV.
Fourth is policy and safety restrictions on UAV flights. Space monitoring agencies like the European Aviation Safety Agency (EASA from the EU) and the Federal Aviation Authority (FAA, US), allow the use of drones with some restrictions. The restrictions include weight, sensors and equipment (such as a camera), day-only operations, altitude, professional training and certification, registration of drones and prior permissions for using the air space, especially in controlled flying space. Especially, the most critical restriction that blocks wide-scale use is that the operation of drones should remain below the visual line of sight (VLOS) of the operator (Davies et al. Citation2018). Extended Visual Line of Sight (EVLOS) operations need submissions from the Civil Aviation Authority (CAA) which include an acceptable safety case and the use of deployed observers. Furthermore, the Beyond Visual Line of Sight (BVLOS) poses the highest risk. Permission for the BVLOS must consider aerial separation and collision avoidance, or even within segregated airspace [68].
Fifth, the ability of UAVs to respond to emergencies, such as bad weather, collisions, line failures, etc., is necessary to configure parachutes and other equipment to protect equipment and data security. It is possible that drones can be equipped with a system that can recognize any failure or unpredicted change in weather conditions and the system automatically aborts the operation using some mechanisms such as deploying UAV parachutes or navigating back to the base.
The framework presented in this paper is suitable for autonomous assessment of all scenarios involving pavement marking. An on-campus parking was selected as a test case primarily due to the ease of its closure for the experimentation. The study was the first of its kind, and hence the research team was cautious of safety. Therefore, the parking was kept vacant as a safety measure.
5. Conclusion
In this work, a UAV platform for pavement marking evaluation is developed to increase the efficiency and access ability of conventional assessment approaches. The framework of UAV-based evaluation is discussed in detail, describing the whole process of pavement marking management. An experiment is conducted to validate the developed platform. The results demonstrate that UAV-based assessment approach can evaluate the quality of paintings in a car park and support pavement marking management decisions. The cost of the deployed UAV system is very low and can be extended to inspect other road elements including cracks, markers, and signs. Future work will be conducted on the integration of multiple sensors on UAVs to capture more data regarding road quality. UAV-based evaluation will be extended into a comprehensive inspection tool for both road surface and pavement marking.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Payam Rahnamayiezekavat
Payam Rahnamayiezekavat is Associate Dean (International) at the School of Engineering, Design and Built Environment. Dr Zekavat is recognised for his research-based solutions to address the issue of poor performance in the construction industry. His work concentrates on the prevalent issue of non-compliant design and construction. Accordingly, he participates to national and international committees and working groups that are established to facilitate performance-based design and certification. His research activities include more than $2.4 million worth of funded projects. Payam is currently supervising eight PhD students. Dr Zekavat’s Field-Weighted Citation Impact is 2.33 meaning his research publications are cited 133% more than the global average in his field of research. In line with his interest in building compliance, Associate Professor Zekavat is actively engaged in delivery of Building Surveying Programs.
Di Wang
Di Wang is affiliated with Institute for Smart City of Chongqing University in Liyang. His previous scholarly works involve implementation of virtual reality, use of BIM for major infrastructure projects, and integration of sensing technologies with construction processes. Jian Chai offers intensive industrial experience in drone-based photogrammetry and Lidar for 3D modelling, inspection and mapping. He is an experienced researcher with a demonstrated history of working in academia. He possesses skills in Python, computer vision, Lidar data processing and machine learning/deep learning. Dr Chia has a strong research background with a Doctor of Philosophy (Ph.D.) focused on Construction Management from Curtin University.
Sungkon Moon
Dr Sungkon Moon is currently working as an Associate Professor at Ajou University, Suwon, Republic of Korea, since 2022. Prior to joining Ajou, he served as a Senior Lecturer/Lecturer at Aston University, Birmingham, UK (2021-2022), and Swinburne University of Technology, Melbourne, Australia (2015-2021). His research focuses on construction engineering and project management, encompassing innovative construction technologies, supply chain management, computer-aided construction, and construction AI (artificial intelligence). He obtained his PhD from UNSW Sydney and completed his Bachelor’s and Master’s degrees in Engineering at Hanyang University, Seoul. His research efforts were recently recognised with the Excellent Research Award by the College of Engineering at Ajou in 2023.
Maria Rashidi
Dr Maria Rashidi is an experienced engineer and researcher with a notable background in design, construction, and asset management projects spanning over 15 years. Her specialised field is Civil Engineering, with a focus on Structural Health Monitoring (SHM) and Decision Support Systems (DSS). Dr Rashidi possesses extensive research capabilities in the area of health monitoring of bridges and other civil infrastructure assets, utilising advanced technologies such as drones, sensor networking, laser scanning, artificial intelligence, and digital twinning. Additionally, she holds a keen interest in infrastructure sustainability, energy harvesting and the development of energy-efficient housing solutions. She is the author and co-author of over 100 scholarly publications, on a wide range of topics in the areas of civil and infrastructure engineering and asset management.
Xiangyu Wang
Xiangyu Wang is world reknown leader in BIM and digital construction. HIs areas of interest entail Building Information Modeling, Information Technology in Construction, Virtual, Augmented and Mixed Reality, Computer-Supported Cooperative Design/Work, Mobile, Pervasive, and Ubiquitous Computing in Design and Construction, Computer-aided Design, E-learning. Professor Wang has published over 200 technical journal and conference papers, books and book chapters.
References
- Bahar, G., M. Masliah, T. Erwin, E.Tan, and E. Hauer. 2006. “Pavement Marking Materials and Markers: Real-World Relationship Between Retroreflectivity and Safety Over Time.”
- Benz, R. J., A. Pike, S. P. Kuchangi, Q. Brackett. 2009. “Serviceable Pavement Marking Retroreflectivity Levels: Technical Report.” Research Reports 0-5656-1. http://tti.tamu.edu/documents/0-5656-1.pdf
- Cambone, S. A.,K. J.Krieg,P.Pace,and L. Wells. 2005. Unmanned Aircraft Systems Roadmap, 2005-2030 0704-0188. https://apps.dtic.mil/sti/citations/tr/ADA445081
- Cao, B., S. Fan, J. Zhao, S. Tian, Z. Zheng, Y. Yan, P. Yang, et al. 2021. “Large-Scale Many-Objective Deployment Optimization of Edge Servers.” IEEE Transactions on Intelligent Transportation Systems 22 (6): 3841–3849. https://doi.org/10.1109/TITS.2021.3059455.
- Cao, B., M. Li, X. Liu, J. Zhao, W. Cao, and Z. Lv. 2021. “Many-Objective Deployment Optimization for a Drone-Assisted Camera Network.” IEEE Transactions on Network Science and Engineering 8 (4): 2756–2764. https://doi.org/10.1109/TNSE.2021.3057915.
- Cardoso J. L.,C. Stefan, R. Elvik, M.Srensen. 2007. Road safety inspection-best practice guidelines and implementation steps. Technical Report.
- Carlson, P. J., E. S. Park, and D. H. Kang. 2013. “Investigation of Longitudinal Pavement Marking Retroreflectivity and Safety.” Transportation Research Record 2337 (1): 59–66. https://doi.org/10.3141/2337-08.
- Davies, L. 2018. “Review of Unmanned Aircraft System Technologies to Enable Beyond Visual Line of Sight (BVLOS) Operations.” In 2018 X International conference on electrical power drive systems (ICEPDS), Novocherkassk, Russia. IEEE.
- Deng, C., S. Wang, Z. Huang, Z. Tan, and J. Liu. 2014. “Unmanned Aerial Vehicles for Power Line Inspection: A Cooperative Way in Platforms and Communications.” Journal of Communications 9 (9): 687–692. https://doi.org/10.12720/jcm.9.9.687-692.
- Donnell, E. T., V. Karwa, and S. Sathyanarayanan. 2009. “Analysis of Effects of Pavement Marking Retroreflectivity on Traffic Crash Frequency on Highways in North Carolina: Application of Artificial Neural Networks and Generalized Estimating Equations.” Transportation Research Record 2103 (1): 50–60. https://doi.org/10.3141/2103-07.
- Donovan, T. 2002. Visual Information Processing XI 4736:1–8.
- Du, Y., B. Qin, C. Zhao, Y. Zhu, J. Cao, and Y. Ji. 2021. ”A Novel Spatio-Temporal Synchronization Method of Roadside Asynchronous MMW Radar-Camera for Sensor Fusion.“ IEEE transactions on intelligent transportation systems 23(11): 22278–22289.
- Feng, W., Y. Wang, J. Sun, Y. Tang, D. Wu, Z. Jiang, J. Wang, et al. 2022. “Prediction of Thermo-Mechanical Properties of Rubber-Modified Recycled Aggregate Concrete.” Construction and Building Materials 318:125970. https://doi.org/10.1016/j.conbuildmat.2021.125970.
- Gong, X., L. Wang, Y. Mou, H. Wang, X. Wei, W. Zheng, L. Yin, et al. 2022. “Improved Four-Channel PBTDPA Control Strategy Using Force Feedback Bilateral Teleoperation System.” International Journal of Control, Automation and Systems 20 (3): 1002–1017. https://doi.org/10.1007/s12555-021-0096-y.
- Hallermann, N., and G. Morgenthal. 2013. “Unmanned aerial vehicles (UAV) for the assessment of existing structures.” IABSE Symposium Report 101(14):1–8.
- Jiang, Y. 2008. Durability and Retro-Reflectivity of Pavement Markings (Synthesis Study).
- Jiang, Y., and X. Li. 2022. “Broad band Cancellation Method in an Adaptive Co-Site Interference Cancellation System.” International Journal of Electronics 109 (5): 854–874. https://doi.org/10.1080/00207217.2021.1941295.
- Khan, F., A. M. F. A. Ellenberg, M. Mazzotti, A. Kontsos, F. Moon, A. Pradhan, and I. Bartoli. 2015. “Investigation on Bridge Assessment Using Unmanned Aerial Systems.” In Structures Congress 2015, Portland, USA. https://doi.org/10.1061/9780784479117.035.
- Koch, C., K. Georgieva, V. Kasireddy, B. Akinci, and P. Fieguth. 2015. “A Review on Computer Vision Based Defect Detection and Condition Assessment of Concrete and Asphalt Civil Infrastructure.” Advanced Engineering Informatics 29 (2): 196–210. https://doi.org/10.1016/j.aei.2015.01.008.
- Koutsopoulos, H. N., I. E. Sanhouri, and A. B. Downey. 1993. “Analysis of Segmentation Algorithms for Pavement Distress Images.” Journal of Transportation Engineering 119 (6): 868–888. https://doi.org/10.1061/(ASCE)0733-947X(1993)119:6(868).
- Lhuillier, M. 2012. “Incremental Fusion of Structure-From-Motion and GPS Using Constrained Bundle Adjustments. IEEE Transactions on Pattern Analysis and Machine Intelligence.” IEEE Transactions on Pattern Analysis and Machine Intelligence 34 (12): 2489–2495. https://doi.org/10.1109/TPAMI.2012.157.
- Li, Y., P. Che, C. Liu, D. Wu, and Y. Du. 2021. “Cross‐Scene Pavement Distress Detection by a Novel Transfer Learning Framework.” Computer‐Aided Civil and Infrastructure Engineering 36 (11): 1398–1415. https://doi.org/10.1111/mice.12674.
- Li, D., S. S. Ge, and T. H. Lee. 2021. “Simultaneous-Arrival-To-Origin Convergence: Sliding-Mode Control Through the Norm-Normalized Sign Function.” IEEE Transactions on Automatic Control 67 (4): 1966–1972.
- Liu, C., D. Wu, Y. Li, and Y. Du. 2021. “Large-Scale Pavement Roughness Measurements with Vehicle Crowdsourced Data Using Semi-Supervised Learning.” Transportation Research Part C: Emerging Technologies 125:103048. https://doi.org/10.1016/j.trc.2021.103048.
- Lv, Z., D. Chen, and H. Lv. 2022. “Smart City Construction and Management by Digital Twins and BIM Big Data in COVID-19 Scenario.” ACM Transactions on Multimedia Computing Communications and Applications 18 (2s): 1–21. https://doi.org/10.1145/3529395.
- Maser, K. R. 1988. “Sensors for Infrastructure Assessment.” Journal of Performance of Constructed Facilities 2 (4): 226–241. https://doi.org/10.1061/(ASCE)0887-3828(1988)2:4(226).
- Mathavan, S., K. Kamal, and M. Rahman. 2015. “A Review of Three-Dimensional Imaging Technologies for Pavement Distress Detection and Measurements.” IEEE Transactions on Intelligent Transportation Systems 16 (5): 2353–2362. https://doi.org/10.1109/TITS.2015.2428655.
- Máthé, K., and L. Buşoniu. 2015. “Vision and Control for UAVs: A Survey of General Methods and of Inexpensive Platforms for Infrastructure Inspection.” Sensors 15 (7): 14887–14916. https://doi.org/10.3390/s150714887.
- McGhee, K. H. 2004. Automated Pavement Distress Collection Techniques. Vol. 334. Washington: Transportation Research Board.
- Nikolic, J., M. Burr, J. Redher, S. Leutenegger, C. Huerzeler, and R. Siegwart. 2013. “A UAV System for Inspection of Industrial Facilities.” In 2013 IEEE Aerospace Conference, Manhattan Beach. IEEE.
- Okine, A., and O. Adarkwa. 2013. Pavement Condition Surveys–Overview of Current Practices. Newark, DE, USA: University of Delaware.
- Otsu, N. 1979. “A Threshold Selection Method from Gray Level Histograms.” IEEE Trans SMC 9:62–66.
- Peddinti, P. R. T., H. Puppala, and B. Kim. 2023. “Pavement Monitoring Using Unmanned Aerial Vehicles: An Overview.” Journal of Transportation Engineering, Part B: Pavements 149 (3): 03123002. https://doi.org/10.1061/JPEODX.PVENG-1291.
- Pike A., P. Songchitruksa, S. Geedipally,D. Kang, and I. Damnjanovic. 2014. Evaluating the Effectiveness of Performance Based Pavement Marking Maintenance Contracts in Texas. Texas: Dept. of Transportation. Research and Technology Implementation Office.
- Qingyang, W., G. Zhou, R. Song, Y. Xie, M. Luo, and T. Yue. 2022. “Continuous Space Ant Colony Algorithm for Automatic Selection of Orthophoto Mosaic Seamline Network.” ISPRS Journal of Photogrammetry and Remote Sensing 186:201–217. https://doi.org/10.1016/j.isprsjprs.2022.02.011.
- Roberge, V., M. Tarbouchi, and G. Labonté. 2013. “Comparison of Parallel Genetic Algorithm and Particle Swarm Optimization for Real-Time UAV Path Planning.” IEEE Transactions on Industrial Informatics 9 (1): 132–141. https://doi.org/10.1109/TII.2012.2198665.
- Saar, T. and O. Talvik. 2010. “Automatic Asphalt Pavement Crack Detection and Classification Using Neural Networks.” In 2010 12th Biennial Baltic Electronics Conference, IEEE.
- Samad, A. M., N. Kamarulzaman, M. A. Hamadani, T. Mastor, and K. A.Hashim. 2013. ”The Potential of Unmanned Aerial Vehicle (UAV) for Civilian and Mapping Application.” In 2013 IEEE 3rd International Conference on System Engineering and Technology, Sha Alam, Malaysia. IEEE.
- Sasidharan, L., V. Karwa, and E. T. Donnell. 2009. “Use of Pavement Marking Degradation Models to Develop a Pavement Marking Management System.” Public Works Management & Policy 14 (2): 148–173. https://doi.org/10.1177/1087724X09349513.
- Schnebele, E., B. F. Tanyu, G. Cervone, and N. Waters. 2015. “Review of Remote Sensing Methodologies for Pavement Management and Assessment.” European Transport Research Review 7 (2): 1–19. https://doi.org/10.1007/s12544-015-0156-6.
- Sitzabee, W. E., J. E. Hummer, and W. Rasdorf. 2009. “Pavement Marking Degradation Modeling and Analysis.” Journal of Infrastructure Systems 15 (3): 190–199. https://doi.org/10.1061/(ASCE)1076-0342(2009)15:3(190).
- STPGtv. ARAN Automatic Road Analyzer. 2016. “A Look Inside What ARAN Does and How it Could Benefit St. Tammany Parish.” [Accessed August 11th, 2016]. Available from: https://youtu.be/rtP9EOf-Cdo.
- Sun, J., F. Aslani, J. Lu, L. Wang, Y. Huang, and J. Ma. 2021. “Fibre-reinforced lightweight engineered cementitious composites for 3D concrete printing.” Ceramics International 47 (19): 27107–27121.
- Sun, J., F. Aslani, J. Wei, and X. Wang. 2021. “Electromagnetic Absorption of Copper Fiber Oriented Composite Using 3D Printing.” Construction and Building Materials 300:124026. https://doi.org/10.1016/j.conbuildmat.2021.124026.
- Sun, G., Y. Cong, Q. Wang, B. Zhong, and F.Yun. 2020. “Representative Task Self-Selection for Flexible Clustered Lifelong Learning.” IEEE Transactions on Neural Networks and Learning Systems 33 (4): 1467–1481.
- Sun, J., Y. Huang, F. Aslani, X. Wang, and G. Ma. 2021. “Mechanical Enhancement for EMW-Absorbing Cementitious Material Using 3D Concrete Printing.” Journal of Building Engineering 41:102763. https://doi.org/10.1016/j.jobe.2021.102763.
- Sun, J., S. Lin, G. Zhang, Y. Sun, J. Zhang, C. Chen, A. M. Morsy, et al. 2021. “The Effect of Graphite and Slag on Electrical and Mechanical Properties of Electrically Conductive Cementitious Composites.” Construction and Building Materials 281:122606. https://doi.org/10.1016/j.conbuildmat.2021.122606.
- Sun, J., Y. Tang, J. Wang, X. Wang, J. Wang, Z. Yu, Q. Cheng, and Y. Wang. 2022. “A Multi-Objective Optimisation Approach for Activity Excitation of Waste Glass Mortar.” Journal of Materials Research and Technology 17:2280–2304. https://doi.org/10.1016/j.jmrt.2022.01.066.
- Sun, J., Y. Wang, X. Yao, Z. Ren, G. Zhang, C. Zhang, X. Chen, et al. 2021. “Machine-Learning-Aided Prediction of Flexural Strength and ASR Expansion for Waste Glass Cementitious Composite.” Applied Sciences 11 (15): 6686. https://doi.org/10.3390/app11156686.
- Sun, J., J. Wang, Z. Zhu, R. He, C. Peng, C. Zhang, J. Huang, et al. 2022. “Mechanical Performance Prediction for Sustainable High-Strength Concrete Using Bio-Inspired Neural Network.” Buildings 12 (1): 65. https://doi.org/10.3390/buildings12010065.
- Tang, Y., W. Feng, Z. Chen, Y. Nong, S. Guan, and J. Sun. 2021. “Fracture Behavior of a Sustainable Material: Recycled Concrete with Waste Crumb Rubber Subjected to Elevated Temperatures.” Journal of Cleaner Production 318:128553. https://doi.org/10.1016/j.jclepro.2021.128553.
- Townsend, E. and A. Avenoso. 2008. “A Blueprint for 4th Road Safety Action Programme for the EU 2010-2020.” [Accessed September 24, 2008. http://etsc.eu/a-blueprint-for-4th-road-safety-action-programme-for-the-eu-2010-2020/.
- Vora, P., and B. Oza. 2013. “A Survey on K-Mean Clustering and Particle Swarm Optimization.” International Journal of Science and Modern Engineering 1 (3): 24–26.
- Wang, J., J. Tian, X. Zhang, B. Yang, S. Liu, L. Yin, W. Zheng, et al. 2022. “Control of Time Delay Force Feedback Teleoperation System with Finite Time Convergence.” Frontiers in Neurorobotics 16:16. https://doi.org/10.3389/fnbot.2022.877069.
- Weinkein, D., R. Branham, and V. Ginder. 2002. District 7 Report on Phase 1 and 2 on the Pavement Marking Management System Research Projects.
- Wu, M., B. Zhang, Y. Zhou, and K. Huang. 2021. “A Double Fold 7x8 Butler Matrix Fed Multibeam Antenna with a Boresight Beam for 5G Applications.” IEEE Antennas and Wireless Propagation Letters 21 (3): 516–520.
- Zhang, W., H. Li, Y. Li, H. Liu, Y. Chen, and X. Ding. 2021. ”Application of Deep Learning Algorithms in Geotechnical Engineering: A Short Critical Review.” Artificial Intelligence Review 2021 (9):1–41. https://doi.org/10.1007/s10462-021-09967-1.
- Zhang, W., R. Zhang, W. Wang, F. Zhang, and A. T. C. Goh. 2019. “A Multivariate Adaptive Regression Splines Model for Determining Horizontal Wall Deflection Envelope for Braced Excavations in Clays.” Tunnelling and Underground Space Technology 84:461–471. https://doi.org/10.1016/j.tust.2018.11.046.
- Zhao, C., F. Liao, X. Li, and Y. Du. 2021. “Macroscopic Modeling and Dynamic Control of On-Street Cruising-For-Parking of Autonomous Vehicles in a Multi-Region Urban Road Network.” Transportation Research Part C: Emerging Technologies 128:103176. https://doi.org/10.1016/j.trc.2021.103176.
- Zheng, W., X. Liu, and L. Yin. 2021. “Research on Image Classification Method Based on Improved Multi-Scale Relational Network.” PeerJ Computer Science 7:e613. https://doi.org/10.7717/peerj-cs.613.
- Zhou, G., B. Song, P. Liang, J. Xu, and T. Yue. 2022. “Voids Filling of DEM with Multiattention Generative Adversarial Network Model.” Remote Sensing 14 (5): 1206. https://doi.org/10.3390/rs14051206.
- Zhu, B., Q. Zhong, Y. Chen, S.Liao, Z.Li, K.Shi, M. A. Sotelo.2022A Novel Reconstruction Method for Temperature Distribution Measurement Based on Ultrasonic Tomography. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control 69 (7): 2352–2370.