
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Active control in adaptive structures allows for reducing the structural weight of a building and thus to drastically decrease the construction sector’s global impact. For an active control, it is necessary to estimate the state. Especially for large structures, decentralized approaches are particularly advantageous. However, the choice of the individual decentralized models, the substructuring, is important. This work considers decentralized state estimation for different substructure layouts obtained by the Relative Gain Array (RGA) for an adaptive high-rise structure. The estimators are realized using Information Filters (IF) based on reduced models derived from the full model via SEREP-Guyan and modal reduction. Different degrees of interconnection (none, sparse, full) are investigated w. r. t. estimation accuracy and robustness towards communication failure. For more substructures the estimation error increases. Depending on the layout, communicating is beneficial, but a full interconnection is not necessary for a sufficient estimation. In case of a failed information exchange, communicating estimators should adapt to the fault.
I. Introduction
More than half the world’s population lives in cities. As the population grows, urbanization will continue to increase (Department of Economic United Nations and Population Division Social Affairs Citation2019). However, housing space is already scarce, so new constructions are needed. Particularly in cities, the lack of space makes high-rise buildings a good solution (Weidner Citation2020). This yields multiple challenges. Necessary resources such as sand for the production of concrete are in increasingly short supply. Given that the construction sector is responsible for more than of global resource consumption (OECD Citation2019) and approximately
of greenhouse gas emissions (United Nations Environment Programme Citation2022), innovative solutions in this area are needed. For this reason, the Collaborative Research Centre 1244 Adaptive Skins and Structures for the Built Environment of Tomorrow has been established. As part of the program, an experimental adaptive high-rise structure has been built on the campus of the University of Stuttgart (see ). Adaptive structures are structures that can adapt independently to changing environmental conditions by means of integrated actuators. Ostertag showed that adaptive structures have the potential to save about
of material and achieve more than twice the lifespan compared to a regular building (Ostertag et al. Citation2020). Due to its low structural weight, the building is more susceptible to dynamic disturbances such as wind or earthquakes. To counteract the resulting structural vibrations, the building is equipped with hydraulic actuators. Active control requires knowledge of the state which contains e. g., the displacement and velocity. Various sensors are available for this purpose. However, not all states can be measured, such that state estimation is required.
Figure 1. High-rise adaptive demonstrator building with sensors and actuators in Stuttgart, Germany (ISYS, ITO).

For a large-scale system such as a high-rise, decentralized approaches offer significant advantages over a centralized approach. A centralized filter estimates the global state based on the overall model. In contrast, decentralized filters estimate the respective local state based on smaller models describing a subsystem of the overall system. The computational effort of the decentralized control units, compared to the centralized, is reduced, which has a beneficial effect on real-time capability. Moreover, the robustness of the state estimation is increased by increasing the redundancy by overlapping states. Decentralized estimators can be implemented as distributed estimators, meaning that they do not fully communicate with each other. Decomposing large structures into substructures for state estimation has proven effective in many applications. An overview of methods for decentralized control and estimation of general complex systems is given in (Siljak Citation2011). For example in (Tatsis et al. Citation2017, Citation2021), wind turbines are divided into substructures for efficient input and state estimation. Another example where substructuring is advantageous are roller coasters, as shown in (Puerto Tchemodanova et al. Citation2021). Here, substructures are selected based on the given geometry and an augmented Kalman filter is used to estimate strains. Decentralized approaches in the field of large-scale buildings are investigated e. g., in (Ying Lei et al. Citation2012). A 20-storey building is divided into two subsystems, with the interconnections modeled as disturbances and determined using recursive estimation. The results of the control based on a linear quadratic Gaussian (LQG) scheme are comparable to a centralized approach. The decentralized LQG control for a large steel structure leads to similar results in (Bakule et al. Citation2014). However, both studies only examine a single setup with two substructures chosen on the basis of geometrical relations is examined.
Substructuring of large-scale buildings and their effect on decentralized control is described in (Xu et al. Citation2022). The authors conclude that the position and degree of overlapping and the number of subsystems have an impact on the controller performance. These properties are optimized by a simulation study of a 5-storey building. However, subsystems are chosen by adding or removing entire storeys, which is not intuitively done for abstract structures. In (Lenis et al. Citation2015) the optimal substructuring of a heat plate using different interaction analysis methods is examined. The commonly used Relative Gain Array (RGA) is compared to the Niederlinski Index and the Partial Relative Gain (PRG). For this large-scale structure, the PRG leads to better results due to compromising better between number of overlapping states and estimation performance, but only two substructures are targeted.
According to (Warsewa et al. Citation2020b), for most applications local models are obtained by partitioning directly into substructures, whereas coupling effects are either neglected, leading to an information loss and thus to a decreased control performance, or modeled as interconnection effects, increasing the sensitivity to disturbances. In contrast to this, model order reduction techniques are advantageous. They are already applied in (Mallory and Miller Citation2000) for decentralized control of strongly coupled large scale space structures. In (Sun et al. Citation2023) an overview about the theory and recent applications of dynamic condensation for substructuring is given. In previous work (Warsewa et al. Citation2019, Citation2020a, Citation2020b), the SEREP-Guyan transformation provides good estimation results. The Serep-Guyan transformation is a hybrid technique from dynamic condensation methods. It reduces the number of degrees of freedom (DOFs) of a system in order to reduce the complexity of the model for analysis without losing the essential dynamic properties. A distinction is made between active and inactive DOFs, with active DOFs contributing significantly to the structural dynamics while others may be inactive or less significant. Based on this transformation, decentralized estimation and LQG control is studied in (Warsewa et al. Citation2020a) and a robustness analysis against parameter uncertainties, as e. g., the damping coefficient or the system’s eigenvalues, is carried out. Warsewa proposed a decentralized Information Filter (IF) for the adaptive structure in and different communication network topologies were investigated in (Warsewa et al. Citation2020b). Depending on the energy consumption and damping requirements, equal or better performance can be achieved compared to a centralized LQG scheme, although the centralized estimation performs better than the decentralized one. The centralized approach has the highest initial error, but the shortest convergence time. However, only one single setup of substructures is investigated, which was chosen according to an intuitive division of the building into four substructures of equal size. In general, this is not always possible, e. g., for non-symmetric buildings or bridges. Moreover, failure in the communication between the decentralized estimators is disregarded in (Warsewa et al. Citation2019, Citation2020a, Citation2020b).
The main contribution of this paper is the comparison of the state estimation performance by IFs for different subsystem layouts and communication network topologies of an adaptive structure. The substructure layouts are predefined. The state estimation is evaluated in terms of accuracy and robustness to communication failures in a simulation study. For this, the adaptive structure is excited by wind unknown to the estimation algorithm. The methods presented can be extended to less lightweight structures, such as concrete, provided the material is homogeneous and the model can be derived using the finite element method.
The remainder starts with linear modeling of an adaptive high-rise structure in Sec. II. In Sec. III a SEREP-Guyan and modal transformation is utilized to obtain the decentralized models and reduce their order. The substructuring is done on the basis of the RGA and briefly introduced. The state estimation is realized in Sec. IV by IFs along with different communication network topologies. Finally, the simulation study and its results are described in Sec. V.
II. System modeling
The adaptive building in is composed of several floors with vertical supports and diagonal bracings. The latter are mainly used to increase the stiffness of the overall building. All supports and bracings are modeled as truss elements. In addition, elements that approximate the floor of each storey are added to the model. Points where elements are connected are denoted as nodes. The linear equations of motion
are derived by means of the finite element method. The vector describes the translational and rotational DOFs of the structure’s nodes. The matrix
represents the mass matrix and
the stiffness matrix. The damping matrix
is modeled as Rayleigh damping, which is introduced in (Strutt Baron Rayleigh Citation1896). The linear combination of the mass and stiffness matrix is numerical advantageous and ensures that the undamped and damped system have the same eigenmodes. As coefficients, and
are chosen. For the resulting damping, the equation
holds. With an eigenfrequency
for the first two eigenmodes and
for the third eigenmode, the damping is about
and
respectively, which is in line with measurements of the demonstrator building. The external control input
and the disturbances
, e. g., static or dynamic wind loads, are attributed to the respective DOFs by the matrices
and
. For simulation purposes, a static vertical load on each level is considered to approximate the structural weight of each floor. In addition, a wind model as described in (Gienger et al. Citation2021) with varying wind direction serves as a dynamic disturbance. Thus, the disturbance
is composed of a wind disturbance and a static vertical load. The wind speed and direction for the simulation study is given in . The positive
-direction is defined as
and the positive
-direction as
(compare with the coordinate system in ).
Figure 2. Wind speed and direction time series used in the simulation study.
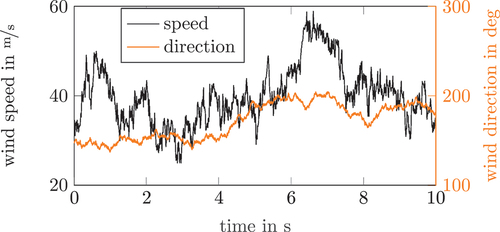
Figure 3. High-rise adaptive structure with original sensor system (a) and the sensor setup resulting from the sensor placement algorithm used in the simulation study (b). The LED-markers are tracked by two cameras, oriented in - and
-direction. The
node serves as sample node for evaluation and is marked in red. (c) Substructures based on RGA for
.
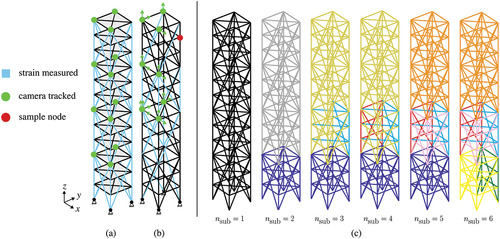
Various sensor systems are installed on the high-rise building (see ). Strain gauges are attached to all supports and bracings. In addition, an optical measurement system tracks LED-marker at various positions using cameras, yielding displacement measurements. To obtain a greater influence of communication between the estimators, the number of sensors are further reduced. For the demonstrator building, some of the sensors are required for experimental validation. Furthermore, it is important to reduce the number of sensors to a minimum, such that the sensor concept for state estimation remains feasible for further practical applications. For this purpose, sensor placement is performed. Based on the approach in preliminary work on actuator and sensor placement in (Heidingsfeld et al. Citation2017; Rapp et al. Citation2017), a Gramian-based greedy algorithm is applied. This algorithm is especially well suited for combinatorial problems and according to (Zeller et al. Citation2022) yields results comparable to those of much more complex approaches such as genetic algorithms. In the original and reduced sensor setup by the sensor placement algorithm is shown. These measurements are summarized in the output vector
which is related to the state by the output matrices
for the strain gauges and
for the camera system as described in (Stiefelmaier et al. Citation2023).
III. Decentralization and model reduction
In general, there are two approaches to deriving decentralized models. In the bottom-up approach, the individual substructures are modeled directly. This model must take the coupling forces between the individual substructures into account. In the top-down approach, individual decentralized models are derived from an overall model, such that the coupling forces are inherently considered. The latter approach is followed in this contribution. To obtain a decentralized state representation, the SEREP-Guyan transformation is used. The following procedure is based on (O’Callahan et al. Citation1989) and similar to the steps taken in (Warsewa et al. Citation2020b). Additionally, a model order reduction by means of a modal analysis is performed to further reduce the computational effort.
A. SEREP-Guyan transformation
The SEREP-Guyan transformation consists of several steps. First, the DOFs are reordered according to the respective substructure. Second, the actual transformation is performed, which is a combination of the Guyan and SEREP transformation. The latter is used for a better approximation of the dynamics, since the Guyan transformation does not consider the mass of the system in the transformation and is generally very sensitive to the selected active DOFs.
For any subsystem , the global DOFs
are reordered into
The vector contains the active DOFs. These are the DOFs corresponding to the
-th subsystem. The remaining DOFs are denoted as dependent DOFs and are summarized in
. Note that for every permutation matrix
the equation
holds. The mass and stiffness matrix are rearranged according to
As a next step, a static condensation, the Guyan reduction
is performed by using the transformation matrix . Assuming the stationary condition
of the undisturbed system, the transformation matrix follows from the dependence of
on
. The procedure leads to exact solutions in static analysis but does not preserve the mass of the system. This fact can cause large errors for high frequencies (Flodén et al. Citation2014). To address this problem, the condensation is combined with the SEREP transformation. This transformation preserves the dynamics of a reduced number of the full system’s eigenmodes and frequencies (Flodén et al. Citation2014). A modal analysis of the model in (1) is performed and the reduced eigenvectors
and eigenamplitudes
are determined. Thus, the vector
is approximated by
Here, the eigenvectors and
correspond to the active and dependent DOFs. By using the generalized inverse
, the SEREP transformation is performed by
with the transformation matrix . Then, the hybrid transformation is given as
and the global DOFs are obtained by
For a detailed development of the transformation refer to (O’Callahan et al. Citation1989). By substituting (10) into (1) and left-multiplying with , the linear equations of motion for the subsystem
become
The distribution matrix is obtained by taking the columns of
corresponding to the control input of the subsystems' actuators
. As disturbance, only the vertical load on each level
is considered to be known to the estimation algorithm.
B. Model order reduction
Since the amount of the DOFs for one subsystem can still be large – and thus disadvantageous for real-time estimation – a model order reduction by means of a modal analysis is applied. The transformation is given by
where the matrix contains the first
eigenvectors of (11), normalized for
. By means of the modal state
the state
is introduced and the model (11) can be rewritten as a first-order ODE-system
The relation between the global state and the state of the subsystem
is given by
with the transformation matrix . The output matrix
of the
-th subsystem is obtained by transforming the local output matrix
, which contains all optical measurements and only the locally accessible strain measurements. In this context, locally accessible means measurements that only rely on the corresponding substructure’s states. Since the measurements of the camera system are processed on a central control unit, they are assumed to be communicated via bus and accessible to all subsystems. The matrix
is derived from the central output matrix
by choosing only the rows of the corresponding locally accessible measurements.
C. Substructuring
In order to partition the building into substructures, elements that interact strongly with each other are grouped together. For a suitable choice, an interaction analysis is required. In this case, the RGA is used, which is an interaction measure for the coupling between an input and an output
. A detailed description of the procedure is beyond the scope of this contribution and is introduced in (Bristol Citation1966). In the case of the high-rise building, the influence of the actuators on the element’s normal forces is investigated. The substructures are chosen such that each substructure has at least two actuators. All truss elements within one structure must be connected. The latter is particularly relevant for elements on which the actuators have small influence, e. g., elements modeling the floor. In principle, a trade-off must be made when choosing the number of substructures. Smaller substructures lead to less computational effort for decentralized state estimation, however, fewer measurements are available to them. The substructures resulting from the RGA analysis for different numbers of individual substructures
are shown in . Since the states are assigned to the nodes, overlapping decentralized states are created.
IV. State estimation
Due to the high number of sensors, observability is given for each substructure. For state estimation, a discrete-time IF is applied. Therefore, the continuous state space representation of (16) must be transformed into a discrete one. For this purpose, the time steps for
and sampling time
are introduced. The transformation is achieved by means of an exact time-discretization using the matrix exponential. According to
respectively , the decentralized and discretized systems and input matrices are derived. For all non-estimated variables, a at time
is written as
. In the following, the notation
describes the variable
for subsystem
estimated at time step
.
A. Information filter
The decentralized state estimator is designed with the assumption of known control inputs. This is appropriate for the application presented, the demonstrator building with integrated actuators. However, disturbances such as wind are unknown to the estimation model. Only the surface load is assumed to be a known disturbance. The decentralized state estimator is based on the following model
The estimation model assumes that the state and the measurements are overlaid by process or measurement noise and
, which are multivariate zero-mean normally distributed. The initial conditions are chosen as
whereas the matrix describes the estimation error covariance matrix. According to (Mutambara Citation1998), the information space is especially convenient for decentralized estimation due to its structural and computational simplicity. Instead of a state, the so-called information state is estimated. Information can easily be exchanged between the decentralized estimators and used additionally in the estimation algorithm. The following algorithm is based on the steps in (Mutambara Citation1998). The information state
is obtained by the transformation
whereas denotes the information matrix. Like the Kalman filter, the IF algorithm is divided into a prediction and correction step. The a priori estimation is given as
by means of the local propagation coefficient
The matrix is defined a priori as a design variable and describes the covariance matrix of the process noise. High covariance values reflect greater uncertainties in the model. Next, the estimate is corrected by the measurements
. The measurements are transformed to the information space. For this, the local information state contribution and the associated information matrix
are introduced. Here, the matrix denotes the measurement noise covariance of the available sensors in subsystem
. The correction step is stated as
Note that for the a posteriori estimation of the -th subsystem, the measurements which are assigned to the
-th subsystem and any other information from the subsystems
can be used. For this purpose, the information of the
-th subsystem must be transformed to the information space of the
-th subsystem using the generalized inverse
Depending on the network topology, not all information is shared. Therefore, the equations in (21) and (22) must be adapted accordingly.
B. Communication network topology
In principle, there is an infinite number of variations how the IFs could communicate with each other. Different measurements can be taken into account and communicated in the local information state contribution . Here, following networks are investigated:
independent (ind) – no information is shared
partially connected (pc) – information of all optical measurements as well as strain measurements of elements that are connected with the neighboring substructure will be shared
fully connected (fc) – all locally accessible information is shared with all substructures.
In general, for the decentralized estimation, a choice of the model size has to be made. Small models lead to computational efficiency whereas large models lead to an increased accuracy together with redundancy for fail-safe operations due to more information (Warsewa et al. Citation2020b). Note that in contrast to (Warsewa et al. Citation2020b), the pc-estimator is not communicating all information to the neighbors. Instead only the information corresponding to connected elements is shared. Here, the fc-estimator is primarily intended to serve as a comparison. Since all information must be sent and a lot of redundant information is shared, the advantages of a decentralized approach over a centralized estimator are reduced when all information is shared.
V. Numerical results
This section describes the simulation study and its results in terms of estimation accuracy and robustness. The simulation parameters are given and the error measure for evaluation is introduced. This is followed by a comparison of the different network topologies and substructures. Finally, the network topologies are examined in the event of a failure in information transmission.
A. Simulation parameters
To evaluate the performance of the IFs, a simulation model of the adaptive high-rise demonstrator building is used. The structure has a height of on a square base of
. It is modelled using
DOFs and has
actuators. The disturbance is modelled with a dimension of
, which is composed of the surface load on each of the twelve storeys and the wind disturbance in the four cardinal directions. Since the diagonal bracings each comprise three floors, they are denoted as modules and numbered from bottom to top. For simulation, the control input is set to
. The system is simulated for
. A mean wind velocity of
is used for excitation, which corresponds to wind of force 12. The mean wind speed and wind direction are shown in . These are chosen such that a maximum displacement of
is not exceeded. For this kind of structure, regardless of the excitation, it can be assumed that mainly low eigenfrequencies are excited. Therefore, the methods presented are also applicable to other conceivable excitations such as from earthquakes.
In total, strains by the strain gauges and
displacements by two cameras are measured. The simulation superimposes additive white Gaussian noise, using the standard deviations
and
, respectively. All measurements are provided at a frequency of
. All estimators use a frequency of
which results in a sampling time of
.
All estimators are initialized with . In addition to the decentralized estimators, a centralized IF with
modes is simulated for comparison. The
eigenfrequency is at
, which is far below the Nyquist frequency. Regarding the decentralized estimators and the SEREP-Guyan reduction,
is used. For the modal reduction,
for large substructures and
for small substructures are chosen (see ). Here, small substructures are the substructures in the second module, or for
also the substructures in the first module (see ). This choice was made to keep the number of modes modeled for the whole system comparable between the simulation scenarios.
Table 1. Modeled modes for the substructures from bottom to top (compare to ).
Since uncorrelated noise is considered, the covariance matrices are chosen as diagonal matrices. The measurement noise is considered to be known and the matrix is chosen according to
with the identity matrix , respectively
. As design parameter, the matrix
is set to
with the coefficients ,
and the identity matrix
. With regard to the model, greater confidence is placed in the displacement than in the velocity, since the variances with respect to velocity are generally larger.
B. Error measure
The following error measure is used to evaluate the estimation
where the function averages over all DOFs. The root mean square (RMS) error is a commonly used error measure that takes whole time series of the error into account. It has the advantage that smaller variations and noise do only have a minor impact on the error. One could also choose the maximum error as performance measure, which is relevant for state control. However, it is not sufficient to evaluate the overall performance of the state estimators. As the maximum error of a decentralized filter can, for example, occur with respect to a DOF, which is estimated by overlapping several filters. In this case, this error could be reduced by averaging the estimation. In the following section, only the translational DOFs are examined. Since each estimator reconstructs the global state by transformation, only the respective local estimates of the decentralized estimators are taken into account and combined to the global estimated state. The estimation of DOFs that are part of multiple substructures is calculated as the average over all estimated values.
C. Comparison of the different network topologies and number of substructures
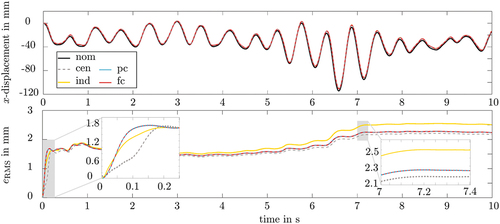
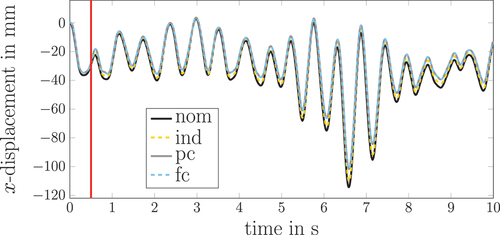
shows the -displacement and RMS error of the
-node with
. As can be seen, all filters estimate the displacement correctly and no significant performance improvement by communicating information can be observed. As expected, the centralized estimator has the shortest convergence time and the smallest estimation error.
Figure 4. Comparison of the nominal and estimated displacements and the RMS error of the node.
compares the RMS error of the displacements and velocities. For larger , the error in the displacements increases for the communicating estimators, whereas the ind-estimator shows no dependence on
. For
, the network topologies are comparable, but with more substructures, the communication leads to worse estimations than no communicating. The pc- and fc-estimators reconstruct the velocity most accurately with
. However, with
the velocity cannot be reconstructed qualitatively correctly in case of the pc-estimator. The reason for this is that the velocity in the second module cannot be reconstructed correctly due to the small substructures here. The estimation of the velocity is negatively affected by the shared information of the neighboring substructures. The estimation error for the velocity of the ind-estimator decreases with more substructures. The reason for this is that there are more modes modelled in total as each substructure is simulated with at least
modes. Comparing
to
, the number of modes does not increase (see ), so a similar accuracy is achieved. As far as the network topology is concerned, it can be seen that the pc- and fc-estimators yield very similar results for the displacement and velocity, with hardly any advantage in communicating all the information.
Figure 5. Comparison of the RMS error of the displacement and velocity for different network topologies and substructuring.
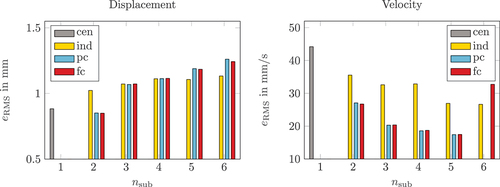
Comparing the centralized with the decentralized estimators, the RMS error of the displacements is higher when using the decentralized estimators, except for with the pc- and fc-estimator, but lower for the velocities. It should be noted that the centralized estimator is only used for rough comparison. Although the design parameters are identically chosen, they are weighted in modal space. The estimation error in the displacements increases, since the strain measurements are particularly relevant for these. With a higher degree of decentralization, fewer measurements are available for the displacement estimation. However, it should be emphasized that with
the estimation error of the displacements and the velocities are smaller than with a centralized approach, although the same total number of modes is used for estimation. The approximation of the overall system with two times six low-frequency modes each, for
, is advantageous compared to the centralized approximation with the first twelve modes. Due to the decentralization and subsequent modal transformation, more states are available to the low frequencies than with a centralized approach.
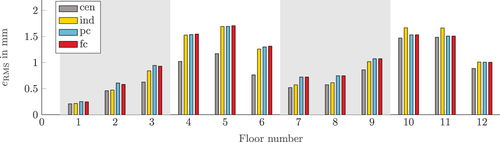
compares the RMS error of the estimated displacements of each storey regarding different network topologies with . Especially in the second and fourth module, larger estimation errors occur. In general, this is not due to the model size or the sensor placement, as this effect can also be observed for decentralized estimators with equally sized substructures or with more sensors. The fourth module has the largest amplitudes, which are underestimated by the estimators. In the fourth module, the largest error reductions are achieved by means of communication, while the overall estimation of the ind-estimator is slightly better than that of the pc- and fc-estimators.
Figure 6. Comparison of the RMS error for different network topologies and .
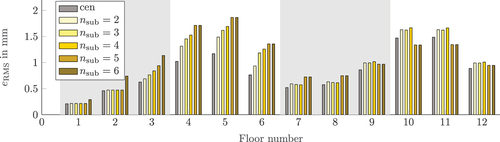
The significance of finding a suitable substructure layout for state estimation can be seen in , which shows the RMS error for the ind-estimator. Largest differences between the estimates are found in the top floor of the first and the second module. With increasing the error increases. Looking at , it can be concluded that the smaller the substructure the worse the estimation. The same effect can be seen for
in the first module. Since the first module contains two substructures in this layout, the estimation error increases, although the total number of modes modelled is the same as with
. In the fourth module, better results are obtained for
and
, since the highest substructure becomes smaller with increasing
, while still being modelled with six modes.
Figure 7. Comparison of the RMS error for different amount of substructures and the ind-estimator.
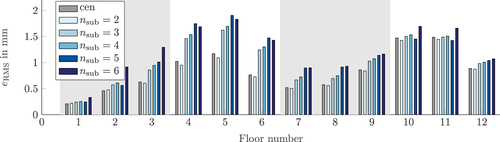
For the pc-estimator, the substructuring is even more important, as can be seen in the . With two substructures the estimation is better than with the centralized estimator. For this substructure layout the communication of the information to the top substructure is very beneficial. For the communication of the second substructure has a negative effect. As the number of substructures increases, the decentralized estimation error increases, analogous to the ind-topology. With
, larger estimation errors occur in the fourth module, although the highest substructure has the same configuration as with
. The communication of the substructures in the first module affects the estimation of all other substructures, which has a negative effect on the highest substructure, as can be seen in a comparative simulation without this communication. For layouts with
, sharing the information of the lowest substructure with the highest substructure is especially advantageous and leads to results that are comparable to the centralized estimator in the fourth module.
Figure 8. Comparison of the RMS error for different amount of substructures and the pc-estimator.
D. Robustness
In case of a faulty information transfer, the estimator still have to reconstruct the state correctly. shows the displacement of the node with
, marked in , in the case of failed communication with the third substructure (red substructure in ). Here, this substructure provides a zero vector as information. The estimators converge and provide a sufficient estimation, but the failure leads to an underestimation of the minimum values by the communicating estimators. This is because the information matrix is still included in the state estimation. It is therefore necessary to detect the fault in order to adapt the information matrix. If the communication with other substructures fails, the offset between the estimation and the nominal simulation increases. As expected, the error is larger for the pc-estimator, since the fc-estimator has more information available and therefore is able to better compensate for the missing information.
Figure 9. Comparison of the nominal and estimated displacements of the -th node in case of lacking information transfer.
VI. Conclusions
Decentralized estimators offer various practical advantages. So far, decentralized models for state estimation have been derived by symmetric partitioning of the demonstrator building. Since an intuitive substructuring is not possible for adaptive structures as e. g., bridges or non-symmetrical buildings, this work considered substructures based on partitioning by the RGA and investigated their suitability for state estimation. For this purpose, the model was derived using SEREP-Guyan and modal reduction and different IFs were implemented. In addition, different network topologies were investigated. In general, the following results can be extended to other adaptive structures, provided that the model on which the estimator is based correctly reflects the effects that occur. In strongly coupled systems, model errors may arise due to decentralization, but these can be counteracted by more sensors or communication between the estimators.
The non-communicating estimator shows almost no dependence on the substructure layout. In comparison, communicating estimators are especially advantageous when there are few and large substructures. It is shown that the decentralized estimation can even be better than the centralized one, since the decentralization provides more states for the dominant low frequencies. Decentralization can therefore be particularly useful for practical applications where the eigenfrequencies and eigenmodes cannot be exactly approximated. As the number of small substructures increases, the estimation of communicating filters deteriorates compared to the ind-estimator. Therefore, communicating estimators are recommended for large substructures. The fc-estimator has no advantage over the pc-estimator, so the pc-topology is sufficient. As the number of sensors increases, communication becomes less important, so that the ind-topology can also be considered. In case of a communication failure, the pc- and fc-estimators provide qualitatively correct values. However, the estimation can be further improved by fault detection and adjustment of the estimation algorithm accordingly. Future work will investigate larger adaptive structures, for which communicating estimators are more of a necessity or symmetric substructures are not feasible. Furthermore, a decentralized disturbance estimator will be implemented. This aims to reduce estimation errors due to unknown wind or other disturbances when combined with the decentralized state estimators.
Acknowledgments
This work was supported by the German Research Foundation (Deutsche Forschungsgemeinschaft, DFG), as a part of the Collaborative Research Center CRC 1244 (SFB 1244) “Adaptive Skins and Structures for the Built Environment of Tomorrow” – Project-ID 279064222 – Project B02.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
- Bakule L, Papík M, Rehák B. 2014. Decentralized stabilization of large-scale civil structures. IFAC Proc. 47(3):10427–10432. doi: 10.3182/20140824-6-ZA-1003.00692.
- Bristol EH. 1966. On a new measure of interaction for multivariable process control. IEEE Trans Automat Contr. 11(1):133–134. doi: 10.1109/TAC.1966.1098266.
- Department of Economic United Nations and Population Division Social Affairs. 2019. World urbanization prospects: the 2018 revision (ST/ESA/SER.A/420). (NY): United Nations.
- Flodén O, Persson K, Sandberg G. 2014. Reduction methods for the dynamic analysis of substructure models of lightweight building structures. Comput & Struct. 138:49–61. doi: 10.1016/j.compstruc.2014.02.011.
- Gienger A, Wagner J, Böhm M, Sawodny O, Tarín C. 2021. Robust fault diagnosis for adaptive structures with unknown stochastic disturbances. IEEE Transactions on Control Systems Technology. 29(3):1131–1146. doi: 10.1109/TCST.2020.2993068.
- Heidingsfeld M, Rapp P, Böhm M, Sawodny O. 2017. Gramian-based actuator placement with spillover reduction for active damping of adaptive structures. 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM); Munich, Germany. IEEE. p. 904–909.
- Lenis L, Giraldo M, Espinosa J. 2015. Comparison of RGA-based decomposition methods for large-scale systems distributed state estimation. 2015 IEEE 2nd Colombian Conference on Automatic Control (CCAC); Manizales, Colombian. IEEE. p. 1–7.
- Mallory GJ, Miller DW. 2000. Decentralized state estimation for flexible space structures. J Guid, Control, and Dyn. 23(4):665–672. doi: 10.2514/2.4582.
- Mutambara AGO. 1998. Decentralized estimation and control for multisensor systems. Boca Raton, Florida, USA: CRC press.
- O’Callahan J, Avitabile P, Riemer R. 1989. System equivalent reduction expansion process. Proceedings of the 7th International Modal Analysis Conference; Las Vegas, Nevada, USA.
- OECD. 2019. Global material resources outlook to 2060. Paris: OECD Publishing.
- Ostertag A, Dazer M, Bertsche B, Schlegl F, Albrecht S, Leistner P, Gienger A, Wagner J, Tarín C, Sawodny O. 2020. Reliable design of adaptive load-bearing structures with focus on sustainability. Proceedings of the 30th European Safety and Reliability Conference and 15th Probabilistic Safety Assessment and Management Conference; Venice, Italy. p. 1–5.
- Puerto Tchemodanova S, Sanayei M, Moaveni B, Tatsis K, Chatzi E. 2021. Strain predictions at unmeasured locations of a substructure using sparse response- only vibration measurements. J Civ Struct Health Monit. 11(4):1113–1136. doi: 10.1007/s13349-021-00476-x.
- Rapp P, Heidingsfeld M, Böhm M, Sawodny O, Tarín C. 2017. Multimodal sensor fusion of inertial, strain, and distance data for state estimation of adaptive structures using particle filtering. 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM); IEEE. p. 921–928. doi: 10.1109/AIM.2017.8014136.
- Siljak DD. 2011. Decentralized control of complex systems. Boston, USA: Courier Corporation.
- Stiefelmaier J, Dakova S, Stein C, Böhm M, Tarín C, Sawodny O. 2023. Reconfiguration of an adaptive structure’s control loop based on diagnosed sensor and actuator faults. J Struct Eng. 150(4). ( manuscript submitted for publication). doi: 10.1061/JSENDH.STENG-12638.
- Strutt Baron Rayleigh JW. 1896. The theory of sound Vol. 2. London, England: Macmillan.
- Sun Y, Lu Y, Song Z. 2023. Review on the theories and applications of dynamic condensation and component mode synthesis methods in solving FEM-based structural dynamics. Acta Mechanica Solida Sin. 36(3):361–389. doi: 10.1007/s10338-023-00383-2.
- Tatsis K, Dertimanis V, Abdallah I, Chatzi E. 2017. A substructure approach for fatigue assessment on wind turbine support structures using output-only measurements. Procedia Eng. 199:1044–1049. doi: 10.1016/j.proeng.2017.09.285.
- Tatsis K, Dertimanis VK, Papadimitriou C, Lourens E, Chatzi EN. 2021. A general substructure-based framework for input-state estimation using limited output measurements. Mech Syst And Signal Process. 150:107223. doi: 10.1016/j.ymssp.2020.107223.
- United Nations Environment Programme. 2022. Global status report for buildings and construction: towards a zero-emission, efficient and resilient buildings and construction sector. Nairobi: United Nations.
- Warsewa A, Böhm M, Rapp P, Sawodny O, Tarın C. 2019. Decentralized and distributed observer design for large-scale structures using dynamic condensation. 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE); Vancouver, BC, Canada. IEEE. p. 1256–1262.
- Warsewa A, Wagner JL, Böhm M, Sawodny O, Tarín C. 2020a. Decentralized LQG control for adaptive high-rise structures. IFAC-Papersonline. 53(2):9131–9137. doi: 10.1016/j.ifacol.2020.12.2154.
- Warsewa A, Wagner JL, Böhm M, Sawodny O, Tarín C. 2020b. Networked decentralized control of adaptive structures. J Commun. 15(6):496–502. doi: 10.12720/jcm.15.6.496-502.
- Weidner S. 2020. Grundlagen für die Planung von ressourcenminimalen urbanen Strukturen. doi: 10.18419/opus-10976.
- Xu Q, Ruan X, Zhen X, Dai Y, Kang X, Hu J. 2022. Research on subsystem division scheme of overlapping decentralized control strategy. Syst Sciamp; Control Eng. 10(1):910–921. doi: 10.1080/21642583.2022.2145518.
- Ying Lei Y, Wu DT, Lin Y. 2012. A decentralized control algorithm for large-scale building structures. Comput Aided Civ Eng. 27(1):2–13. doi: 10.1111/j.1467-8667.2010.00707.x.
- Zeller A, Böhm M, Sawodny O. 2022. A genetic and a greedy-genetic algorithm for steady-state disturbance compensability actuator placement for adaptive structures. 2022 American Control Conference (ACC); Atlanta, Georgia, USA. IEEE. p. 4620–4626. doi: 10.23919/ACC53348.2022.9867664.