
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Current topological and geometrical distances in Space Syntax are based on the premise that each change of direction along a path is a mental cost because one loses orientation. This paper proposes to extend the analysis to the case in which esthetic and variety, rather than orientation, are the key elements of street selection. It is widely recognized that most people are attracted to curvy paths rather than straight ones; therefore, when one is not worried about losing orientation in her walk, or when the preferred path is well recognizable even when it requires changes of direction, we should adopt another criterion to weigh distances: morphoahestetic and networkvariety criteria are shown as potential parameterization for Space Syntax distances.
1. Introduction: distances and angular preferences in Space Syntax
In the second half of the 1970s, Hillier and colleagues at University College London started thinking about a set of theories and techniques to analyze spatial configurations, connections, and relations between spaces, and their social effects as movements within them.
One of the major purposes of space syntax is to understand the influences of spatial configurations on social life. (Oliveira, Citation2016, p. 124)
One of the strengths of Space Syntax is its parsimony as it only considers the geometry of the street pattern without any other contents (land use, esthetic, transports, etc.), allowing a fast, cheap, and objective analysis (apart subjectivism in manual translation from streets to axial lines, or some theoretical issues when this process is automatically generated from the road center line).
It treats the urban street pattern itself as generator of (let’s add “potential”) centralities (street centralities and also functional centralities) and (potential) flows (pedestrians, car movements) on its own.
Space Syntax’s main pillars are the measure of street integration and choice.
The integration of a street (a street, once defined in its unit, could be called segment or space or line) says how easy it is to get to that segment from all other segments; it is a measure of the to-movement potential having the segment as destination. The choice (betweenness) of a segment says how likely one is to pass through it while moving throughout the city; it measures the potential that a segment has to be a route from-to all the other segments: through-movement potential.
The foundation of the above two pillars is the concept of depth: “depth exists wherever it is necessary to go through intervening spaces to get from one space to another” (Hillier & Hanson, Citation1984, p. 108). We can think about depth in terms of distance, or steps: how distant, how many steps a certain segment (space) is from the others, where steps are direction changes of segments or are proportional to the magnitude of angular deviation.
The way to identify when a segment is one segment, and when one step is one step is crucial as all the further calculations are based on it.
If we define one segment in terms of axial line, meaning the longest line we can draw all in once along a street, also defined as the minimal set of the fewest and longest lines of sight on the street layout; and if we count one step as 1 when you go from one segment to another segment intersecting it (topological distance), we understand that a long straight street would be represented as one line and would be overvalued in comparison to sinuous, curved streets as the latter are represented by a certain number of straight axial lines, much greater than just one; namely each segment is more distant from the other segments, as more steps are separating them.
The integration (I) of an axial line i, is a function of its depth related to all the other axial lines (how many steps are distant from all the others). The latter is “calculated by assigning a depth value to each space according to how many spaces it is away from the original space, summing these values and dividing by the number of spaces in the system less one” (Hillier & Hanson, Citation1984, p. 108).
The calculation behind I is (Rashid, Citation2017, p. 64)
where n is the number of axial lines in the urban street area considered, dij is the shortest distance (least number of steps) between two axial lines i and j.
From Eq. (1), it is clear how dij (depth) is treated as a cost,Footnote1 in fact it is at the denominator of the fraction: the greater the number of steps (dij) among streets (axial lines), the lower the integration (Ii).
The calculation behind choice (or betweenness), C, of an axial line i is
where is the number of shortest paths between lines j and k containing i, and
is the number of all shortest paths between j and k (Rashid, Citation2017, p. 64).
Also from Eq. (2), we see how the definition of shortest paths plays a central role in determining the numerical value of choice: having a high number of axial lines in between (namely having to turn several times, as for a sinuous route) is seen from Eq. (2) as at cost, in fact it considers only the shortest paths (minimum number of steps, or of turnings, from lines j and k).
In the segment analysis (axial lines are broken into segments [which here we can still call lines] each time they cross each other), this problem is mitigated as distances are weighted (Turner, Citation2007) in relation to the angle between lines (geometric distance): the greater the angle, the greater the value of the distance among the lines, from 0 (no turn) to 2 (180° turn); if the angle is 0°, the distance is 0 too, namely it is considered as a same line instead of two; if the angle is 90° the distance is 1, if the angle is 45° the distance is 0.5, and so on. However, the assumption that people prefer to change angle as little as possible is still on the basis of the calculation of distance (the greater the angle between two lines, the greater their distances) or on the identification of lines (each small turn, out of the lines of sight, brakes the street into several lines).
The angular integration (AI) of a segment x is
where n is the number of lines (segments) and is the angle between any two segments on the shortest path on segment x (Rashid, Citation2017, p. 66).
If we weight by the length of segments
where l is the length of segment (Rashid, Citation2017, p. 66). Even if we choose only the Euclidean option (metric distance: meters between the centers of neighboring lines), instead of topologic or geometric, to measure distances among lines, if we decided to break a street into three lines instead of one, because it is sinuous, the resulting number of steps (distance, depth) among lines are altered anyway because we are measuring distances among lines that would not have existed, or vice versa.
Criteria to define lines (among an immense literature, see for example, Porta, Latora, & Crucitti, Citation2012 or Batty & Rana, Citation2002) and distances (among many others, see for example, Batty, Citation2004; Bera & Claramunt, Citation2003; D’Acci, Citation2015; Feng & Zhang, Citation2017) are therefore crucial.
Space Syntax’s integration and choice base their, respectively, “how easy it is to get to” and “how likely one is to pass through” in relation to “shortest journey routes between each link [or space] and all of the others in the network (defining ‘shortest’ in terms of fewest changes in direction)” (Hillier, Citation1998, p. 36). This assumption that people prefer moving through routes with as few changes of direction as possible permeates Space Syntax’s main idea:
[…] human movement followed least angle change paths and not shortest paths (the most likely explanation being that people use an angular geometric model of their environment to calculate distances), so the least angle change definition of distance is the default setting in DepthMap (Hillier & Iida, Citation2005). Large numbers of studies have failed to suggest any reason why this should be changed. (Hillier, Citation2009, p. 4)
Again in Turner (Citation2007, p. 540), we read,
[…] the sum of the angles turned from the starting segment to any other segment within the system […] This angular sum is treated as the ‘cost’ of a putative journey through the graph, and from it a shortest (that is, least cost [namely least turns]) path from one segment to another across the system can be calculated.
However, while this aim to minimize the change of directions for orientation issue has been often demonstrated and it is also in line with common sense, this certainty that people always define “shortest” (mentally shortest) in terms of fewest changes in direction needs more attention in a ceteris paribus context. In fact, “changes in direction” may not add complexity in mental orientation in the following, at least, three cases:
because of a continuous (no intersections) path;
or inside an easily recognizable path (regardless of how many times and how much one should turn or meet intersections);
or because the pedestrian knows the area by heart.
Different methods and supporting theories are used to define distances related to street geometries, and in this paper we want to explore if the assumption that paths with least changes of direction are preferred, and also felt as shorter, against paths with greater changes of direction.
2. Esthetical preferences: some implications for Space Syntax
“Factors influencing walking behaviours related to physical built environment attributes are listed, among many authors, in Hodgson, Page and Tight (Citation2004), Wang, Chau, Ngb and Leung (Citation2016), Frank, Schmid, Sallis, Chapman and Saelens (Citation2005), Owen et al. (Citation2007), Shigematsy et al. (Citation2009), Owen, Humpel, Leslie, Bauman and Sallis (Citation2004), Giles-Corti and Donovan (Citation2002), Inoue et al. (Citation2010), McCormack et al. (Citation2004), Van Dyck et al. (Citation2013), Lopez and Hynes (Citation2006), Ball, Bauman, Leslie and Owen (Citation2001), King et al. (Citation2000), Ferrer López, Ruiz Sánchez and Mars (Citation2015), Cullen (Citation1971). Modelling approaches to route choice have been explored by, among many, Papadimitriou, Yannis and Golias (Citation2009), Xi and Son (Citation2012). Specifically focused on perceptions of street shapes are Agrawal, Schlossberg and Irvin (Citation2008), Beryline (Citation1974), Hagerhalla, Purcella, Taylor (Citation2004), Taylor, Spehar, Van Donkelaar, Hagerhall (Citation2011). Observations supporting that people tend to conserve linearity in their routes are in Dalton (Citation2003), Hillier (Citation2007), Tolman (Citation1938), Sadalla and Montello (Citation1989), Montello (Citation1991), Miller (Citation1956), Zacharias (Citation2001) […] Jansen-Osmann and Wiedenbauer (Citation2004) suggest that people perceive as longer the routes with more turns […], while authors emphasizing people preferences toward more curved streets stimulating curiosity and mystery, are Kent (Citation1989), Herzong and Miller (Citation1998), Matsumoto, Koyanagi and Seta (Citation1997), Kaplan (Citation1987, Citation1988), Bell, Greene, Fisher and Baum (Citation2001), Ewing and Handy (Citation2009).” (D’Acci, Citation2019)
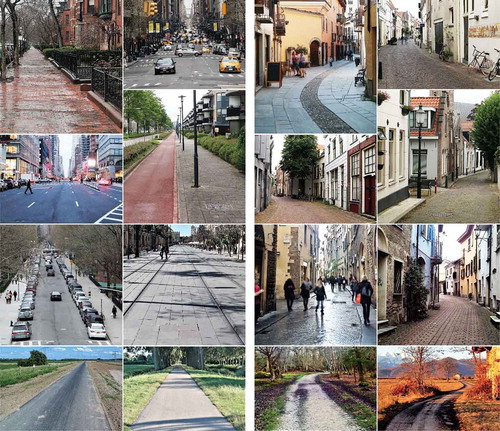
shows examples of straight and curvy streets, even if not directly comparable among themselves because of different street sizes, contents, façade, land use, cars/pedestrians, etc.
Figure 1. Source: Author’s photo from Dordrecht, Boston, New York, Delft, Rotterdam, Caraglio, Brockenhurst, Florence, Susa, Deventer, Seville, and Saliceto.
Going back to Space Syntax, “[…] the topology of relations between lines of sight […] is in essence what space syntax is all about” (Batty, Citation2004).
As Batty, also Porta et al. (Citation2012) more recently reminded us that “the two pillars of the space syntax castle” are “the dual representation and the generalization model”; where for dual representation is meant the translation from streets into nodes and from intersections into edge in a graph network (see as example , graphs 5a,b,c in Porta et al., Citation2012); and for generalization is meant the complexity reduction process where streets are merged following specific principle of continuity. In the standard Space Syntax, the latter is the “straightness” (line of sight, unobstructed movement, no change of angle among adjacent segments, etc.) of street spaces.
Figure 2. Street preferences versus Space Syntax measures.
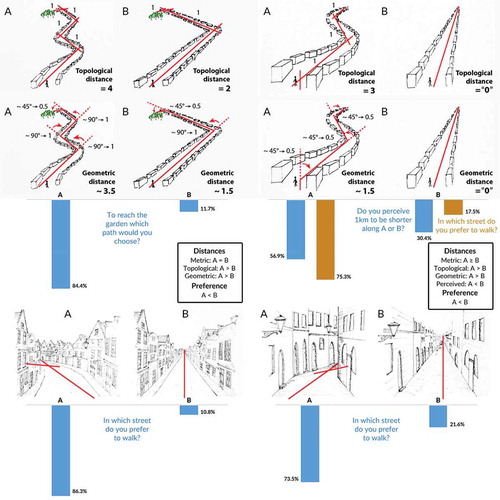
Figure 3. Route preferences under alternative criteria.
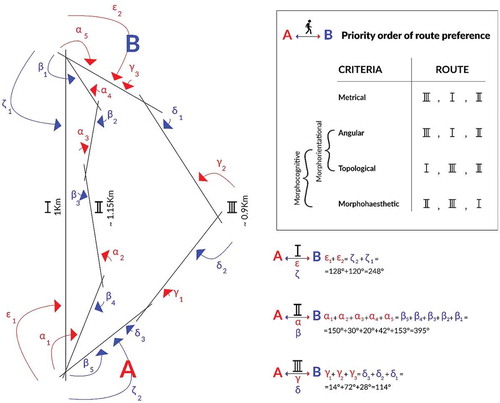
Figure 4. Three possible routes, among many, have been compared: Route I (red), Route II (violet), and Route III (green). Streets A and B are the streets of origin and destination. On the bottom right of the image the total angles are shown between A and B (the double arrows linking A and B) along the three different routes (each indicated above the double arrows).
The criteria selected to generate the dual representation of street network and the principle of continuity are at the very base of everything else built on it (as centralities indicators):
network centrality measures, such as […] closeness and choice […] are based on the calculation of shortest routes and attempt to model human movement, they should incorporate how we judge distances. In traditional space syntax distance is measured by the angular change accrued at junctions along a route and elsewhere it is often measured as the physical length of the route. (Frith, Citation2017)
The conceptual and computational pillar of Space Syntax’s conception of distance – which in turn is the base to calculate its main network centrality measures (integration and choice), whatever in axial or angular segment analysis – is that changing direction is a cognitive cost, therefore increases the mental distance.
According to the classical axial analysis of Space Syntax, the garden on the top left in is cognitively more distantFootnote2 (route A) than the garden in the same figure on its right (route B); however, 84.4% of 102 respondents of a questionnaire (D’Acci, Citation2019) saidFootnote3 to prefer route A to reach it by walking, and only 11.7% B route, while for 3.9% was indifferent.
In the same way, axial analysis says that the end of the route A in top right is more distantFootnote4 than the one on its left (route B); however, 75.3% of the same respondents preferred A instead. In an additional question about the perceived length, it also emerged that for 56.9% of respondents A is perceived as shorter than B, for 12.7% as equally long, while only 30.4% felt B to be shorter (D’Acci, Citation2019).
The above analysis offers an occasion of reflection and possible improvement in the techniques buildable in future Space Syntax computations in order to be able to enlarge the applications of models.
Route angularity and complexity-minimizing paths suggest that pedestrians, consciously or not, tend to reduce as much as possible the number and the angle of turns when selecting routes.
This is truth for pedestrians not familiar with the area in which they are walking where the needed route is not easily recognizable when changing directions in intersections. Therefore, a crucial point is who is turning? The street or the pedestrian? And, in the case of the pedestrian
how much does the pedestrian know the area?
in the case of intersecting streets, how much the continuity of the – potentially desired – turning route is legible, regardless the number and magnitude of the turns and intersections?
This paper shows that sinuosity in continuous urban street layout geometry – meaning higher numbers and greater angles of turns along a street than an equivalent rectilinear street layout – is largely preferred from pedestrians as cozy, romantic, stimulating, creating a more enclosing and human scale feeling.
If this is the case, in methods such as Space Syntax, we should contemplate the opportunity offered, or addible, to Space Syntax and similar methods, to parameterize curvy paths in a way that (contrary to quasi-linear element or to the usual way to count turns as a cost) curvier means closer, not more distant (change in directions is a mental cost, as the “default” Space Syntax theoretical and computational foundation and its various parameterizations) than a roughly equivalent (in terms of metric distance) straight path, or equal to a straight path (as approximated in the quasi-linear elements).
Regarding Space Syntax and similar methods of street network morph-topological analysis, this paper opens up discussions (without aiming here in proposing solutions) on parameterization:
when a single street (continuous: without intersections) is curvy and axial line/s (and related segment/s from the associated segment analysis) “cut”, approximate it, measuring the street as less distant from the neighboring ones (by cutting the curve, each axial line less removes a step, as well as each segment less may – depending from the specific route geometryFootnote5 – reduce the total angle of the path);
when, within similar metrical distances, alternative paths (as a sequence of axial lines or segments, both across intersections this time) are present with different number of turns (axial lines/segments).
Case 1 happens with the quasi-linear approximation (see also the “pseudo-nodes” in in Stavroulaki, Marcus, Pont & Nilsson, Citation2017), where under a certain angular threshold between adjacent lines, the latter are considered as a single line;
Case 2 involves actual route decision points (junctions in the intersections).
The network of streets, the spatial relationships of connectivity, is based on depth, which in turn is based on how many steps (for topological analysis) one street is distant from the others (or how much the angles among them for angular analysis), which in turn means that the more axial lines (or the greater the angle, if in segment analysis) the greater the depth.
One of the reflections of this paper is the aim to test if it is always the best option to consider a curvy line (and also, with some precautions, a curvy chosen path) as several axial lines, as well as to weigh negatively the angles among segments. And as at the very base of all the above is the fact that people prefer to change direction as less as possible, here was tested if, when people don’t need to be worried about orientation, and complexity of paths, this assumption is still valid.
One of the main consequences of this paper, when applied to Space Syntax approach is related to the question: when to define a street as a single street (which principle of continuity to adopt)? As axial lines usually cut a “single” street into different axial lines that per definition are lines of sight, or segment analysis considers a cost proportional to the angle, even if you can parameterize this “cost.”
According to the results of this questionnaire (as simple as effective and whose potential theoretical and computational consequence may be rather relevant as radically inverting the way to count change of directions in centrality measures under the before mentioned situations), it would be worthy to investigate pedestrian preferences more in detail in further research, and if confirmed, to consider the option to rethink angle changes as a mental pleasure and shortening effect instead than the opposite,Footnote6 when we are evaluating pedestrian very familiar with the area or when the route potentially preferred is easily legible (or in the extreme case, physically continuousFootnote7 ) even if constantly turning.
The radical shift proposed in this paper is to consider angular deviation as a cognitive benefit rather than a cost. Angular choice currently
is calculated by counting the number of times each street segment falls on the shortest path between all pairs of segments within a selected distance (termed ‘radius’). The ‘shortest path’ refers to the path of least angular deviationFootnote8 (namely, the straightest route) through the system. (UCL Space Syntax 2018Footnote9 )
As well as AI “is the reciprocal of the normalised angular total depth.Footnote10 It can be compared across systems. It measures how close each segment is to all others in terms of the sum of angular changesFootnote11 that are made on each route” (UCL Space Syntax 2018Footnote12 ). Again, Choice, or Betweenness Centrality “is a measure for quantifying the probability that a street segment falls on a randomly selected shortest pathFootnote13 linking any pair of segments. Mathematically it is effectively the same as the space syntax measure of choice” (UCL Space Syntax 2018Footnote14 ). And, as we saw, shortest path, as for Integration from axial analysis, is again built on the concept of Depth which, for Space Syntax, is itself calculated by assuming each turn (each axial line) as a cost (greater Depth among streets/spaces), also from recent parameterizations of distances.
3. Discussion: orientational versus esthetic parameterization of distances
For all these reasons, we can label the topological (change of directions or not) and geometrical (magnitude of change of direction) distances as Morphocognitive Distances (McD), within which we ontologically and computationally separate two families of distances according to their object of applications: Morphorientational Distances (MoD) and Morphoaesthetic Distances (MaD); the former are those currently used from Space Syntax, considering change of directions as a cognitive costs because of reducing orientation,Footnote15 the latter as those whose this paper opens a discussion about and evaluates change of directions not from the point of view of orientation but from the appeal of different paths shape per se. “Morpho” because considering only the attractiveness coming from the forms of the street (for a single continuous street) or of the path (when selecting a certain sequence of streets), regardless to everything else (esthetic of facades, presence of shops, public transports, noise, amenities, etc.). If we merge the metrical distance (Euclidean Distances) together with the morphocognitive ones, we may call them as Euclidean Morphocognitive Distances.
where n is the number of axial lines (as indicator of how many times one changes directions), s is the number of segmentsFootnote16
having an angle different than zero among their adjacent ones, and is the angle between adjacent segments.
and show examples of comparisons among metric, topological, geometric, and MaD (depth) and choice.
If we want to be more precise, we may also distinguish between the two cases: continuous street (without intersections) and streets layout with a set of streets joining among each other. The first case falls in the abovementioned McD, while the second in the Networkcognitive distances (NcD) as implying an actual route decision in each intersectionFootnote17 among streets part of a networkFootnote18 ().
In this case we don’t talk anymore about the esthetic of the street shape (less or more curvy), but about the boredom of no changes of direction along your walk: McD are related to the visual boredom while NcD to the “psychological” boredom.
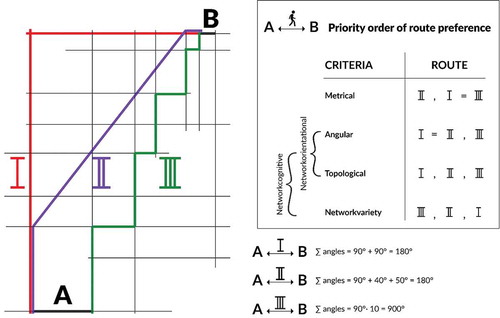
Within NcD, we distinguish, as before, Networkorientational distances (NoD) and Networkvariety distances (NvD). We call Networkvariety instead of Networkahestitic to underline that in this case the visual component is not involved, because the view you see for example at the beginning (from A to B) of Routes I–III is exactly the same, what changes is knowing that in one case you will walk all the time in the same scenario that you can see, while in another case not.
4. Conclusion
Space Syntax regards NoD and MoD, while this paper opens a discussion proposing NvD and MaD when the model is toward people knowing the areas, or not worry to get lost, or when the continuity of the potentially preferred (NvD or Mad) route is obvious or very well recognizable.
The questionnaire of doesn’t refer to networks of streets (NcD), but only McD; only a street shape was deliberately shown in the figures, instead of asking within a street pattern which street sequence people prefer.Footnote19
Further research should also test paths decision and in real urban context from the point of view of pedestrian knowing well the area, or aiming to randomly explore it. In fact, because of the possible difference between stated and revealed preferences, the former should be verified by empirically investigating actual pedestrian’s movement. However, it would be almost impossible to find streets/paths differing only in their shapes and to isolate the real motivations behind pedestrian’s decisions. The latter may decide a route not because of its shape but because of the contents (shops, services), the esthetics (façade, urban design), the accessibility (public transports stops, pedestrian areas, underground car park), the linkages between amenities (a street in between amenities), the quietness (congestion, crowded), and so on. Perhaps only with a 3D virtual reality could the above task be tested. The drawings enable us to hold fixed all the other factors while changing the shape of the street, so that the we limit the third variable problem. Similar research approaches (photorealistic montages, digitally calibrated images, visual stimuli, video-stated preferences, real photos) testing landscape esthetic preferences are used by Dachary-Bernard and Rambonilaza (Citation2012), Grammatikopoulou, Pouta, Salmiovirta, and Soini (Citation2012), Dramstad, Tveit, Fjellstad, and Fry (Citation2006), Arnberger and Eder (Citation2011), van Berkel and Verburg (Citation2014), Orland, Daniel, and Haider (Citation1994), Hagerhalla, Purcella, and Taylor (Citation2004), Taylor et al. (Citation2011), and Perdomo, Rezaei, Patterson, Saunier, and Miranda-Moreno (Citation2014).
The key concept for angular analysis is the idea that a body will turn as little as possible to achieve a route from A to B. That is, the body will choose the route which will result in the minimum change in direction […] Whether or not real bodies choose this route is not an issue to the angular analysis of a space, which is merely concerned with the quantification of a space in terms of its layout […] The complete prediction system might weight the number of locals to tourists, the numbers arriving at each tube station, those by car, and so on and so on. Angular analysis does not claim to be that prediction system, but merely a quantification of space useful to the prediction of movement or occupancy. (Turner, Citation2000, p. 3)
Therefore, as Turner wisely originally indicated, Space Syntax doesn’t directly aim to predict movement, but to quantify space, mostlyFootnote20 topologically.Footnote21 However, even if we want to stay on the purely topological dimension, therefore excluding any metrical and land use, transports, etc. in this paper, we open a discussion and further investigation about the fact that pedestrians mayFootnote22 not prefer neither the minimum Euclidean path (as usually selected from local pedestrians, Turner, Citation2000), nor the minimum angular path (usually associated to tourist, Turner, Citation2000), but the opposite: the “maximum” angular path evenFootnote23 if a bit Euclideanly longer.
Physical environment is different than psychological environment; understanding people’s perceptions and preferences of street layouts is beneficial to compute better algorithms, equations, rules modeling pedestrian behaviors and to urban design and planning for building a more pleasant environment from the humans’ cognitive point of view. The issues faced in this paper are not just related to Space Syntax methods but to any models assessing distances between streets in a topological–geometrical–psychological way rather than purely metrically.
Notes
1 Which is fine; the discussion opened by this paper is whether is always fine to calculate depth in ways that change of directions is valuated as a cost, therefore adding more depth.
2 Distant “4”: three steps, as three changes of direction out of the line of sight, namely four axial lines; or distant “3.5” if in terms of angular segment analysis considering that the pedestrian turns three times of approximately 90°, and once of approximately 45°, where the angular cost is calculated between 0, for zero angle of change direction, and 2, for 180°; therefore, 45° is counted as 0.5 and 90° is counted as 1.
3 Stated Preference approach is linked with traditional microeconomics consumer behavior theories, marketing and preference theory (Häfner, Zasada, van Zante, Ungaro, Koetse & Piorr Citation2018; Louviere, Hensher & Swait, Citation2000). Although it is well known that the Stated Preference method can be systematically biased, it can still provide reliable indications about underlying preferences (Wardman, Citation1988). For example, in a study, “in 80% of the respondents the stated and revealed preferences corresponded” (Lambooij et al., Citation2015). Stated Preference approach for pedestrian preferences appears in several studies, such as Kelly, Tight, Hodgson, and Page (Citation2011) and Kaparias, Bell, Miri, Chan and Mount (Citation2012). An overview about revealed and normative preferences can be found in Beshears, Choi, Laibson, and Madrian (Citation2008).
4 Distant “2 or 3”, as two or three steps, according to how you draw the axial lines; or distant “1.5” under angular segment analysis (you turn 45° for three times).
5 In angular segment analysis, what matters is the total change of angles direction along a path, therefore if along the path you always turn on the same direction (for example, left), turning five times of 18° is equivalent to turning once of 90°. On the contrary if, along a path, you alternately turn five times, once on the left, once on the right, of 18° each, the total angle is still 90° but if you approximate the latter path with one axial/segment line this 90° will become 0°. While in the first example if you approximate the path with two axial/segment lines, the final result in terms of total angle is the same (90°).
6 As currently being the conceptual and computational foundation of Space Syntax.
7 With physically continuous, as before, we mean without intersections, junctions along the path with other streets.
8 The italics are ours.
10 The italics are ours.
11 The italics are ours.
13 The italics are ours.
15 To be more accurate, in case of a single continuous street (as from the questionnaire of this paper), the potential loss of orientation is related to the cardinal points and our own position within the area, rather than the loss of direction to follow to reach a destination. In fact, the latter is guaranteed from the continuity of the street anyway, regardless how many times one needs to turn one’s own body along it. See also note 17.
16 It is inversely proportional to the number of segments rather than angles, because (at least for what we can know for this questionnaire) it wouldn’t matter much the actual magnitude of the angles of turns, but the fact that there are turns.
17 Route II in drives you from A to B, or vice versa, without you getting worried about orientation as it is a single (curvy) street. The points where Routes I and II meet each other are actual decisional points (Route I or Route II?) but the reader will understand the difference between this kind of route decision and the one involved in the NcD.
18 In this case, the potential loss of orientation is both related to note 14 and to the loss of direction to follow to reach a destination.
19 As in min 22:50 in https://www.youtube.com/watch?v=ncff2SfcQAs, or Figure 0–2 in Turner (Citation2000).
20 “Mostly” as there are more and more parametrizations and weighting methods to include metric distance and other aspects in the traditional Space Syntax analysis, even if the main core is still topological.
21
Space Syntax approaches privilege the topological properties of a space over its geography, because people tend to behave (i.e. move) in ways that are based on topology (Ostwald, Citation2011). As a result, a Space Syntax approach uses graph theory because it provides the perfect basis for analysing topological relationships. (Behbahani, Gu & Ostwald, Citation2014)
22 “May” because, to be precise, the questionnaire of this paper didn’t ask to select a path among many in the same street layout, but simply between a straight path and a curvy one.
23 Only the 30% of pedestrian perceived as shorter the straight path in the questionnaire of this paper, and, apart from this, the preference toward curvy paths may offset a shorter but straight path (“how much shorter” may be subject of further investigations).
References
- Agrawal, A. W., Schlossberg, M., & Irvin, K. (2008). How far, by which route and why? A spatial analysis of pedestrian preference. Journal of Urban Design, 13, 81–98. doi:10.1080/13574800701804074
- Arnberger, A., & Eder, R. (2011). Exploring the heterogeneity of rural landscape preferences: An image-based latent class approach. Landscape Research, 36(1), 19–40. doi:10.1080/01426397.2010.536204
- Ball, K., Bauman, A., Leslie, E., & Owen, N. (2001). Perceived environmental aesthetics and convenience and company are associated with walking for exercise among Australian adults. Preventive Medicine, 33(5), 434–440. doi:10.1006/pmed.2001.0912
- Batty, M. (2004). Distance in Space Syntax. CASA Working Papers 80. London, UK: Centre for Advanced Spatial Analysis (UCL).
- Batty, M., & Rana, S. (2002, September 02). Reformulating Space Syntax: The automatic definition and generation of axial lines and axial maps. UCL Working Paper Series, Paper 58. doi:10.1044/1059-0889(2002/er01)
- Behbahani, P. A., Gu, N., & Ostwald, M. J. (2014). Comparing the properties of different Space Syntax techniques for analysing interiors. In F. Madeo & M. A. Schnabel (Eds.), Across: Architectural Research through to Practice: 48th International Conference of the Architectural Science Association 2014 (pp. 683–694). The Architectural Science Association & Genova University Press.
- Bell, P. A., Greene, T. C., Fisher, J. D., & Baum, A. (2001). Environmental psychology. New York: Taylor & Francis.
- Bera, R., & Claramunt, C. J. (2003). Topology-based proximities in spatial systems. Journal of Geographical Systems, 5, 353. doi:10.1007/s10109-003-0115-y
- Berlyne, D. E. (1974). Studies in the new experimental aesthetics: Steps toward an objective psychology of aesthetic appreciation. New York: Halsted Press.
- Beshears, J., Choi, J. J., Laibson, D., & Madrian, B. C. (2008, August). How are preferences revealed? Journal of Public Economics, 92(8–9), 1787–1794. doi:10.1016/j.jpubeco.2008.04.010
- Cullen, G. (1971). The concise townscape. Burlington. New York, NY: Architectural Press.
- D’Acci, L. (2015). Mathematize urbes by humanizing them. Cities as isobenefit landscapes: Psycho-economical distances and personal isobenefit lines. Landscape and Urban Planning, 139, 63–81. doi:10.1016/j.landurbplan.2015.02.016
- D’Acci, L. (2019). Aesthetical cognitive perceptions of urban street form. Pedestrian preferences toward straight or curvy route shapes. Journal of Urban Design. Retrieved from www.tandfonline.com/doi/full/10.1080/13574809.2018.1554994
- Dachary-Bernard, J., & Rambonilaza, T. (2012). Choice experiment, multiple programmes contingent valuation and landscape preferences: How can we support the land use decision making process? Land Use Policy, 29(4), 846–854. doi:10.1016/j.landusepol.2012.01.002
- Dalton, R. C. (2003). The secret is to follow your nose. Route path selection and angularity. Environment and Behavior, 35(1), 107–131. doi:10.1177/0013916502238867
- Dramstad, W. E., Tveit, M. S., Fjellstad, W. J., & Fry, G. L. A. (2006). Relationships between visual landscape preferences and map-based indicators of landscape structure. Landscape and Urban Planning, 78(4), 465–474. doi:10.1016/j.landurbplan.2005.12.006
- Ewing, R., & Handy, S. (2009). Measuring the unmeasurable: Urban design qualities related to walkability. Journal of Urban Design, 14(1), 65–84. doi:10.1080/13574800802451155
- Feng, C., & Zhang, W. (2017, July 3–7). Grasshopper reach analysis toolkit: Interactive parametric syntactic analysis. Proceedings of the 11th Space Syntax Symposium, Lisbon
- Ferrer López, S., Ruiz Sánchez, T., & Mars, L. (2015). A qualitative study on the role of the built environment for short walking trips. Transportation Research Part F: Traffic Psychology and Behaviour, 33, 141–160. doi:10.1016/j.trf.2015.07.014
- Frank, L. D., Schmid, T. L., Sallis, J. F., Chapman, J., & Saelens, B. E. (2005). Linking objectively measured physical activity with objectively measured urban form: Findings from SMARTRAQ. American Journal of Preventive Medicine, 28(2 Suppl. 2), 117–125. doi:10.1016/j.amepre.2004.11.001
- Frith, M. (2017, July 3–7). Using qualitative distance metrics in space syntax and configurational analyses. Proceedings of the 11th Space Syntax Symposium, Lisbon.
- Giles-Corti, B., & Donovan, R. J. (2002). Socioeconomic status differences in recreational physical activity levels and real and perceived access to a supportive physical environment. Preventive Medicine, 35(6), 601–611. doi:10.1006/pmed.2002.1115
- Grammatikopoulou, I., Pouta, E., Salmiovirta, M., & Soini, K. (2012). Heterogeneous preferences for agricultural landscape improvements in southern Finland. Landscape and Urban Planning, 107(2), 181–191. doi:10.1016/j.landurbplan.2012.06.001
- Häfner, K., Zasada, I., van Zanten, B. T., Ungaro, F., Koetse, M., & Piorr, A. (2018). Assessing landscape preferences: A visual choice experiment in the agricultural region of Märkische Schweiz, Germany. Landscape Research, 43(6), 846–861. doi:10.1080/01426397.2017.1386289
- Hagerhall, C. M., Purcell, T., & Taylor, R. (2004). Fractal dimension of landscape silhouette outlines as a predictor of landscape preference. Journal of Environmental Psychology, 24.
- Herzog, T., & Miller, E. (1998). The role of mystery in perceived danger and environmental preference. Environmental and Behavior, 30, 429–449. doi:10.1177/001391659803000401
- Hillier, B. (1998). From research to designer-engineering the space in Trafalgar Square. Urban Design Quarterly, 68, 35–37.
- Hillier, B. (2007). Space is the machine: A configurational theory of architecture. Cambridge: Cambridge University Press.
- Hillier, B. (2009). Spatial sustainability in cities. Proceedings of the 7th International Space Syntax Symposium.
- Hillier, B., & Hanson, J. (1984). The social logic of space. Cambridge: Cambridge University Press.
- Hillier, B., & Iida, S. (2005). Network effects and psychological effects: A theory of urban movement. Proceedings of the 5th International Space Syntax Symposium.
- Hodgson, F. C., Page, M., & Tight, M. R. (2004). A review of factors which influence pedestrian use of the streets: Task 1 report for an EPSRC funded project on measuring pedestrian accessibility. Working Paper. Leeds, UK: Institute of Transport Studies, University of Leeds.
- Inoue, S., Ohya, Y., Odagiri, Y., Takamiya, T., Ishii, K., Kitabayashi, M., … Shimomitsu, T. (2010). Association between perceived neighborhood environment and walking among adults in 4 cities in Japan. Journal of Epidemiology, 20(4), 277–286. doi:10.2188/jea.JE20090120
- Jansen-Osmann, P., & Wiedenbauer, G. (2004). The representation of landmarks and routes in children and adults: A study in a virtual environment. Journal of Environmental Psychology, 24(2004), 347–357. doi:10.1016/j.jenvp.2004.08.003
- Kaparias, I., Bell, M. G. H., Miri, A., Chan, C., & Mount, B. (2012). Analysing the perceptions of pedestrians and drivers to shared space. Transportation Research Part F: Traffic Psychology and Behaviour, 15(3), 297–310. doi:10.1016/j.trf.2012.02.001
- Kaplan, S. (1987). Aesthetics, affect, and cognition: Environmental preference from an evolutionary perspective. Environment and Behavior, 19(1), 3–32. doi:10.1177/0013916587191001
- Kaplan, S. (1988). Where cognition and affect meet: A theoretical analysis of preference. In J. L. Nasar (Ed.), Environmental aesthetics: Theory, research and applications (pp. 56–63). Cambridge, UK: Cambridge University Press.
- Kelly, C. E., Tight, M. R., Hodgson, F. C., & Page, M. W. (2011). Journal of transport geography. A Comparison of Three Methods for Assessing the Walkability of the Pedestrian Environment, 19(6), 1500–1508.
- Kent, R. (1989). The role of mystery in preferences for shopping malls. Landscape Journal: Design, Planning and Management, 8(1), 28. doi:10.3368/lj.8.1.28
- King, A. C., Castro, C., Wilcox, S., Eyler, A. A., Sallis, J. F., & Brownson, R. C. (2000). Personal and environmental factors associated with physical inactivity among different racial–ethnic groups of U.S. middle-aged and older-aged women. Health Psychology, 19(4), 354–364. doi:10.1037/0278-6133.19.4.354
- Lambooij, M. S., Harmsen, I. A., Veldwijk, J., de Melker, H., Mollema, L., van Weert, Y. W. M., & de Wit, G. A. (2015). Consistency between stated and revealed preferences: A discrete choice experiment and a behavioural experiment on vaccination behaviour compared. BMC Medical Research Methodology, 2015(15), 19. doi:10.1186/s12874-015-0010-5
- Lopez, R. P., & Hynes, H. P. (2006). Obesity, physical activity, and the urban environment: Public health research needs. Environmental Health: A Global Access Science Source, 5, 25. doi:10.1186/1476-069X-5-25
- Louviere, J. J., Hensher, D. A., & Swait, J. D. (2000). Stated choice methods: Analysis and applications. Cambridge: Cambridge University Press.
- Matsumoto, N., Koyanagi, E., & Seta, S. (1997, November 4–6). Physical and mental factors of anticipation in the streetscape. Conference Proceedings of the International Conference on Environment-Behavior Studies for the 21st Century, Tokyo, pp. 283–286.
- McCormack, G., Giles-Corti, B., Lange, A., Smith, T., Martin, K., & Pikora, T. J. (2004). An update of recent evidence of the relationship between objective and self-report measures of the physical environment and physical activity behaviours. Journal of Science and Medicine in Sport, 7(1), 81–92. doi:10.1016/S1440-2440(04)80282-2
- Miller, G. A. (1956). The magical number seven, plus or minus two: Some limits on our capacity for processing information. Psychological Review, 63, 81–93. doi:10.1037/h0043158
- Montello, D. R. (1991). Spatial orientation and the angularity of urban routes: A file study. Environment & Behaviour, 23, 47–69. doi:10.1177/0013916591231003
- Oliveira, V. (2016). Urban morphology. Springer.
- Orland, B., Daniel, T. C., & Haider, W. (1994). Calibrated images: Landscape visualizations to meet rigorous experimental design specification. In Proceedings of Decision Support 2001, Resource Technology, p. 94.
- Ostwald, M., & Dawes, M. (2011). Axial line analysis revisited: Reconsidering its value for architecture. The International Journal of the Constructed Environment, 1(3), 219–242. doi:10.18848/2154-8587/CGP
- Owen, N., Cerin, E., Leslie, E., duToit, L., Coffee, N., Frank, L. D., … Sallis, J. F. (2007). Neighborhood walkability and the walking behavior of Australian adults. American Journal of Preventive Medicine, 33(5), 387–395. doi:10.1016/j.amepre.2007.07.025
- Owen, N., Humpel, N., Leslie, E., Bauman, A., & Sallis, J. F. (2004). Understanding environmental influences on walking; Review and research agenda. American Journal of Preventive Medicine, 27(1), 67–76. doi:10.1016/j.amepre.2004.03.006
- Papadimitriou, E., Yannis, G., & Golias, J. (2009). A critical assessment of pedestrian behaviour models. Transportation Research Part F: Traffic Psychology and Behaviour, 12(3), 242–255. doi:10.1016/j.trf.2008.12.004
- Perdomo, M., Rezaei, A., Patterson, Z., Saunier, N., & Miranda-Moreno, L. F. (2014). Pedestrian preferences with respect to roundabouts – A video-based stated preference survey. Accident Analysis and Prevention, 70(2014), 84–91. doi:10.1016/j.aap.2014.03.010
- Porta, S., Latora, V., & Crucitti, P. (2012). The network analysis of urban streets: A primal approach. In N. Thrift, T. Barnes, & J. Peck (Eds.), Environment and planning (Vol. A Cities and Regions, pp. 247–276). London: SAGE.
- Rashid, M. (2017). The geometry of urban layouts. Springer.
- Sadalla, E. K., & Montello, D. R. (1989). Remembering changes in direction. Environment & Behavior, 21, 346–363. doi:10.1177/0013916589213006
- Shigematsu, R., Sallis, J. F., Conway, T. L., Saelens, B. E., Frank, L. D., Cain, K. L., … King, A. C. (2009). Age differences in the relation of perceived neighborhood environment to walking. Medicine and Science in Sports and Exercise, 41(2), 314–321. doi:10.1249/MSS.0b013e318185496c
- Stavroulaki, G., Marcus, L., Pont, M. B., & Nilsson, L. C. F. (2017). Representations of street networks in Space Syntax: Towards flexible maps and multiple graphs. Proceedings of the 11th Space Syntax Symposium. Retrieved from http://www.11ssslisbon.pt/docs/proceedings/papers/174.pdf
- Taylor, R., Spehar, B., Hagerhall, C., & Van, D. P. (2011). Perceptual and physiological responses to Jackson Pollock’s fractals. Frontier in Human Neuroscience, 5.
- Tolman, E. C. (1938). The determiners of behaviour at a choice point. Psychological Review, 45, 1–41. doi:10.1037/h0062733
- Turner, A. (2000). Angular analysis: A method for the quantification of space. CASA Working Paper Series. London: Centre for Advanced Spatial Analysis, UCL.
- Turner, A. (2007). From axial to road-centre lines: A new representation for space syntax and a new model of route choice for transport network analysis. Environment and Planning B: Planning and Design, 34, 539–555. doi:10.1068/b32067
- van Berkel, D. B., & Verburg, P. H. (2014). Spatial quantification and valuation of cultural ecosystem services in an agricultural landscape. Ecological Indicators, 37(PART A), 163–174. doi:10.1016/j.ecolind.2012.06.025
- Van Dyck, D., Cerin, E., Conway, T. L., De Bourdeaudhuij, I., Owen, N., Kerr, J., … Sallis, J. F. (2013). Perceived neighborhood environmental attributes associated with adults’ leisure time physical activity: Findings from Belgium, Australia and the USA. Health & Place, 19, 59–68. doi:10.1016/j.healthplace.2012.09.017
- Wang, Y., Chau, C. K., Ngb, W. Y., & Leung, T. M. (2016, February). A review on the effects of physical built environment attributes on enhancing walking and cycling activity levels within residential neighborhoods. Cities, 50, 1–15. doi:10.1016/j.cities.2015.08.004
- Wardman, M. (1988). A comparison of revealed preference and stated preference models of travel behaviour. Journal of Transport Economics and Policy, 22(1), 71–91.
- Xi, H., & Son, Y.-J. (2012). Two-level modeling framework for pedestrian route choice and walking behaviors. Simulation Modelling Practice and Theory, 22, 28–46. doi:10.1016/j.simpat.2011.11.002
- Zacharias, J. (2001). Pedestrian behavior pedestrian behavior and perception in urban walking environments. Journal of Planning Literature, 16, 3–18. doi:10.1177/08854120122093249