
Abstract
This paper argues that state, system, and process descriptions of situation awareness (SA) are interdependent. Based on SA research from the last 30 years, the paper proposes a holistic SA framework. SA states emerge from processes of exploring situations through SA systems. Reflecting research on safety II (resilience), in describing SA states, the framework distinguishes frames (what situations are considered) from implications (regarding the situations) of objects on and of an event horizon. The paper describes and discusses SA system and process dependencies on SA states. It also describes SA system components as mediators and catalysts for SA, SA system properties (e.g. buffering SA), and dynamic SA system formation. Based on an analysis of four enactments of Air Traffic Control situations, the paper argues that what is domain-characteristic may not characterise all situations in a domain. The SA field could thus benefit from incrementally refining a nuanced cross-domain framework.
Introduction
Over the last 30 years, the notion of situation awareness (SA) has evolved, but also fractured into a diversity of models, hindering progress in understanding SA (for an overview, see e.g. Salmon et al. Citation2008; Lau, Jamieson, and Skraaning Citation2013). This paper outlines various strands of SA research, bringing them together into a holistic framework. Furthermore, the framework includes concepts from resilience engineering, reflecting an increased focus in research and practice on managing the unexpected/unplanned-for situations (safety II). The application of the framework is exemplified through situations from the Air Traffic Control domain, based on analysis of four enactments of three scenarios in a simulator environment.
The concept of SA has its roots in the everyday common-sense observation that a loss of ‘the picture’, a loss of orientation toward ongoing events, sometimes causes accidents or other undesirable events. Central to the notion of SA is that humans need to be aware of certain aspects of the world – at specific moments in time, to make critical decisions.
The word awareness may cause concern – since it is not clear how, exactly, to define awareness (see e.g. Dekker, Hummerdal, and Smith Citation2009, for a review). However, SA pinpoints something critical – a focus on fleeting transient moments of being aware of specific aspects of the present, the future, or the past. SA becomes important when it is critical that this awareness contains the right aspects, at the right time, to cope with real-time systems. SA is thus anchored in the present, when decisions and actions can be made, but can be oriented toward the past or the future. This is what made SA relevant when the concept emerged (see e.g. Endsley Citation1995), and what keeps it relevant.
The transient nature of SA emphasises processes of awareness, of how the moment-to-moment SA is achieved and refreshed. The notion of situation, reflecting the contents of SA states, focuses on SA as a locus of decision-making, in the midst of ongoing dynamic, uncertain processes. Furthermore, and perhaps initially less obvious, SA must belong to some subject – and that is the focus of research on SA systems; that is, SA as dependent on the local environment, on local teamwork, and on larger systems of people and artefacts. Broadly, theories of situation awareness thus focus on awareness as a process, on the notion of situation, and on the subject of awareness. In the following section, the research strands are outlined, and merged into a holistic framework.
Situation awareness states
Research on SA states concerns how to describe the contents of SA and what contents to describe, in specific domains and in general. Early SA research identified what SA is about, in different domains, emphasising a wide variety in objects of interest. For instance, a focus on commercial flight decks brought forward components such as spatial awareness, the environment, aircraft performance, aircraft systems, and the crew (Regal, Rogers, and Boucek Citation1988). Shifting the focus to air-to-air fighter pilots, SA focus shifted accordingly, to include components such as airborne missiles (Endsley Citation1993). In contrast, in crisis response, SA aspects such as goals (long term/short term), functions, resources, reinforcements (personnel), and capacity have been identified as important to share (Lundberg and Asplund Citation2011).
Mental models
Objects of interest are not only relevant with regard to awareness of their state. Clearly, knowing how the objects work, on the inside, or in interaction with other objects, can be central to achieve SA. That is, for instance, how aircraft systems work in the aviation domain. This knowledge of how things work is often described using the term mental models. The two concepts of mental models, on the one hand, and SA, on the other hand, are related and have not always been distinguished (see e.g. Endsley Citation1990). When distinguished, mental models have been seen as necessary to go from lower levels of SA (e.g. awareness of elements of the environment) to higher levels of understanding (Endsley Citation1995). Mental models may describe relatively static aspects such as basic facts (declarative), relations between tasks, actions and goals (procedural) and how these work in practice (strategic) (Salas, Stout, and Janis Citation1994), including memories of recent occurrences (Adams and Pew Citation1990). As part of SA, these aspects may focus on awareness of aspects central to devise a course of action, e.g. of procedure characteristics (e.g. difficulty), and of alternative procedures (Regal, Rogers, and Boucek Citation1988).
Frames versus interpretations within frames
To describe build-up of understanding of situations through active exploration of environments, the notions schema and frame are often used. Schema denotes, on the one hand, expectancies of what objects in the environment to explore. On the other hand, they also denote implications of the explored environmental objects interpreted through the schema.
These two facets, the schema as preparedness for exploration and interpretation, and as particular instances of active exploration, have been distinguished in SA theory as genotype schema and phenotype schema (Stanton et al. Citation2009a). The genotype refers to the general schema (of what situation has occurred and how to make sense of it), whereas the phenotype refers to specific manifestations (of what is known about it).
Furthermore, schema relates to the overarching concept of frame. For instance, a schema may be a frame: ‘… frame (a story or script or schema) that accounts for the data and guides the search for additional data’ (Klein et al. Citation2005, 20). It should, however, be noted that some authors (e. g. Minsky Citation1975) use the notion of frame similar to how schema is used here. Moreover, what constitutes the environment is dependent on the perspective taken. Focusing on individual SA, the environment may be seen as everything outside of the individual. Taking a systems view (e.g. a system consisting of team of humans and their technologies), the environment is instead what is outside of that system.
The way that situations are recognised and constructed have been further elaborated in theories on sensemaking. In a narrow sense, it can be defined as: ‘sensemaking is the process of fitting data into a frame, and fitting a frame around the data’ (Klein, Wiggins, and Dominguez Citation2010, 308; see ). Three activities are central, namely re-framing, elaborating frames, and questioning frames:
Re-framing is about comparing different ideas (frames) about what goes on, or about creating new ideas (frames).
Elaborating frames is about ‘filling them in’, gathering more detail and following up information that becomes relevant in the current frame. It can also be about rejecting data that do not fit in.
Questioning frames is about raising doubt about the current understanding (e.g. through anomalies, inconsistencies, and issues with data quality).
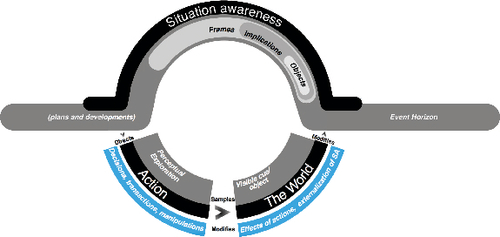
Figure 1. ‘The picture’. Implications, e.g. ‘the picture’ of objects within frames.
The centrality of framing objects and elaborating frames is reflected in an early overview of SA definitions. It broadly emphasises sampling and understanding environmental objects, e.g. ‘integration of information into an overall mental picture’ (Dominguez Citation1994, 19). It is furthermore central to a definition of SA that was proposed in the late 1980s and early 1990s, in a groundbreaking series of articles on how to define and measure SA. The first two levels (of three) divided SA into (1) elements of the environment (what's there), within three zones of being near, a bit further out, and even further away, and (2) as comprehension of what the elements means (versus what a fighter pilot wants to achieve (Endsley Citation1995)). That model, however, does not distinguish the variety of frames considered from implications of objects within frames. In contrast, recent research in a sports context showed that trainers and athletes frame situational elements differently (Macquet and Stanton Citation2014). This emphasises the importance of distinguishing overarching frames from particular implications of objects within frames.
Two problems with regard to questioning frames can be highlighted. First, there is a problem of requisite imagination, to be able to consider a situation, before it has occurred at all (Westrum Citation2006). Second, and more connected to sensemaking of immediate events, is the problem of requisite interpretation, to be able to take in that an ongoing situation is actually occurring (despite it being, e.g., inconvenient or unusual) (Lundberg and Johansson Citation2006).
The variation in frames and the capacity of a system of work with them represent the kinds and amounts of threats that it can make sense of. This corresponds to the term buffering capacity (see e.g. Lundberg, Törnqvist, and Nadjm-Tehrani Citation2012; Mendonca and Wallace Citation2006; Woods Citation2006) from the resilience engineering literature. Woods originally defined buffering capacity as ‘the size or kinds of disruptions the system can absorb or adapt to without a fundamental breakdown in performance or in the system's structure’ (Citation2006, 23). The importance of buffering capacity can be illustrated through consideration of SA versus uncertainty. An early SA model illustrated that, with low uncertainty, people can also perform well with low SA. However, as uncertainty increases, so does the requirement to generate and maintain SA (Dörfel and Distelmailer Citation1997). High uncertainty with regard to what situation has occurred requires several alternatives (i.e. frames) to be considered (Wohl Citation1981).
A distinction may be made between capacity to make sense of a wide variety of (anticipated) situations and capacity to make sense of unexpected situations. The range of situations that a system is prepared to make sense of can be understood through the term sensemaking variety (Lundberg, Törnqvist, and Nadjm-Tehrani Citation2012). It refers to the variety of frames that a system may draw on to make sense of situations. It extends the notion of requisite variety (a term borrowed from Ashby Citation1956), the variety in control actions a system must have to match the variety of disturbances it may encounter. A wide variety of known disturbances thus require high system capacity to draw on wide sensemaking variety. In contrast, high uncertainty with regard to the variety of situations a system may encounter is suggestive of systems requiring high capacity to generate new frames. Framing is thus central to resilience, i.e. the sustained ability to cope with the unexpected or the unplanned-for by adapting and adjusting the system to new events and circumstances. The range of alternative accounts of situations and potential developments (e.g. contingencies) that are part of a systems SA constitutes its b uffering SA.
An event horizon of plans and developments
To understand how SA relates to decision-making and to considerations of situational developments, it is useful to turn to naturalistic decision-making (NDM) and recognition-primed decision-making (RPD). It is a well-known model of how humans recognise situations to make decisions. The main idea behind it is that, in some situations, people evaluate situations based on recognition of similarities to previous situations, and that people evaluate ideas serially, using the first idea that suffices. In RPD, typicality of situations is matched based on four main facets: cues, expectancies, goals and typical actions (Klein and Calderwood Citation1991).
Cues are aspects of the environment that can be used to recognise situations. It is thus a subset of the objects in the environment of which a person may become aware, or is already aware.
Expectancies refer to a temporal dimension, to be able to ‘generate explanations for events that have occurred, tying them together in a story’ (Klein et al. Citation2005, 21). This includes what cues to monitor to confirm or disconfirm that the situation has been understood correctly, i.e. of what is on the horizon. It should be noted that expectancies/schema may mislead, when circumstances deviate from expectations (see e.g. Lundberg, Törnqvist, and Nadjm-Tehrani Citation2014).
Expectancies relate to prognosis and diagnosis of problems. Past-oriented SA primarily concerns awareness of precursors of problems, of importance for diagnosis of problems. Future-oriented SA regards prevention through prognosis, dependent on awareness of precursors to potential problems (Sarter and Woods Citation1991). SA may facilitate control, to be able to determine system output despite disturbances. Prognosis allows feed-forward control. For instance, in a crisis response exercise (Lundberg, Törnqvist, and Nadjm-Tehrani Citation2012), participants were able to predict effects of an electricity outage on the wastewater system. This allowed feed-forward control, through moving generators to key locations, before effects of the outage on the wastewater system became manifest.
Regarding prospective awareness, it has been observed that the relevant timescale can differ depending on the task. For instance, an observation in the emergency response domains showed that the timescale for the back-end staff differed from the timescale of the front-line staff (Artman and Garbis Citation1998).
Although situations can be partly understood based on cues and expectancies, to gain prospective awareness of what might happen next, the two facets, goals (what to achieve) and typical actions (what to do), are also important. These facets have also been included in previous SA models, e.g. as goals, plans, scripts, and actions (Endsley Citation1995). The plan dimension has been further emphasised in other SA definitions, e.g. as goals, sub goals, alternative goals, as well as temporal relations between goals (Regal, Rogers, and Boucek Citation1988).
This temporal dimension relates expected developments to plans. It is for instance reflected in the third level in Endsley’s hierarchy, as projection into the near future (what will or might happen next with regard to own plans and the plans of enemy pilots) (Endsley Citation1988). In military applications, plans are emphasised even further. In the critique–explore–compare–adapt (CECA) loop model, there is a notion of the commanders ‘vision’ or ‘conceptual model’. It contains not only a plan, but also indicators to monitor the plan as it unfolds. Thus, rather than merely projecting situations into the future, in the CECA model, the ‘vision’ is compared to the situation (Bryant Citation2006). An emphasis on plans (goals, plans, and tasks) and situational developments (states, their interactions, and dynamics over time) is also reflected in recent SA work. It is central to the formation of an SA prediction horizon, in an application of the extended control model (ECOM) to the maritime domain (van Westrenen and Praetorius Citation2014). Their notion of a prediction horizon relates to the basic notion of an event horizon, in the model that ECOM extends, the contextual control model (Hollnagel Citation1993).
Summary of SA states
In sum, SA states can be broadly described through four aspects: frames, implications, and objects, on an event horizon of plans and developments ().
Figure 2. SA states.
As described above, the notion of objects, elements, or cues recur in many theories on SA. Furthermore, based on the powerful notions of schema and the overarching concept of framing, this framework distinguishes frames (indicative of what genotype schema may be relevant) from implications, e.g. the active (phenotype) schema being updated and used to describe implications of schema elements. The variety of frames that can be applied (potentially) and that are applied (in a specific situation) can then be distinguished. This is of importance when considering SA versus potential developments (e.g. contingencies), or when considering situations where situations have in hindsight been misinterpreted.
Thus, as illustrates, SA is, on the one hand, about how frames; implications and objects relate to the event horizon. On the other hand, as developments unfold, SA may also change, following and adjusting the event horizon. It must be emphasised that SA is not a permanent achievement, but may be transient – what objects a subject were aware of a moment ago, they may be unaware of a moment later, as the process of SA unfolds. In the next section, theories related to the SA process will be reviewed.
Situation awareness processes
Research on SA process concerns how to describe processes of achieving and maintaining SA, and relations to processes of using SA (e.g. decision-making, coordination). To achieve SA, any system needs to be able to recognise known situations, and to be able to construct new understandings of what has not been encountered before. This is often viewed as a cyclical process, relying on the perceptual cycle (Neisser Citation1976) as the foundation (for an overview, see e.g. Stanton et al. Citation2009a).
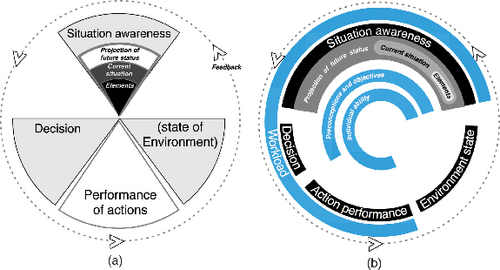
The perceptual cycle (Neisser Citation1976) ((a)) contains, at one point, an active schema (a phenotype schema as the active frame). A schema is at the same time a model of the actual situation, and a model of expectancies, of what relevant information that could be picked up. This schema directs perceptual exploration, sampling the environment, modifying the schema, which closes the loop. At that point in the loop, Neisser (Citation1976) further used the notion cognitive maps/orienting schema to represent knowledge of where to find information that is currently out of view. It guides movement to turn potentially available information into available information. The guidance may occur more or less by habit, without explicit decisions of ‘where to go next’ at each step. This model has been used to model systems SA, as a perceptual cycle of a whole system (Stanton et al. Citation2009a).
Figure 3. (a) The perceptual cycle, adapted from Neisser Citation(1976). (b) Core SA action-feedback model.
Schema represents focused (serial) attention; scan patterns evoked in response to situations. Cues, however, may also capture attention (a parallel unconscious attention process) (Gugerty and Falzetta Citation2005), evoking schema. Correspondingly, research (see e.g. Horrey, Wickens, and Consalus Citation2006) has shown that what objects are sampled is reflected by the SEEV model; by s alience (of the object/cue), e ffort (in sampling it), e xpectancy (of change), and v alue (of sampling the object). As highlighted by Moore and Gugerty Citation(2010), schema may be executed in parallel. For instance, a focused scan on a particular event may require execution at the same time as a broad scan to monitor a situation at large. What schema to prioritise can then be a trade-off.
What follows from the perceptual cycle model is that schema are constructed and reconstructed when making sense of the world. It thus also follows that the ability to maintain SA may be a result of experiencing and coping with environmental challenges. As a side effect, schema to make sense of the situations develops. This resultant repertoire of schema (frames), the build-up of SA sensemaking variety, has previously been described as an ‘invariant’ of the perceptual cycle (Smith and Hancock Citation1995). The invariant is at the centre of their model, both as a result of and as a resource for the process.
If drawn in a circle ((a), left), instead of a model of blocks and arrows, two older models can also be analysed as action-feedback models of the same kind as the perceptual cycle. There are similarities to the core (highlighted in grey in the original drawing) of the model of SA in dynamic decision-making (Endsley Citation1995), and the core of the aircrew decision-making model ((b), right) (Endsley Citation1988) that it extends. Around this core, Endsley also outlines relations to and between individual cognitive factors (Citation1988, Citation1995), and to system factors (Citation1995). Endsley emphasises performance of actions (drawn in a block in the original illustrations) over the state of the environment (drawn on an arrow). Nevertheless, overarching similarities to the action-feedback model are clear.
Figure 4. (a) Left, core of the model of situation awareness in dynamic decision-making (Endsley Citation1995), and the core of the aircrew decision-making model (Endsley Citation1988). (b) Right, the aircrew decision-making model (Endsley Citation1988). The models have been redrawn to highlight similarities with the perceptual cycle.
Similarities between process-centric SA models and process-centric control models suggest how analyses of SA can be integrated into analyses of control. As mentioned above, the ECOM has been adapted to model SA in the maritime domain (van Westrenen and Praetorius Citation2014). ECOM (Hollnagel and Woods Citation2005) in turn builds on the perceptual cycle (Neisser Citation1976), just like the process-centric SA models described above. In ECOM (), for instance, understanding of the situation as a whole is a part of setting overarching targets (targeting), and recognition of local situations may trigger recall of previous plans (regulating). Apart from modelling SA through ECOM, the perceptual cycle is also the foundation of other models of action (see e.g. Lundberg, Törnqvist, and Nadjm-Tehrani Citation2012). Some models of SA and some models of control thus share a basic underlying action-feedback cycle model. This is of major importance, since the notion of SA is relevant primarily in facilitating analyses of coping with high-stakes environments.
Figure 5. Extended control model (ECOM) (Hollnagel and Woods Citation2005).
Summary – SA processes
In sum, in contrast to the focus on what awareness consists of in analyses of SA states, the process view of SA focuses on how SA changes over time, and in relation to other processes such as decision-making.
As illustrates, SA is a process that generates an event horizon. The core action-feedback model of the perceptual cycle is drawn in black, mirroring the perceptual cycle ((b)). It consists of SA (frames, implications, objects, and event horizon), not only directing action, modifying the world, but also sampling cues/objects, modifying SA. Furthermore, within larger SA systems, physical manipulations may modify externalisations of SA, and SA transactions may occur.
Figure 6. SA processes.
Situation awareness systems
Research on SA systems concerns the location, distribution, and properties of SA in systems, and the SA-related functions of objects as parts of SA systems. A focus on memory performance was reflected in early SA models (Endsley Citation1988), situating SA in human memory, related to internal cognitive information process components. The environment was simply represented as a line to a box called ‘input’, and the connection from the ‘output’ box was a line called ‘feedback’.
Memory issues cannot be ignored, since at some point, information must reach awareness, and interact with human memory. Examples of memory problems are, for instance, misrecall, or forgetting of temporary information (Shorrock Citation2005). For an overview of SA issues related to memory, see e.g. Adams and Pew Citation(1990).
If SA turns inwards, for memory to gain access to previously attended information, problems regarding dynamic situations with a steady stream of information emerges (Rantanen Citation1994). Trained human memory capacity primarily depends on the ability to chunk information, having sufficiently efficient strategies for coding and decoding during time pressure. Humans can reliably remember only about 7 ± 2 chunks. However, the strategies that determine the amount of information in each chunk can result in vast differences in performance between trained and non-trained humans (Miller Citation1956). Research on SA appears to support this – peer and superior's assessment of fighter pilot SA correlates strongly with both flight hours and memory performance (together with spatial reasoning and divided attention) scores (Carretta, Perry, and Ree Citation1996). With inadequate chunking strategies, as a human reaches the end of a long phone number (or during a long scan of air traffic) – information picked up a few steps earlier may already be lost. Nevertheless, even with effective chunking strategies, relying solely on human memory for SA is difficult not only due to memory problems, but also due to situation dynamics. The situation may have changed, so that the information becomes outdated.
As an alternative to reliance solely on memory, SA can rely on performance of a wider system, from supporting physical surroundings, to teams and larger collaborative units. From the late 1980s, there are published attempts to solve the challenges of gaining SA through design, through environments supporting achievement and maintenance of SA. An early attempt, for instance, suggested a design using large touch-screen visualisations integrating data from various sources (King Citation1987). This is also reflected in later research that extended the scope of the SA system from individuals to encompass the environment, with an emphasis on how SA is mediated. Artman and Garbis Citation(1998) describe situations where team members are not being served the full picture in the mediating objects. To a great extent, they generate the required SA through their interaction with and around mediators of information, rather than simply reading what is required from the mediating object. The emphasis thus shifts from what is strictly mediated to the roles objects play in sensemaking processes. They use the term cognitive catalyser for objects used in this manner.
Distributed cognition also includes the system ergonomics perspective (Sorensen, Stanton, and Banks Citation2011; Stanton et al. Citation2009b). It models the process of using objects in creating SA. There are, however, limits to what each human can access, from a larger system. For instance, there are limitations to visual exploration speed, which implies that the meaningfulness of each fixation is highly important, in information-rich high-stakes domains (Lundberg et al. Citation2014).
It has furthermore been shown that different ways of configuring SA systems have different properties. For instance, the way that information is transferred through teams affect shared knowledge within the team about situations, their common ground (Artman Citation2000). A part of this common ground may consist of information required by the whole team to work – i.e. shared SA: ‘the degree to which team members have the same SA on shared SA requirements’ (Endsley and Jones Citation1997, 38). This stands in contrast to team SA: ‘the degree to which every team member possesses the SA required for his or her responsibilities’ (Endsley Citation1995, 39). It is thus not sufficient for team SA that the SA is available somewhere in the system or in the team – team SA focuses on the correct distribution of SA in the team. When considering distribution of SA, it has been observed (Stanton et al. Citation2009a) that SA of individuals does not have to be identical in the system – people may need to frame situations differently. SA then is required to be compatible rather than shared. Furthermore, the term meta-SA has been used to denote awareness of what SA other team members have (van Westrenen and Praetorius Citation2014). It should be noted that from a systems’ perspective, shared SA may also be seen as redundant SA, to be used if and when it would be required to address tasks of others.
Research has shown how the distribution of SA, defined as the location of information in nodes of a network, can be modelled (Stanton et al. Citation2009a). To achieve SA, different individuals (at different nodes) may be required to establish contact to share SA (Stanton et al. Citation2006). This sharing has been denoted transactive SA (Stanton et al. Citation2009a).
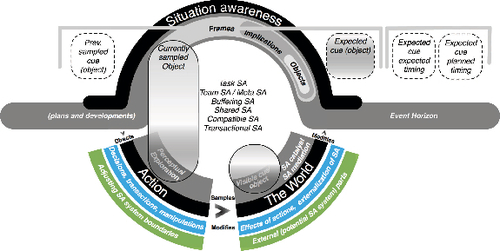
A holistic framework
As illustrates, SA states and processes are interdependent. It combines and , showing how SA is both situated on an event horizon, sampling information that is present, and is at the same time about the event horizon. As events unfold and new information becomes available, new objects can be sampled according to expectations. Furthermore, frames may be activated based on cues, and sense can be made of unfamiliar cues, forming new frames, potentially also affecting plans. SA is thus a continuous process resulting in SA states, i.e. awareness of:
Frames (i.e. What goes on?), emerging from framing the unknown, from questioning current frames, for instance by questioning what is on the horizon (Is that really what goes on?), and through being evoked by cues that has captured the attention of the system. The frame (e.g. genotype schema) thus represents comprehension and deliberation of what situation, at large, is going on. Note that a person may simultaneously harbour different, even conflicting, frames. The capacity to recognise situations (buffering capacity) draws on the variety of frames (sensemaking variety) of the system. The schema are, on the one hand, individual, but must, on the other hand, also be a system-wide property to manage situations managed by larger SA systems (e.g. within teams). Borrowing from RPD, frames also represent overarching goals (what should/needs to be done).
Implications (i.e. What about the situation?) emerge from interpreting objects within frames. It constitutes a field of interpretation between objects and frames (e.g. phenotype schema). For instance, a ladder vehicle in use on an emergency response mission may be interpreted as temporarily lowered preparedness for an area (framing), but may also imply the extent of lowered preparedness. Accepting (or rejecting) new information elaborates the frame, e.g. information on when the ladder vehicle may again be ready for new missions elaborates the view on preparedness.
Objects (Of what?) emerge from refreshing/updating elements of the environment. Certain kinds of objects (cues) may evoke matching frames, if they capture the attention of the SA system. Objects can be recalled at the onset of events, supporting diagnosis, or be understood as they emerge, supporting prognosis of problems. Corresponding to the SEEV model, attention to objects relate to salience (in the environment), effort (of process versus the environment), expectancy (schema), and value (schema).
Of and along an e vent h orizon of plans (e.g. goals, plans to implement, scripts of implemented plans, specific planned actions), developments (actual, potential), and overarching purposes/frames. It represents awareness of uncertainty, timing, and spatial orientation of events, as well as their relations to plans and system mechanics. Awareness may focus on the current, but may also be future-oriented (prognosis) or look back (diagnosis). There is thus both a question of the process progress along the event horizon, but also a question of being aware of aspects of the event horizon. Uncertainty, which may differ between domains and between situations within domains, also limits the extent of the event horizon, and may give rise to forks in the horizon, representing alternative possibilities.
Figure 7. SA states, processes, and systems.
For rapidly escalating situations, SA buffering capacity may be a critical factor to achieve SA in time to make a difference for decision-making. Encountering unexpected/unplanned-for situations in high-stakes domains, the capacity for framing (generating new frames) can be equally critical. These capacities are thus central to system resilience (safety II). Therefore, it is important to differentiate between framing and implications (elaborations of frames), rather than grouping them into one category, e.g. ‘comprehension of elements’.
The SA process works through a SA system of subjects/agents (humans, or advanced automation), objects, and environments:
That may require constant integration of new environmental aspects, objects, and agents into the SA system. Although some system parts may be more or less permanent (e.g. instrumentation inside a car), other parts may be integrated temporarily (e.g. signage outside of the car).
That may act as mediators or catalysts for SA. They may act as mediators through representing and picking up facets of SA. They may act as catalysts through serving as a common point of departure for people to create SA together. SA then forms around the object rather than being mediated through it.
Constituent SA systems may together form larger SA systems, and may thus both have SA of their own as well as perform functions for achieving SA in the larger systems.
The SA process continuously results in systemic SA properties:
Task SA, the SA required for the present task.
Buffering SA regards awareness of the potential of consideration of possibilities/alternative accounts of situations. It draws on SA buffering capacity and capacity for framing the unknown.
Team SA regards people in the team having the SA that they need for their tasks, whereas meta SA refers to knowledge of the SA of others.
Shared and r edundant SA describes people in the team having the same SA (potentially so that those tasks can be taken over or monitored).
Compatible SA refers to the degree to which different ways of framing the situation in the system are compatible, rather than shared.
Transactive SA refers to passing on aspects of SA to other system parts.
This framework thus facilitates analysis based on three perspectives of SA (states, processes, and systems). In contrast to previous work on SA, this holistic framework allows analysis from all three perspectives simultaneously, but each perspective can also be applied on its own, depending on the needs of the analyst.
Other models that share the same basic action-feedback model could be used to provide more detail when required, as additional analytical lenses. For instance, with regard to aircrew decision-making, Endsley's Citation(1988) model provides detail with regard to workload, individual ability, as well as perceptions and conditions. A visual comparison between (b) and and outlines the relations between the two models, suggesting how the blue sections of (b) would relate to the corresponding circle segments in and . Similarly, other models could be used to analyse SA in more detail regarding control (, e.g. Hollnagel and Woods Citation2005; van Westrenen and Praetorius Citation2014), resilience (e.g. Lundberg, Törnqvist, and Nadjm-Tehrani Citation2012), or replanning and coordination (Kontogiannis Citation2010).
Application of the SA analysis framework
Below, applications of the SA framework are presented, based on enactments of air traffic control (ATC) tower situations conducted in a simulator in Sweden, with controllers and simulator pilots. Although the air traffic controller (ATC) knew the approximate idea of the scenario, to keep control of the enacted scenarios, the ATCO had to act as-if the scenarios were real. Each scenario determined starting points of aircraft, weather, and other factors. Simulator pilot(s) controlled all aircraft movements, according to the scenario, simulation, and in response to ATC activities.
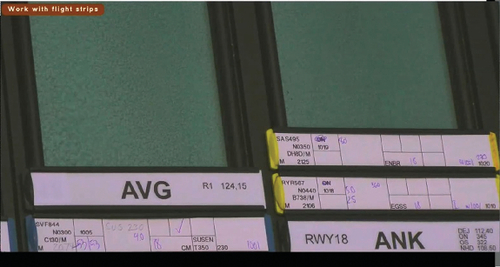
The simulated outside view and the radar display were recorded as seen by the ATCO, using frame grabbers connected to the simulator. Additional information, e.g. shown to the ATCO through physical instruments, was arranged as digital displays on a fifth display outside the ATC room, and also recorded through the use of a frame grabber. The usage of physical flight strips was recorded using an overhead video camera. The whole scene was recorded through an additional video camera. Furthermore, the ATCO was wearing eye-tracking glasses, recording what objects in the environment the controller looked at. For each recording, the video and audio sources were subsequently merged into a synchronised composite video. Excerpts below were selected by virtue of being short and clear illustrations of important aspects of SA.
An analysis of excerpts from four enactments is presented. The first excerpt (scenario 1) is based on a recording of a high workload scenario. Workload consisted of managing ground and air movements, as well as radio and telephone communications, at times occurring simultaneously. One controller (as ATCO) participated. The second excerpt (scenario 2) focused on long-term planning, demanding feed-forward control to avoid conflicts. The controller (as ATCO) made the decisions. To make decisions more explicit for analysis purposes, the ATCO was instructed to discuss decisions and situations with an assisting controller (normally working as a simulator pilot). The third (scenario 3a) and fourth (scenario 3b) excerpts focused on a separation infringement in the air, in the vicinity of the runway. The scenario focused on what happened after the ATC system detects the infringement; therefore the ATCO in each scenario was made aware of what would trigger the event (but not with regard to details of subsequent developments). This scenario was run twice, resulting in two comparable ways of managing the same situation. On one occasion, it was run with the controller in the executive ATCO position (and one of the simulator pilots in an assistant controller position), and on the other occasion with the simulator pilot in the ATCO position. The video excerpts were subsequently analysed qualitatively through the SA framework proposed in this paper.
SA states, system, and process
A video excerpt from the enactment of scenario 1 (see video supplement [available online] and ) illustrates the application of the SA modelling framework. In the excerpt, ATC clears an aircraft for landing. In a fast sweeping continuous motion over three areas, the ATCO simultaneously takes in, updates its SA state, and uses information across a (partly) dynamically formed SA system.
Figure 8. Updating SA, as a process driven by filling in a frame, through a script for information pickup and communication.

SA states
To analyse SA states, is divided into three parts, A--C, corresponding to perceptual exploration steps. The analysis starts with (a), aircraft on radar:
Objects: first, the SA state regards what’s there. In step A in , the object Lufthansa 345 is attended to, in particular, its call sign and position (cue, for a landing event).
Frames: SA regards what is going on at large, drawing a big picture of the situation. It is clear from what happens next that the ATCO interprets the situation as an aircraft approaching for landing, and that the ATCO follows a script for action to pick up the required information. The examination of the object (questioning the frame) thus appears to verify an expected frame (on the event horizon), rather than evoking a new (unexpected/unplanned) frame.
Implications: it appears that the ATCO interprets the situation as normal but requiring action (a landing clearance).
(b), wind display:
Objects: in step B, the ATCO picks up wind information, communicating it to the pilot who also reads it back.
Implications: it is clear from what happens next that to the ATCO and to the pilot, the wind information has no implications that would make it a hindrance for the planned/expected landing.
(c), air strip, landing clearance:
Objects: the ATCO examines the landing strip (object), which is empty.
Implications: the implication of the empty airstrip (within the frame) is that aircraft is clear to land.
Framing: the clearance also signifies an (expected) shift in the framing of the situation, along the event horizon, from approach to landing.
Event horizon ((a)–(c)): the ATCO is clearly aware of the temporal aspect of the event horizon, i.e. that the landing (implication) will occur in two minutes. The ‘clear to land’ utterance by the ATCO not only communicates the state of the airstrip, but is also a decision. The fact that the decision has been made is an important aspect of SA (e.g. awareness of plans and decisions, and may result in awareness of expected actions of others as a consequence of the decision). The landing event is thus projected on the horizon (the actual landing event) some time ahead (two minutes), with the current information that the airstrip is clear. The two-minute gap, moreover, introduces uncertainty, as to whether it will then still be clear to land. The ATC system has to monitor the airstrip to maintain SA over the event.
SA process
This example also illustrates how SA is an active process, and why this is as important to model as the SA state. The scan clearly follows a schema () of the landing event. ATCO gaze goes directly from the label of the aircraft, to the wind display, to the airstrip in the outside view, picking up (and immediately using) information relevant to the particular landing event. The actual scan A–C, only covers information that we can see and hear that the ATCO uses to manage the landing event. It is therefore clear that the information has been picked up – the ATCO has not merely looked at the displays. The ATCO does not look at any other information. Although it is important to model what SA is about (the SA state), the dynamics of SA and situational change, together with simultaneous usage, make it critical to, also, model how SA changes from one moment to the next.
Although the SA states are described following the perceptual exploration sequence, the actual situation appears to be more fluid (see video supplement). In particular, the ATCO gives the landing clearance during the scan of the airstrip (step C). A mix of feed-forward and feedback control is thus used (e.g. the ATCO would have had to take the clearance back if an object had been detected at the end of the scan of the airstrip). This excerpt is suggestive of monitoring a situation where frames are evoked by expectations (on the event horizon), rather than by objects/cues. Objects are explored and used to question expected frames, verifying whether the expected/planned situation (along the event horizon) is actually taking place.
SA system
The SA system has components that are relatively permanent, constituted by the local ATC environment (e.g. displays, outside view). Since the ATCO looks directly at the displays without search, they function (in this excerpt) seamlessly as a part of an SA system, as extended senses. It is clear that the SA process between components in this system places a very light load on ATCO memory. Since information is used simultaneously with pickup (a process aspect), uncertainty of SA state accuracy due to memory decay or environmental changes is low.
The example furthermore illustrates the dynamic formation of parts of the SA system. SA is maintained between the pilot and the controller, as a small system, that has formed dynamically when needed, and that will dissolve when no longer required. The ATCO is part of the aircraft SA system, providing, e.g., wind information (step B), but the aircraft is also part of the ATC SA system (e.g. confirming information and intentions).
Finally, in systems, SA can refer to properties of wholes, individuals, and transactions. With regard to systemic SA properties, this excerpt illustrates:
Task SA, that information relevant for the landing event is picked up and interpreted is shown through the gaze pattern and the verbal exchanges.
Shared SA can only be determined with regard to the SA aspects that are transactive, since the readback from the simulated aircraft confirms only the transactive SA aspects. The transactions can be observed in steps B (wind) and C (runway clearance).
Compatible SA between pilot and ATC is suggested by the unfolding event, since the subsequent landing occurs without communications or events indicating confusion.
Determining the event horizon
Previous studies (e.g. Endsley and Rodgers Citation1994) have stipulated that ATC SA concerns elements and the whole situation in the present/the near future. This presupposes, although vaguely, the extent of the event horizon. It thereby de-emphasises that it can be critical to be aware of particular temporal aspects of the event horizon.
In contrast, determining times for future events is central to ATC SA, as illustrated by enactment 2 (). At 10:43, the primary ATCO plans departure of SWF884 for 10:53. This can be clearly seen on the flight strip where the information is noted (). The time frame is several minutes ahead. The departure time is important, since it is a potential time for conflict with other landing or departing aircraft, as well as with ground vehicles that need to cross the runway. This aspect is an important condition and pre-condition for planning of other events.
Figure 9. Synchronised video sources for recording X, at 10:49:37. ATC tower room and simulated outside view (top mid), ground radar (middle, not available to the ATC, added to show aircraft positions more clearly), ATC eye-point-of-gaze recording (for the ATC on the right).

Figure 10. SWF833 is taking off (in the air, just above the runway). On the flight strip for SWF 833, the planned/predicted departure time (53) was first noted, and the actual departure time (also 53) was later noted beside the first number.
The excerpt also exemplifies awareness of maintaining critical constraints along the horizon, e.g. separation between events (regardless of the precise timing of the events). At 10:47, one aircraft is just about to land, and two aircraft (RYR 567 and SAS495) have entered the airspace around the airport (). The ATCOs are concerned with separation of the landing events of the two aircraft. They first discuss what route SAS495 will take, if continuing without intervention. They conclude that it will take the route through JANET, toward DEJ (projection along the event horizon). The primary ATCO first decides to reduce the speed of SAS495 (at 10:48), and then after about one minute the aircraft is told that it is number two in line for landing.
Figure 11. Radar image, at 10:47:02.
Both plans and timing of events are central aspects of event horizon SA, as illustrated by what happens next. At the same time as the two aircraft approach for landing, SWF844 is going toward a holding point on the ground preparing for take-off. At 10:49, the two ATCOs discuss how time-consuming that ground move will be. They discuss it in relation to the two aircraft moving toward the airport to land (see ), pointing at the radar screen and discussing the route of RYR567. At 10:50, they give RYR576 a course change to achieve a quicker approach. This results in an event horizon of ATCO intentions and plans as well as their expectations of timing of events that would occur without intervention.
The excerpt not only exemplifies how the radar display mediates SA (e.g. positions), but also exemplifies how it functions as a catalyst for SA, with a discussion about future developments forming around the display, rather than being mediated in it. Usage of the flight strip is also an example of externalising SA, since the human SA system part can then refresh this information through the flight strip, rather than relying on memory.
Dynamic formation of situation awareness systems
When discussing distributed or shared SA, this presupposes that a system exists, wherein SA can be distributed or shared. This may be the case as in excerpt 1 (), when stationary equipment is used to extend ATCO senses, or as in excerpt 2 () when two co-located ATCOs share work between themselves. Dynamic formation of SA systems, in contrast, concerns more temporary systems or inclusions of objects or agents. In excerpt 1, for instance, the ATCO became part of the aircraft SA system, conveying information about the wind direction and strength. There are, however, sometimes choices to be made of what system to form, which may have consequences for SA and for the ability to control events. As the following juxtaposed examples (enactments 3a and 3b) of scenario 3 () show, SA systems are sometimes short-lived. The two examples illustrate consequences of SA system alignment, of what system is formed to cope with the situation. The scenario concerns a separation incident regarding a small aircraft with an inexperienced pilot, who misunderstands a direction given by the ATCO (SEGOA, scenario 3a; SEILY, scenario 3b). This causes a separation conflict () when the small aircraft crosses the planned path of an arriving jet (SAS343, scenario 3a; FIN881, scenario 3b).
Table 1. Comparison between two enactments of scenario 3.
Figure 12. Part of radar image.

Although steps 1–4 are not strictly identical in the two enactments, the situation in step 5 is initially the same. The small aircraft is in approximately the same position compared to the larger aircraft; the larger aircraft has the same trajectory toward landing; and the small aircraft makes the same misunderstanding. Step 5 is initiated with the small aircraft making the same incorrect (but expected by the ATCO) manoeuvre.
In step 6, the situation develops differently depending on what temporary SA system is formed to resolve it. The attempt to solve the situation through controlling the large aircraft is immediately successful in scenario 3a (, left column), whereas the attempt to control the situation through the smaller aircraft initially fails in scenario 3b (, right column). The smaller aircraft does not understand the repeated instruction to continue on the left downwind in scenario 3b.
System SA can be described as follows:
Compatible SA: In this scenario, SA within the system is incompatible between the constituent agents (ATC+pilot). Event horizon SA differs between the agents (in both scenarios), with regard to the current plan for the aircraft, which is in this situation incompatible to uphold a critical system constraint (aircraft separation).
Team SA is not necessarily lacking between ATC and the larger approaching aircraft, since it is the task of the ATC to maintain separation – the pilots in the different aircraft have other tasks.
Transactive SA and shared SA: in scenario 3a, the ATCO shares SA about the ‘light civilian aircraft’ nearby (row 4). From the point of view of resilience, this potentially increases the capacity of the larger system to manage unexpected/unplanned events. In a real situation, awareness of the light aircraft could make it easier for the pilots to frame the situation in the next step, to understand why they are suddenly instructed to make a turn. This can be important when pilots are not strictly required to monitor other aircraft (as part of their task SA). The information is also conveyed, implicitly, in scenario 3b (, row 1), informing the larger aircraft that it is number one for landing. It can thus facilitate buffering SA.
Buffering SA: after the initiation of the conflict (the wrong turn by the light aircraft), the two scenarios represent two alternative turns of events. We cannot know for sure what event horizon options the ATCOs considered before making their respective decisions. There is, however, not much time (about two seconds) between eye focus on the aircraft and the instruction to turn, in either of the scenarios. With such short time spans, there is not much time to mentally simulate potential developments – consideration of developments must then be based on recognition. Buffering SA then relies on previously established buffering capacity/sensemaking variety.
Control is only regained when the instruction to turn is directed at the larger aircraft. The delay in scenario 3b is only about 15 seconds, but in situations with margins that are even narrower, that can make a big difference. The decision of what SA system to form can affect the integrity of the system, in this case with regard to compatible SA. The dynamic formation of the SA system is therefore an important part of staying in control, and the selection of what agent to involve is an important decision.
Discussion and conclusion
The holistic SA framework proposed in this paper couples the state, the ‘moment of SA’ both to the process of updating SA and to the system that updates and is the subject of SA. It thus differs both from notions of SA that primarily describes it in terms of states, isolated from process and system, and of process- or system-centric notions. It facilitates holistic analyses from all three perspectives, as well as analyses from one or two of the perspectives (see e.g. the first analysis example above).
How to define the ‘moment of SA’, of when it can be captured and of what has then been captured, is a critical question to ask regarding SA state descriptions. As also argued elsewhere (see e.g. Patrick and Morgan Citation2010), SA states and processes are interdependent. Perhaps most central to the discussion, some explorations of the context to achieve SA are executed only at the particular moments when there are particular decisions to be made; e.g. the ‘clear-to-land’ decision in the example in this article relies on SA acquired as the event unfolds. It may not be exactly the same either before the event, or after it. Specifically, SA changes during the moment-to-moment execution of control of the event. Clearly, the landing situation cannot be said to have been any safer if the controller had sufficient SA long before the landing event, because due to decay in memory and potential changes to the situation, it must in any case be updated. Thus, one cannot argue that an SA measure of memory of all the relevant aspects for landing (e.g. wind, whether the landing strip is clear) before the onset of the event would predict SA performance during the event. Only the execution of the process ensures sound SA.
However, as the examples also illustrate, there are particular objects of SA that must be remembered or externalised and then re-sampled, to be present-to-considered in awareness. For instance, the ATC system must have SA of predicted future landing times when planning landing times of other approaching aircraft, or when planning future departure slots. Thus, only a holistic description can fully capture SA for this situation. The SA state of any SA snapshot taken can be defined by process aspects such as:
What frames are currently active (versus potential frames that are not active, but relevant, within the system).
Where in the process of sampling the system currently is versus active frames and salient cues.
Prioritising achieving SA relevant for the task at hand (task SA) versus SA directed at contingencies and exploration of alternative accounts of events (buffering SA).
The capacity and the preparedness to generate ‘new’ frames.
The moment of sampling versus drawing on SA (in, e.g., control or coordination processes), versus decay.
Dependencies between SA states, processes, and systems are also of importance, considering methods measuring SA outside of the particular context in which SA is normally maintained. SA state snapshot descriptions may misrepresent what goes on without descriptions of the SA system in which SA emerges, due to system aspects such as:
Sampling patterns versus the available environment/system (natural and designed). Clearly, as the first example shows, the displays are like an extension of the senses of the controllers. Excluding them from the description excludes an important aspect of SA. Removal of the environment may disrupt natural scan patterns (e.g. guided by schema) that fuse humans and environments into SA systems, and may thus result in misleading SA descriptions.
Agents also alter the context themselves, e.g. ATCO making notes of developments and events, which if removed fundamentally, alters the prerequisites of SA.
Continuous re-shaping of the cognitive system, as is relevant in many domains (such as ATC), is important for aspects such as transactive SA, team SA, compatible SA, and redundant SA. Removing a person from the description of the system, or removing the description of the transactions, would misrepresent what should be measured. As in the example above, including the passenger jet versus including the small aircraft into the SA system affects SA performance.
Catalysts in the environments and collaborations around them, that normally result in good SA.
A need to distinguish between various SA systems properties, such as task SA versus shared, compatible, buffering, transactive, or team SA.
Regarding analysis of particular SA states, the distinction between frames and implication is important from a resilience engineering perspective. A particular problem for SA analyses is that what was critical may only be known for certain in hindsight. This hinders quantification of what the specific ‘necessary SA’ at each moment in time really is. This unfortunately may result in a focus on stability, e.g. the factual, the regularly occurring, or on the expected or prepared-for, which resembles what is now called the safety I approach (Hollnagel Citation2013; Lundberg and Johansson Citation2006). With a current focus in safety literature on safety II, on resilience toward the unexpected or unplanned-for, a notion of SA must also be useful for analyses encompassing safety II. Distinguishing between frames and implications is a step toward this, as is the inclusion of the descriptive notion ‘buffering SA’.
Thus, SA states should be described using four facets, rather than the traditional (e.g. Endsley Citation1995) three, namely: f rames (What is going on?), i mplications (What about it?), o bjects (Of what?), and e vent horizon (When, where, what relation to plans and system mechanics?).
SA may in some cases be achievable without knowing what to do in the same situations. However, understanding can also require awareness of an event horizon of own plans, including outcomes and preconditions for action. Examples were given above of plans for ATC (projected timings of arriving aircraft, planned times for landing or departures). Arguably, this is characteristic of situations with human involvement. This reflects what is known about highly trained and competent experts from NDM and RPD, namely a strong ability to project/predict/plan events on the horizon based on previous experience. In this SA framework, expert performance is reflected in the buffering capacity/sensemaking variety of the SA system. Resilient systems should be able to adjust their buffering capacity during events (e.g. generating new frames to make sense situations, adjusting the capacity to make sense of situations). Furthermore, they should also be able to adapt buffering capacity to changing circumstances in advance of events (e.g. through training). The viability of attempts to predict a wide range of potential situations, and to monitor changes in circumstances in advance of events, may also differ between domains and between situations within domains. Thus, although competence is not a part of per se SA, it may be a prerequisite for SA, in particular in projecting future developments (e.g. through plans). Ultimately, what to include in particular analyses is an empirical question versus particular domains and situations in question.
As noted by Lau, Jamieson, and Skraaning Citation(2013), different domains have different characteristics, highlighting different aspects of SA. For instance, in process control, SA may be driven by mental models of a plant, continuously compared to a situation model. In contrast, in military contexts, SA may instead be driven by comparisons to plans and how they play out. This calls for domain-specific definitions of SA. However, the main characteristics of domains may not be characteristic of all situations of relevance for analysis, in the domain. As the examples in this paper have illustrated, plans and how they play out are also important in domains such as Air Traffic Control. Thus, what facets of the framework are most important should not be fully decided a priori the analysis. This stands in contrast to taking, e.g., a framework devised for fighter pilots (Endsley Citation1988), then applying it to a different domain (ATC) by defining domain-specific instantiations of the framework facets (Endsley and Rodgers Citation1994).
A specific example of an empirically driven definition of SA is given above in the example of determining the event horizon. These spatio-temporal aspects, of determining the event horizon, are arguably critical facets of SA. However, rather than attempting to decide what timings are critical for the domain a priori (e.g. the ‘near’ future, whatever that may mean), what spatio-temporal SA is actually achieved is an empirical question.
Rather than attempting to devise a completely new framework for each domain, what is proposed here is a basic holistic framework of aspects that cut across domains (across frameworks). For instance, an event horizon is a shared facet between many SA conceptualisations. However, different situations and domains may require different ways of modelling it in detail. Using a basic SA framework as the point of departure, what characterises each domain or characterises an analytical focus can be described. Ideally, new frameworks should share similar ways of description, where possible, only adding genuinely new facets. In this way, incrementally, progress in SA research can be made.
In conclusion, future SA research should not be about whether to analyse SA as a state, process, system, or memory component, but about how to continue the integration of these perspectives into a coherent holistic framework. A rich, elaborate framework of SA may be beneficial for the analysis of specific situations that may deviate from norms in a domain. Frameworks that focus narrowly of main characteristics of domains will not always suffice. A rich, elaborate approach to SA requires expertise in devising SA measures, and a sensitivity to situational and domain characteristics. This also calls for evolving a rich theoretical construct of SA, underlying current models, and a critical ongoing review of current tools and methods versus this rich framework.
Supplemental_video_Figure8_Lundberg_TTIE.mov
Download QuickTime Video (15.4 MB)Acknowledgements
This paper was supported by LFV Air Navigation Services of Sweden through the project Amplify Teamwork with Automation. The tower simulation recordings were also supported by Tobii Technology.
Additional information
Notes on contributors
Jonas Lundberg
Jonas Lundberg is a Reader at the Department of Science and Technology at Linköping University, Sweden. Jonas was awarded his PhD in Computer Science in 2005 by Linköping University.
Related Research Data
References
- Adams, M.J. , and R.W. Pew . 1990. “Situational Awareness in the Commercial Aircraft Cockpit: A Cognitive Perspective.” Paper presented at the IEEE/AIAA/NASA 9th Digital Avionics Systems Conference, Virginia Beach, VA, October 15–18.
- Artman, H. 2000. “Team Situation Assessment and Information Distribution.” Ergonomics 43 (8): 1111–1128. doi:https://doi.org/10.1080/00140130050084905.
- Artman, H. , and C. Garbis . 1998. “Situation Awareness as Distributed Cognition.” In Cognition and Cooperation. Proceedings of 9th Conference of Cognitive Ergonomics , edited by T. Green, L. Bannon, C. Warren, and J. Buckley, 151–156. Le Chesnay, France: EACE.
- Ashby, W.R. 1956. An Introduction to Cybernetics . London : Chapman & Hall.
- Bryant, D.J. 2006. “Rethinking OODA: Toward a Modern Cognitive Framework of Command Decision Making.” Military Psychology 18 (3): 183–206. doi:https://doi.org/10.1207/s15327876mp1803_1.
- Carretta, T.R. , D.C. Perry, Jr. , and M.J. Ree . 1996. “Prediction of Situational Awareness in F-15 Pilots.” The International Journal of Aviation Psychology 6 (1): 21–41. doi:https://doi.org/10.1207/s15327108ijap0601_2.
- Dekker, S.W.A. , D.H. Hummerdal , and K. Smith . 2009. “Situation Awareness: Some Remaining Questions.” Theoretical Issues in Ergonomics Science 11 (1–2): 131–135. doi:https://doi.org/10.1080/14639220903010092.
- Dominguez, C. 1994. “Can SA Be defined?” In Situation Awareness: Papers and Annotated Bibliography, Report AL/CF-TR-1994–0085 , edited by M. Vidulich , C. Dominguez , E. Vogel , and G. McMillan . Wright-Patterson Air Force Base, OH : Air Force Systems Command.
- Dörfel, D. , and H. Distelmailer . 1997. “Enhancing Situational Awareness by Knowledge-Based User Interfaces.” In The Second Annual Symposium and Exhibition on Situational Awareness in the Tactical Air Environment , 197–205. Patuxent River, M D : Naval Air Warfare Center Aircraft Division.
- Endsley, M.R. 1988. “Situation Awareness Global Assessment Technique (SAGAT).” Paper presented at the Proceedings of the National Aerospace and Electronics Conference (NAECON), Dayton, OH , May 23–27.
- Endsley, M.R. 1990. “Predictive Utility of an Objective Measure of Situation Awareness.” Proceedings of the Human Factors and Ergonomics Society Annual Meeting 34 (1): 41–45. doi:https://doi.org/10.1177/154193129003400110.
- Endsley, M.R. 1993. “A Survey of Situation Awareness Requirements in Air-to-Air Combat Fighters.” The International Journal of Aviation Psychology 3 (2): 157–168. doi:https://doi.org/10.1207/s15327108ijap0302_5.
- Endsley, M.R. 1995. “Toward A Theory of Situation Awareness in Dynamic Systems.” Human Factors: The Journal of the Human Factors and Ergonomics Society 37 (1): 32–64.
- Endsley, M.R. , and W.M. Jones . 1997. “Situation Awareness Information Dominance & Information Warfare.” (AL/CF-TR-1997-0156) 1–73. Wright-Patterson AFB, OH : United States Air Force Armstrong Laboratory.
- Endsley, M.R. , and M. Rodgers . 1994. “Situation Awareness Information Requirements for En Route Air Traffic Control.” (DOT/FAA/AM-94/27) Washington, DC : Federal Aviation Administration Office of Aviation Medicine.
- Gugerty, L. , and M. Falzetta . 2005. “Using an Event-Detection Measure to Assess Drivers’ Attention and Situation Awareness.” Proceedings of the Human Factors and Ergonomics Society Annual Meeting 49 (22): 2004–2008. doi:https://doi.org/10.1177/154193120504902225.
- Hollnagel, E. 1993. “Human Reliability Analysis: Context and Control.” In Computers and People Series , edited by B.R. Gaines , and A. Monk . London : Academic Press.
- Hollnagel, E. 2013. “A Tale of Two Safeties.” Nuclear Safety and Simulation 4 (1): 1–10.
- Hollnagel, E. , and D.A. Woods . 2005. Joint Cognitive Systems: Foundations of Cognitive Systems Engineering . Boca Raton, FL : CRC Press.
- Horrey, W.J. , C.D. Wickens , and K.P. Consalus . 2006. “Modeling Drivers’ Visual Attention Allocation While Interacting With In-Vehicle Technologies.” Journal of Experimental Psychology: Applied 12 (2): 67–78. doi:https://doi.org/10.1037/1076-898X.12.2.67.
- King, P.A. 1987. “Big Picture: A Solution to the Problem of Situation Awareness.” Paper presented at the IEEE Proceedings of the National Aerospace and Electronics Conference, Dayton, OH, May 18–27.
- Klein, G. , and R. Calderwood . 1991. “Decision-Models – Some Lessons from the Field.” IEEE Transactions on Systems Man and Cybernetics 21 (5): 1018–1026.
- Klein, G. , R. Pliske , B. Crandall , and D.D. Woods . 2005. “Problem Detection.” Cognition, Technology & Work 7 (1): 14–28. doi:https://doi.org/10.1007/s10111-004-0166-y.
- Klein, G. , S. Wiggins , and C.O. Dominguez . 2010. “Team Sensemaking.” Theoretical Issues in Ergonomics Science 11 (4): 304–320. doi:https://doi.org/10.1080/14639221003729177.
- Kontogiannis, T. 2010. “Adapting Plans in Progress in Distributed Supervisory Work: Aspects of Complexity, Coupling, and Control.” Cognition, Technology & Work 12 (2): 103–118. doi:https://doi.org/10.1007/s10111-010-0150-7.
- Lau, N. , G.A. Jamieson , and G. Skraaning . 2013. “Distinguishing Three Accounts of Situation Awareness Based on Their Domains of Origin.” Proceedings of the Human Factors and Ergonomics Society Annual Meeting 57 (1): 220–224. doi:https://doi.org/10.1177/1541931213571049.
- Lundberg, J. , and M. Asplund . 2011. “Communication Problems in Crisis Response.” In Proceedings of the 8th International ISCRAM Conference, edited by Maria Santos, A., Luísa Sousa and Eliane Portela. Lisbon, Portugal: National Civil Engineering Laboratory.
- Lundberg, J. , and B. Johansson . 2006. “Resilience, Stability and Requisite Interpretation in Accident Investigations.” Proceedings of 2nd Resilience Engineering Symposium, 191–198, Juan-les-Pins, November 8– 10 .
- Lundberg, J. , J. Johansson , C. Forsell , and B. Josefsson . 2014. “The Use of Conflict Detection Tools in Air Traffic Management – An Unobtrusive Eye Tracking Field Experiment During Controller Competence Assurance.” HCI-Aero 2014 – International Conference on Human–Computer Interaction in Aerospace, Silicon Valley, C A , July 30–August 1 .
- Lundberg, J. , E. Törnqvist , and S. Nadjm-Tehrani . 2012. “Resilience in Sensemaking and Control of Emergency Response.” International Journal of Emergency Management 8 (2): 99–122. doi:https://doi.org/10.1504/IJEM.2012.046009.
- Lundberg, J. , E.K. Törnqvist , and S. Nadjm-Tehrani . 2014. “Establishing Conversation Spaces in Hastily Formed Networks: The Worst Fire in Modern Swedish History.” Disasters 38 (4): 790–807. doi:https://doi.org/10.1111/disa.12076.
- Macquet, A.-C. , and N.A. Stanton . 2014. “Do the Coach and Athlete Have the Same “Picture” of the Situation? Distributed Situation Awareness in an Elite Sport Context.” Applied Ergonomics 45 (3): 724–733. doi:https://doi.org/10.1016/j.apergo.2013.09.014.
- Mendonca, D. , and W.A. Wallace . 2006. “Adaptive Capacity: Electric Power Restoration in New York City Following the 11 September 2001 Attacks.” 2nd Resilience Engineering Symposium, 209–219, Antibes -- Juan-Les-Pins, November 8–10.
- Miller, G.A. 1956. “The Magical Number Seven, Plus or Minus Two: Some Limits on Our Capacity for Processing Information.” Psychological Review 63 (2): 81–97. doi:https://doi.org/10.1037/h0043158.
- Minsky, M. 1975. “Minsky's Frame System Theory.” In Proceedings of the 1975 Workshop on Theoretical Issues in Natural Language Processing , edited by Shank and Nash-Weber. Cambridge, M A : Association for Computational Linguistics.
- Moore, K. , and L. Gugerty . 2010. “Development of a Novel Measure of Situation Awareness: The Case for Eye Movement Analysis.” Proceedings of the Human Factors and Ergonomics Society Annual Meeting 54 (19): 1650–1654. doi:https://doi.org/10.1177/154193121005401961.
- Neisser, U. 1976. Cognition and Reality: Principles and Implications of Cognitive Psychology . San Fran c isco , CA : W.H. Freeman and Company.
- Patrick, J. , and P.L. Morgan . 2010. “Approaches to Understanding, Analysing and Developing Situation Awareness.” Theoretical Issues in Ergonomics Science 11 (1–2): 41–57. doi:https://doi.org/10.1080/14639220903009946.
- Rantanen, E. 1994. “The Role of Dynamic Memory in Air Traffic Controllers’ Situation Awareness.” In Situational Awareness in Complex Systems – Proceedings of a CAHFA Conference , edited by D. Richard Gilson , J. Daniel Garland, and M. Jefferson Koonce, 209–215. Daytona Beach, F L : Embry-Riddle Aeronautical University Press.
- Regal, D. , W. Rogers , and G. Boucek . 1988. “Situational Awareness in the Commercial Flight Deck: Definition, Measurement, and Enhancement.” Paper presented at Aerospace Technology Conference and Exposition, Anaheim, CA, October 3–6. (SAE Technical Paper 881508). Warrendale, PA: SAE.
- Salas, E. , R.J. Stout , and A.C.-B. Janis . 1994. “The Role of Shared Mental Models in Developing Shared Situational Awareness.” In Situational Awareness in Complex Systems – Proceedings of a CAHFA Conference , edited by D. Richard Gilson , J. Daniel Garland , and M. Jefferson Koonce , 297–304. Daytona Beach, F L : Embry-Riddle Aeronautical University Press.
- Salmon, P.M. , N.A. Stanton , G.H. Walker , C. Baber , D.P. Jenkins , R. McMaster , and M.S. Young . 2008. “What Really is Going on? Review of Situation Awareness Models for Individuals and Teams.” Theoretical Issues in Ergonomics Science 9 (4): 297–323. doi:https://doi.org/10.1080/14639220701561775.
- Sarter, N.B. , and D.D. Woods . 1991. “Situation Awareness: A Critical But Ill-Defined Phenomenon.” The International Journal of Aviation Psychology 1 (1): 45–57. doi:https://doi.org/10.1207/s15327108ijap0101_4.
- Shorrock, S.T. 2005. “Errors of Memory in Air Traffic Control.” Safety Science 43 (8): 571–588. doi:https://doi.org/10.1016/j.ssci.2005.04.001.
- Smith, K. , and P.A. Hancock . 1995. “Situation Awareness Is Adaptive, Externally Directed Consciousness.” Human Factors 37 (1): 137–148.
- Sorensen, L.J. , N.A. Stanton , and A.P. Banks . 2011. “Back to SA School: Contrasting Three Approaches to Situation Awareness in the Cockpit.” Theoretical Issues in Ergonomics Science 12 (6): 451–471. doi:https://doi.org/10.1080/1463922X.2010.491874.
- Stanton, N.A. , P.M. Salmon , G.H. Walker , and D.P. Jenkins . 2009a. “Genotype and Phenotype Schemata and Their Role in Distributed Situation Awareness in Collaborative Systems.” Theoretical Issues in Ergonomics Science 10 (1): 43–68. doi:https://doi.org/10.1080/14639220802045199.
- Stanton, N.A. , P.M. Salmon , G.H. Walker , and D.P. Jenkins . 2009b. “Is Situation Awareness All in the Mind?” Theoretical Issues in Ergonomics Science 11 (1–2): 29–40. doi:https://doi.org/10.1080/14639220903009938.
- Stanton, N.A. , R. Stewart , D. Harris , R.J. Houghton , C. Baber , R. McMaster , P. Salmon , et al. 2006. “Distributed Situation Awareness in Dynamic Systems: Theoretical Development and Application of an Ergonomics Methodology.” Ergonomics 49 (12–13): 1288–311. doi:https://doi.org/10.1080/00140130600612762.
- van Westrenen, F. , and G. Praetorius . 2014. “Situation Awareness and Maritime Traffic: Having Awareness or Being in Control?” Theoretical Issues in Ergonomics Science 15 (2): 161–180. doi:https://doi.org/10.1080/1463922X.2012.698661.
- Westrum, R. 2006. “A Typology of Resilience Situations.” In Resilience Engineering: Concepts and Precepts , edited by E. Hollnagel , D. Woods , and N. Leveson , 55–65. Aldershot : Ashgate.
- Wohl, J.G. 1981. “Force Management Decision Requirements for Air Force Tactical Command and Control.” IEEE Transactions on Systems, Man and Cybernetics 11 (9): 618–639. doi:https://doi.org/10.1109/TSMC.1981.4308760.
- Woods, D.D. 2006. “Essential Characteristics of Resilience.” In Resilience Engineering: Concepts and Precepts , edited by E. Hollnagel , D.D. Woods , and N. Leveson . Aldershot : Ashgate .